











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
Introducción
Hoy en día, ciertas partes de la República Mexicana y distintos sitios del mundo enfrentan problemas debido a los asentamientos diferenciales y agrietamientos en los suelos ocasionados por el fenómeno de subsidencia, provocando cuantiosos daños en las vías terrestres, asimismo destacando su importancia en ayudar a satisfacer las actividades económicas de cualquier ciudad (Pacheco, 2007; Medellín, 2015; Lira, 2016; Ochoa et al., 2018); debido al constante mantenimiento de las vías terrestres donde el monitoreo o la inspección del deterioro de los pavimentos juega un papel importante en la conservación de las infraestructuras, permitiendo sugerir procedimientos para su reparación, mantenimiento y reposición del mismo.
El fenómeno de subsidencia es una de las principales causas en los pavimentos, atribuyéndose a la sobreexplotación de los mantos acuíferos para el abastecimiento de agua potable. Esta problemática se ha presentado en diferentes ciudades de la República Mexicana, tales como: Aguascalientes, Celaya, Ciudad de México, Irapuato, León, Morelia, Querétaro, Salamanca, San Luis Potosí, entre otros (Carreón et al., 2006; Ávila y Garduño, 2008; Tomás et al., 2009; Pacheco et al., 2013). La demanda excesiva del vital líquido en las zonas áridas y semiáridas en Querétaro han provocado el abatimiento de agua subterránea en diferentes zonas, ocasionando que las afectaciones se incrementen de una forma excesiva sin percibir soluciones a corto plazo (Chávez, 2008). En Querétaro, al menos 16 pozos profundos de agua potable han colapsado a la pérdida del esfuerzo cortante provocado por las diferentes fallas que cruzan la ciudad; así mismo, muchas de las fallas observadas en las llanuras son ocasionadas por el fenómeno de subsidencia, ocasionando hundimientos de uno a tres metros en los últimos 40 años (Castellazzi et al., 2016).
La infinidad de daños en los pavimentos y las técnicas para la identificación de las áreas que requieren de atención, conllevan al desarrollo de nuevas tecnologías que permitan reducir los tiempos de recolección de información, considerando excelentes facilidades y condiciones de trabajo. Los Vehículos Aéreos No Tripulados (VANT) son instrumentos de alta accesibilidad, de bajo costo y permiten obtener fotografías de alta resolución de manera sencilla y flexible (Hemmelder et al., 2018), también posibilitan salvaguardar la integridad de los operadores en ambientes peligrosos, además de que necesitan pocas restricciones de vuelo (ISPRS, 2004; Shi et al., 2011; Xiang & Tian, 2011; Patterson et al., 2014). Los VANT han recopilado con mayor amplitud los datos en campo (Dering et al., 2019); aunado a lo anterior, para mejorar la precisión de los resultados es posible combinarlos con herramientas adicionales para un mejor desempeño (Jiménez et al., 2017); una de esas herramientas es el GPS, cuya función es reducir el sesgo de la información usando al menos cuatro o cinco GCP, debido a que estos se agregan a las estaciones de la cámara durante el proceso de la información evitando que existan errores significativos, principalmente en las elevaciones, cuando solo se ocupan las posiciones de la cámara para realizar el procesamiento (Forlani et al., 2018); el uso adecuado de GCP, distribuidos en la zona, permite tener un mejor control para la corrección plani-altimétrica de las imágenes, generando errores aceptables (Jimenez et al., 2017; Liew et al., 2012; Martínez, et al., 2018).
El presente artículo describe una metodología para detectar los daños en los pavimentos por agrietamientos y asentamientos en áreas con subsidencia mediante el uso de un VANT y un GPS usando imágenes de alta resolución contemplando ocho GCP georreferenciados y corregidos por la estación más cercana al sitio de estudio; cuyo objetivo es identificar de una manera rápida y específica las superficies dañadas por medio de la generación de MDEs y ortomosaicos, obteniendo las elevaciones de los modelos obtenidos.
