












 (pdf)
(pdf)




 SciELO
SciELO  SciELO
SciELO 
 Permalink
Permalink
La investigación arqueológica en sitios de alta profundidad
La historia de la investigación arqueológica en sitios de alta profundidad en el mundo no es muy antigua ni tampoco muy extensa. Esto se debe principalmente a que, recientemente, los recursos académicos, tecnológicos y económicos para acceder a todos aquellos sitios, así como los que se encuentran más allá de los límites del buceo deportivo y profesional -en profundidades de más de 100 m- o en zonas muy lejanas a los límites territoriales, y en muchos casos en aguas internacionales, eran de carácter prohibitivo. En este documento el término offshore se referirá al área de alta mar más allá de las aguas territoriales -a más de 12 millas náuticas de la costa- internacionales. Debido a que el desarrollo de dichos recursos académicos, esenciales para estudiar y entender estos sitios, están basados en los resultados de exploración y acceso a los sitios, esta experiencia no era posible de acumular de forma sistemática hasta hace unos cuantos años atrás, a finales de la década de 1980. Casi cien años después de la introducción de la arqueología como disciplina científica en el mundo y prácticamente veinte años después del desarrollo de la arqueología marítima. De modo tal que la exploración arqueológica en sitios de alta profundidad ha estado condicionada, de manera oportunista, a misiones y exploración en las zonas abisales de los océanos con motivos alternos al estudio enfocado del pasado humano.
Puede ser que el descubrimiento del RMS Titánic en la zona abisales del océano Atlántico, a más de 4 000 m de profundidad sea uno de los sucesos más famosos en la historia de exploración oceánica, pero como ya lo ha confesa do abiertamente Robert Ballard en numerosas ocasiones, el hallazgo sucedió de forma fortuita como resultado de ejercicios navales de la armada estadounidense en la década de 1980 (Ballard y Archbold 1987). A pesar de la fama del sitio éste nunca ha sido estudiado de forma específica desde el punto de vista arqueológico y, pese a ello, el sitio ha sido visitado en numerosas ocasiones por compañías privadas de salvamiento para y extraer elementos del pecio para su explotación comercial (Aznar y Varmer 2013). De modo que el primer sitio de alta profundidad estudiado de forma arqueológica fue aquel dirigido por Anne Marguerite McCann y Robert Ballard, en 1989, en las profundidades abisales del banco de Skerki (aproximadamente 850 m de profundidad) localizado en el Mediterráneo Central, entre Sicilia y Cerdeña, (Ballard et al. 2000 y Singh et al. 2000).
El proyecto tenía como principal enfoque la prospección arqueológica de pecios de la época romana en el área. El éxito del proyecto generó el interés suficiente para que, en 1997, el mismo equipo, en esta ocasión a bordo del submarino nuclear NR-1 de la armada estadounidense ayudó a prospectar el área de manera más detallada mientras que ROV eran lanzados desde el buque oceanográfico de investigación para mapear y muestrear los sitios arqueológicos utilizando por primera vez robótica marina en la investigación arqueológica (McCann y Oleson 2004). No obstante, los avances tecnológicos utilizados en proyecto en el banco de Skerki el registro arqueológico y de geofísica marina no contaba con el poder de procesamiento ni la tecnología digital actual y éste se realizó de forma análoga en papel. Por ejemplo, los fotomosaicos de los sitios eran realizados con equipo análogo donde los negativos, que se revelaban a bordo del submarino pues éste contaba con un cuarto obscuro, se imprimían en una mesa grande y los arqueólogos se reunían armados de tijeras y pegamento para componer los fotomosaicos de forma manual a bordo del submarino nuclear (comunicación personal Jon Adams).
