











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1. Introducción
En el área de control automático existen diversos sistemas dinámicos interesantes y desafiantes en el sentido de su control y manipulación. Si bien resultados analíticos en el diseño de algoritmos de control son altamente deseados, resulta importante el realizar trabajos con el objetivo de proveer referencias para la construcción de prototipos que permitan, mediante su uso, la definición de “nada es mas convincente que la prueba experimental” de dichos algoritmos diseñados. Es en este sentido en el que se desarrolla la principal contribución del presente artículo, siendo esta el diseño, construcción y control de un prototipo de un helicóptero de tres grados de libertad (Asensio, J. (2008), Faludi, R. (2010), Monzón, I. (2013)). El propósito final del prototipo consiste en proveer al diseñador de teorías de control, de una plataforma para probar los diseños de algoritmos en tiempo real, para su posterior análisis. Dentro de aquellos sistemas dinámicos utilizados comúnmente para la prueba de algoritmos de control, a saber, péndulo invertido (Melgarejo-Rey, M.A. (2011), Yusuf, L.A. (2014), Gandhi, P.S. (2016)), sistemas bola y viga (Marton, L. (2006), Amjad, M. (2010)) y tanques acoplados (Nath, U.M. (2016), Xiangjie, L. (2012)), entre otros, también se encuentran aquellos relativos a vehículos no tripulados. Dentro de los vehículos no tripulados se incluyen los relacionados con drones y helicópteros de dos y tres grados de libertad.
Dichos sistemas dinámicos tienen la característica de ser definidos matemáticamente como sistemas no lineales. Adicionalmente, estos sistemas presentan múltiples entradas y salidas, generando con ello una amplia gama de posibilidades en el contexto del diseño de algoritmos de control. El helicóptero de tres grados de libertad consiste en un sistema compuesto por un cuerpo suspendido por una articulación que permite su rotación alrededor del eje z como consecuencia de un movimiento de brazo menor alrededor del eje y montado en uno de sus extremos. Este brazo menor alberga dos hélices accionadas por un par de motores y, finalmente, el cuerpo contiene, en el otro extremo, un contrapeso a cargo de la reducción de los requisitos de potencia de los motores. Si bien es vasta la información relativa a los helicópteros de tres grados de libertad, se presentan a continuación aquellos trabajos importantes en su ámbito. En Zhai, Y. (2010) se aborda el control del helicóptero de tres grados de libertad utilizando un control predictivo considerando una linealización sucesiva. El trabajo realizado en Ishitobi, M. (2010), por su parte, presenta el diseño de un control no-lineal para el sistema dinámico, aspecto considerado como la principal aportación de dicho trabajo. En Ferreira de Loza, A. (2012), además, se aplica la metodología de diseño de modos deslizantes para la observación, identificación y control del vehículo utilizando un controlador robusto. La investigación presentada en Lan, J. (2017), por otro lado, aborda el diseño de un esquema de control tolerante a fallas, con el objetivo de hacer frente a funcionamientos erróneos en la instrumentación del sistema, específicamente en los actuadores del mismo.
Finalmente, cabe el comentario concluyente de que, a partir de las referencias previamente comentadas, el sistema dinámico de un helicóptero de tres grados de libertad presenta una dinámica tal que puede ser utilizado para el diseño y prueba de algoritmos de control complejos (Saska, M. (2014)). Así pues, se manifiesta la principal contribución del presente artículo: una guía para el diseño y construcción de un helicóptero de tres grados de libertad cuyo objetivo final consiste en la prueba experimental de diseños de algoritmos de control automático. Sin más, el presente artículo tiene la siguiente estructura: la sección 2 muestra el diseño del prototipo, la sección 3 aborda su instrumentación, la sección 4 el software requerido para la manipulación del prototipo y, finalmente, la sección 5 muestra los resultados experimentales que corroboran el correcto funcionamiento de la instrumentación del prototipo. Una breve conclusión se presenta en la sección 6.
2. Diseño del prototipo
Los helicópteros son una de las máquinas más complejas debido a la versatilidad y maniobrabilidad para desempeñar un gran número de tareas. Es por eso que a pesar de tratarse también de un vehículo que gira, su dinámica de vuelo es distinta y compleja. Para el diseño de los helicópteros de tres gados de libertad no existe una restricción en cuanto al tamaño, ya que su diseño corresponde a la necesidad o función que éste debe realizar. La estructura esquemática del helicóptero se ilustra en la Figura 1, con el fin de describir el movimiento del helicóptero.