Marco teórico
Estudios previos
Algunos autores han centrado sus investigaciones en el fenómeno subsidencia, considerando que los primeros casos fueron por extracción de agua y se estudiaron por Fuller en 1908 (Poland, 1984). Posteriormente, se comprobó que la extracción de agua de un acuífero está vinculada a la compresión del mismo y que la minoración de la acumulación puede ser permanente o recuperable (Meinzer, 1928). Sin embargo, desde el decenio de 1950, Nabor Carrillo mencionó que la subsidencia estaba vinculada a la extracción de agua subterránea de arcillas de origen lacustre (Marsal & Mazari, 1959). Asimismo, algunos autores enfocaron sus investigaciones en el fenómeno de subsidencia mediante tecnologías como el VANT y el GPS, debido a las excelentes condiciones de trabajo y facilidad de uso: Niethammer et al. (2012) y Luccier et al. (2013) utilizaron los VANT para reconstruir deslizamientos de tierra por medio de fotografías aéreas; Miller & Shrizaei (2019), quienes posteriormente al huracán “Harvey” notaron que la subsidencia en Texas modificó algunas áreas de inundación por medio de un procesamiento interferométrico.
Los GPS han incursionado en la ingeniería de una forma eficiente por la facilidad de poder adquirir datos precisos en campo; Cortés et al. (2010) y Llenera & Suárez (2015) han ocupado los GPS para elaborar sistemas de referencia y tiempo utilizando las distintas posiciones de los satélites para obtener finalmente altitud, longitud y latitud de un punto sobre la superficie de la tierra mediante triangulaciones en computadoras.
El sitio de estudio para esta investigación fue seleccionado por los constantes movimientos a través de los años, siendo el resultado de interés por los investigadores, debido a los cuantiosos daños que han ocurrido en este lugar por las diferentes fallas que atraviesa la ciudad de Santiago de Querétaro; todo lo anterior ocasionado por el sistema de fallas con dirección norte-sur y desplazamiento normal (Carreón et al., 2005). Por otro lado, Pacheco (2007) construyó algunos mapas de anomalía gravimétrica y gradiente, mediante un estudio gravimétrico en el cual utilizó seis perfiles sobre la formación de fallas. Como consecuencia de lo anterior, Protección Civil del Estado de Querétaro (2015) creó el Atlas de Riesgos (Figura 1), donde se registró el riesgo de hundimientos y fracturamiento del subsuelo, así como también su vulnerabilidad en las zonas aledañas a las fallas existentes.

Fenómeno de subsidencia
Diferentes autores han descrito el fenómeno subsidencia como el hundimiento o asentamiento de la superficie terrestre, obtenido durante varios procesos, el cual conlleva a que existan desplazamientos verticales y en algunos casos puedan ser horizontales en una escala pequeña (Poland et al., 1972). Corapcioglu (1984) la define como aquella que implica el asentamiento de la superficie terrestre en un sitio considerando diferentes factores, los cuales pueden ser naturales o causados por las actividades humanas; Galloway et al. (1999) y Medellín (2015) aluden que es aquel asentamiento gradual o hundimiento repentino de una superficie debido a los movimientos subsuperficiales de los materiales por distintas actividades extractivas de fluidos, sedimentación, descenso de nivel freático, entre otros.
VANT
Los VANT son conocidos abiertamente como drones, los cuales son normalmente utilizados para adquirir imágenes aéreas en pequeños tiempos y a alturas deseadas, manteniendo una elevada resolución (Colomina & Molina, 2014). Los VANT están compuestos por una plataforma área equipada con un sistema de navegación, una cámara y un control remoto donde se programa y monitorea la actividad con la ayuda de un dispositivo móvil (Escalante et al., 2016).
De acuerdo con Barmpounakis et al. (2016) es necesario determinar el modo de grabación del video, se deben configurar parámetros como estabilización, localización, navegación e identificación de objetos.
GPS
Los GPS son instrumentos autónomos y tienen su propio sistema de referencia y escala de tiempo usando las distintas posiciones de los satélites (Llenera y Suárez, 2015); aunado lo anterior, es necesario contar con computadoras en red para poder obtener altitud y longitud de un punto sobre la superficie de la tierra (Cortés et al., 2010).
Por otro lado, Cortés et al. (2010) describe que son herramientas de gran exactitud, pero tienen algunos errores por diferentes factores como interferencias eléctricas imprevistas, el error multisenda, fenómenos meteorológicos, la imprecisión de los relojes, entre otros más.