El rápido desarrollo tecnológico, desde la década de los noventa hasta hoy, ha permitido que la investigación arqueológica bajo el agua se realice con mayor frecuencia, generando una mayor cantidad de información relevante para el registro arqueológico. Esto no sólo ha incrementado la velocidad de adquisición, sino también el nivel de detalle del registro arqueológico. Algunos proyectos de investigación en aguas de alta profundidad se realizaron de manera similar al proyecto inicial del banco de Skerki en las costas turcas del mar Negro dirigidas por Robert Ballard (Ballard et al. 2001 y Brennan et al. 2013). Sin embargo, no fue sino hasta 2014 que por primera vez se realizaba un proyecto arqueológico que tenía como objetivo entender la evidencia de las actividades marítimas humanas de larga, mediana y corta duración histórico temporal y espacial. El proyecto de Arqueología Marítima del Mar Negro (Black Sea MAP) tuvo como principal objetivo explicar los cambios del paleo-paisaje marítimo desde el último periodo glacial (aprox. 22 000 AP) hasta la Revolución Industrial y su diferente repercusión reflejada en la evidencia arqueológica al utilizar lo último en tecnología de punta marítima y en análisis arqueológico (Adams et al. 2017, 2016).
Este artículo está enfocado en describir algunos de los sitios más relevantes que demuestran el uso de la metodología de altas profundidades en el estudio arqueológico del Black Sea MAP. El ensayo también describirá el modelo de colaboración del Black Sea MAP entre la industria y la academia, así como dos proyectos de investigación generados a partir de este modelo como lo es el Programa de Investigación en Arqueología de Profundidad (OAR). El primero, el estudio arqueológico de una de las embarcaciones del siglo XVI, que se encuentra en un estado de conservación excepcional en el mar Báltico y, segundo, el hallazgo de un submarino alemán de la Primera Guerra Mundial como resultado de este modelo de colaboración.
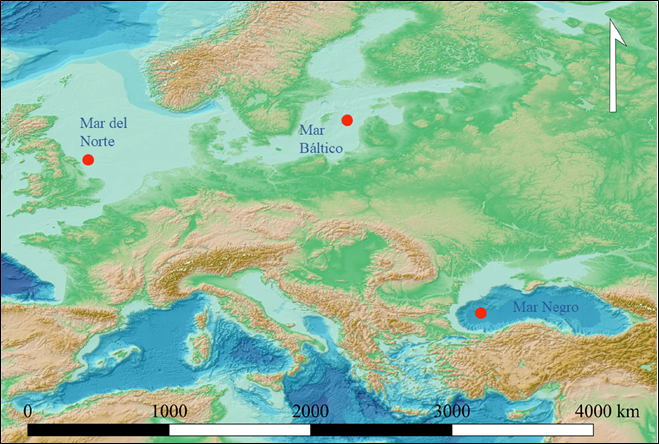
Todos los sitios considerados en este artículo (Figura 1) han sido estudiados siguiendo como base de código de prácticas profesionales y científicos de la convención de la UNESCO sobre la protección cultural de sitios arqueológicas sumergidos, publicada en 2001, el cual ahínca la importancia del estudio científico de los sitios arqueológicos, el acceso público a la información recuperada, la protección y conservación in situ, y la lucha en contra de la comercialización por medio de compra o venta de cualquier elemento arqueológico hallado bajo el agua. Demuestra que dicha colaboración es posible y que el estudio arqueológico bien financiado puede y debe seguir los lineamientos de la UNESCO y de los principios científicos de la práctica en la investigación arqueológica.
Robótica submarina y tecnología de punta en la arqueología marítima de alta profundidad
Realizar estudios arqueológicos en sitios conocidos y de fácil acceso es, en muchas ocasiones, una tarea extremada mente compleja que requiere un alto nivel de organización, apoyo institucional, financiamiento público o privado y preparación profesional del equipo de trabajo. El traslado al sitio de miembros del equipo, alojamiento en el lugar de estudio y el mantenimiento de cualquier infraestructura temporal o permanente es una de las tareas más laboriosas del proceso de investigación arqueológica, pero también clave para el estudio adecuado y científico de cualquier sitio ya sea en tierra o bajo el agua. Cualquier proyecto arqueológico o científico que no considere detenidamente alguno de estos elementos tiende a encontrar complicaciones logísticas que, a corto y largo plazo, afectan la calidad de la información recabada en campo y como consecuencia la validez de los resultados académicos.