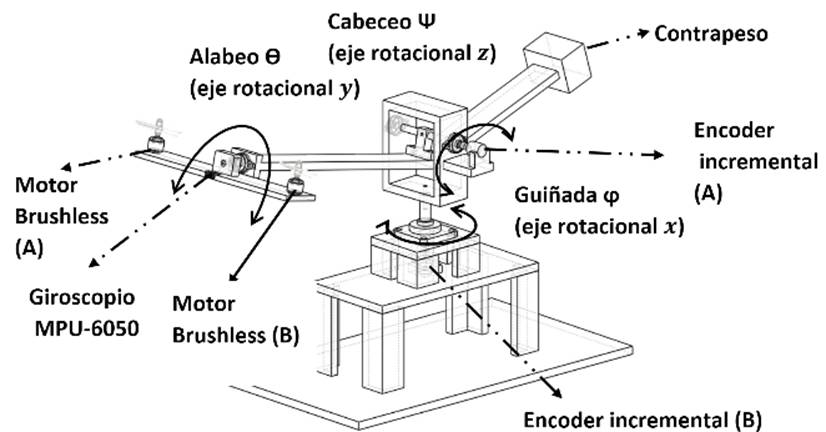
El helicóptero de tres grados de libertad se compone de 2 motores, cada uno con una hélice. Estas pueden tener dos, tres o cuatro aspas; en particular para este prototipo se consideraron motores con 2 aspas. La configuración del diseño presentado a lo largo de este documento se enfoca en un prototipo didáctico para pruebas de control y aplicaciones tecnológicas. En esta configuración los 2 motores se encuentran ubicados en los extremos del eje rotacional y. El eje rotacional z gira aproximadamente 45° (ver Figura 1). Por otra parte, el eje rotacional x permite tener un giro de 360° sobre su propio eje, permitiendo que el helicóptero tenga un movimiento de giro en diferentes direcciones. Los 2 motores son equidistantes tanto uno del otro como del centro mismo de la estructura, generando un empuje y par. Como resultado de esto, con el objetivo de que el vehículo se eleve y pueda desplazarse en el aire, es necesario que el sentido de giro de los motores y el tipo de hélice a utilizar en cada motor correspondan a una de las configuraciones ilustradas en la Figura 1.
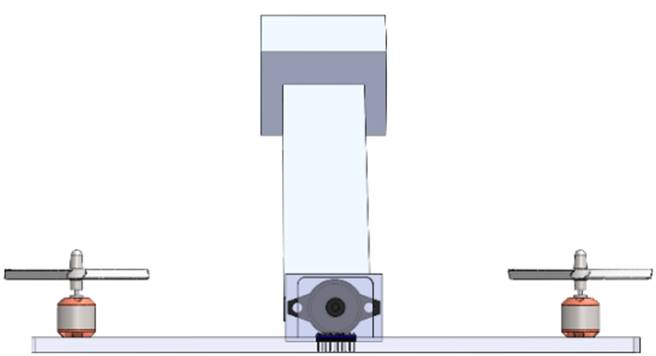
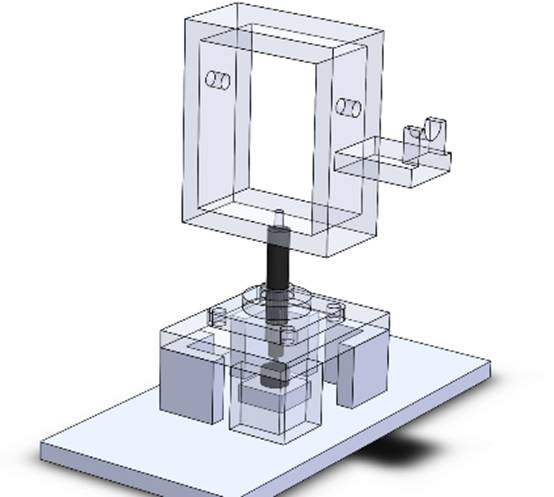
Finalmente, esta simetría permite un mejor control, desplazamiento y estabilidad en el vehículo. De las características descritas anteriormente, el prototipo construido considera la distribución de la masa del helicóptero, permitiendo con ello que la posición de reposo se encuentre en un ángulo de 45° con respecto al eje pivotante z y a 180° con respecto a al eje pivotante y. Para ello, como comentario final, es necesario que la masa delantera y trasera (contrapeso) se encuentren en un punto céntrico de tal manera que se distribuya por igual las masas (ver Figura 2).