Punto de Control Terrestre (GCP)
Cruz (2008), menciona que un GCP es un punto físico sobre la tierra, el cual es establecido por un sistema de coordenadas y que sirve como guía para realizar distintos trabajos; el propósito de los GCP es poder georreferenciar de acuerdo con las necesidades de cada proyecto, objetos o fenómenos de interés. Asimismo, se utilizan para la rectificación de imágenes aéreas en un enfoque no paramétrico. Si se usa el GCP en la fotogrametría VANT, es necesario colocar varios puntos y tener una excelente distribución de puntos en el área de interés (Liew et al., 2012).
Ortomosaicos
Un mosaico es un conjunto de imágenes capturadas desde una o varias cámaras, con él es probable poder realizar traslapes entre las imágenes, uniéndolas y combinándolas en una sola, amplificando el rango de visión de la escena (Cheng et al., 2007). Escalante et al, (2016), mencionan que, si un mosaico es corregido por distorsiones generadas por el relieve y los objetos que interfieren con él, adoptan el nombre de ortomosaicos.
Modelo digital de elevación (MDE)
Un MDE es una representación visual y matemática de las alturas de un sitio en estudio, está relacionada al nivel medio del mar y es posible obtener formas del relieve para ser caracterizadas, así como también elementos y otros objetos presentes. Frecuentemente son utilizados en distintos estudios relacionados con la geología, la ingeniería, la arquitectura y el medio ambiente (Akturk & Altunel, 2018; INEGI, 2019).
Existen dos tipos de MDE: uno es el Modelo Digital de Superficie (MDS), que representa todos los elementos existentes o presentes en la superficie de la tierra (vegetación, edificaciones, infraestructura); y el Modelo Digital de Terreno (MDT) donde se produce la forma del terreno una vez que fueron removidos todos los elementos ajenos (Fuentes et al., 2012).
Materiales y métodos
Área de estudio
La investigación para este artículo se centró en el municipio de Santiago de Querétaro, Estado de Querétaro, México (Figura 2), la zona en estudio tiene una topografía irregular debido a que cruza una falla por subsidencia, esta se encuentra en continuo movimiento desde hace años y ha provocado que la infraestructura carretera del sitio se dañe a pesar de las continuas reparaciones, esta falla se ubica en la parte del centro del municipio de Querétaro, la cual se muestra en la Figura 3, atravesando las colonias de “El Ensueño”, “Jardines de la Hacienda” y “San Pablo”, entre otras.


Adaptada de Protección Civil (2015)
Figura 3 Sistema de fallas en la Zona Centro y ubicación en la colonia “El Ensueño”.
El sitio de estudio presenta desplazamientos verticales orientados de NE-SW y NW-SE, donde la colonia con más daños es la denominada “El Ensueño”, y que se encuentra en el elipsoide WGS 84 (World Geodetic System, 1984), con los parámetros de semieje mayor 6378137.00 y semieje menor 6356752.314, y que se ubica en la zona 14 con coordenadas UTM 2276546.01 N y 352689.16 E, donde se considera un área de 27, 224 m2. Los datos recolectados por diferentes colegas e investigadores han determinado que las variaciones de los niveles estáticos en la zona en estudio en los últimos años ha sido de 120 m, donde se tiene un estrato deformable superior a los 20 m, presentándose a consecuencia de esto un asentamiento acumulado de 29 cm en un periodo de 19 meses, lo que da un asentamiento anual entre 12 y 15 cm.
Colocación de puntos de control terrestre
En el sitio de estudio se colocaron ocho GPC distribuidos de manera estratégica, con la finalidad de poder tener un excelente control de la corrección plani-altimétrica de las imágenes; se distribuyeron seis a lo largo de la falla y dos ubicados a unos 30 metros de ella, estos últimos sirvieron como testigos para la creación de los modelos. Se situaron de esa manera debido a que los desplazamientos pueden ser más notorios si los GCP se encuentran a desnivel (un GCP arriba y otro abajo); cada uno fue construido con placas de acero soldadas a varillas de acero (Figura 4) y que de esta manera pudieran medirse con el GPS de doble frecuencia mostrado en la Figura 5.


La distribución final de los GCP en la Colonia “El Ensueño” se muestra en la Figura 6; por otro lado, para la identificación de los GCP se utilizaron dianas durante el vuelo del VANT, debido a que las placas no eran visibles.

