











 text new page (beta)
text new page (beta) English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1 Introduction
It is important to study the stability of the switched differential systems, since they are used in mathematical physics of many fields such as power systems, gravity, motor engine control, network control systems, constrained robotics, automotive engineering [1-15]. One of the ways to examine the stability of switched systems is to study the dwell and average dwell time of the system.
We consider the linear switched system described by
where
Let us give the definition of globally asymptotically stability (GAS) for the point x (t) = 0, which is the trivial solution and the equilibrium point of the switched system (1).
The trivial solution of the system (1) is GAS for a given switching signal
- Lyapunov stable, and
- uniformly globally asymptotically convergent, i.e., for all
If each subsystems are GAS then there exists a minimum dwell time that guarantees GAS of the system (1). For the system (1), let the following sets of switching signals be defined, where t
i ’s are successive switching time instants and
Determination of the dwell or average dwell time is based on the calculation of the infimum of the numbers
There are many studies on the dwell and average dwell time for the GAS of the system (1) [17-22]. These studies are generally used the eigenvalues of the coefficient matrices of the given system. It is well known that the eigenvalue problem is an ill-posed problem for non-symmetric matrices [23-25]. Moreover, if a matrix has multiple eigenvalues, or is close to a matrix with multiple eigenvalues, then its Jordan normal form is very sensitive to perturbations. This ill conditioning makes it difficult to develop a robust numerical algorithm for the Jordan normal form. So, the Jordan normal form is usually avoided in numerical computations [24-25].
A new method is proposed to determine the dwell and average dwell time without calculating the eigenvalue, in this paper. The proposed method depends on the
This paper is structured as follows: In Sec. 2, preliminaries are given. In Sec. 3, the dwell time and average dwell time for GAS are determined. Finally, numerical examples are given in Sec. 4.
2 Preliminaries
2.1 Criterions of global asymptotic stability
Let
The differential equation system (2) is stable if for any
If the real parts of all eigenvalues of the matrix A in the system (2) is less than zero, then the matrix A is called a GAS matrix and the system (2) is also called a GAS system. This criterion is known as the “spectral criterion” in the literature [26-31].
Lyapunov theorem, another criterion for GAS, is as follows.
“The matrix A (trivial solution of the system (2)) is GAS if and only if there is a solution
It means that if such H does exist then all the eigenvalues of matrix A lie strictly in the left-hand half-plane [26-30].
2.2 Global asymptotic stability parameter
As it is known, the eigenvalue problem is an ill-possed problem [23-25]. Therefore, instead of calculating eigenvalues, it should be preferred to study with parameters revealing the quality of the GAS.
GAS parameter of the system (2) is represented by
where
is the solution of Lyapunov matris equation,
is the spectral norm of the matrix A and
Now let’s consider the matrices
and
and illustrate that the parameter
matrix A1 + B is GAS, while A2 + B is not GAS.
As can be seen, while eigenvalues do not give an idea about the quality of GAS of a matrix, the parameter
Now, let’s give the upper bound of the matrix
Theorem 1. The following inequalitiy
2.3 Switching graph for switched linear differential systems
Let
The concepts to be used for the
3 Determination of dwell time for GAS
Let us give the following theorem, which gives the upper bound of the solution of the system (1) to use determining the dwell time for GAS.
Theorem 2. The following equation is provided for the GAS matrix Ap (p = 1,2,…,N) where x(t) is the solution of the system (1):
where
Proof. Let the system (1) be given with GAS matrices Ap (p = 1,2,…,N). The solution of system (1) is expressed as
or
where x(0) = x0 is the initial value of the system (1). By taking the norm of the solution (7) and applying the triangle inequality, the following inequality is obtained
If we use inequality (3), the upper bound of the solution is obtained as:
Therefore,
holds.
Theorem 3. The switched system (1) given by (4) is GAS for dwell times that provide the inequality
Proof. Suppose that
Let α be the weight of the walk Wn for the weight function
Let take us
and
So, we can write (6) by the equation
By taking
for the walk Wn . Since
Theorem 4. The switched system (1) given by (5) is GAS for average dwell times that provide the inequality
Proof. Assume that
Consider Wn as the walk for the weight function
using assumption
If
Since
Let define us
Since
4 Numerical examples
In this section, we give some numerical examples showing the efficiency of the results in Sec. 3.
Example 1. Let us consider the following system consisting three GAS subsystems:
Let


For the graph
Example 2. Let us consider the systems (1) with four GAS subsystems. For
For systems (1), the switching graphs

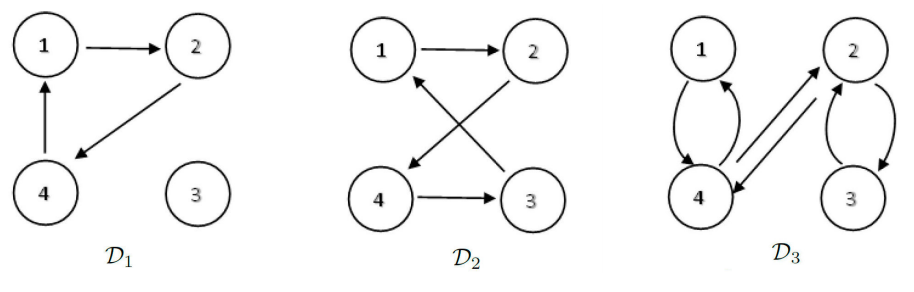
Figure 4 Switching graphs of the linear switched systems (1) consisting of four subsystems with A1, A2, A3, and A4.
In Table I, computed dwell and average dwell times for the switching graphs
Table I Dwell and average dwell times for switching graphs of the linear switched systems (1) consisting of four subsystems with A1, A2, A3, and A4.
As illustrated in Table I, for
5 Conclusion
In this paper, dwell and average dwell time, which make differential equation systems (1) GAS, are calculated in terms of the