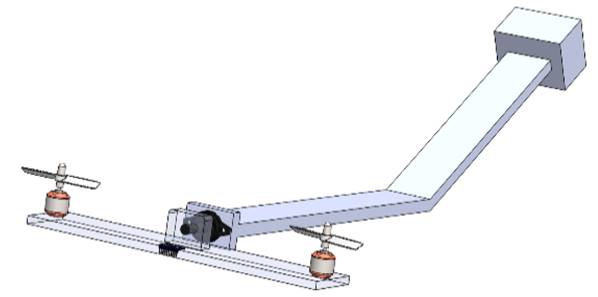
Por lo tanto, el diseño toma en cuenta: el peso de los motores, la masa de las hélices, la distribución de los tornillos de sujeción, los cables de datos y de potencia, ubicación de sensores y fuerza de empuje de los motores (ver Figura 3).
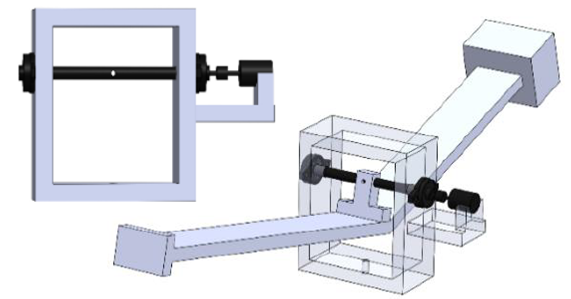
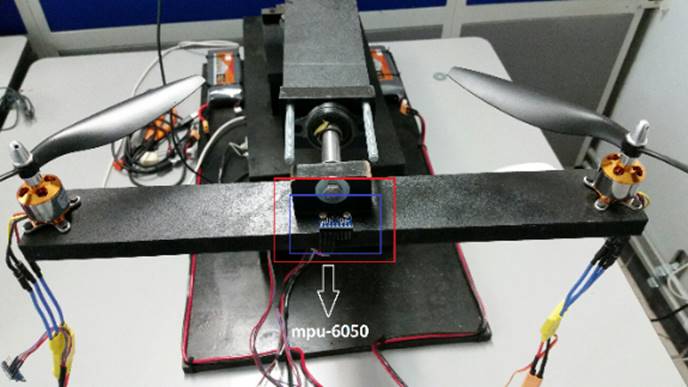
El diseño incluye una serie de soportes que permiten colocar de forma adecuada la ubicación de los motores para el eje rotacional y por medio de tornillos de sujeción, tomando en cuenta un soporte que permite colocar el sensor (giroscopio MPU-6050) a cargo de la medición del giro del eje rotacional y directamente sobre el punto pivotado. Este sensor entrega la medición de la posición y velocidad en dicho eje. Adicionalmente, el diseño considera una base que permite generar el movimiento rotacional en x y z. Para el diseño del eje rotacional z, se diseñó una estructura que soporta el sensor de posición rotacional, el cual permite tener un movimiento en el eje z con el menor rozamiento posible, por lo tanto, la fricción se puede considerar despreciable. Este eje soporta la carga del eje rotacional y (ver Figura 4).
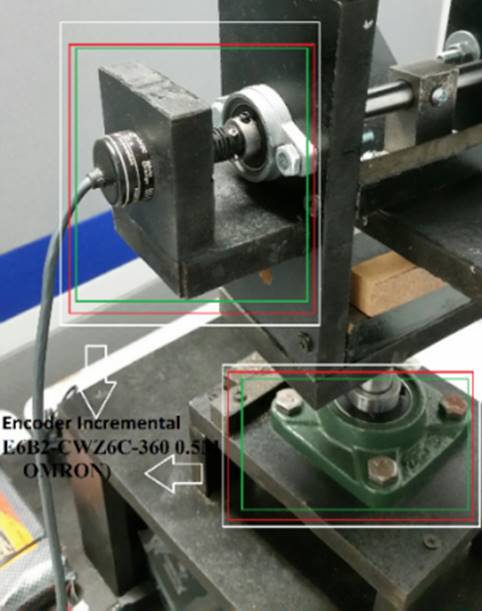
Por último, la base que permitirá el movimiento rotacional con respecto al eje x se muestra en la Figura 5. Cabe el comentario de que esta soporta los ejes rotacionales con respecto a y y z (para mayor detalle ver Figura 1), además de que incluye un sensor de posición rotacional encargado de la medición de dicha posición angular.

Es de gran importancia la colocación de este sensor ya que determina la posición, asegurando siempre que la posición de reposo del helicóptero sea fácilmente controlada. Así mismo, se debe asegurar que el centro de masa se encuentre bien ubicado, con el objetivo de eliminar el exceso de fricción en el pivoteo. Como resultado de esto se evita que el sensor tenga desgaste físico a consecuencia de los giros del helicóptero (ver Figura 6).
