











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1. Introducción
México es un país con graves deficiencias en la rehabilitación de personas que viven con discapacidad en sus extremidades, ya sea por amputación o de origen congénito. Diariamente en el país se realizan 75 amputaciones, es decir, más de 25 000 personas al año se suman a tener que vivir con la ausencia de uno o más miembros (Vázquez, 2016). Llama la atención que si bien, las amputaciones traumáticas que se dan como resultado de accidentes, no representan más que el 16% del total de amputaciones anuales, dichos eventos se presentan principalmente en niños y adolescentes durante la manipulación de herramientas manuales o artefactos del hogar (Híjar, 2016). Así mismo, se suma a este fenómeno ocurrido a temprana edad, la prevalencia de imperfecciones congénitas responsables por la ausencia de las extremidades o presencia de extremidades incompletas en el recién nacido (Vázquez, 2016).
Vivir sin una extremidad es una experiencia física y emocional devastadora, sin embargo, se vuelve especialmente desafiante cuando esta situación se vive durante la infancia ya que, no solo afecta al individuo, sino a toda la familia y particularmente a los padres, a quienes suele costarles aceptar la nueva situación de vida que su hijo tendrá que atravesar (Smith, 2006), ver Figura 1.

Fuente: elaboración propia.
Figura 1 Primer acercamiento por parte de los familiares de niño con malformación para conocer más detalles acerca de esta propuesta de protetización.
Desde la perspectiva epidemiológica, la ausencia de un miembro corporal ya sea por amputación o deficiencia congénita, en niños y adolescentes tiene mayor incidencia en miembros superiores que inferiores (Rosas, 2016). Cualquier nivel de amputación de miembro superior repercute en todos los aspectos de la vida de la persona afectada, provocando afectaciones funcionales, estéticas, psicológicas y socio-laborales, sobre todo si ocurren en edades tempranas (López, 2009).
Cuando se habla de miembro superior, no se refiere únicamente a las funciones prensiles de la mano humana, sino a una amplia gama de funciones motrices, finas y de fuerza, o como instrumento de interacción social y expresividad emocional. Mismas que luego de una amputación, deben ser subsanadas lo antes posible si se desea la rehabilitación integral para prever la pérdida de las funciones residuales. En México esta situación se aborda mediante terapia psicológica, fisioterapia y el uso de prótesis y órtesis.
La percepción tradicional sobre el uso de prótesis es la de recuperar las funciones íntegras del miembro, sin embargo, la realidad es que hasta el día de hoy las prótesis otorgan una capacidad motriz limitada, incluso para las más complejas manos protésicas disponibles en el mercado. A pesar de ello, el uso de la prótesis otorga beneficios más allá que la recuperación funcional.
La finalidad principal de las prótesis de miembro superior es restaurar la funcionalidad perdida por causa de la amputación o de una malformación congénita, también no es menos importante recuperar la imagen física, la simetría corporal, gracias a la prótesis y su peso, sobre todo en los niveles proximales, reinstaurándose aunque sea parcialmente el centro de gravedad corporal, lo que evita estrategias automáticas de compensación que generan actitudes posturales anómalas que podrían provocar escoliosis o tortícolis, especialmente cuando se trata de niños (López, 2009).
Aunado a esto, la rehabilitación en niños difiere considerablemente de los adultos, sobre todo si se trata de miembro superior, debido al reto que representa el crecimiento constante, el adecuado ajuste de la prótesis con el muñón, la proporción estética con las demás extremidades y la aceptación o apropiación de la prótesis en su vida (López, 2010).
Lo anterior describe los retos que las prótesis convencionales disponibles en el mercado mexicano no han sabido enfrentar, limitándose a ser representaciones en miniatura de soluciones protésicas aplicadas en adultos, pero que no así tienen incidencia real en la rehabilitación del infante, dando como resultado el rechazo del dispositivo al provocar afectaciones físicas causadas por el exceso de peso con el que cargan, tales como dolor lumbar, caídas ocasionadas por alteraciones en el equilibrio o golpes involuntarios autoinfligidos o a terceros, consecuencia de la desproporción y asimetría que ocasionan, ver Figura 2.

Las prótesis para miembro superior fabricadas mediante impresión 3D se han convertido en tendencia a nivel internacional, principalmente debido al bajo costo que representan, la rapidez en la que se genera un modelo y, sobre todo, la versatilidad en formas y colores que atrapan la atención de las personas que las necesitan, pues no se parecen a los aparatos ortopédicos pesados y visualmente toscos con los que generalmente son atendidos por los especialistas en órtesis y prótesis tradicionales.
En México estas propuestas se han intentado reproducir, aunque sin cambios formales y funcionales significativos. Este articulo describe un diseño con enfoque diferente en cuanto a la eficiencia de la prensión y la seguridad que provee al usuario.
2 Materiales y equipos
A continuación, se enlistan los materiales y equipos empleados en el desarrollo de esta investigación.
2.2 Equipos
Impresora 3D FDM marca Creality, modelo Ender 3, garganta all-metal, boquilla 0.4 mm.
Impresora 3D FDM marca Creality, modelo CR10, boquilla 0.6 mm.
Impresora 3D FDM marca Anycubic, modelo Delta linear PLUS, boquilla 0.4 mm.
Máquina remachadora manual tipo chango.
Pistola de calor marca Titán.
Cinta métrica.
Vernier milimétrico.
Kinect Xbox One utilizado como escáner 3D.
2.3 Materiales
Filamentos de Ácido Poliláctico (PLA por sus siglas en inglés), de 1.75 mm, presentación 1 kg, colores varios.
Filamentos de Poliuretano Termoplástico (TPU por sus siglas en inglés), de 1.75 mm, presentación 1 kg, color negro.
Filamentos de Polietileno Tereftalato Glicol (PETG por sus siglas en inglés), de 1.75 mm, presentación de 1 kg, colores varios.
Pliego de cuero de cabra curtido color café.
Rollo de monofilamento de nylon para pesca de 1 m.
Rollo de monofilamento de nylon para pesca de 0.3 mm.
Remaches de aluminio varios.
Tornillos milimétricos varios.
3 Métodos experimentales
Como parte de la investigación, se realizó el Estado del Arte, con la finalidad de identificar y comparar dimensiones, materiales, estructura, uso, función y tipo de tecnología de los diferentes modelos de prótesis para uso infantil disponibles en el mercado mexicano. Además, se analizaron los resultados de las entrevistas, observaciones directas e indirectas sobre el manejo de las prótesis y como el niño interactúa con su medio, esto con el objeto de identificar los requerimientos del diseño y continuar con el desarrollo del prototipo tal como se describe a continuación.
Previo a la autorización oral y escrita de los involucrados, se realizaron entrevistas bajo una serie de preguntas de control tanto a los padres de familia como a los niños, con la finalidad de identificar las actividades que integran su rutina diaria, sus expectativas respecto al uso de una prótesis, las actividades que presentaban mayor dificultad de llevar a cabo por sí solos y finalmente separando y dando prioridad a aquellas que surgen como iniciativa del menor por sobre las que sus padres consideran como necesarias.
Las observaciones directas se realizaron posterior a las entrevistas, en un ambiente controlado donde se les pedía realizar tareas sencillas, dinámicas y retos básicos con objetos de diferentes formas y tamaños, solicitados con la finalidad de observar el nivel de capacidad residual y limitaciones que presentan. Su desempeño y comentarios durante las dinámicas fueron documentados en video. Por otro lado, la observación indirecta se realizó de manera casual a través de videos y fotografías del usuario en su hogar, realizando actividades cotidianas y compartidas por los mismos familiares.
3.1 Comprensión del funcionamiento de las prótesis convencionales y las partes que la conforman
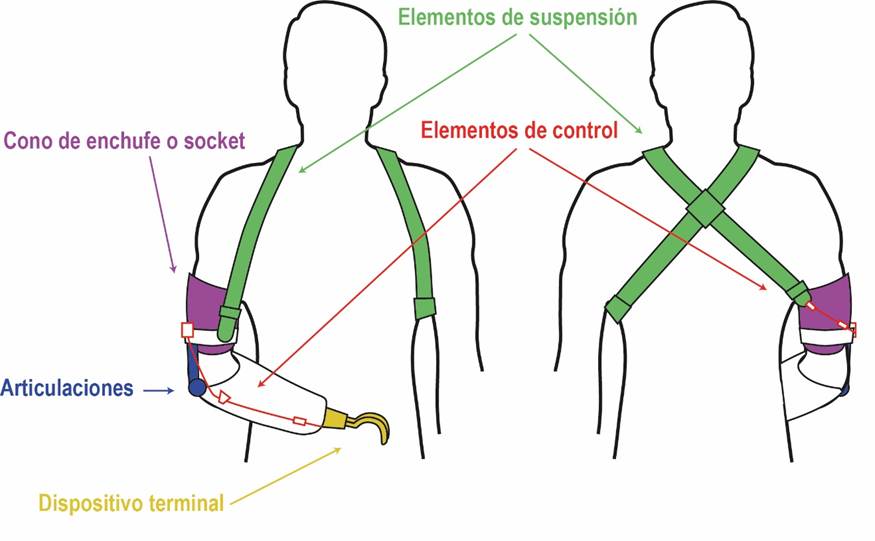
Cualquiera de las prótesis disponibles en el mercado, ya sean mecánicas o mioeléctricas, están compuestas por cuatro elementos principales, que a su vez se desglosan en diversos componentes más y que varían según la tecnología y el tipo de prótesis, pero en general y según Fernández y Gonzáles (2000), los elementos de una prótesis de manera general son como se muestran en la Figura 3 y se enlistan como sigue:
Elementos de suspensión: Mantiene la prótesis en su lugar
Elementos de control: Correas o cables que actúan y transmiten los movimientos al miembro artificial
Conos de enchufe o socket: Parte que se adapta al muñón
Articulaciones: Que reemplazan a las anatómicas
Dispositivos terminales: Son elementos que se colocan en sustitución de la mano (p.242-243).
3.2 Revelaciones de entrevistas y observaciones
Con la ayuda de entrevistas grupales e individuales, Figura 4, y la observación directa e indirecta se documentó a lo largo de dos años, información de diversos usuarios, tanto adultos como niños, a continuación, la información más relevante.