Recopilación de datos
Para la recopilación de los datos se usó un VANT DJI Phantom 4, con sensor de imágenes de 20 megapíxeles, alcance de transmisión de 7 kilómetros y autonomía de 30 minutos de acuerdo con especificaciones del fabricante, sin embargo, el vuelo se apega a las consideraciones de la normativa oficial vigente (NOM-107-SCT3-2019). Asimismo, un GPS Sokkia GRX2 con software de campo Magnet Field y precisión en modo estático: Sólo: L1: H: 3mm + 0.8 ppm, V: 4mm + 1.0 ppm, según datos de fabricante.
Medición de puntos de control terrestre
Las mediciones de los GCP se realizaron con el GPS Sokkia GRX2 de modo estático y las fechas de medición se muestran en la Tabla 1.
Tabla 1 Fechas de las mediciones de los GCP
| Medición | Fecha |
|---|---|
| 1 | 21 y 22 de noviembre de 2019 |
| 2 | 23 y 24 de enero de 2020 |
| 3 | 18 de marzo de 2020 |
| 4 | 16 de agosto de 2020 |
| 5 | 19 y 20 de octubre de 2020 |
Algunos ejemplos se muestran en las Figuras 7 y 8, esto se realizó en cada uno de los ocho puntos durante el periodo de la investigación. Cada punto fue medido durante una hora con el GPS de alta precisión para cumplir los requisitos que establece el INEGI en las normativas, cabe mencionar que el periodo largo de medición se realiza para obtener un menor margen de error en los datos recopilados.


Planeación de vuelo y adquisición de imágenes
Los vuelos realizados con el VANT se enlistan en la Tabla 2.
Tabla 2 Vuelos realizados con el VANT
| Vuelo | Fecha | Tiempo de vuelo | Dimensiones del área cubierta |
|---|---|---|---|
| 1 | 26 de noviembre de 2019 | 6 minutos y 26 segundos | 127 x 144 m |
| 2 | 27 de enero de 2020 | 6 minutos y 15 segundos | 127 x 144 m |
| 3 | 19 de marzo de 2020 | 8 minutos y 2 segundos | 164 x 166 m |
| 4 | 23 de agosto de 2020 | 9 minutos y 2 segundos | 164 x 166 m |
| 5 | 20 de octubre de 2020 | 8 minutos y 48 segundos | 164 x 166 m |
La planeación de los vuelos se realizó mediante la aplicación móvil Pix4D (Figura 9) seleccionando los parámetros de traslape de imágenes de 80 % y 70 %, altitud de 60 metros y GSD de 2.67 cm/px.

Procesamiento de datos
Para procesar los datos obtenidos por el VANT y el GPS durante las mediciones en campo, se emplearon dos softwares: a) Topcon Tools para el procesamiento de los datos obtenidos por el GPS en el método estático y, b) Agisoft Metashape para el procesamiento de las imágenes obtenidas por el VANT.
Puntos de control terrestres
Para procesar los ocho GCP que fueron medidos durante todas las fechas especificadas anteriormente, se descargaron de la Red Geodésica Nacional Activa (RGNA) del INEGI, las mediciones de la estación UQRO con las coordenadas UTM 2277537.296 N y 352773.121 E, usando el elipsoide WGS 84 para el postproceso de los datos, dicha estación está ubicada en la Facultad de Ingeniería de la Universidad Autónoma de Querétaro (UAQ), la cual es la estación activa del Estado de Querétaro. Dichos datos obtenidos en formato RINEX se procesaron con el software UNERINEX del INEGI para unir las mediciones de las 24 horas, utilizando todas las fechas en las que se realizaron las mediciones para ser procesados mediante el software Topcon Tools y de esta manera poder corregir las coordenadas obtenidas por el GPS y tener un mínimo margen de error.
Imágenes
Las imágenes fueron procesadas con el software Agisoft Metashape y el procedimiento fue el siguiente:
Añadir las fotografías para procesar y orientarlas.
Crear la nube de puntos densa y posteriormente la malla.
Incluir los GCP mediante marcadores, identificando en todas las imágenes incluidas para el procesamiento las dianas que fueron colocadas renombrando cada punto y anexando las coordenadas exactas obtenidas por el GPS de alta precisión anteriormente medidas.