El diseño presentado anteriormente se desarrolló con la plataforma solidworks, la cual permite tener una aproximación del helicóptero de tres grados de libertad con sus movimientos en los ejes rotacionales x, y y z, con el fin de la aplicación de técnicas de control robusto, controladores lineales y no lineales. Para la elaboración de esta plataforma se ha seleccionado el MDF industrial con un espesor de 12.7 mm como material de construcción de la estructura, esto a razón de que su densidad permite una excelente relación entre el tamaño del helicóptero y el peso del mismo (Arias, L. (2004)). El MDF facilita el ensamble y cambio de piezas que sufren con la vibración de los motores. Dicho modelo estructural se aprecia en la Figura 7.
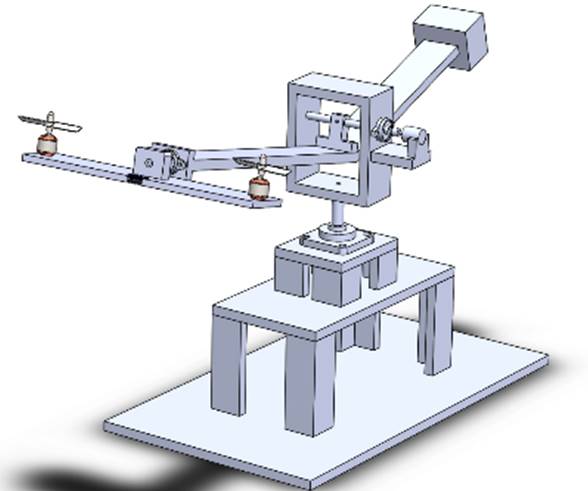
El helicóptero posee dos hélices y son controladas por dos motores sin escobillas, uno por cada hélice. Los dos motores controlan el movimiento de los ejes rotacionales x, y y z. Adicionalmente, la planta posee una IMU (por sus siglas en inglés Inertial Measurement Unit) para la medición de la posición y velocidad angular en el eje y y dos sensores de posición rotacional para complementar la medición del eje rotacional x y z (ver Figura 10).
3. Instrumentación del prototipo.
La instrumentación del helicóptero de tres grados de libertad requiere de sensores que midan las variables del sistema que ajusta al equipo a un punto de operación deseado. A través de los sensores se observa el comportamiento dinámico de cada uno de sus ejes rotacionales (x, y, z). La disposición de los elementos mecánicos a utilizar en el prototipo depende del diseño desarrollado en solidworks, presentada de manera general en la Figura 9.
Los sensores (giroscopio y sensores de prosición) pueden monitorear continuamente y determinan la posición y/o velocidad de cada uno de los ejes rotacionales del helicóptero de tres grados de libertad. Parte importante de la construcción de este prototipo son los esfuerzos mecánicos a los que se someten durante el funcionamiento, los cuales pueden ser:
Esfuerzos externos o directamente dependientes de la aplicación (momento, peso del elemento de transmisión, fuerza radial externa, fuerza axial, esfuerzos sobre la estructura).
Esfuerzos internos, inherentes al propio motor, independientemente de la máquina accionada (pesos propios, fuerzas radiales y axiales de atracción magnética, desequilibrios internos, etc.).
3.1. Descripción de la instrumentación del helicóptero de tres grados de libertad.
En el proceso de armado e instrumentación cumple con los requerimientos mínimos necesarios (peso, dimensión, material y acoplamientos de sus partes) para llevar acabo el posicionamiento y control de velocidad de cada uno de sus ejes rotacionales (x, y, z). Para describir de forma técnica cada uno de sus elementos que conforman a la construcción e instrumentación de este prototipo, se presentan los principales equipos y materiales empleados en este trabajo:
3.1.1 Sensores
♦ Giroscopio
Para la medición del ángulo de alabeo (movimiento rotacional en y) y las velocidades de cada uno de los ejes se ha seleccionado el sensor MPU-6050 de bajo costo, mostrado en la Figura 10.
El mpu-6050 es una IMU de 6 grados de libertad, ya que consta de un acelerómetro y un giroscopio, ambos de tres ejes. El MPU-6050 emplea un protocolo de comunicación I2C para la medición de aceleración y velocidad angular. Es importante mencionar que este sensor es adecuado para tener un control sobre la medición de vibración y posicionamiento de este prototipo. Los rangos de medida van desde 0° hasta 360° (eje rotacional y).
♦ Sensor de posición rotacional (E6B2-CWZ6C-360 0.5M OMROM).
El sensor de posición rotacional tiene un amplio rango de voltaje de operación de 5 a 24 VCC. Resolución de 2.000 pulsos/revolución en 40 mm. Una gran carga de 30 N en la dirección radial y 20 N en la dirección de empuje (ver Figura 11). Estos sensores de posición rotacional miden el ángulo de cabeceo y el ángulo de guiñada.