Fuente: elaboración propia.
Figura 4 Entrevistas realizadas de manera grupal e individual con usuarios adultos y niños.
3.2.1 Ergonomía
Los criterios antropométricos en las prótesis tradicionales resultaron ser pobres, particularmente en la adaptación del socket con el muñón que en el caso de los niños cambia constantemente de dimensiones a consecuencia del crecimiento acelerado propio de la edad, lo que implica que como mínimo se requieran reemplazar la prótesis de dos a tres veces al año, con el costo y esfuerzo que ello supone. En la Figura 5 se muestra el desajuste mencionado.

Fuente: elaboración propia.
Figura 5 Se aprecia la compresión en el músculo del muñón debido al desajuste dimensional del socket por crecimiento.
Otro aspecto por resaltar es la desproporción entre el dispositivo terminal y el cuerpo del niño. En muchos casos documentados, como el de la Figura 6, los infantes utilizaban ganchos terminales de uso adulto, cuyas dimensiones y peso no correspondían con su edad por lo que, al no estar acostumbrados a la desproporción en la longitud de la extremidad, afectaban el equilibrio y los desplazamientos del infante, al grado de ocasionar caídas al perder el centro de gravedad y exponerse a golpes autoinfligidos en el rostro y abdomen.

3.2.2 Múltiples visitas y largos tiempos de espera
Los procesos convencionales para la fabricación de prótesis no han evolucionado mucho en nuestro país a lo largo de los años: Tener una o varias escuelas institucionalizadas, no universitarias, profesores en el área de órtesis y prótesis en su mayoría no calificados, y egresados que no cumplen con parámetros internacionales que siguen siendo técnicos que solo surten órdenes, son factores que han hecho que México se quede estancado en este campo aunque sea un país que ofrece una increíble variedad de opciones educativas, con prestigiadas universidades y un gran número de licenciaturas, ingenierías, maestrías y doctorados (Caudillo, 2016, p. 52).
Esta situación ha mantenido la precariedad del proceso al no haber actualización constante o desarrollo tecnológico propio. Un ejemplo es que para la elaboración del socket se requiere someter al usuario por un proceso que se puede percibir como invasivo, tedioso y sucio. En la Figura 7 se muestran las etapas del proceso que comienza en la obtención de un molde mediante la colocación de vendas de yeso sobre muñón del usuario, el contacto físico durante la aplicación del agente desmoldante graso y el posterior lavado con agua tibia del área impresa son necesarios en orden de lograr los objetivos. El tiempo promedio invertido por el usuario en estas sesiones es de 1 a 2 horas, dependiendo de la habilidad y carga de trabajo del protesista. Posteriormente, la impresión obtenida se empleará como contra molde para realizar un vaciado de yeso que, tras ser detallado con lijas y resanador, terminará con una representación pétrea del muñón del paciente que debe ser humedecida y secada alternadamente por varios días. Solo entonces es posible utilizar dicho modelo como molde para realizar el socket en fibra de vidrio y resina.

