











 text new page (beta)
text new page (beta) English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1 Introduction
Switched Linear Systems (SLS) are hybrid dynamical systems whose dynamics are represented by a collection of Linear Systems (LS), together with an exogenous switching signal determining at each time instant the evolving LS. Hybrid systems capture the continuous and discrete interaction that appears in complex systems ranging from biological systems 14 to automotive systems 7. For SLS, many contributions have been reported concerning such basic system properties as stability, controllability, and observability.
Since the conditions for the observability with unknown inputs of the individual LS have been already established 4, the main problem for the observability of SLS is then to infer, from the knowledge of the continuous measurements, which LS is evolving. This is usually referred to as the distinguishability problem. This problem, together with the SLS observability, has been extensively studied in the literature for the case of known inputs 1,9,13,18,20. However, the observability of continuous-time SLS subject to unknown disturbances and unknown switching signals has received less attention.
In the context of unknown switching signals, the concept of observability of SLS becomes more complex than in the LS case. The complexity arises from the two following reasons: first, because the autonomous case 20 becomes non-equivalent to the non-autonomous case 1,9,13, as the input plays a central role; second, because the unknown switching signal may make the system's trajectory to be observable even if it is evolving in a unobservable LS1.
A geometric characterization of the main results presented in 1, 9, 13, 20 for SLS with unknown switching signal and no maximum dwell time was reported in a previous work 11.
If on the contrary a maximum dwell time is considered, then the SLS state does not need to be recovered before the first switching time, but after a finite number of switches, either by taking advantage of the underlying discrete event system 9 or by investigating the distinguishability between LS 13. This problem has been considered in 8 for autonomous systems and in 9 and 13 for the known input case.
Concerning the observer design, if the switching signal is unknown then the observer for SLS requires to estimate the switching signal from the continuous measurements via a location observer. In 2, the location observer uses a residual generator to infer a change in the continuous dynamics. In 10, an algorithm for computing the switching signal has been proposed for monovariable SLS with structured perturbations (i.e. disturbances with known derivatives). In 3, a super twisting based observer for unperturbed switched autonomous nonlinear systems has been presented. In 6, the location observer is formed by a set of Luenberger observers with an associated robust differentiator used to obtain the exact error signal which updates the estimate.
1.1 Main Contribution
In this paper we derive new observabilty and observer design results for perturbed SLS subject to an unknown switching signal. Based on the framework proposed in 11, here we consider a new observability notion that requires less restrictive conditions and is useful in practical applications.
The proposed observer, which extends the results of 12 to the perturbed case, is based on a collection of high order sliding mode based observers, one for each LS forming the SLS. In 12, the evolving LS was decided based on the output estimation error and an additional variable of the observer, used to measure the observer's effort to maintain a zero output estimation error (since more than one observer may give zero output estimation error). However, in the perturbed case addressed in this paper, the evolving LS must be inferred from the output estimation error only.
Based on the observability analysis here derived, we show that if the perturbed SLS is observable, then for "almost every" input only one observer in the collection will converge to a zero output estimation error (the one associated to the evolving LS), thus inferring the evolving LS and obtaining the associated continuous state. Compared to 1,2,3,6,9,12,12,13,20,22, the proposed approach addresses a wider class of SLS as unknown disturbances are considered. Moreover, unlike the recent results 19,22 where the switching signal is known, in our approach the continuous state together with the switching signal are inferred from the continuous output.
2 Preliminaries
2.1 On the Concept of "Almost Every" or "Almost Everywhere"
In this paper, the concept from measure theory of "almost everywhere" or for "almost every" is used to express that the observability property is practically certain to hold, except on a proper subspace of the complete state space (which is known as "shy set" or "Haar null set" 15)).
2.2 Preliminaries on Linear Systems
The next lines review some of the basic geometric concepts on LS which are mainly taken from 21.
A Linear System (LS) is represented by the dynamic equation
 1
1
where x ∈ X = ℝn X = 1" is the state vector, 𝒰 ∈ = ℝg is the control input, y ∈ Y = ℝ q is the output signal, d ∈ D = ℝ m is the disturbance and A,B,C, and S are constant matrices of appropriate dimensions.
Throughout this work Σ(Α, Β, C, S) denotes the LS (1). When the matrices are clear from the context, a LS is simply denoted by Σ.