3.1.2. Actuadores
♦ Motores sin escobillas.
Estos motores son los encargados de transmitir la potencia necesaria a las hélices para elevar el helicóptero de tres grados de libertad. Se han seleccionado los motores sin escobillas A2212/13T, los cuales son altamente empleados en aplicaciones de prototipos aéreos. Dichos motores poseen una relación Kv de 1000 rpm/v, una eficiencia cercana al 80% y una velocidad máxima de 10500 rpm (ver Figura 12).

Parte importante de estos motores son los ESC (Control de Velocidad para motor sin Escobillas), los cuales permiten convertir la corriente continua de la batería con una tensión constante a una fuente de tensión variable y de sentido reversible por cada polo del motor (ver Figura 13).

El criterio principal de selección para los controladores de velocidad es la corriente máxima suministrada a los motores. Para ello, se seleccionó un ESC HOBBYPOWER de 30A. En cuanto a la tensión máxima de entrada, los valores más habituales son las baterías lipo de 2-4 celdas como máximo, recordemos que a mayor tensión de la batería, menor será el valor de amperios para mover la misma masa.
3.1.3. Tarjeta de adquisición de datos
♦ NI myRIO
Es una tarjeta de adquisición de datos reconfigurable que permite ejercer control sobre el helicóptero de tres grados libertad, obteniendo los datos de los sensores conectados a ella (ver Figura 14).

Las principales características de la tarjeta son: entradas y salidas (E/S) en ambos lados del dispositivo en forma de conectores MXP y MSP, incluye 10 entradas analógicas, 6 salidas analógicas, 40 líneas de E/S digitales, WiFi, LEDs, un pulsador (interruptor), un acelerómetro interno, un FPGA Xilinx y un procesador dual-core ARM Cortex-A9. Es posible programar la tarjeta con LabVIEW o C.
4. Software
