











 text new page (beta)
text new page (beta) English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkPACS: 02.40.Hw; 02.40.-k; 45.20.-d
1. Introduction
Recently the physics of particles and fields in curved surfaces in Euclidean space has become subject of interest, because many phenomena are reduced to one of them. For example, it is known that a liquid crystal on curved surfaces, look for smectic phases as parallel curved surface1. We also know, that some electronic properties of certain two-dimensional materials, are explained modeling particles, living in the surface, satisfying the Schrödinger or the Dirac equation2. Topological defects on surfaces3, relativistic particle dynamics4, and diffusion on surfaces5 are also some examples of how the interaction of particles and fields with surfaces through geometry, can be used to model several natural phenomena. Although from a mathematical point of view, variational problems related to curves and surfaces, has been addressed6, they have recently attracted attention, because has been possible to interpret the Euler-Lagrange equations in physical terms, as a balance of internal forces and moments, see e.g.7 and8.
Inspired by a recent formalism developed to investigate properties of elastic curves constrained on surfaces9, in this work we obtain the basic, but generic, geometric elements of particles constrained on surfaces. Although it is well known the classical physics of particles, usually specific cases of particles moving on surfaces are solved. Here we present its description in terms of the geometric information of the surface, either intrinsic through the gaussian curvature or extrinsic information, encapsulated in the second fundamental form.
We obtain, aside to the equations of motion, the constraining force on the particle. The corresponding equations of small perturbations are also obtained, showing that they includes, even with no external forces, extrinsic information. Some general results if the surface has axial symmetry and the gravitational field taken into account are showed.
2. Lagrangian Classical Mechanics
Let us consider the action of a free particle, constrained on a surface through the vector Lagrange multiplier
Here
After integration by parts in the first term, the corresponding Euler-Lagrange equations are given by
Moreover, variation respect to the local variables,
where
and the equation for the constraint is obtained.
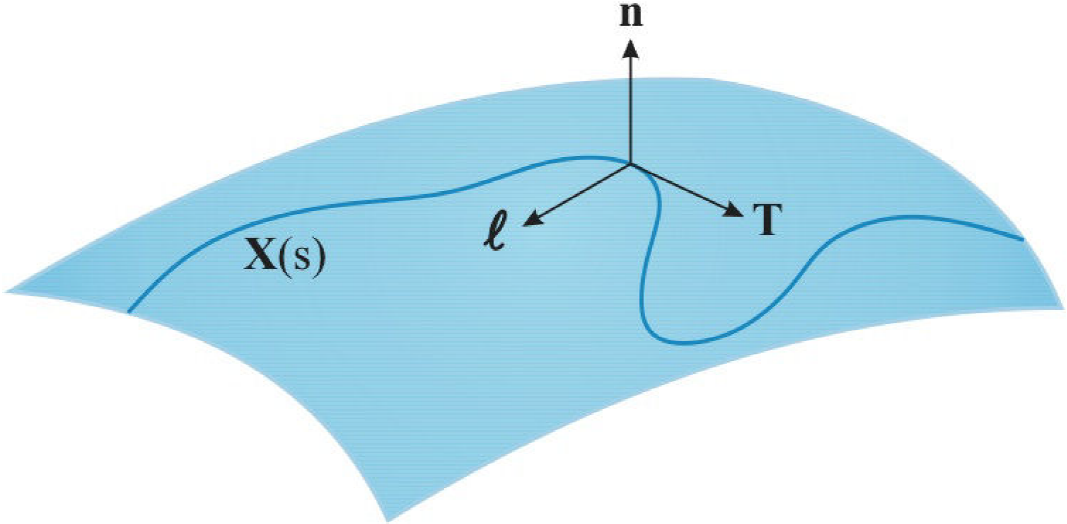
However, the Eq. (3), in not useful in this form. Instead, we write it in the Darboux frame
We also consider that the constraint does not depend on time, then the velocity of the particle is given by
where
The second derivative can be obtained from
In the first term we can get
in the second line, the second fundamental form of the surface
where
We can write this force in terms of the principal curvatures
where, as usual,
If there is an external force F, acting on the particle, we can decompose the equation of motion in the local basis and we can write
such that, the corresponding equations to solve are then given by
and the energy is conserved,
i.e. the force
This is a remarkable expression, which tell us that, in order that the constraining force vanishes, the ratio of non-tangential components of the external field must be equal to the ratio of the curvatures of the surface.