For an initial condition x(t0) = x 0, without disturbance (d(t) = 0), the solution of (1) is given by
 2
2
The input function space, denoted by 𝒰 f, is considered to be L p (𝒰),1 i.e. it contains piecewise continuous functions. Throughout the paper, Β stands for Im Β (image or column space of B), S for Im S and Κ for ker C (kernel or null-space of C).
A subspace Τ⊂ X is called Α-invariant if AT ⊂ T. The supremal Α-invariant subspace contained in Κ is N = ker (C A
i
-1). The subspace N is known as the unobservable subspace of the LS Σ.
ker (C A
i
-1). The subspace N is known as the unobservable subspace of the LS Σ.
A subspace V ⊂ X is said to be (A, B)-invariant if there exists a state feedback u = Fx such that (A + BF)V ⊂ V or, equivalent, if AV ⊂ V + B. The set of maps F for which (A + BF)V ⊂ V holds is denoted as F(V).
The set of (A, B)-invariant subspaces contained in a subspace ℒ ⊂ X is denoted by ℑ(A, B; ℒ). This set is closed under addition, then it contains a supremal element 5), (21 denoted as sup ℑ (A, B; ℒ). Furthermore, sup ℑ (A,B; ℒ) can be computed with the following algorithm.
Algorithm 1. ( 5 ), ( 21 ) The subspace sup ℑ (A,B; ℒ) = V (k) where V (k) is the last term of the sequence
 3
3
where the value of k ≤ n-1 is determined by the condition V (k+1) = V (k) .
Lemma 2. 5 Any state trajectory x(t), t ∈ [t0, τ] of Σ belongs to a subspace ℒ ⊆ χ if and only if x(t 0 ) ∈ ℒ and ẋ(t) ∈ ℒ almost everywhere in [t 0 , τ [.
A LS is observable under unknown inputs iff a non-zero state trajectory producing a zero output does not exist. This is formally stated below.
Theorem 3. ( 5 ) Let Σ(Α,Β, C, S) be A LS. Then the LS Σ is observable under partially unknown inputs if and only if the sup ℑ (A, S; K) is trivial.
2.3 The Switched Linear System's Model
a SLS is described as a tuple Σσ = 〈ℱ,σ〉 where ℱ = {Σ1;...,Σ m } is a collection of LS and σ: [ t0, ∞) → {1,..., m} is the switching signal determining, at each time instant, the evolving LS Σσ ∈ ℱ. The SLSs state equation is represented by
 4
4
We use the notation x i (t,xο,u[t0, τ],d[t0, τ]), to emphasize that the state trajectory x(t) is obtained when σ(t) = i and the inputs u(t), d(t) are applied since the initial condition is x(t 0 ) = x 0 . In a similar way, y i (t,x 0 ,u(t),d(t)) represents the output trajectory of xi(t,x 0 ,u(t),d(t)), i.e.
When we want to emphasize that the state trajectory is restricted to an interval [ τ1; τ2 ], we write y i (t,x 0 ,u [ τ 1,u τ 2], d [ τ 1,u τ 2] , where u [ τ 1,u τ 2] , d [ τ 1,u τ 2] are the restriction of the functions u(t), d(t) to [τ 1 ,u τ 2 ]. When d(t) = 0, we write y i (t,x 0 ,u(t)), and on autonomous systems we write y i (t,x0).
Let us remark that even though a SLS is formed by a collection of LS, the classical results on the fundamental properties of LS, such as stability, observability, and controllability, do not hold straightforwardly in the switching case.
2.4 Assumptions
Unless otherwise is stated, the following assumptions on the SLS are considered.
A. 1. Only a finite number of switches can occur in a finite interval, i.e. Zeno behavior is not possible.
A. 2. The initial condition of the SLS is bounded, i.e. ||x0|| < δ with a known constants.
A. 3. A minimum dwell time in each discrete state is assumed, i.e.t k-1 and t k are two consecutive switching times, then t k -t k > τ dk , where τ dk > 0 is fixed. However, only the dwell time for the first switching time τ d1 is assumed to be known. No maximum dwell time is set.
A. 4. The state x(t) is assumed to be continuous, i.e. at each switching time t 1, x(t 1 ) = x( 𝑥 1 − ).
2.5 Distinguishability in Perturbed Switched Linear Systems
In the following we review some of the results in observability using a geometric approach. This review is mainly taken from 11, where it was shown that many observability notions arise in the perturbed case of SLS. Next, using the same framework of 11, in Section 3 we will extend the results on a new (and less restrictive) observability notion that is more meaningful for the estimation using the proposed observer.