El software utilizado para la manipulación del prototipo fue construido en el ambiente de programación LabVIEW (Rtale, V. (2014)). Dicho software ofrece un enfoque de programación gráfica que ayuda a analizar cada aspecto de la aplicación generada basada en un lenguaje de programación visual, incluyendo configuración de hardware, datos y depuración. Comenzado la explicación de la programación utilizada para la manipulación del prototipo, se mencionada que en términos generales esta puede ser dividida en dos secciones: aquella requerida para la inicialización de los actuadores, y la relativa a la medición de las variables involucradas en el sistema dinámico. Lo relacionado con las mediciones, o sensores, se aprecia en la Figura 15.
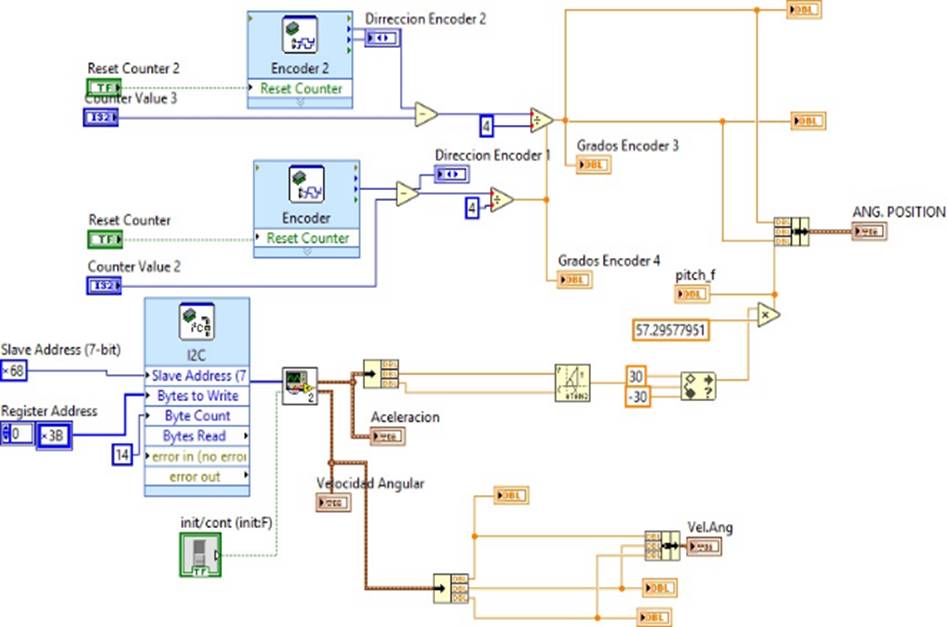
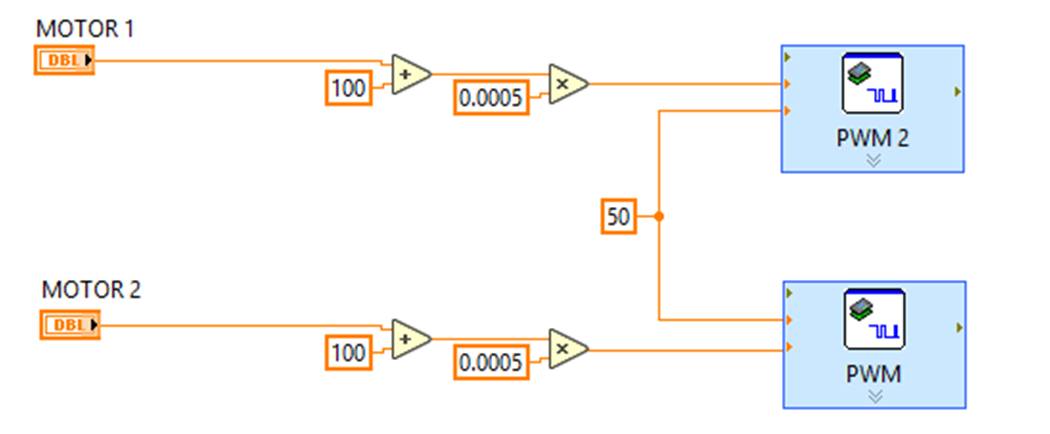
A partir de la Figura 15 es posible apreciar, a la izquierda, tres bloques principales, dos de los cuales son idénticos. Aquellos elementos similares son los encargados de proporcionar las mediciones provenientes de los sensores de posición rotativos, siendo esta una de las principales ventajas del uso del LabVIEW: el software contiene herramientas dedicados a la manipulación de sensores de posición rotativos con base en el hecho de que la tarjeta de adquisición de datos admite este tipo directo de elementos de medición. Estos sensores proveen la medición de las posiciones angulares de cada uno de los grados de libertad del prototipo, explicados en secciones anteriores. El bloque ubicado en la parte inferior izquierda, por su parte, se encarga de la manipulación del MPU-6050 a cargo de proporcionar la medición de las velocidades de cada uno de los grados de libertad del sistema. Este bloque es, en efecto, una ventaja adicional del LabVIEW, siendo esta la preparación de un elemento que permite la conexión mediante el protocolo de comunicación I2C. Finalmente, la programación relativa a los actuadores se presenta en la Figura 16, a partir de la cual se identifican dos bloques a cargo de la manipulación de los PWM requeridos para la operación de los motores. Note que éstos contienen dos entradas, una dedicada a la definición de la frecuencia de operación (50 Hz) y la restante que define el ancho de pulso de la señal aplicada.