Es necesario indicar que, debido a la contracción natural del yeso, así como lo artesanal del proceso y los largos periodos de tiempo que implica, es normal que el socket resultante no ajuste adecuadamente con el muñón del usuario y cualquier modificación significativa implicaría reiniciar el proceso.
En resumen, es necesario que el usuario se desplace en múltiples ocasiones y permanezca por largos periodos de tiempo si es que desea tener el mejor ajuste posible en su socket. Lo anterior demuestra la necesidad de actualizar el proceso de protetizado, no solo para la comodidad del usuario, sino para mejorar la calidad del producto y reducir el número de errores. Sin embargo, contrario a la necesidad recién expuesta: Existe un decrecimiento en el número de personas capacitadas para fabricar y adaptar extremidades artificiales, (prótesis) [sic]. Esta sorprendente aseveración, por más que resulte increíble e inadmisible, ¡ES CIERTA! [sic]. En el año 1982 cesó sus actividades la primera y única escuela, por más de 26 años, para ortesistas y protesistas. En el 2008 cerró la singular escuela, en su momento, que ofreció en un inicio la carrera de técnico superior universitario y más adelante la de licenciado en órtesis y prótesis (Vázquez, 2016, p. 1).
Sería injusto negar que en la actualidad existan esfuerzos para cambiar esta situación, ya que en algunos estados se han comenzado a instaurar programas para la formación de protesistas calificados, pese a ello: En la actualidad algunas instituciones de estados como Veracruz y Querétaro hacen grandes esfuerzos para desarrollar la carrera de protesista y ortesista pero enfrentan dificultades para encontrar profesores experimentados en ambas áreas. Esto ha entorpecido el proceso y el círculo vicioso continúa: sin protesistas capacitados no se pueden establecer escuelas, y sin escuelas no se contará con el personal capacitado que tanto requiere el país, por lo tanto, prótesis poco eficientes (Vázquez, 2016, p. 1).
3.2.3 Costos
Sobre el precio de una prótesis de miembro superior hay poca información escrita, no queda más que creer en la información que de boca en boca, afirma en ser de no menos de 100,000 pesos mexicanos, si es que se trata de adquirir por fuera de los programas de asistencia social. Según comentaron durante las entrevistas, únicamente el terminal de gancho ronda los 60,000 pesos, lo que resulta inasequible para el 60.7% de la población trabajadora ocupada entre mayo y junio del 2020, quienes perciben de uno a dos salarios mínimos de acuerdo con la Encuesta Telefónica de Ocupación y Empleo (ETOE) realizada por el Instituto Nacional de Estadística y Geografía (INEGI) (p.10). Aunado a esto: Gran número de pacientes amputados se alejan, por temor o incapacidad física, de la actividad productiva que desarrollaban antes de sufrir la pérdida de una o varias extremidades; además, con frecuencia se vuelven dependientes y evitan llevar a cabo las actividades de la vida diaria. Este solo hecho obliga a la familia a disponer de una persona, sea pariente o no, a asistir al discapacitado para asearse, alimentarse, desplazarse y distraerse, amén de que el amputado deja de ser productivo y generar ingresos para su manutención (Vázquez, 2016, p. 2).
Si bien con estas afirmaciones se busca establecer la pérdida del poder adquisitivo que presenta una familia mexicana integrada por al menos una persona con discapacidad, también hay que reconocer la inequidad económica propia del país, que vuelve inasequible por esfuerzo propio cualquier solución protésica para la mayoría de la población económicamente activa. Por otro lado, la posibilidad de convertirse en beneficiario de algún programa de asistencia social es baja: Existe gran carencia de instituciones gubernamentales responsables de la rehabilitación de los amputados. En la actualidad la Secretaría de Salud Federal dispone en el Instituto Nacional de Rehabilitación de un departamento de Órtesis y Prótesis en el cual se fabrican y adaptan alrededor de 130 prótesis al año. El Sistema para el Desarrollo Integral de la Familia [sic], siguiendo las disposiciones oficiales, ha instalado unidades básicas de rehabilitación [sic] en la mayor parte de los estados de la República, pero sólo en 11 de ellos se dispone de un laboratorio para fabricar prótesis. En dichas unidades se fabrican entre 330 y 440 prótesis al año. El Instituto Mexicano del Seguro Social y el Instituto de Seguridad y Servicios Sociales de los Trabajadores del Estado están obligados a proveer prótesis de forma exclusiva a los derechohabientes que han perdido una extremidad como consecuencia de un accidente ocurrido en su trabajo o durante su traslado. Los servicios de salud de las fuerzas armadas [sic] atienden al personal militar y naval derechohabiente, y les otorgan los servicios de rehabilitación que incluyen la fabricación y adaptación de las prótesis que requieren (Vázquez, 2016, p. 2-3).
Para un país con una población de poco más de 120 millones de habitantes (INEGI, 2020), son pocas las instituciones gubernamentales y la oferta anual que estas pueden proveer. En parte por la falta de recursos públicos que permitan aumentar la producción, por el acotado sistema de cobertura que excluye a los niños y adolescentes al no ser trabajadores activos o por la falta de profesionales capacitados que permitan la creación de nuevos centros de asistencia pública. Sea cual sea el motivo, la realidad es que la demanda supera la oferta disponible tanto en el sector privado como en el público.
En nuestro país el número de profesionales de la especialidad de órtesis y prótesis logra cubrir apenas en un 15% la recomendación de la Organización Mundial de la Salud (OMS), que indica que por cada 500 personas con discapacidad debe existir un practicante de la rama de órtesis y prótesis con nivel adecuado para atender usuarios (Caudillo, 2016). Al ser pocas las ofertas de asistencia social en el país y tanta la demanda, las personas con discapacidad deben recurrir a cualquier opción casera que les beneficie, aunque eso pueda comprometer su bienestar.
Las familias que no residen cerca de los hospitales públicos que atienden a personas amputadas y que no cuentan con los recursos necesarios para solventar gastos de traslado, hospedaje y alimentos durante el periodo de hospitalización y protetización, también quedan fuera del programa de beneficio. Lo anterior sin considerar los gastos de terapia física y psicológica que el usuario debe tomar antes, durante y después de recibir la prótesis, necesarios para obtener una rehabilitación integral.
3.2.4 Estética y percepción social
Durante las entrevistas y las observaciones indirectas se identificó un comportamiento común entre los diferentes participantes de la investigación, y consiste en la necesidad de tratar de ocultar su discapacidad del mundo que los rodea, algunos con movimientos aparentemente involuntarios para ocultar su brazo, tal como se muestra en la Figura 8.

Fuente: elaboración propia.
Figura 8 Usuario realiza el acto consciente de ocultar su muñón detrás de su espalda.
Cabe mencionar que esta situación se pudo observar con mayor frecuencia en personas con ausencia de miembro causada por amputación a partir de la adolescencia, por sobre las personas con ausencia de miembro desde el nacimiento o por amputación en los primeros años de vida, quienes dan la impresión de sentirse más cómodos con su aspecto físico y por tanto muestran comportamientos más naturales.
Algunos ejemplos documentados son el usuario de la Figura 9, que utiliza vendajes para disimular el muñón a pesar de no haber una razón medica que lo justifique, aquellos que utilizan ropa holgada como camisas de manga larga y chamarras aun cuando el clima exterior sea cálido o como aquél que se presentó a la entrevista usando una prótesis debajo de su sudadera, a pesar de que esta ya no era funcional por falta de mantenimiento, véase Figura 10.

Fuente: elaboración propia.
Figura 10 Izquierda, usuario esconde amputación de dedos bajo su ropa. Derecha, usuario disimula su discapacidad con prótesis descompuesta debajo de su ropa.
Al ser cuestionados al respecto afirmaban sentir incomodidad de mostrar su discapacidad en público debido a la forma como las personas los observan en la calle, sin mala intención, pero con curiosidad, lástima o inquietud.
Durante el proceso de protetización es importante que sean los usuarios los decididos a buscar opciones protésicas, de esta forma, a pesar de la incomodidad que sienten por la mirada de las personas a su alrededor, las utilizarán y se beneficiarán de ellas.
Smith (2006), en su artículo “Como se adaptan los niños a la pérdida de extremidades” de la revista inMotion, aclara que: Los adolescentes que han perdido alguna extremidad tienen los mismos problemas de “madurez” que el resto, y algunos más. La pérdida de una extremidad puede hacer más difícil esta etapa ya que los adolescentes no quieren ser diferentes a sus amigos. Pueden intentar ocultar su dismetría. Por ejemplo, los adolescentes sin extremidad inferior quizás no quieran nadar o realizar actividades que expongan sus piernas. Más difícil les resulta ocultar la falta de una extremidad superior porque sus manos son muy fáciles de ver. Los adolescentes tienden a ocultar menos la ausencia de extremidades una vez que sienten que son del agrado de sus amigos. (p. 5).
Es necesario pues, que la estética de la prótesis vaya enfocada no solo en agradar al usuario, sino además a las personas que lo rodean para convertir la atención negativa en atención positiva, y trasladar una inseguridad en fortaleza.
3.2.5 Necesidad que debe ser cubierta a toda costa
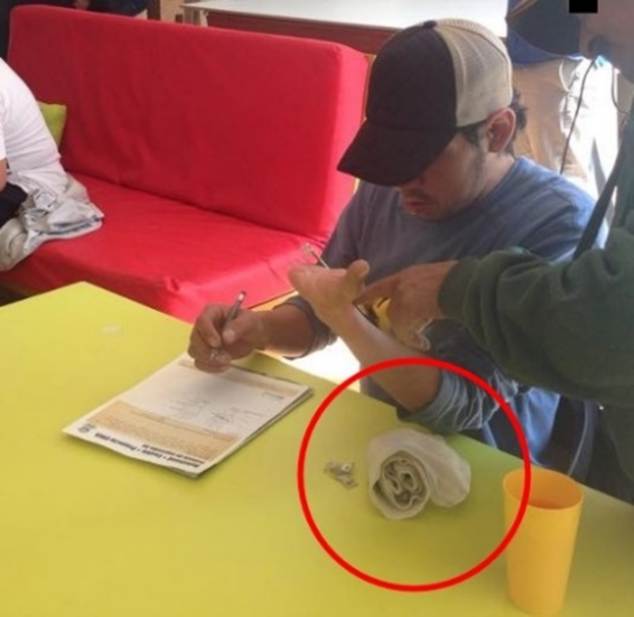
Otro fenómeno interesante de mencionar es la cantidad de personas que, ante la imposibilidad de costearse una prótesis convencional, mostraron inquietud por fabricarse una ellos mismos. En la Figura 11 y Figura 12 se muestra como el usuario o alguno de sus familiares, valiéndose de diversos materiales, y sin experiencia alguna en el tema, se esforzaron para materializar lo que para ellos sería una solución suficiente a sus necesidades. Si bien, dichas propuestas no solían terminar como se esperaba y tanto su funcionalidad como estética era prácticamente nula, si denotan que para el usuario una prótesis no es un lujo, sino una necesidad que requiere ser cubierta sin importar como.