In the unknown switching signal setting, it is fundamental to infer the evolving linear system, and thus estimate the switching signal from the continuous input-output information. That problem is known as the distinguishability problem.
Formally, the LS Σ i is said indistinguishable from another LS Σ j if there exist x 0 , d [ t0, τ ] x' 0 , and d' [ t0, τ ] s.t.
 5
5
If (5) holds for some x 0 , d ([ t0, τ ] , x' 0 , and d' [ t0, τ ] , it is impossible to determine from the measured signals, u [ t0, τ ] and y [ t0, τ ] , if the state trajectory was generated by Σ i or by Σ j ·, consequently, it is impossible to determine if the continuous initial state is x0 or x' 0 . On the contrary, if (5) does not hold for all x 0 , d [ t0, τ ] , x' 0 , and d' [ t0, τ ] , then the pair of LS is said distinguishable, since it is possible to determine if the state is generated by Σ i or by Σj from u [ t0, τ ] and y [ t0, τ ]) . The indistinguishability subspace Ŵ ij of Σi, Σj is defined as

and represents the set of initial conditions that under a particular input makes it impossible to determine which is the evolving system and the current discrete state. Then if the state trajectory x i (t,x 0 ,u [ t0, τ ] ,d [ t0, τ ] ) evolves inside 𝒬iŴ ij then it is impossible' to determine, from the measurements, if the evolving state trajectory is x i (t, x0, u [ t0, τ ] , d [ t0, τ ] ) or x j (t, x´0, u [ t0, τ ] ,d' [ t0, τ ] ), thus it is not possible to infer either the continuous initial state which could be x0 or x' 0 or the discrete state which could be σ(t) = i or σ (t) = j ∀t ∈ [ t0, τ ].
For a given pair of LS, Σ
i
and Σ
j
·, the extended LS  is defined as
is defined as
 6
6
The state space  of is denoted by
of is denoted by  We denote by
We denote by  (t) the initial state, by the state trajectory, and by
(t) the initial state, by the state trajectory, and by  the disturbance signal of the extended LS .
the disturbance signal of the extended LS .
Let us denote the natural projection of  over X as 𝒬
i
: → X, i.e., 𝒬
i
([x
T
x
T
]
T
) = x.
over X as 𝒬
i
: → X, i.e., 𝒬
i
([x
T
x
T
]
T
) = x.
Lemma 4. Let Σ
i
and Σ
j
be two LS. Equation (5) holds if and only if the extended LS  produces a zero output for all t ∈ [ t0, τ ], i.e.
produces a zero output for all t ∈ [ t0, τ ], i.e.  With
With  =
= , u(t) and
, u(t) and  = [ dT (t) d'T (t) ]T.
= [ dT (t) d'T (t) ]T.
Proof. The proof can be found in (11). □
The following result characterizes the indistinguishability subspace.
Lemma 5. Let Σi and Σj be two LS and let Bij= [  Ŝij]. Then the indistinguishability subspace Ŵij is equal to the supremal
Ŝij]. Then the indistinguishability subspace Ŵij is equal to the supremal  -invariant subspace contained in
-invariant subspace contained in  = Ker
= Ker  ; denoted as sup ℑ
; denoted as sup ℑ 
Proof. The proof can be found in (11). □
By means of Algorithm 1 that computes (A, B)-invariant subspaces, the indistinguishability sub-space can be obtained. This subspace is fundamental, since the distinguishability and the observability can be derived from it.
It is worth noting that control inputs play a central role in inferring the evolving LS. In order to use such input to distinguish Σi from Σj·, these input has to be capable of steering the state trajectory outside 𝒬iŴij, i.e. the projection of the indistinguis hability subspace Ŵij over X. The conditions for this case are presented below.
Proposition 6. Let Σi and Σj be two LS. Then for almost every input Σi and Σj are distinguishable, i.e.
 7
7
if and only if
 .
8
.
8
Proof. The proof can be found in 11. □
3 New Observability Conditions Meaningful in Practical Cases
In this section we derive less restrictive conditions for the distinguishability (hence, for the observability), that can be used in practical applications.