Una vez explicado el software utilizado para la medición de las variables del sistema dinámico y la correspondiente manipulación de los actuadores del sistema, entonces es posible presentar las pruebas experimentales realizadas en el prototipo.
5. Resultados
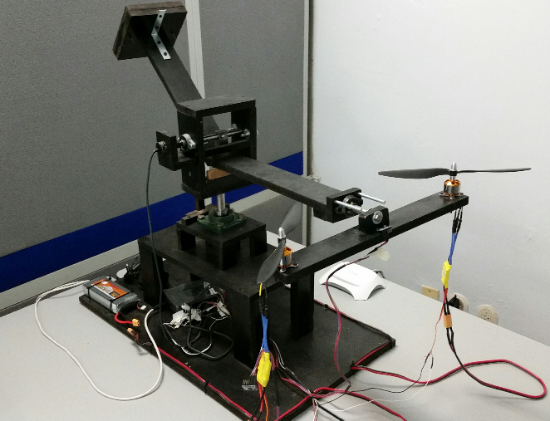
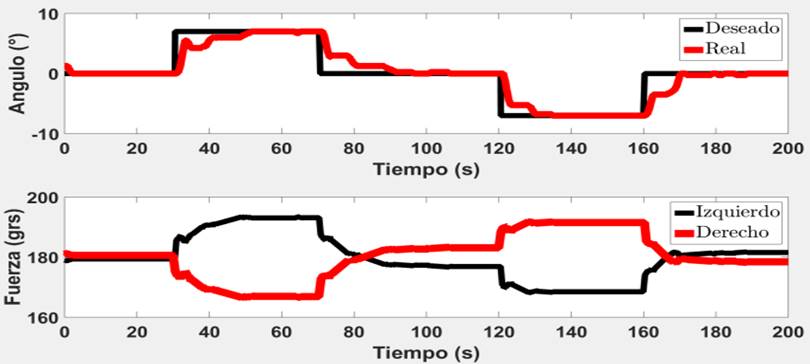
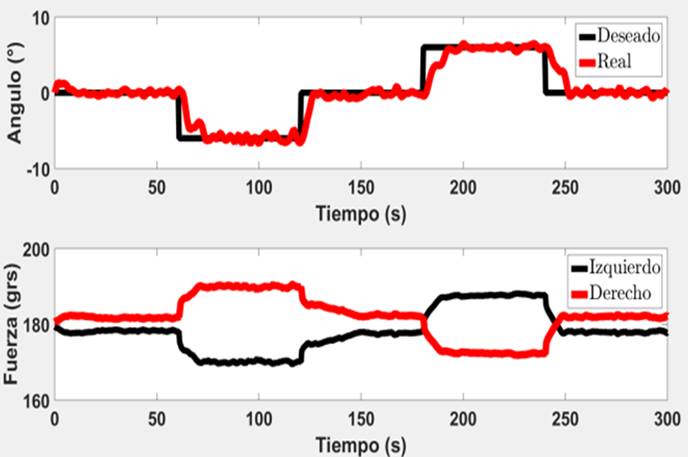
Con el objetivo de evaluar la efectividad de la instrumentación del prototipo abordada en secciones anteriores, se selecciona un controlador de tipo proporcional-integral-derivativo (PID) (Dorf, R.C. (2005) y Ogata, K. (2003)) a cargo de la regulación de cada uno de los tres grados de libertad del prototipo. Los resultados presentados a continuación se realizan considerando cada grado de libertad por separado, eliminando los restantes mediante la inclusión de restricciones mecánicas. Aquellas pruebas mostradas en las Figuras 19 y 20, son realizadas adoptando distintas direcciones de giro para ambos motores, caso contrario al resultado presentado en la Figura 21. El panel trasero utilizado para las pruebas referidas se presenta en la Figura 17.
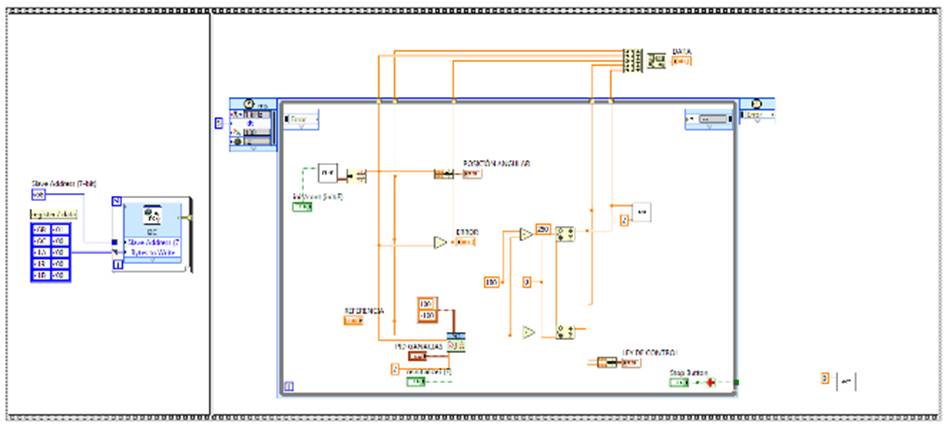
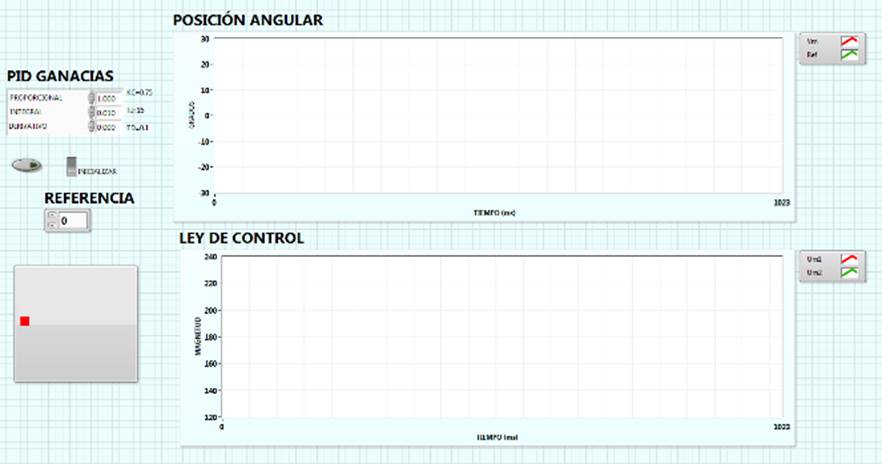
En la Figura 17 se muestra, en la parte inferior, el controlador PID cuyas ganancias de control son ingresadas en el control “PID gains”. En la imagen referida pueden ser apreciados aquellos subVi’s encargados de la medición de las variables y el relativo a los actuadores: señales requeridas y manipuladas que tienen como objetivo garantizar la convergencia de la variable controlada al valor deseado. Aquellos controles programados y considerados en la Figura 17, finalmente, construyen el panel frontal mostrado en la Figura 18.