2.1 Perturbative expansion
To first order the Newton law (3) is given by (if the external force is a constant, e.g the gravitational field)
where the deformations are along the surface,
Then, since the energy is conserved, we see that
Thus we have that
If there is no external potential then
Therefore, with no external forces the tangential deformation of geodesics is a rigid translation,
In order to obtain
When projected into the tangent direction, the second term of the last equation is identically zero, as a consequence of the antisymmetry of the Riemann tensor. From Eq. (17) and (20), we can find
Since on two dimensional surfaces
where
Therefore to first order, the Newton law (3) implies that the constraining force along the perturbed path is given by
Whereas the transversal projection implies that
We see that it involves not only the transversal deformation
and
where we have defined
2. 2. Geodesic trajectories
On perturbed geodesic curves, the deformation on the constraining force, is given by
Without external forces it simplifies such that
Besides intrinsic information, projections of the second fundamental form appear in this equation. Even without external forces, extrinsic information are required,
A simple example is given by a particle falling on the unit sphere, starting from rest at the north pole, under the gravitational field. Since
Nevertheless, we note that a first integral is,
2.2.1 Axisymmetric surfaces
If the surface has axial symmetry, we can parametrize it in the form
The infinitesimal element of distance is given by
The unit normal is then
The second fundamental form K ab has components,
and
The principal curvatures are found to be
and
With these basic elements we can describe a particle restricted to lie along this surface. Because the symmetry under rotations about the z axis,
The normal curvature along the trajectory is given by
This equation can be written in terms of M
z
. In the first term we can use Eq. (36), in the second one we can use the induced metric on the surface, to obtain a first integral of
where
Then we can write the normal curvature of geodesics
and therefore, the force
The velocity v(t), is determined by conservation of the energy
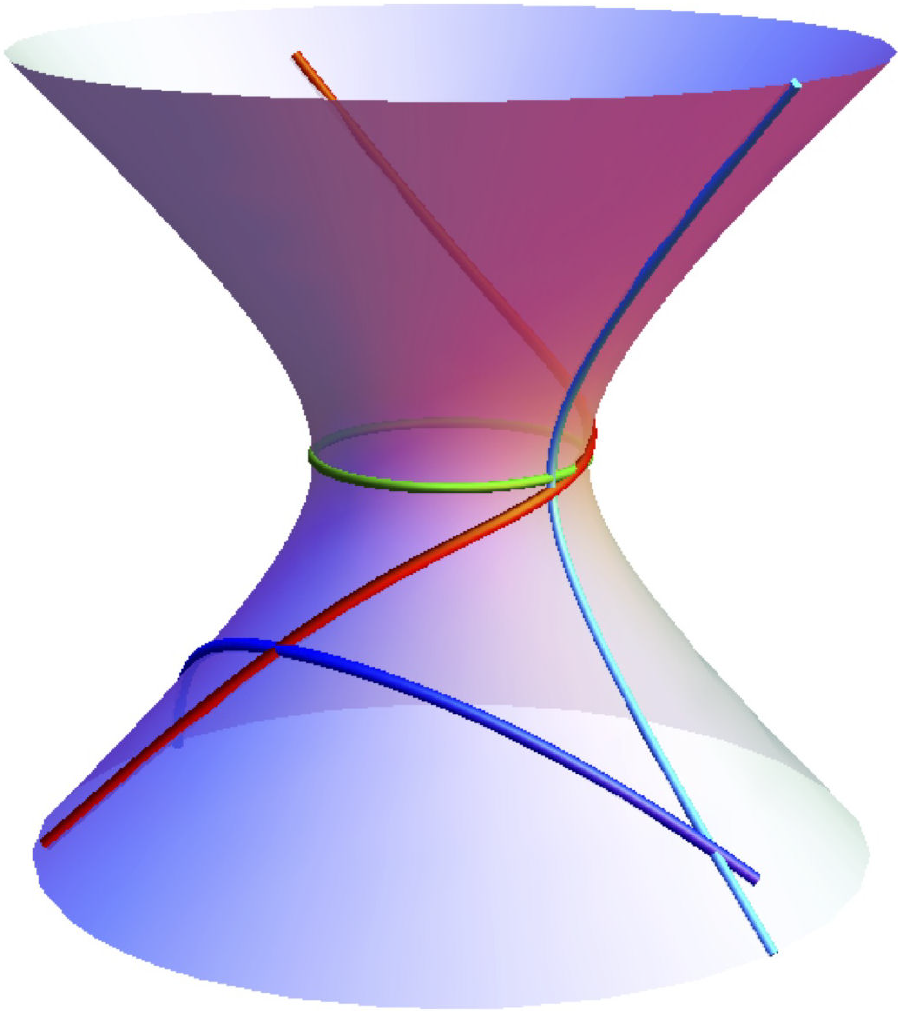
An example is the catenoid, a minimal surface that we can parametrize through
where
The curvature
An easy example is a particle falling along a meridian starting at l
0, and
If the particle leaves the catenoid at l
s
, then
Being
2.2.2 Particle on a surface in a curved space
If the particle moves onto a surface embedded into a curved space, with coordinates
The first term involves the background metric,
where the Christoffel symbols compatible with
where
In this case the second fundamental form
It is certainly interesting to know the effect of nontrivial background, that we will present in future work.
3. Summary and conclusions
In this paper we have presented the geometric elements in the description of particles on surfaces. Projection of the Newton second law along the normal to surface, gives the constraining force, that involves the normal curvature of the surface. Geodesic curvature (times v 2) gives the acceleration in the transversal direction to the movement. Classical perturbations of the path is equivalent to a field theory on curved surfaces. We show that from conservation of energy, a first order equation of the tangential deformation, is obtained. We also show that the equation of the transversal perturbation follows a Raychaudhuri-like equation that includes extrinsic information even if there is not external forces. If the particle moves onto a surface with axial symmetry, the results are parametrized in terms of the conserved projection of the angular momenta. The particular results in the case of geodesic curves are obtained. Using the formalism here presented, a problem to be addressed, is related to the motion of extended objects on surfaces, for elastic curves, the model must include the bending energy, quadratic in the curvature which has been extensively examined13.