If condition (8) is not satisfied for a pair of LS Σ
i
and Σ
j
then, by Lemma 4, for every u(t) there exist ẋ
0
and  = [d(t) d'(t) ]
T
such that Σ
ij
produces a zero output for all t ∈ [ t0, τ ]. As recalled in Subsection 2.2, an input that makes the extended system unobservable (equivalents Σ
i
and Σ
j
, indistinguishable) can be written as a state feedback = Fẋ, where F ∈ F(suP ℑ
= [d(t) d'(t) ]
T
such that Σ
ij
produces a zero output for all t ∈ [ t0, τ ]. As recalled in Subsection 2.2, an input that makes the extended system unobservable (equivalents Σ
i
and Σ
j
, indistinguishable) can be written as a state feedback = Fẋ, where F ∈ F(suP ℑ  ); Moreover, condition (8) gives the possibility for the input to be in Ŝij. Therefore, regardless of the input, we can write any disturbance making the LS Σi and Σj indistinguishable as = Fẋ + v(t), where v(t) ∈ Ŝ
ij
. Now, by Lemma 2
); Moreover, condition (8) gives the possibility for the input to be in Ŝij. Therefore, regardless of the input, we can write any disturbance making the LS Σi and Σj indistinguishable as = Fẋ + v(t), where v(t) ∈ Ŝ
ij
. Now, by Lemma 2

This means that given u(t) there exists v(t) such that  in order to maintain the trajectory in the indistinguishable subspace Ŵ
ij
.
in order to maintain the trajectory in the indistinguishable subspace Ŵ
ij
.
Remark 7. Although the conditions of Proposition 8 guarantee that the control input can make the LS Σi and Σ j distinguishable regardless of the disturbance applied, in general, if u(t) is discontinuous then the corresponding disturbance d and d', making Σ i and Σ j indistinguishable, must be discontinuous as well with discontinuities at the same time. However, since u(t) and d(t) (the control input and disturbance driving Σ i ) are independent (in the sense that they are not functions of the same set of variables), the probability that their discontinuities are synchronized can be neglected.
A more convenient distinguishability notion for our setting (with less restrictive conditions), which can be derived using the same framework as in 11, can be stated as the following problem.
Problem 8. (Distinguishability for almost every control input when u(t) and d(t) are independent, and the latter is continuous)
Assume that d(t) and d!(t) are continuous on t ∈ [ t0, τ ], under which conditions is
 9
9
a shy set w.r.t f ?
Notice than requiring d(t) and d'(t) to be continuous on t ∈ [ t0, τ ] is not a restriction over the class of disturbance that we consider in our setting, but rather it avoids the unlikely case where d(t) has discontinuities at the same time as u(t).
Lemma 9. Let Σ i and Σ j be two LS, and assume that d(t) and d'(t) are continuous on t ∈ [ t0, τ ]. Then
 10
10
is a shy set, i.e. Σ i and Σ j are distinguishable for almost every input with u(t) and d(t) independent and d(t) continuous, if and only if either
 11
11
or
 12
12
holds, where Ŝ
i
Im Ŝ
i
and Ŝ
i
= Im Ŝ
i
with Ŝ
i
=  ∈ ℝ2N and Ŝ
j
=
∈ ℝ2N and Ŝ
j
=  ∈ ℝ2n .
∈ ℝ2n .
Proof. (Necessity) Assume that  ⊆ Ŵ
ij
and Ŝ
i
⊆ Ŵ
ij
+ Ŝ
j
then by (11. Lemma 13), Ŵ
ij
= sup ℑ
⊆ Ŵ
ij
and Ŝ
i
⊆ Ŵ
ij
+ Ŝ
j
then by (11. Lemma 13), Ŵ
ij
= sup ℑ  Now let= d´(t)= Fẋ + υ With F ∈ F(suP ℑ ); and u such that Ŝi d(i) + Ŝj u(t) ∈ Ŵij. Then notice that, if ẋ0 ∈ Ŵij and ẋ(t) Ŵij, thus by Lemma 2, ẋ(t) ∈ Ŵij regardless of u(t). Hence, (10) is equal to 𝒰f and (10) is not a shy set.