3.3 Levantamiento antropométrico de usuarios
Posterior a la recopilación de información cualitativa, fue necesario determinar la mejor manera de documentar los datos cuantitativos del usuario, específicamente, las dimensiones antropométricas del brazo. Para lograrlo, se experimentó con dos posibles opciones usadas simultáneamente, en orden de identificar la que proporcione mayor precisión y requiera menor tiempo.
3.3.1 Toma manual de medidas
El levantamiento manual de medidas antropométricas se llevó a cabo con vernier milimétrico y cinta métrica.
El proceso fue tardado y demandaba paciencia por parte del usuario, al que se tenía que manipular manualmente por tiempos prolongados de tiempo, sin embargo, los resultados fueron buenos en cuanto a precisión solamente en los muñones con formas regulares que incluso facilitaban la elaboración del diagrama de referencia como los que se muestran en la Figura 13. En aquellos con forma irregular, como los que se ejemplifican a través de la Figura 14, se requirió una solución digital.

Fuente: elaboración propia.
Figura 13 Levantamiento antropométrico manual de muñones con forma regular.

3.3.2 Toma digital de medidas con escáner 3D
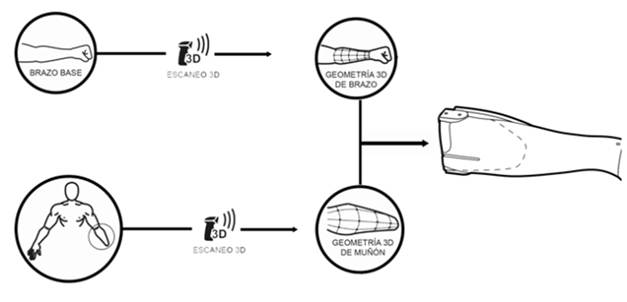
Un escáner 3D es un dispositivo que a través de diferentes cámaras analiza un objeto o una escena, registra la geometría y la analiza en una nube de puntos digitales para obtener una representación virtual del mismo. Existe una gran variedad de escáneres en el mercado, para esta investigación se utilizó un Kinect para Xbox One y un software especializado para conseguir capturar modelos tridimensionales del usuario y específicamente aquellos con muñón de forma irregular.
El proceso que se ejemplifica a través de la Figura 15, demostró ser sencillo y rápido, no superando los 20 minutos para realizar al menos cuatro capturas en diferentes posiciones. Además, demostró ser un proceso poco invasivo y cómodo para el usuario al limitar el contacto y proporcionar la experiencia de ver como aparecía una representación fiel del usuario frente a sus ojos.

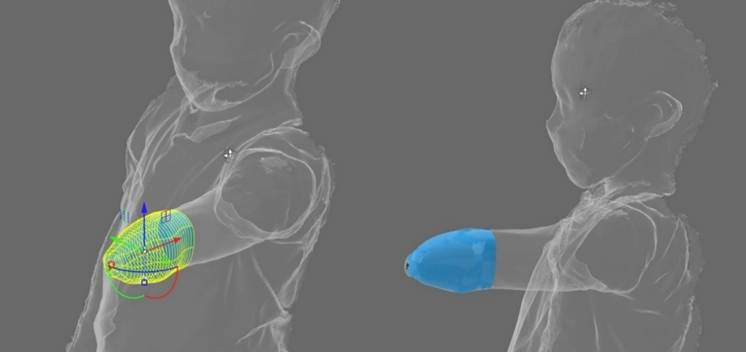
Es necesario también el escaneo del miembro superior íntegro para que, al momento de modelar el socket con las dimensiones de volumen y extensión de la prótesis, se mantenga en la medida de lo posible la proporción entre ambos y de esta manera facilitar la función y coordinación bimanual, Figura 16.
3.3.3 Selección del mejor proceso
Después de utilizar ambos métodos de levantamiento antropométrico, el manual y el digital, se hizo evidente que el escaneo 3D representa una opción más rápida, cómoda y que se adapta mejor a los diferentes tipos de muñón que pueden llegar a presentar los usuarios.
Sin embargo, por sí solo no presenta la certidumbre de poder trabajar con la mayor precisión posible, un modelo digital siempre podrá ser sometido a modificaciones accidentales o errores del programa que alteren la geometría o las proporciones finales del modelo tridimensional. Por lo anterior se recomienda utilizar ambos métodos, de tal manera que se complementen y se confirme que se ha trabajado con la información correcta.
3.4 Diseño de propuestas y prototipado rápido
La información recopilada a través de las entrevistas, en conjunto con las medidas obtenidas en los levantamientos antropométricos, proporcionaron datos suficientes para realizar algunas propuestas, mismas que a través de la experimentación aportaron más datos acerca de la función de las prótesis y la configuración ideal que debe poseer el diseño. A continuación, se muestran en secuencia los modelos fabricados y las contribuciones que hicieron para llegar a la propuesta final.
3.4.1 Prototipado rápido de socket, elementos de control y suspensión
El diseño del socket, los elementos de suspensión y control son dependientes unos de otros. Se empleó el socket de diseño estándar, también llamado Standard Hinged Socket, mismo que requiere el uso de arnés o brazalete adaptado al antebrazo que asegure la suspensión del socket en su posición, pero permite aprovechar el movimiento mecánico del codo como activador del dispositivo terminal, y cuyo ejercicio constante mantiene el miembro del usuario en buena condición física, véase Figura 17.
Fuente: elaboración propia.
Figura 17 Socket de diseño estándar, elementos de control y suspensión final.
Se analizaron las ventajas y desventajas de las diferentes opciones de socket. En México, el sistema más utilizado para amputaciones transradiales, o debajo del codo, es el tipo Müenster; este fue diseñado para sujetar la extremidad entre el codo y antebrazo, sin embargo, el enganche por presión al codo también restringe el movimiento de flexión y extensión de este, impidiendo que se aproveche la fuerza generada por el mismo como elemento de control para abrir o cerrar el dispositivo terminal, o mano. Otras opciones de control son las mecánicas que se controlan a través del movimiento del hombro y la extensión del brazo, con el inconveniente de que promueven la disminución en la altura del hombro genera actitudes posturales anómalas que, a corto plazo pueden generar dolores o lesiones, y tortícolis y escoliosis a largo plazo.
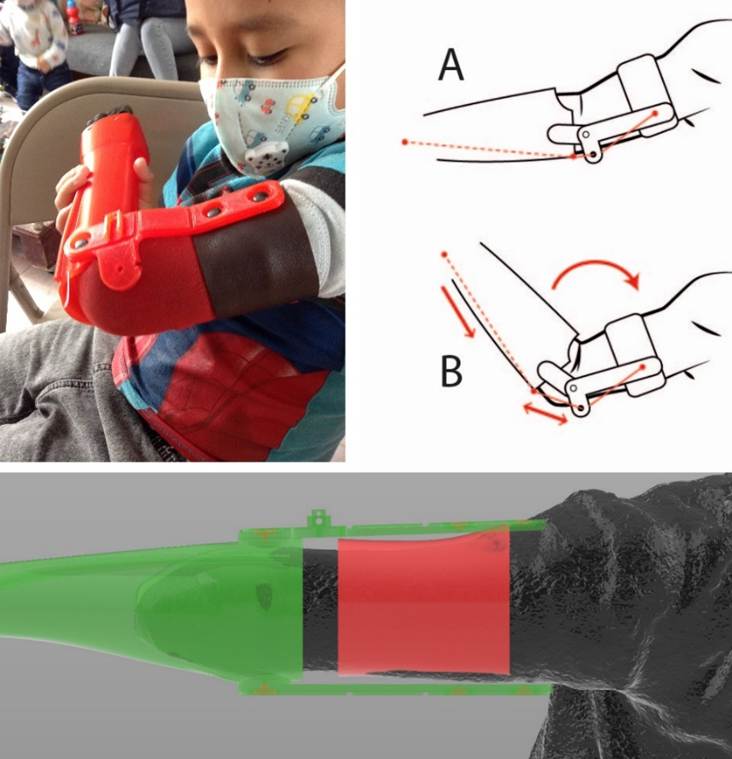
En orden de conseguir el mejor acople del socket con el muñón, se utilizó como guía el modelo digital del muñón obtenida con el escaneo 3D en combinación con el modelo digital de un brazo promedio previamente obtenido de igual manera, mediante escaneo 3D. Combinando ambos modelos se consiguió fabricar efectivamente el socket y la interfaz de la propuesta protésica en una sola pieza mediante manufactura aditiva tal como se muestra en la Figura 18.
3.4.2 Prototipado rápido de dispositivo terminal
El dispositivo terminal, es probablemente el elemento más importante de todo el proyecto, es este el que define el tipo de prensión manual, patrón mediante el cual se accionan las falanges para sostener o manipular objetos, y el elemento que estará expuesto a la vista de las personas, por lo tanto, el responsable de que el usuario sea percibido positiva o negativamente por los que lo rodean. Es por lo que se decidió trabajar imitando lo mejor posible la morfología de la mano humana y probar con diferentes tipos de prensión manual para identificar la que aporte mayores beneficios.
A continuación, se exponen de manera breve algunos de los modelos resultantes durante el prototipado rápido, y los descubrimientos más relevantes que guiaron el proceso de diseño.
El primer modelo, Figura 19, se realizó a partir del modelo digital de una mano humana, obtenida de un escaneo 3D, dicho modelo fue suavizado en sus detalles, agregado muescas que permitan la flexión de las falanges y modificada la longitud del dedo pulgar para facilitar la prensión pulgar-índice - medio. Esta prueba se materializó en una pieza completa con impresora 3D y material flexible TPU. El resultado fue una impresión que demoró 10 horas, y el acabado fue sucio y desprolijo.