Vehículos de Operación Remota (ROV)
Para poder estudiar los sitios arqueológicos a profundidades de más de 100 m es necesario la utilización de un Vehículo de Operación Remota (Remotely Operated Vehicle o ROV por sus siglas en inglés) diseñados para soportar el estrés físico y mecánico ejercido en los componentes mecánicos y electrónicos y funcionar de forma adecuada una vez en el sitio de interés. Los ROV son vehículos controlados desde la superficie, ya sea desde una plataforma o una embarcación. En términos más simples, los componentes del ROV se pueden distinguir por la capacidad de poseer un sistema de lastre y de propulsión independiente a cualquier otra infraestructura ya sea una plataforma o una embarcación. También cuentan con la capacidad de poder comunicarse vía cable umbilical a la superficie. Es decir, que el centro de control de los ROV sucede, como su nombre lo indica, de forma remota. En la actualidad existen una gran cantidad y variedad de ROV utilizados de forma regular en arqueología (Ballard et al. 2001; Ward y Ballard 2004; Ward y Horlings 2008; Brennan et al., 2013). Dichos sistemas suelen ser producidos de manera comercial, y es posible adquirir estos vehículos en sus versiones más sencillas para realizar inspecciones arqueológicas en sitios someros desde una embarcación o desde tierra. De hecho, estos modelos son de gran utilidad y han sido empleados en numerosos proyectos arqueológicos para trabajos de investigación. Sin embargo, carecen de las capacidades técnicas para explorar a más de 300 m de profundidad. Como se ha mencionado, la profundidad afecta los componentes de los vehículos y para que estos puedan ser utilizados a mayores profundidades, necesitan contar con certificados de operación y estar diseñados para soportar el aumento de presión en sitios a más de 300 metros. Para evitar daños en los componentes mecánicos debido a la alta presión en grandes profundidades, estos vehículos están diseñados para mantener la misma presión que en la superficie. Esto se logra sumergiendo los componentes en un sistema hidráulico. De esta forma, los circuitos y componentes electrónicos permanecen en un ambiente estable, lo que permite su funcionamiento seguro incluso a grandes profundidades.
Al utilizar sistemas hidráulicos complejos, es posible diseñar herramientas para trabajos pesados, como dragas de agua para excavaciones arqueológicas, como veremos más adelante. Los ROV no solo están diseñados para operar a grandes profundidades, sino que también son de mayor tamaño y funcionan a altos voltajes (4 160 VAC). Esto significa que prácticamente cualquier equipo de geofísica marina puede montarse en el vehículo, junto con una cantidad casi ilimitada de cámaras de video, tanto de definición estándar (SD) como de alta definición (HD). Adicionalmente, se pueden instalar equipos de ultra alta definición fotográfica (UHD) y herramientas arqueológicas, como dragas de agua y manipuladores kinesiológicos (controles que transmiten, por medio de fibra óptica, el movimiento de la mano del operador a los manipuladores en el ROV) de trabajo que toman la fuente de poder directamente del ROV.
El ROV requiere de comunicación por vía de un sistema umbilical o Sistema de Manejo de Atado [Tether Management System o TMS por sus siglas en inglés] que no sólo alimenta de electricidad al ROV desde la embarcación, sino que también conecta por vía fibra óptica las cámaras a una velocidad de 960 mega bytes por segundo. Esto es esencial en exploración en aguas profundas ya que la señal recibida por los pilotos de ROV en la embarcación es prácticamente instantánea a profundidades de más de 2 000 m de profundidad.
De manera tradicional, la investigación de sitios arqueológicos someros está basada en la prospección acústica del lecho marino por medio de sistemas de sonar de barrido lateral (SSS) y sistemas de ecosonda marina de haz múltiple (MBES). En el caso de los sensores MBES estos se encuentran montados en el casco de la embarcación o buque de investigación y en el caso del SSS el equipo tiende a ser remolcado. Ambos sistemas están diseñados para reflejar el regreso acústico del lecho marino y crear, en el caso del MBES un levantamiento en 3D y en el del SSS un levantamiento 2D del lecho marino (Bowens 2009).
Montar dichos sistemas en un buque de investigación ofrece varias ventajas. En primer lugar, el equipo está directamente conectado al sistema de adquisición, lo que simplifica la operación y reduce costos al no requerir infraestructura ni equipo adicional entre el sensor y el sistema de captura.