Seleccionar todas las imágenes, y desmarcar, con la finalidad de que las coordenadas con las que trabaje el procesamiento sean las coordenadas que se incluyeron anteriormente obtenidas por el GPS y no las obtenidas por el vuelo del VANT, puesto que estas pueden tener muchas deficiencias.
Optimizar el cálculo de las orientaciones y seguido de ello volver a crear la nube de puntos densa y la malla.
Clasificar los puntos del terreno mediante la pestaña de herramientas, nube de puntos densa y clasificar los puntos deseados.
Hacer la textura y después el modelo de teselas.
Para generar el modelo digital de elevaciones, este debe hacerse desde la capa de clase de puntos de terreno.
Crear el ortomosaico de las fotografías procesadas.
Finalmente, hacer la exportación de los archivos deseados y la generación del reporte del procesamiento.
Resultados
Los GCP fueron medidos por el GPS Sokkia GRX2 en modo estático, procesados con el software Topcon Tools y georreferenciados a la RGNA de INEGI, dichas actividades se ilustran a continuación, así mismo se muestran algunos ejemplos de postproceso de una medición en las Figuras 10 y 11, donde se observa el enlace de la estación activa de Querétaro y los GCP en coordenadas UTM.
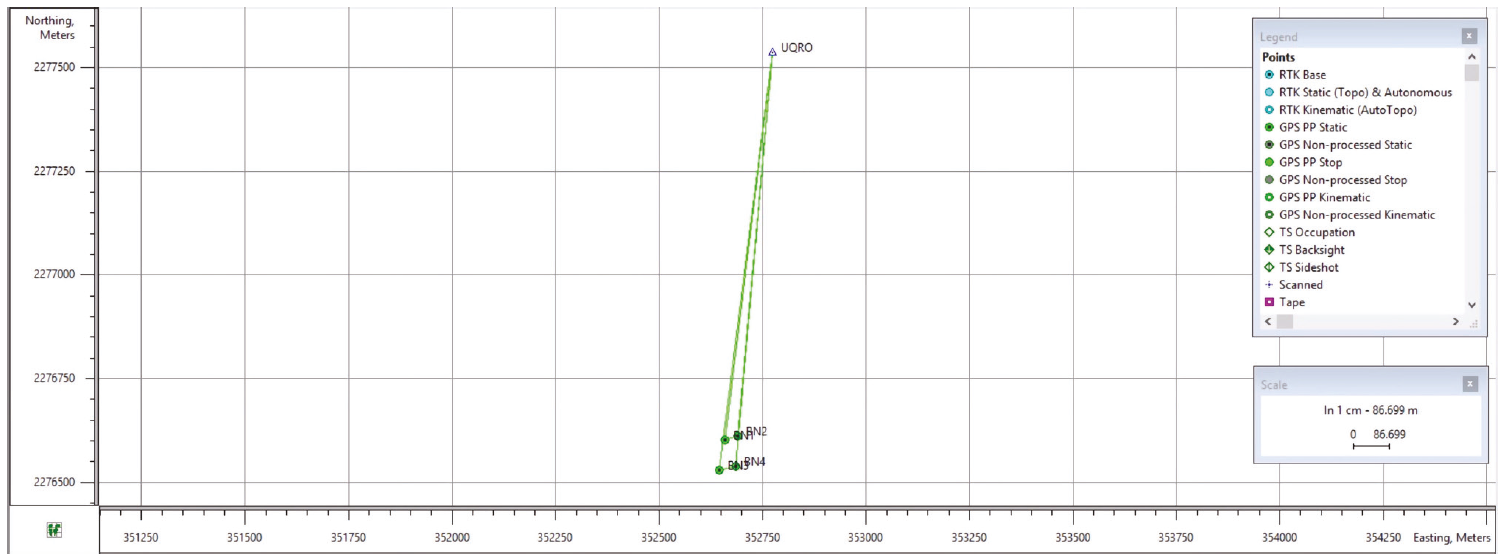
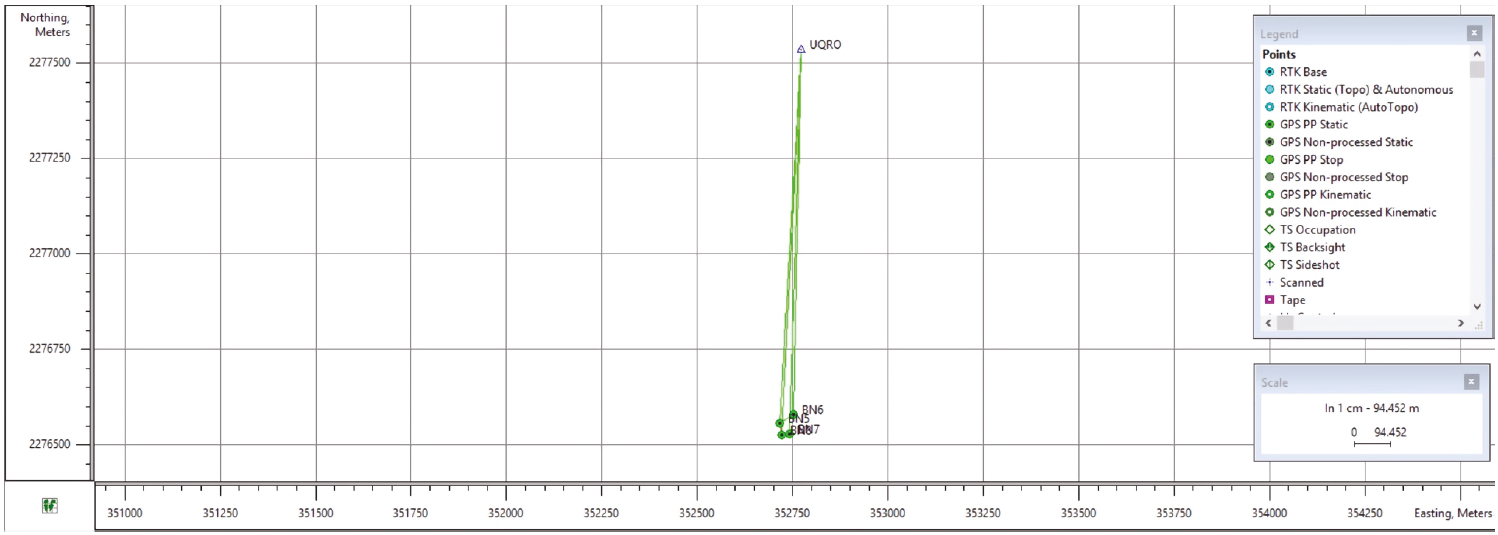
Cabe señalar que el procesamiento se hizo por separado, debido a que se utilizó la versión DEMO del software al no contar con la licencia específica. La versión DEMO solo permite procesar cinco puntos como máximo por trabajo, por lo cual se procesaron cuatro y cuatro, adjuntando a cada trabajo el punto de la estación activa de INEGI.
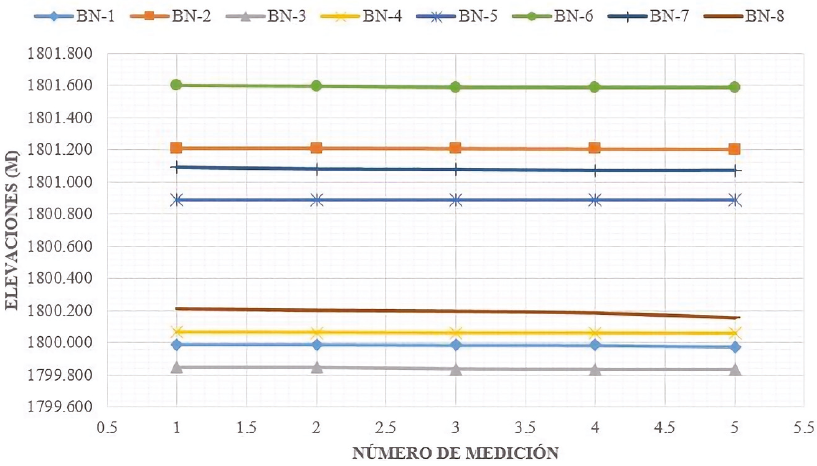
Como resultado del postprocesamiento de las mediciones, se obtuvieron las coordenadas y elevaciones de los GCP durante el periodo de la toma de datos en campo, la información se presenta en la Tabla 3, en la Figura 12 se ilustran a manera de ejemplo los comportamientos de cada BN.