Se utilizaron cerca de 300 gramos de material, lo cual elevó el costo de manufactura ya que kilo de TPU ronda los 900 pesos mexicanos. La impresión 3D requiere superficies planas para adherirse a la cama de impresión y agregar material de soporte cuando se impriman secciones que desafían la gravedad. Esto sumado a que el TPU al ser un material extremadamente flexible, requiere reducir la velocidad de impresión al 20%, no realiza muy buenos soportes. La flexión de las articulaciones se realizó con éxito, pero se rompieron rápidamente por la mala calidad y orientación de la pieza.
En orden de corregir los errores anteriores se buscó, como se muestra a través de la Figura 20, simplificar la forma de la mano para lograr impresiones uniformes, pero manteniendo el aspecto orgánico. Así mismo, para reducir el tiempo y costo de impresión, se decidió únicamente imprimir en material flexible TPU los dedos que requieren movilidad y parte de la palma para proporcionar un área plana que pueda adherirse a la cama de la impresora 3D y así evitar el uso de material de soporte. El resto de la palma se imprimió en material PLA, que es más económico y rápido de emplear.

Fuente: elaboración propia.
Figura 20 Modelo de pieza con palma impresa en PLA y falanges impresas en TPU.
Durante las pruebas se descubrió que la orientación en que se fabricaron las falanges, con las vetas en la misma dirección de doblez de los dedos, debilitó la unión entre las articulaciones flexibles, por lo que se rompieron con muy poco tiempo de uso, ver Figura 21.

Fuente: elaboración propia.
Figura 21 Se tiene poca resistencia mecánica al flexionar cuando la veta de impresión converge con el eje de doblez de la articulación.
Para corregir el desperfecto, como se puede apreciar en la Figura 22, el corte en la pieza de la zona palmar se realizó prominentemente en diagonal con respecto a las articulaciones flexibles, de esta manera las vetas de impresión y las articulaciones se complementaban para aumentar la resistencia, de momento se mostraba mejoría por lo que se ensambló y se montaron los cordones para someterla a prueba con el usuario.

Fuente: elaboración propia.
Figura 22 Reorientación del corte de la palma para aumentar la resistencia del material.
El mecanismo funciona sujetando un cordón desde la punta de los dedos o el punto distal de las falanges de la mano, atravesando la palma a través de conductos internos que terminan al interior de la muñeca o la zona de las apófisis estiloides del radio y el cúbito. En la Figura 23 se puede apreciar como al tensar los cordones se realiza la flexión de los dedos, y al relajarlos, la extensión.
Fuente: elaboración propia.
Figura 23 Detalle del mecanismo de prensión manual por tensión de cordones.
Las pruebas que se realizaron con el usuario demostraron que, si bien la flexión se lograba satisfactoriamente, la resistencia del material y las articulaciones era únicamente aparente, y terminaba por romperse por la debilidad de las vetas, ver Figura 24.

Para corregir definitivamente este problema se replanteó el diseño de la palma. En esta ocasión se tomó la decisión de separar por completo las falanges de la palma, fabricarlos mediante impresión 3D con material TPU y ahora orientando las vetas a lo largo de todo el dedo. De esta forma se eliminaron los puntos de quiebre a lo largo de las falanges.
La palma se fabricó con material rígido de PLA y se le agregaron orificios donde los dedos flexibles pudieran ser insertados y fijados con tornillos individualmente, ver Figura 25.

Fuente: elaboración propia.
Figura 25 Prototipo con falanges impresas y unidas individualmente a la zona palmar de la mano.
El planteamiento en esta ocasión fue correcto, sin embargo, las proporciones y la estética del modelo eran disformes, por lo que se continuó trabajando en una propuesta mejor definida.
En esta ocasión, respetando las especificaciones técnicas y formales previamente definidas, se elaboró una propuesta que pudiera ser probada en nuestro usuario meta, los niños. Para optimizar el tiempo y la calidad del acabado de las piezas impresas en 3D, se redujeron drásticamente las formas orgánicas de los dedos y palma. Con el sacrificio de la apariencia marcadamente biomimética se ganó resistencia y velocidad en el modelo.
El diseño de la Figura 26, en conjunto con el socket y los elementos de control se entregaron a niños que pudieran probarlo por algunos meses.

3.4.3 Calibración de fuerza de activación
Tras algunos meses bajo pruebas, las prótesis demostraron tener un efecto positivo para el usuario y las personas que lo rodean. A pesar de esto, se identificó un problema significativo de funcionalidad, y es que, si bien los usuarios de mayor edad con extremidades mejor desarrolladas eran capaces de activar el mecanismo de flexión sin dificultad, no sucedía lo mismo con los usuarios más jóvenes y con muñones menos desarrollados.
Al inicio, como se ve en la Figura 27, era evidente que realizaban gran esfuerzo para lograr flexionar el codo, pero se esperaba que con el uso constante las articulaciones se volvieran suaves y fáciles de flexionar, sin embargo, ese no fue el caso y terminó por desincentivar el uso de la prótesis.

Fuente: elaboración propia.
Figura 27 Pruebas de dispositivo terminal y problemas de flexión de dedos.
Se realizaron diversas pruebas y un análisis detallado de la interrelación de los componentes que integran el sistema flexor y la forma como cada uno afecta o contribuye a la correcta flexión de los dedos. Los cambios principales se presentan a continuación.
Respecto a los cordones se identificó que el índice de elasticidad del cordón en la segunda falange, dedo índice, afecta notablemente la realización de la flexión, el cordón de nylon tradicional tuvo que ser reemplazado por cordón especial para pesca debido a que presenta índices de deformación inferiores y mayor resistencia mecánica ante la tensión y de esta manera aprovechar al máximo la transferencia del esfuerzo desde el codo a la punta de los dedos, sin sufrir pérdidas por deformaciones mecánicas.
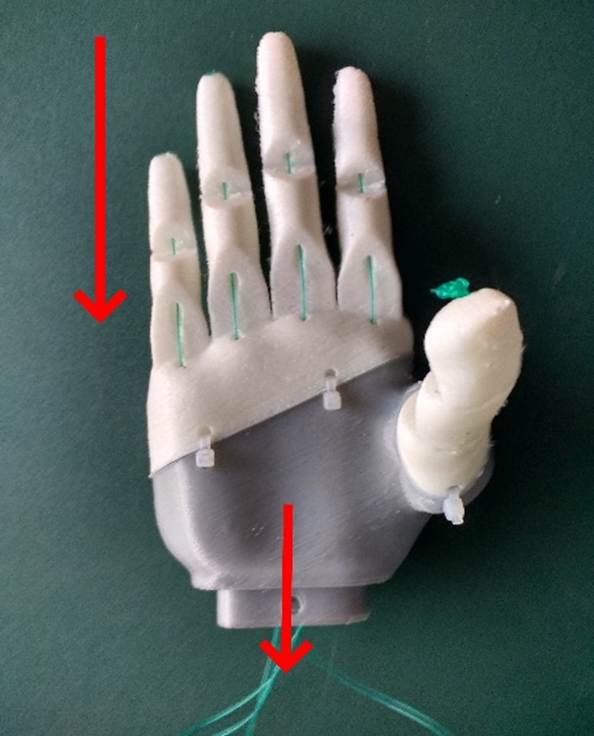
El segundo cambio se llevó a cabo luego de la identificación de la fricción que genera cada uno de los cordones a través de los conductos de la palma, bajo la premisa de “a menor cantidad de tensores, menor será el índice de fricción y por consiguiente menor esfuerzo requerido durante la flexión”, se redujo el número de cordones de cinco a tres, como se ve en la Figura 28, uniendo los dedos índice-medio y meñique con el anular, el pulgar permanece independiente.