Now let= d´(t)= Fẋ + υ With F ∈ F(suP ℑ ); and u such that Ŝi d(i) + Ŝj u(t) ∈ Ŵij. Then notice that, if ẋ0 ∈ Ŵij and ẋ(t) Ŵij, thus by Lemma 2, ẋ(t) ∈ Ŵij regardless of u(t). Hence, (10) is equal to 𝒰f and (10) is not a shy set.
(Sufficiency) Assume that (10) is not a shy set. In (11) it was shown that if an input exists to distinguish two LS then almost every input can be used. Thus, (10) being a shy set implies that (10) is equal to 𝒰f i.e. 
yi(x0,u [ t0, τ ], d[ t0, τ ] ) = yj(x´0,u[ t0, τ ], d´[ t0, τ ])
Let d'(t) = F + υ (notice that if υ is continuous then d'(t) is continuous as well) with F ∈
+ υ (notice that if υ is continuous then d'(t) is continuous as well) with F ∈
F(sup ℑ ). Thus, by Lemma 2
 13
13
In particular consider d(t) = 0. Since u(t) can be discontinuous on [ t
0
, τ ] and d'(t) cannot, then  evolves inside Ŵ
ij
for every u(t)i.e.
evolves inside Ŵ
ij
for every u(t)i.e.  ⊆ Ŵ
ij
. Now, consider d(t) ≠ 0. Since (
⊆ Ŵ
ij
. Now, consider d(t) ≠ 0. Since ( + Ŝ
j
F)
+ Ŝ
j
F)  (𝑡) +
(𝑡) +  evolves inside Ŵij, then (13) implies that for every d(t) there exists u(t) such that Ŝi d(t) + Ŝj u(t) ∈ Ŵij, i.e. Ŝi ⊆ Ŵij + Ŝj which completes the proof. □
evolves inside Ŵij, then (13) implies that for every d(t) there exists u(t) such that Ŝi d(t) + Ŝj u(t) ∈ Ŵij, i.e. Ŝi ⊆ Ŵij + Ŝj which completes the proof. □
Based on the distinguishability result we can state the observability for SLS.
Theorem 10. Let 𝒢 = 〈ℱ, σ〉 be a SLS with partially unknown inputs and maximum dwell time τ = ∞. Then, the continuous state x0 and x(t) and the discrete state σ0 and σ(t) can be uniquely computed (said observable) for almost every control input, with u(t) and d(t) independent and d(t) continuous, if and only if every LS Σi ∈ ℱ is observable with partially unknown inputs (i.e. according to Theorem 3) and ∀Σi; Σj, ∈ ℱ i ≠ j, either ⊈ Ŵ
ij
or Ŝ
i
⊈Ŵ
ij
+ Ŝ
j
.
Proof. The proof follows from the previous argument. □
4 Observer Design for Perturbed SLS
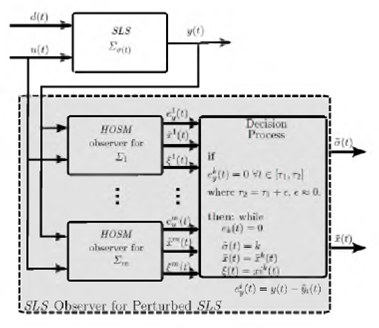
In this section we show that if the continuous and the discrete states of the SLS are observable according to Theorem 10, then the SLS admits an observer based on a multi-observer structure, in which a finite-time observer is designed for each LS composing the SLS. It will be shown that, based on the observability results previously presented, a set of finite-time observers allow us to decide the evolving LS from the output estimation error. The observability of the SLS implies that the observer associated with the evolving /.Swill produce a zero output estimation error whereas the rest of the observers associated to LS that are distinguishable from the evolving one, cannot produce a zero output estimation error. Thus, the evolving LS is the one associated to the observer with zero output estimation error, whereas an exact estimation of the continuous state is provided by such observer. This observer extends the design proposed in 12 in order to consider unknown inputs.
The construction of the observer for each LS is based on the multivariable observability form (see, for instance, 16)). Let us firstly introduce some results about the transformation of an observable LS into such form.
Lemma 11. If the LS is observable under partially unknown inputs, i.e. if sup ℑ (A, S; K) is the trivial subspace, then there exists a set of integers {r1,..., r m } such that ∀ i ∈ {1,..., m} ∀k ∈{0,...,r i -2}, Ci A k S = 0 and rank(0 {ri... , rm} ) = n where

Proof. The proof is presented in Appendix A. □
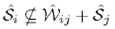
The values {r1 ..., r m } are known as the observability indices of ∑(A,B,C,S) 16. A LS observable under unknown inputs can be transformed by means of the similarity transformation T, defined such that T- 1 = O{r1..., rm} , into the multivariate observability form2 (see l6)).The resulting LS is given by the following matrices.