Tabla 3 Coordenadas y elevaciones de GCP obtenidas mediante Topcon Tools
| Punto de control terrestre (GCP) |
Coordenadas UTM | Elevación (m) | |||||
|---|---|---|---|---|---|---|---|
| Norte | Este | Medición 1 | Medición 2 | Medición 3 | Medición 4 | Medición 5 | |
| BN-1 | 2276603.172 | 352658.640 | 1799.990 | 1799.989 | 1799.986 | 1799.985 | 1799.976 |
| BN-2 | 2276612.117 | 352690.927 | 1801.213 | 1801.213 | 1801.211 | 1801.208 | 1801.206 |
| BN-3 | 2276530.970 | 352644.985 | 1799.848 | 1799.848 | 1799.835 | 1799.832 | 1799.831 |
| BN-4 | 2276540.409 | 352684.722 | 1800.064 | 1800.063 | 1800.060 | 1800.060 | 1800.059 |
| BN-5 | 2276556.600 | 352715.471 | 1800.893 | 1800.892 | 1800.890 | 1800.887 | 1800.888 |
| BN-6 | 2276580.704 | 352752.989 | 1801.601 | 1800.597 | 1801.592 | 1801.591 | 1801.591 |
| BN-7 | 2276527.735 | 352741.952 | 1801.091 | 1801.080 | 1801.078 | 1801.072 | 1801.073 |
| BN-8 | 2276526.361 | 352721.866 | 1800.211 | 1800.200 | 1800.194 | 1800.184 | 1800.154 |
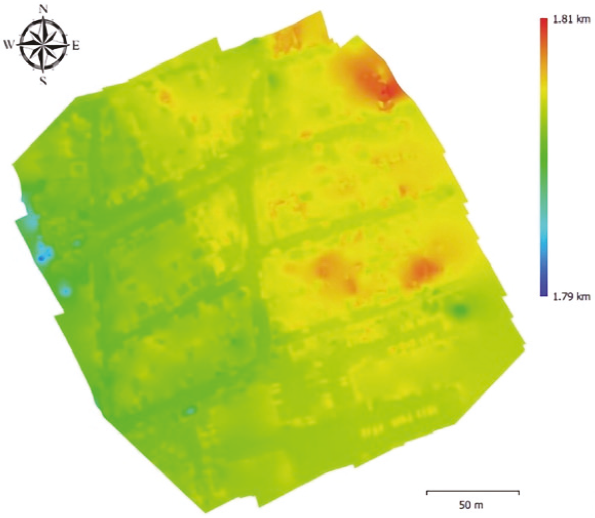
Posteriormente, las coordenadas y elevaciones fueron incluidas en el software Agisoft Metashape, mediante el cual se obtuvo el ortomosaico del área de estudio mostrado en la Figura 13.

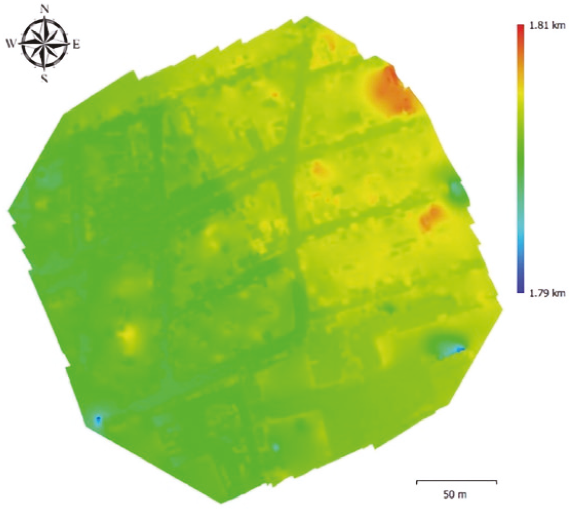
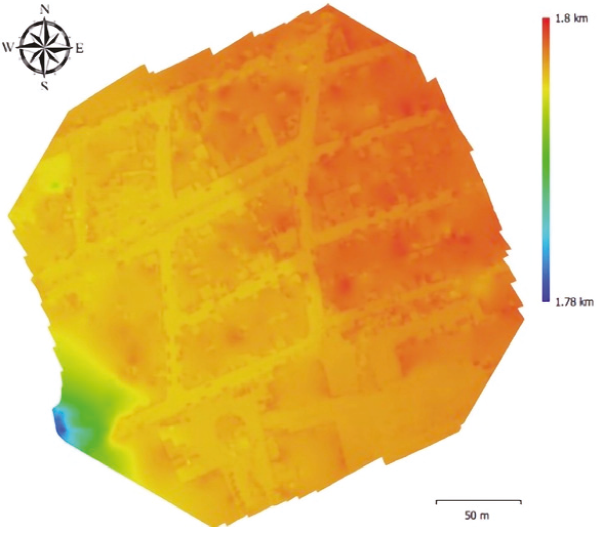
Los MDE obtenidos se muestran en las Figuras 14 a la 18 donde se pueden verificar los asentamientos que se tuvieron durante el periodo de la investigación, los cuales afectaron los diferentes tipos de pavimentos de la zona (concreto hidráulico en su mayoría, asfalto y adoquín) los cuales se encuentran en mayor parte de manera longitudinal en la falla del área de estudio. Esta área presenta agrietamientos superficiales en gran parte de su extensión, así como daños a las capas inferiores, causa principal de que el pavimento falle continuamente aun siendo reparado. Dicho fenómeno seguirá ocurriendo debido a las condiciones actuales del terreno debido a los continuos movimientos del sitio de estudio. En las figuras señaladas se puede apreciar la distinta gama de colores que presentan los MDE obtenidas mediante el procesamiento de las mismas, lo cual indican las elevaciones del sitio de estudio, considerando la zona más alta del lado derecho con una elevación promedio de 1800 msnm y del lado izquierdo con una elevación de 1799 msnm la zona más baja.


Conclusiones