Fuente: elaboración propia.
Figura 28 Combinación de dedos para reducir número de cordones tensores.
De esta manera se obtuvo una prótesis que estéticamente aparenta tener cinco dedos, pero mecánicamente emplea solo tres cordones tensores, véase Figura 29.

La tercera modificación se realizó para disminuir la memoria del TPU, es decir, para eliminar la inercia del material para oponerse a la fuerza generada por el cordón.
Al igual que al tratar de empujar un objeto pesado, el mayor esfuerzo se realiza al inicio de la marcha, una vez que el objeto ha comenzado a moverse se necesita menos energía para mantenerlo de esta forma. La solución planteada ante este problema, Figura 30, implicó someter los dedos flexibles a una fuente de calor constante hasta llegar al estado moldeable para pre doblar las articulaciones, con esto se desplaza el centro de gravedad de la pieza y favorece la flexión natural.

A partir de este punto se realizaron diferentes modelos con variaciones en la longitud de los dedos, posición de las articulaciones y del dedo pulgar, revisar Figura 31, cada configuración favorecía un tipo distinto de prensión manual, pero no era posible conseguir la prensión fina, necesaria para manipular objetos pequeños, sólo se sostenían por periodos breves, Figura 32.

Fuente: elaboración propia.
Figura 31 Modelos con variaciones en posición de articulaciones y dedo pulgar.

Una de las pruebas sugirió que parte del problema lo ocasionaba la excesiva e innecesaria flexibilidad del dedo pulgar. Se puede observar en la Figura 33 cómo la pieza colapsa sobre sí mismo, dispersando la fuerza de tensión en otras direcciones, perdiendo por consecuencia, la capacidad de presionar con fuerza objetos pequeños.

Fuente: elaboración propia.
Figura 33 Pulgar cediendo fuerza de prensión ante la oposición de los otros dos tensores.
En la Figura 34 se observa como el dedo pulgar flexible fue reemplazado por otro sin capacidad flexora y se realizó una prueba rápida que verifico que la flexibilidad y movilidad del dedo pulgar poco aportaba durante las prensiones manuales de la prótesis y por el contrario al eliminar este atributo se favorecía la prensión fina entre el dedo pulgar y el índice.

Fuente: elaboración propia.
Figura 34 Pulgar rígido que si se opone al resto de los dedos para aumentar fuerza de prensión.
Bajo esta línea funcional, la prótesis paso de utilizar tres a únicamente dos cordones necesarios para la realización de la flexión, lo que redujo aún más la fricción en los conductos y por ende la energía necesaria para activar el mecanismo flexor. Así mismo, en la Figura 35, se puede apreciar que se trabajaron los ensambles del nuevo dedo pulgar y la estética final de la palma con el objetivo de conseguir un objeto atractivo pero que proporciona buena amplitud de prensión.

4. Discusión de resultados
El diseño de productos siempre ha hecho énfasis en el carácter recursivo por sobre la seriación del proceso. Un buen diseño debe prestarse para la mejora continua y reconocer que un solo producto rara vez constituye la solución única y definitiva a problemáticas complejas. Los proyectos relacionados a temáticas de discapacidad no son la excepción, el diseño presentado a lo largo de este artículo es el coronamiento de la investigación realizada durante más de dos años.
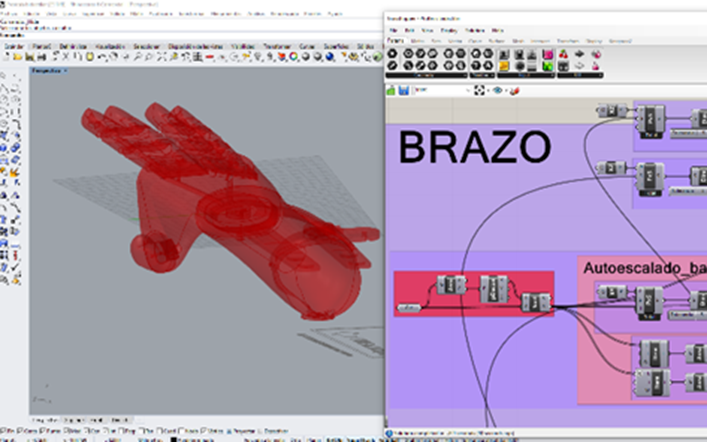
La propuesta final es una prótesis mecánica para miembro superior a nivel transradial o debajo de codo. El diseño y modelado 3D de la prótesis se realizó en el programa Rhinoceros 3D con ayuda del complemento Grasshopper para diseño paramétrico, lo que genera una ventaja al poder ser aplicado a diferentes usuarios, tal como se muestra en la Figura 36, únicamente variando parámetros determinados, como la geometría del muñón, longitud de brazo y antebrazo, o si se trata de la extremidad izquierda o derecha.
Cabe aclarar que existe muy poca información de consulta disponible sobre una propuesta tan especifica como la aquí presentada, gran parte de la información se obtuvo directamente de experiencias con usuarios, prototipado rápido, retroalimentación y ajustes. Según las necesidades que el usuario presentaba, se realizaban las adecuaciones.
4.1 Resultados del diseño y componentes
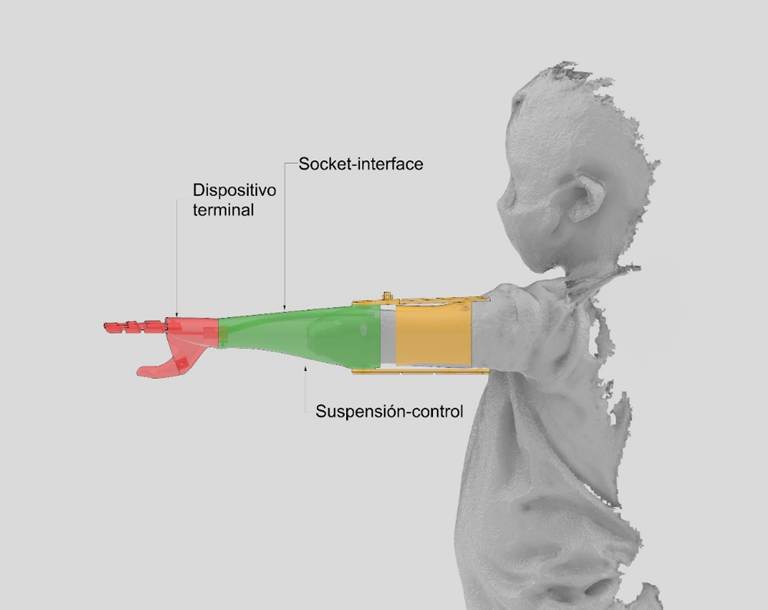
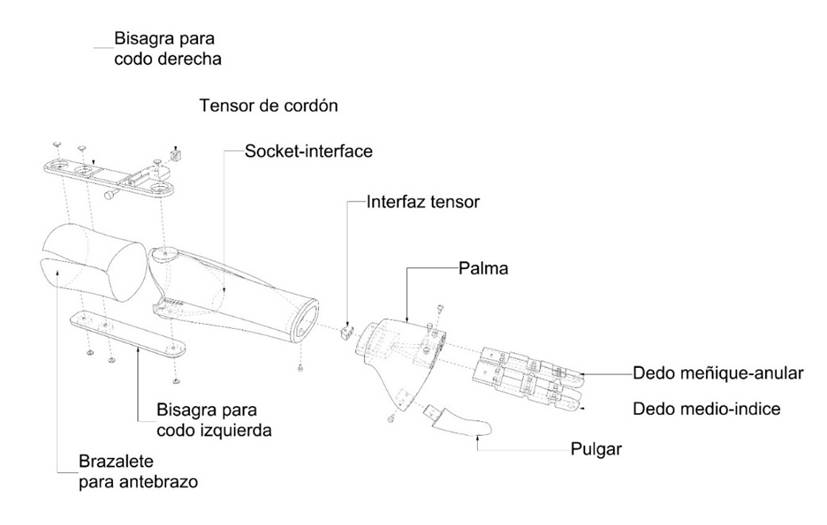
Los componentes de la propuesta se dividen en tres secciones principales: dispositivo terminal, socket-interface y elemento de suspensión-control, ver Figura 37. Estos a su vez se desglosan en componentes individuales dando un total 10 piezas estructurales, seis remaches y cuatro tornillos milimétricos.
A continuación, el desglose especifico de componentes con el proceso y material de fabricación, ver Figura 38.
Fuente: elaboración propia.
Figura 38 Desglose específico de componentes con el proceso y material de fabricación.
Dispositivo terminal
-Dedo flexible meñique-anular (TPU)
-Dedo flexible medio-índice (TPU)
-Dedo flexible pulgar (TPU)
-Palma (PLA/PETG)
-Interfaz tensor (PLA/PETG)
-Tres tornillos milimétricos
Socket-interface (PLA/PETG)
Elemento de suspensión-control
4.2 Resultados del proceso de fabricación
El proceso inicia con el levantamiento antropométrico a través del escáner 3D para obtener una representación digital del cuerpo del usuario y que, como anteriormente se menciona, se complementa con la toma manual de las dimensiones generales del muñón para usar como referencia en el programa digital. A partir del modelo 3D del usuario, se aísla la geometría correspondiente al muñón para introducirlo como parámetro determinado y comenzar a alimentar al programa. Desde este momento, automáticamente se harán los ajustes pertinentes en el modelo 3D, entonces el programa arrojará el diseño de prótesis idóneo para dicho usuario. Finalmente, bastará que el operador comience la fabricación de las piezas y una vez concluido, realice el ensamble, Figura 39.