Notice that the transformed LS is composed of blocks, each one in the observer canonical form (see 16)), but coupled only through the measured variables  . Each i-th block is of dimension ri and is of the form
. Each i-th block is of dimension ri and is of the form
 14
14
where the  ... and
... and 
In what follows, let us consider the following assumption.
A. 5. The disturbances  are differentiate and satisfy L
i
≥
are differentiate and satisfy L
i
≥  with known constants Li, i = 1,... ,m.
with known constants Li, i = 1,... ,m.
Thus, we can add to (14) the dynamics of  i.e.
i.e.

Then, an observer based in the robust differentiator described in 17 can be designed for each block in order to estimate the state of the system in the presence of disturbances. The observer is designed in such a way that its error dynamics coincides with the differentiation error of 17, for which convergence has already been demonstrated in 17.
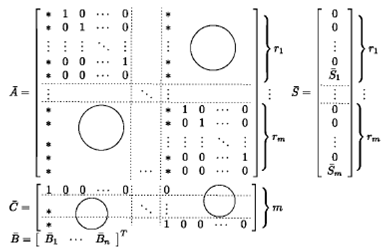
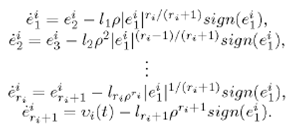
Thus, each block admits the following observer:
 15
15
Defining the error dynamics as  j= 1,..., m and
j= 1,..., m and  =
=  - ξ yields to
- ξ yields to
 16
16
Since the m subsystems are only coupled through the measured variables, which are fed into the observer by output injection through the terms  ,...,
,...,  is obtained in finite-time. By designing an observer (15) for each block, the continuous state x(t) of the LS can be estimated in finite-time.
is obtained in finite-time. By designing an observer (15) for each block, the continuous state x(t) of the LS can be estimated in finite-time.
Finally, assuming that each pair of LS Σi and Σ j is (u[τ1,τ2] y [τ1,τ2])-distinguishable under unknown inputs, if an observer is designed for each LS with time convergence bound τ < τ1< τ2, then the observer associated to the evolving LS will be the only one maintaining e y (t) = y(t) - ỹ(t) = 0 ∀t ∈ [τ1,τ2] (unlike the known input case where the ξ variable would be also maintained at ξ = 0, in the unknown input case ξ ≠ 0 12)).
Lemma 12. Let Σσ(t) be a SLS and  its observer with time convergence bound τ, and let σ(t) = i, ∀t ∈ [t
0
,t2]. Then, if Σ
i
and Σ
j
are distinguishable under unknown inputs according to Lemma 9, then for almost every input u(t),
its observer with time convergence bound τ, and let σ(t) = i, ∀t ∈ [t
0
,t2]. Then, if Σ
i
and Σ
j
are distinguishable under unknown inputs according to Lemma 9, then for almost every input u(t),
Proof. The proof follows by noticing, from (15), that whenever the output error signal
Thus, it follows by the assumption that Σi and Σ
j
are distinguishable under unknown inputs that whenever σ(t) = i, ∀t ∈ [τ,t1) only the observer associated to Σ
i
satisfies
Hence, a multi-observer structure depicted in Fig. 1 can be used to estimate the continuous state x(t) of the SLS and to compute the switching signal σ (t). Notice that, since by Lemma 12 only the observer associated to the evolving LS gives e
y
= 0, then by analysing this error signal the evolving LS can be ascertain. In a similar way, once the evolving LS Σ
j
has been detected, the switching occurrence to another LS, say Σ
j
, can be detected by the time when the error signal no longer satisfies e
y
= 0, because by the pairwise distinguishability when switching from Σ
i
to Σ
j
the signal
Remark 13. Let Σ i and Σ j be two LS observable under unknown inputs. Suppose the distinguishability conditions of Proposition 6 do not hold but those of Lemma 9 hold. In such case, as pointed out in Remark 7, if we make u(t) discontinuous then two cases may occur. The first one, no disturbance exists in Σ j such that (5) holds, in which case by Lemma 12 only the output estimation error of the observer associated to Σ i will be zero. The second one, the disturbance in Σ j required to make Σ i and Σ i indistinguishable is discontinuous as well, in which case the observer associated to Σ 0 may estimate x'(t) and d'(t) such that (5) holds, but the discontinuities of d'(t) will be synchronized with those of u(t) with a transient with e y ≠ 0. However, since u(t) and d(t) are independent then the synchronization of their discontinuities given by the observer associated to Σ j are identified as unlikely, thus discarding Σ5· as the evolving system. In this way discontinuous inputs in U p , are useful to make the LS distinguishable and the evolving LS can be inferred from the observers' output estimation error.