El uso de los VANT aporta información espacial importante sobre la problemática en las vías terrestres; en este caso, fue la base para definir las afectaciones en los pavimentos en un sitio experimental donde el fenómeno de análisis fue la subsidencia. Es muy importante integrar estas tecnologías a cualquier problemática a fin de detectar daños en las vías terrestres.
La metodología plasmada en la presente investigación basada en el uso de las tecnologías (VANT y GPS) y del uso de softwares especializados (Topcon Tools y Agisoft Metashape) nos permitieron modelar y simular la problemática de la subsidencia, en este caso, con los monitoreos realizados (GPC) permitió definir con mayor precisión el fenómeno de subsidencia. Con ello, nos permite diagnosticar y proponer soluciones de procesos factibles para las restauraciones o mantenimientos en general.
El método utilizado funcionó de manera satisfactoria al ejecutarlo de manera conjunta, el uso de VANT con un GPS independiente y puntos de control terrestres ofrecieron resultados optimistas en términos de efectividad de la metodología. Lo innovador en esto, es que hay requerimientos mínimos de personal, se opera de manera rápida y confiable en la identificación de daños a través del ortomosaico, y resulta más práctico en trabajabilidad.
Las intensidades de los asentamientos se observan en los MDE realizados, donde físicamente en la zona experimental se tienen fallas estructurales en las diversas capas del pavimento; cabe mencionar que fuera de esta área, los pavimentos se encuentran en óptimas condiciones.
Los asentamientos registrados por medio del análisis digital y de campo, representa los cambios de niveles que se han registrado a través del tiempo, mismos que nos permitieron determinar las afectaciones que se han registrado, dado que según el análisis realizado son alrededor de 5.7 cm en el momento del monitoreo de la presente investigación.
Sobre los resultados obtenidos se determinó que la zona continuará presentando grietas en la infraestructura urbana, debido a que la región se encuentra prácticamente a lo largo de la falla geológica detectada, de esta manera los pavimentos continuarán presentando desgastes superficiales y en las capas inferiores. Con esto se sabe ahora que la región es un lugar inestable por efectos de la subsidencia, presentándose velocidades de asentamientos variables, por lo cual se requiere del monitoreo continuo para determinar en tiempo real las variaciones diferenciales y así poder corregir mediante acciones de mantenimiento los deterioros que pueden ocasionar daños materiales mediante tecnologías que faciliten la recolección de datos para la ejecución de soluciones.