El proceso de fabricación se realiza casi en su totalidad por manufactura aditiva, específicamente el dispositivo terminal compuesto por el socket, la interface y parte de los elementos de control. Los elementos sobrantes de suspensión se componen de piel animal y remaches comunes de aluminio para mejorar la sensación táctil del usuario y facilitar el mantenimiento respectivamente. Así mismo, los elementos de control restantes emplean cordón de nylon para pesca y cuatro tornillos milimétricos de 3 mm.
Respecto al tiempo de fabricación, el proceso de impresión 3D presentó variación de tiempo dependiendo las dimensiones de la prótesis a materializar. De las que se han fabricado hasta ahora, la más pequeña para un niño de 8 años edad, el tiempo total de impresión fue de 14 horas; por otra parte, la prótesis que más tiempo requirió fue para un niño de 11 años, y demoró poco menos de 17 horas de impresión continua, Figura 40.
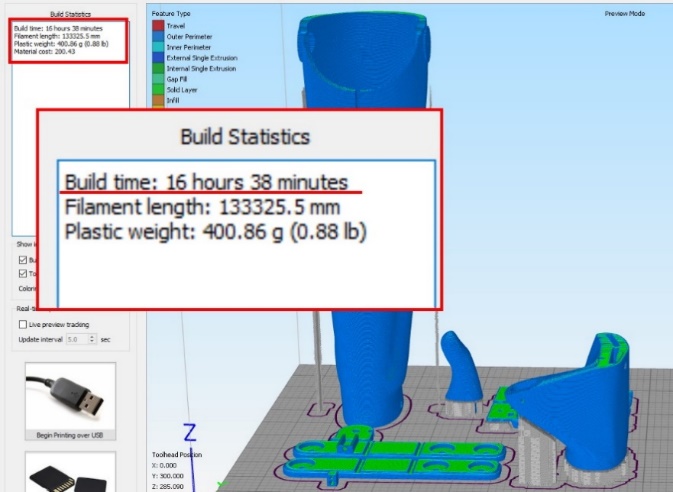
Otra ventaja de la manufactura aditiva es que cuando la máquina se encuentra bien calibrada, no requiere de supervisión humana constante por lo que se puede dejar trabajando por las noches y en la mañana continuar con el siguiente paso, Figura 41.

Si se suma el tiempo anteriormente mencionado a los 30 minutos que se requieren para realizar el levantamiento antropométrico inicial, más las aproximadamente 2 horas invertidas en reparar y limpiar el modelo digital del muñón para introducirlo en el programa generador de la prótesis, podemos afirmar que, si se realiza el levantamiento antropométrico por la mañana, al día siguiente es posible tener fabricada la nueva prótesis para que, si todo ajusta adecuadamente, el usuario pueda llevársela. En palabras sencillas, esta propuesta permite que, en un escenario normal, la entrega de la prótesis se lleve a cabo en menos de 48 horas luego de la primera visita. Esta afirmación podría parecer hipotética o una estimación conservadora si no fuera porque en uno de los casos con que se realizaron pruebas, esta teoría logró comprobarse.
4.3 Validación de la propuesta
El objetivo planteado al inicio de este proyecto es el diseño de una prótesis ergonómica, segura y asequible. Con vistas a validar su cumplimiento, se seleccionó como usuarios a 3 infantes con diferencias en género, edad y patología en su muñón, dos compartiendo edad siendo hombre y mujer, representando el percentil 5 y 50 respectivamente, siendo el percentil 50 nuestro usuario de control, y uno como el percentil 95 masculino, siendo el mayor. Para fines prácticos serán identificados bajo los siguientes prefijos:
Usuario uno: Infante varón de 8 años, estudiante, presenta ausencia de miembro izquierdo en tercio proximal del brazo causada por mal formación gestacional. La longitud del muñón es inferior a la recomendada para el uso de prótesis, mucho musculo con pocos restos óseos, Figura 42.
Usuario dos: Infante femenina con 8 años, estudiante, presenta ausencia de miembro izquierdo en tercio medio del brazo causada por mal formación gestacional, el muñón tiene poco musculo y suficiente hueso, aunque con geometría anómala, Figura 43.
Usuario tres. Puberto varón de 11 años, campesino, presenta desarticulación de muñeca por amputación traumática a causa de accidente doméstico, la longitud del muñón es superior a la recomendada para el uso de prótesis, cuenta con un remanente atrofiado de muñeca, Figura 44.



El proceso de validación se desarrolló en un lapso de 6 meses, con pruebas documentadas en observación directa durante la reunión donde los usuarios probaron el dispositivo por primera vez. Seguido de la observación indirecta, donde se les permitió llevarse la prótesis a sus casas y usarla con normalidad bajo la petición a los padres de enviar actualizaciones mensuales donde comenten las impresiones positivas y negativas que han podido tener sus hijos, acompañado de fotografía y video.
4.4 Impresiones relevantes de la Observación directa
La impresión inicial tanto de los niños receptores como de sus familiares es positiva, externan agradecimiento y satisfacción por ver materializada una necesidad en tan poco tiempo.
En dos de los casos el proceso completo se llevó a cabo en el lapso de una semana y en el caso de la fémina, se realizó en un mismo fin de semana.
Los prototipos demostraron adaptarse bien a los diferentes tipos de usuarios sin importar las marcadas diferencias morfológicas de sus muñones.
Dos de los tres usuarios lograron activar la prótesis sin dificultad en el primer intento, uno presento problemas atribuibles a la poca longitud de muñón útil que presentaba, sin embargo, se corrigió en el momento.
En la Figura 45 se muestran las pruebas de prensión fina realizadas con diferentes objetos pequeños, si bien fue necesario practicar en un par de ocasiones, pronto lograron adaptarse al funcionamiento de la prótesis para poder asir objetos grandes y pequeños.