Note que en la parte superior de la Figura 17 se tiene un indicador llamado “DATA”, cuyo objetivo consiste en guardar los datos generados de la prueba para su posterior análisis. Las ganancias del controlador fueron asignadas empíricamente basadas en el siguiente procedimiento. En principio se trabaja con la ganancia proporcional considerando las ganancias integral y derivativa cero, incrementando gradualmente su valor justo antes de que el sistema comience a oscilar. A manera de ejemplo, esto quiere decir que, si se trabaja con el movimiento alrededor del eje z, entonces el valor adoptado para la ganancia será aquel que garantice que el ángulo correspondiente no presente un comportamiento senoidal, es decir, el valor será aquel menor al que genere el comportamiento senoidal. Una vez asignada la ganancia proporcional, se incrementa la ganancia integral gradualmente hasta conseguir la regulación de la variable controlada al valor deseado en un tiempo y con un comportamiento definido por el diseñador. Finalmente, se ajusta la ganancia derivativa en caso de que esta sea necesaria y conveniente, dado que es bien sabido que la acción PI es suficiente para garantizar convergencia de la variable controlada al valor deseado en ausencia de perturbaciones variables en el tiempo. Así, la Figura 19 presenta los resultados de la regulación del sistema para el ángulo de guiñada (movimiento alrededor del eje z) considerando las ganancias para el controlador Kp=0.75, Ti=15 y Kd=0.1.
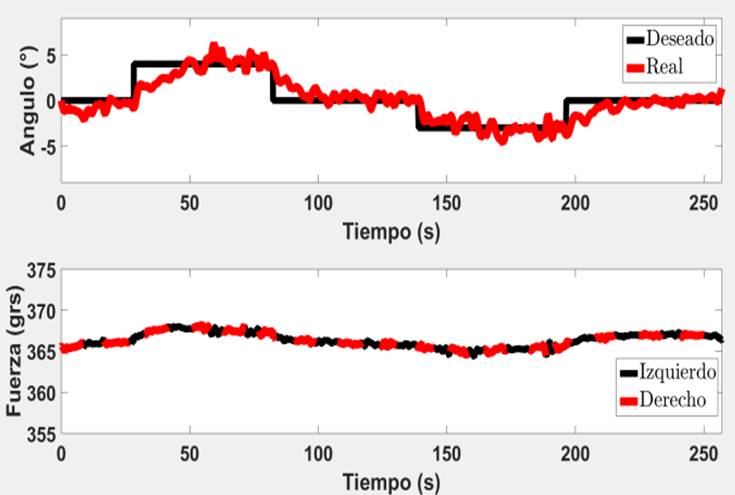
La Figura 19, en su gráfico superior, muestra la convergencia del valor real al valor deseado con un buen comportamiento en términos de tiempo de regulación. En la figura referida, el gráfico restante presenta la fuerza generada por cada uno de los motores necesaria para asegurar los objetivos de control. Para el ángulo de alabeo, por su parte, considerando los valores para el controlador Kp=0.1, Ti=0.01 y Kd=0, se obtienen los resultados mostrados en la Figura 20; cuya interpretación se realiza de forma similar a la mencionada para la prueba relativa al ángulo de guiñada.
Finalmente, los resultados de la regulación del ángulo de cabeceo corresponden a los presentados en la Figura 21. Con respecto a las pruebas presentadas con anterioridad, note que ambos motores ejercer la misma fuerza, esto con el objetivo de generar un movimiento alrededor del eje x. Para este caso, como comentario final, se adopta la misma dirección de giro para ambos motores.
6. Conclusiones
En el presente artículo se aborda el diseño, construcción y control de un helicóptero de tres grados de libertad. Se evalúa el prototipo a partir de resultados experimentales, cuyo objetivo consiste en corroborar el correcto funcionamiento de la instrumentación y construcción del mismo, utilizado un controlador de tipo PID el cual fue sintonizado empíricamente. A partir de los resultados mostrados, se concluye que el prototipo generado representa una opción viable y económica para la aplicación de algoritmos complejos de control en un sistema dinámico de un helicóptero de tres grados de libertad.