Proposition 14. Let the continuous and discrete state of Σ σ(x) be observable under unknown inputs, i.e. each LS Σ i ∈ℱ is observable under unknown inputs and pairwise the LS in ℱ are distinguishable under unknown inputs, and let T k be the similarity transformation taking the LS Σ k into the multivariate observer form. Then the state x(t) of Σ σ{x) and the switching signal σ(x) can be estimated by the following procedure:
Design an observer (15) with time convergence bound τ " τ d for each Σ i ∈ℱ.
The current state of σ(x) is k if
 (t) = T
k
x(t) with
(t) = T
k
x(t) with 
A switching is detected when the observer associated to Σ k no longer satisfies e y = 0.
After the switching t j is detected, the state of the observer i, i ∈ {l,..., m}, is reinitialized as
 i(tj) =
i(tj) = where x
i
(
where x
i
( The next state of σ(x) is l such that the observer associated to l is the only one satisfying
Proof. The proof follows by the previous argument and from the observability result which requires each pair of LS to be distinguishable for almost every control input. □
5 Illustrative Examples and Simulations
Example 15. (Observability under unknown inputs)
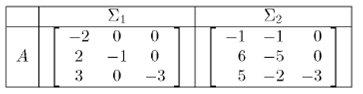
Consider the perturbed SLS Σσ(t) where σ(t) is an exogenous switching signal and ℱ = {Σι, Σ2} is the continuous dynamics composed of LS with system matrices as in Table 1, input matrices Β 1 = [0 2 0 ]T and B 2 = [ 0 1 1 ] T , output matrices C1 = [ 0 0 1 ] and C 2 = [ 0 1 -l ], and disturbance matrices S1 = [ l 0 0 ]T and S2 = [ 1 0 0 ]T.
The indistinguishability subspace of Σ1 and Σ2 is
Since Ŵ 12 is not trivial for every x 0 ∈ 𝒬1Ŵ 12 = X, there exist u(t) and d(t) such that (5) holds for some x' 0 and d'(t), making it impossible to infer the evolving LS.
For instance, suppose that the evolving LS is Σ1, with
x
0
= [ 0 2 0]
T
, u(t) =
and d(t) = 0, then the output is
y
i
(t,x
0
, u(t),d(t)) =
since the LS Σ j produces this same output with
x´0 = [ 0 1 1 ]T , u(t) =
and
d´(t) = -
then it is impossible to determine, from the input-output behavior, the evolving LS and the continuous initial state for the current state trajectory. Hence, the LS Σ1 and Σ2 cannot be distinguished for every state trajectory.
Moreover, since  ⊂ Ŵ
12
, then according to Proposition 6, there is no input u(t) allowing to distinguish Σ1 from Σ2, i.e. the effect of the input u(t) does not show up at the output of the extended system.
⊂ Ŵ
12
, then according to Proposition 6, there is no input u(t) allowing to distinguish Σ1 from Σ2, i.e. the effect of the input u(t) does not show up at the output of the extended system.
Furthermore, since  ⊂ Ŵ
12
+
⊂ Ŵ
12
+  and 𝒬1Ŵ
12
= X then for every state trajectory of Σ
i
, there exists a state trajectory of Σ2 producing the same output, therefore it is always impossible to distinguish the LS Σ1 from the LS Σ2, i.e. ∀x
0
, u(t), d(t) ∃ x'
0
,d'(t) such that (5) holds, in fact with x'o such that
and 𝒬1Ŵ
12
= X then for every state trajectory of Σ
i
, there exists a state trajectory of Σ2 producing the same output, therefore it is always impossible to distinguish the LS Σ1 from the LS Σ2, i.e. ∀x
0
, u(t), d(t) ∃ x'
0
,d'(t) such that (5) holds, in fact with x'o such that  ∈ Ŵ
12
and d´(t) - F
∈ Ŵ
12
and d´(t) - F (t) such that F ∈ F(Ŵ
12
) (e.g. F = [ 1 - 4 4 0 2 0]), then (5) holds.