4.5 Costos para el usuario
El costo de fabricación de la prótesis se calcula sobre el tiempo de trabajo de las impresoras, gasto energético, la cantidad de materia prima necesaria, la supervisión de las máquinas y la mano de obra necesaria, la cual es mínima, siendo apenas un 20% del total del proceso. Según estas estimaciones el costo de producción ronda los 4,000 pesos mexicanos, con la posibilidad de poderse reducir anexando más equipos y adquiriendo materia prima por volumen.
Se puede comparar este precio con el de su homólogo convencional, la prótesis de gancho que otorga el Instituto Nacional de Rehabilitación en la Ciudad de México. Que según informan los padres del usuario uno, maneja un sistema de cobro que varía según el nivel socioeconómico en que sean clasificados: Al principio nosotros éramos nivel 1, duramos dos años así, y nos cobraban $700 a $800 pesos mexicanos por prótesis [sic] pero después cambio [sic] de director y ya no tenían el material y lo teníamos que conseguir por fuera, nos cambiaron de nivel también y ya las prótesis nos costaban $3,500 a $5,000 pero con el gancho de adulto y el gancho de niño no lo tenían [sic] pero nos lo conseguían en $60, 000 (E. Ricardez, comunicación personal, 09 de octubre de 2020).
El adecuado servicio de mantenimiento en las prótesis es un factor que igual genera un costo, en especial en los niños que se encuentran en la edad de mayor desarrollo, ya que será necesario reemplazar el socket conforme al crecimiento del infante. La periodicidad con que esto se realice dependerá de la morfología del muñón y velocidad de crecimiento individual. Pudiendo, según experiencias del usuario uno, llegar a requerir cambios hasta 3 veces en un año.
Dependiendo que tanto le creciera el muñón al principio era cada 4 meses después cada 6 meses [sic] pero solo era el socket (E. Ricardez, comunicación personal, 09 de octubre de 2020).
4.5.1 Impresiones relevantes de la Observación indirecta
La entrega de los dispositivos se realizó el 12 de septiembre del 2020. A partir de esta fecha se enlistan los comentarios y observaciones relevantes que nos compartieron los padres de los usuarios y que permitieron retroalimentar la propuesta en la Tabla 1.
Tabla 1 Registro de observación indirecta.
| Reporte de hechos | Comentarios de autor | |
|---|---|---|
| Usuario 1 | Se siente un poco incómodo al usarla porque se le sigue saliendo el muñón. Sin embargo [sic] si le funciona [sic] pero tiene que estar acomodándosela cada vez que la quiere utilizarla (E. Ricardez, comunicación personal, 9 de octubre de 2020), Figura 46. | La corta longitud del muñón y la falta de soporte ósea impiden que el socket se mantenga en posición. El uso de correa auxiliar o el cambio de sistema de socket serían necesarios para este tipo de casos. |
| El día de ayer le rompió un dedo a la prótesis mientras jugaba (E. Ricardez, comunicación personal, 9 de noviembre de 2020), Figura 47. | La pieza se fracturó luego de dos meses de juego intenso, el reemplazo del pulgar roto fue rápida y económica, se ajustó el diseño para reforzar ese punto de quiebre. | |
| Usuario 2 | La usa en periodos cortos durante la actividad académica y ocasionalmente para actividades de la vida diaria, esta semana comprobamos que manejar la bicicleta resulta más cómodo por el alcance de los miembros y corrección en postura. Con la prótesis de gancho, esto era complicado para ella (E. Ricardez, comunicación personal, 21 de septiembre de 2020), Figura 48. | La simetría visual y el equilibrio mejoran. El sistema de prensión manual asegura el agarre al manubrio. |
| Tengo algunas fotos que tomé con la prótesis sobre varias actividades que estábamos probando. Acerca de la manipulación de una pistola de dardos de esponja, “... para precisión en puntería. Pero la pistola está algo pesada. Para tiempos prolongados es muy cansado”. (Por el mismo peso de la pistola) [sic]. Respecto al uso de un arco, está [sic] actividad era muy difícil para ella. Con prótesis de gancho no. Sin prótesis no tiene el alcance... Solo que cuando la flecha sale. No alcanza a detener el arco y se le cae” (E. Ricardez, comunicación personal, 3 de noviembre de 2020), Figura 49. | A pesar de soportar estructuralmente cargas pesadas, el efecto palanca en el muñón termina cansando al usuario. Se soluciona con terapia de rehabilitación. | |
| Esta semana fue al INR a revisiones de rutina. En honor a la verdad la prótesis de gancho la usó muy poco. -tiene sus temporada- la nueva se la última se la dieron en septiembre - octubre aproximadamente. Y esta semana nos dimos cuenta de que ya no le queda. No así "la roja" como la identificamos nosotros. Por suerte ese día llevó ambas prótesis al hospital. Las opiniones de la ortopediatra tratante y de los ingenieros del área de órtesis y prótesis fueron positivos. Que esta [sic] genial que tenga ambas, hicieron pruebas y ella hizo algunos ejercicios y pudo enlistar las diferencias de una y otra (ella me lo contó ya que yo no la pude acompañar) [sic]. La roja le queda si, le queda bien. Creo que has hecho un gran trabajo. (E. Ricardez, comunicación personal, 11 de marzo del 2021). | El usuario realiza muchos de sus juicios de valor comparando la prótesis convencional de gancho contra la propuesta que se le otorgó, pero finalmente reconoce que ambas tienen funciones diferentes y deben ser empleadas según el contexto. | |
| Usuario 3 | La utiliza unas 3 veces por semana, no muy seguido porque le es incómoda para trabajar en el campo, como anda en el monte siente que le estorba más porque piensa que la va a descomponer (E. Ricardez, comunicación personal, 18 de diciembre de 2020). | Mantener contacto con el usuario es complicado porque se localiza en una zona rural sin muchos medios de comunicación. El usuario reconoce la prótesis como un elemento de uso cotidiano, no como un elemento para trabajo pesado. |
| La utiliza para tareas cotidianas. Para la casa y tomar agua si la usa [sic] pero como él es más de estar en el campo, hace cosas más rudas y piensa que si se la lleva siente que la va a romper o llenar de tierra. [sic] (E. Ricardez, comunicación personal, 15 de febrero de 2021). | Dentro del contexto hogareño la prótesis le es funcional, ya que se apoya en ella para realizar tareas cotidianas. Un factor importante en la generación de rechazo es la morfología del muñón, la longitud excesiva obliga a mantener cubierta por el socket una mayor porción de piel, lo que en actividades exteriores provoca sudoración e incomodidad al entrar en contacto con polvo y tierra. |
Fuente: elaboración propia.




5 Conclusiones
En nuestro país el contexto social y económico de las personas con discapacidad reduce el alcance que las prótesis mioeléctricas pueden llegar a tener, el salario mínimo y las actividades que los usuarios desempeñan comprometen la posibilidad de adquirir y mantener estos dispositivos sin el apoyo de la asistencia social, lo cual al final los orilla a la dependencia en las instituciones. Por lo que el desarrollo de prótesis mecánicas que puedan fabricarse y repararse a costos cada vez menores debería ser el objetivo principal de la investigación. Volver el producto tan accesible y económico como comprarse un par de zapatos.
La decisión de incorporar herramientas tecnológicas modernas, como el uso de programas CAD, manufactura aditiva y escaneo 3D logró reducir el tiempo de protetización significativamente con respecto a los procesos homólogos convencionales en México. El escáner 3D y la manufactura aditiva son herramientas que aportan mucho valor al proceso de protetización tanto para el usuario, al reducir los tiempos y desplazamientos que debe invertir en las consultas, como al protesista, que incrementa su precisión y reduce la mano de obra invertida por proyecto. La resistencia del ramo protésico ortopédico a incorporar estas herramientas contrasta con su homólogo del ramo protésico dental que desde hace tiempo se ha visto beneficiado.
La propuesta de prótesis de miembro superior para nivel transradial ha recibido buena aceptación entre los usuarios que han tenido oportunidad de adquirirlas, principalmente por su alto grado de personalización en colores y acabados, y lo accesibles que pueden ser tanto en su adquisición como en su mantenimiento. Se reconoce que no compite en resistencia y capacidad de prensión fina con sus homólogas de importación, más que nada por el material quirúrgico del dispositivo terminal. Sin embargo, bajo el contexto nacional, los niños y padres de familia no valoran más la resistencia y precisión como la seguridad, costo y estética del producto, Figura 48.
La realización de esta propuesta a través de una metodología para diseño de productos agrega la promesa de mejora continua en su dispositivo, ya que el sistema planteado y el registro digital del usuario permite la actualización sistemática de la tecnología.