En segundo lugar, el cálculo de la ubicación de los sensores es relativamente menos complejo, no solo en términos geográficos, sino también en cuanto a su posición en los planos horizontal y vertical. Esto se determina por medio del posicionamiento basado en la información adquirida del Sistema Global de Navegación Satelital (GNSS) y la unidad de medición inercial [Inertial Measuring Unit o IMU por sus siglas en inglés], los cuales se encuentran tradicionalmente montados en el buque de investigación.
En el caso del MBES el posicionamiento solo requiere del cálculo de la compensación entre el datum del buque y el centro del sensor de MBES. Los mismos pasos son necesarios para conocer la posición del SSS con el paso adicional de calcular la distancia y profundidad entre la el datum del buque y el centro del sensor SSS.
La serie de pasos necesarios para conocer el posicionamiento absoluto de ambos sensores se le conoce como el procesamiento de navegación. Esto se realiza por medio de software especializado que combina los diferentes factores geoespaciales y estos se trasladan a la información recabada por los sensores de prospección marina.
Los buques de investigación en arqueología de profundidad
Cualquier prospección arqueológica de profundidad requiere el uso de robótica debido a las restricciones mencionadas. Asimismo, también requiere buques oceanográficos dedicados a albergar la infraestructura necesaria para la operación de dichos vehículos en alta mar. Desde 2003 la industria offshore y la académica han participado en numerosas colaboraciones que han permitido que la utilización de dichos equipos avanzados sea posible en la investigación arqueológica.
Inicialmente, la participación fue entre la compañía hidrográfica Marin Mätteknik AB MMT y el Instituto de Investigación en Arqueología Marítima (MARIS) de la Universidad de Södertorn en Suecia al cual se les unió después el Centro de Arqueología Marítima (CMA) de la Universidad de Southampton.
Como resultado del financiamiento de la Fundación para la Educación y Exploración [Education and Exploration Foundation o EEF por sus siglas en inglés] para realizar estudios en el mar Negro desde 2014 hasta 2019 a esta nueva asociación se le unió la Universidad de Connecticut en Estados Unidos y el Centro de Arqueología Marítima de Sozopol en Bulgaria (CUA).
Desde 2019 y por medio del financiamiento de la Fundación La Voz del Océano [Voice of the Ocean o voto por sus siglas en inglés] se creó OAR del CMA el cual ha continuado con el estudio del sitos de profundidad y de accesibilidad limitada.
Tres buques bajo contrato de largo plazo con MMT han sido utilizados para localizar, registrar y estudiar nuevos pecios en las profundidades del mar Negro y el mar Báltico así como en sitios en aguas no protegidas en el mar del Norte inglés: Stril Explorer en 2016 y 2019 (Figura 2), Havila Subsea en 2017 y 2020 (Figura 3) y Topaz Tiamat en 2020 (Figura 4).



Los buques están certificados como Buques de Abastecimiento de Uso Múltiple [Multi Purpose Supply Vessel o MPSV por sus siglas en inglés] y presentan capacidades automáticas de maniobra bajo un posicionamiento dinámico con doble redundancia [Dynamic Positioning o DP2 por sus siglas en inglés], utilizadas en la industria offshore para realizar tareas de alta precisión en condiciones de mar extre mas. Por medio del sistema DP2 los buques pueden mantener una posición sin anclaje con 10 cm de error en oleajes de altura máxima a los 6 m de amplitud.
La metodología aplicada tanto en el mar Negro, el Báltico y en el mar del Norte, salvo algunos cambios en los sistemas fotogramétricos, fue la misma en todos los casos (Figura 5). También cuentan con la capacidad de albergar un total de 25 miembros del equipo científico a bordo por más de un mes de operaciones, la instalación de laboratorios de conservación y análisis de material arqueológico recuperado (Figura 6), así como la infraestructura de computación necesaria.