(t) such that F ∈ F(Ŵ
12
) (e.g. F = [ 1 - 4 4 0 2 0]), then (5) holds.
The existence of this state feedback implies that for every state trajectory of the LS Σ1, there exist x' 0 and d'(t) (not necessarily constructed as a state feedback) in Σ2 such that it is impossible to determine the evolving system and the initial continuous state since there exist state trajectories in both LS producing the same input-output information.
Example 16. (Observability and Observer Design)
Now, if we consider the SLS composed of LS with system matrices as in Table 1, input matrices Β
1
=[ 1 2 0 ]T and B2 = [ 0 1 0]T , output matrices C1 = [ 0 0 1 [ and C
2
= [ 0 1 -1], and disturbance matrices S
l =
[ 1 0 0 [ T and S2 = [ 1 -

It is easy to verify that, both Σ1 and Σ2 are observable under unknown inputs, in addition, Σι and Σ2 are distinguishable from each other according to Lemma 9 as  ⊈ Ŵ
12
. Thus, according to Theorem 10, the continuous and discrete states of the SLS Σσ(t) are observable, in infinitesimal time, for almost every control input u(t), and the proposed observer design can be applied to estimate the continuous and discrete states of Σσ(t).
⊈ Ŵ
12
. Thus, according to Theorem 10, the continuous and discrete states of the SLS Σσ(t) are observable, in infinitesimal time, for almost every control input u(t), and the proposed observer design can be applied to estimate the continuous and discrete states of Σσ(t).
Fig. 2 illustrates the application of Lemma 12 to infer the evolving LS. It can be seen that the output estimation error e

Hence, the proposed observer determines the evolving LS and the switching signal using only the output information y(t) in spite of the unknown disturbance affecting the system.
Fig. 3 shows the estimation of the continuous state using the procedure described in Proposition 14. The continuous and discrete states of the SLS are estimated in finite-time by the proposed observer, using only the output information y(t) in spite of the unknown disturbance d(t).

It is worth noticing that, in the case where the disturbance is scalar, the proposed observer also estimates the unknown disturbance d(t). However, in general, the unknown disturbance is not estimated. The design of an unknown input observer for SLS can be derived straightforwardly if in addition to the observability under unknown inputs we require each LS to be invertible (i.e. two different disturbance signals cannot produce the same output).
6 Conclusions
Necessary and sufficient conditions for a new observability notion for perturbed SLS, meaningful for practical applications, have been derived, which result in less restrictive conditions than those reported previously in the literature. Based on the observability analysis we derive the conditions for detecting the evolving LS and estimating its continuous state from a collection of finite-time observers in spite of the acting disturbance.
As future work, we consider to model the discrete dynamic by Petri nets to reconstruct the continuous and discrete states after a finite number of switching.
A Proof of Lemma 11
Proof. The proof follows a similar development as the one shown in (5, Section 4.3.1). Consider the following iterative process, for simplicity let Β = 0 as the control input does not affect the observability under unknown inputs in LS. Let
 17
17
with
qo
(t) = y(t) and y0 = C. Differentiating (17) yields  = Y
0
Ax(t) + Y
0
Sd(t). Let P0 be a projection matrix such that kerP0 = Im(y0S'). Thus
= Y
0
Ax(t) + Y
0
Sd(t). Let P0 be a projection matrix such that kerP0 = Im(y0S'). Thus
 18
18
Let  and Y1 =
and Y1 =  then (17) and (18) can be combined to get
qi
(t) Y
lx
(t). It is easy to see that
then (17) and (18) can be combined to get
qi
(t) Y
lx
(t). It is easy to see that
The k-th iteration of the procedure yields q k (t) Y k x(t) such that
Notice that such iteration process coincides with Algorithm 1 and therefore converges to sup ℑ(A,S;K). Reordering Y k yields the matrix 0 {r1,... rm} . Since, after a sufficient number of iterations k, kev Y k = sup ℑ (A,S;K.) = 0, then rank (0{ri...irm}) = n. □