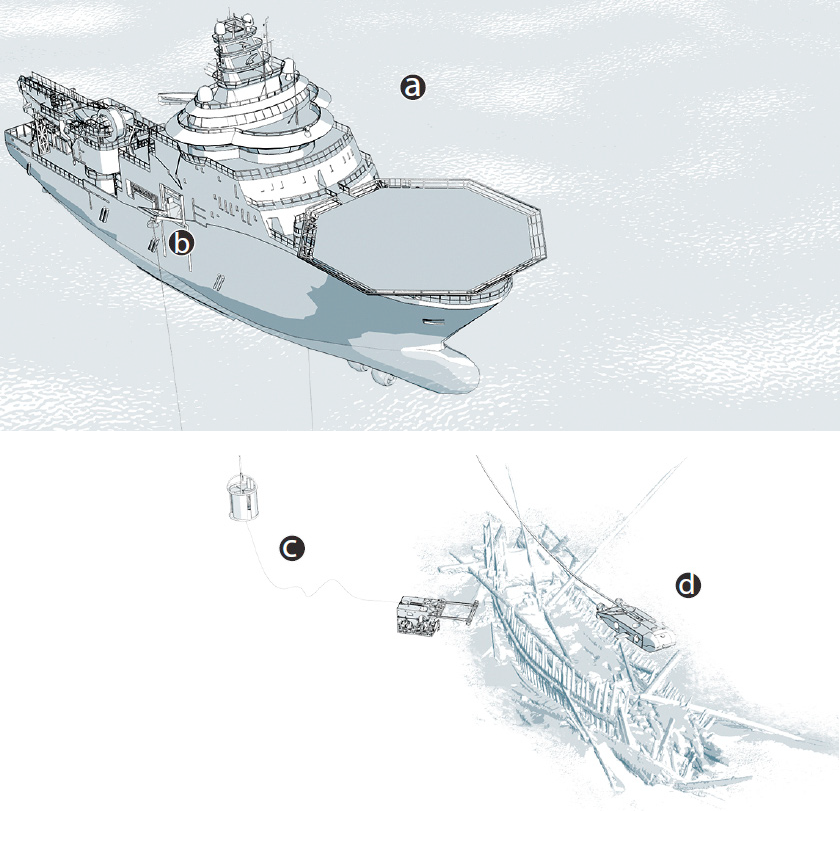
Imagen del autor.
Figura 5 Vista esquemática de la operación con sistemas ROV en sitios de profundidad. A) El buque mantiene la posición utilizando el sistema de DP2. B) Los equipos son lanzados por la borda con sus respectivos sistemas de lanzamiento. C) El sistema TMS mantiene la posición del ROV a profundidad. D) Los equipos realizan la prospección de alta precisión a profundidad.

El posicionamiento y precisión en altas profundidades
Debido a las limitaciones del cuerpo humano en sitios de profundidades de más de 140 m, es necesario contar con el uso de robótica avanzada para poder visitar aquellos sitios arqueológicos que se encuentran fuera de nuestro alcance usando métodos tradicionales. Sin embargo, a través de sensores y elementos mecánicos, es posible el estudio de dichos sitios con gran precisión y tiempo casi ilimitado de inmersión. Para poder interpretar la información recopilada por estos equipos es fundamental que cuenten con un sistema de posicionamiento avanzado y preciso. A diferencia de los sitios terrestres, en donde el uso de sistemas digitales de posicionamiento por medio de cualquiera de las constelaciones dentro de los GNSS ya sean Global Positionining Systems (GPS) o Globalnaya Navigazionnaya Sputnikovaya Sistema (GLONASS) sólo requieren de un cielo libre de obstrucciones para comunicarse con la red satelital directamente; bajo el agua es necesario transmitir dicha señal a los sistemas por medio de señales acústicas adicionales. Debido a que la señal satelital solo logra penetrar los primeros metros de la superficie oceánica es necesario transmitir la señal por medio de sistemas acústicos. Mientras que la embarcación o plataforma recibe la señal satelital mediante antenas receptoras a cielo abierto, los sistemas acústicos de línea base a larga distancia (LBL) y línea base a muy corta distancia (USBL) se comunican con los equipos ROV por medio de receptores y transmisores que triangulan su posicionamiento relativo.
La posición absoluta de los sensores que se encargan de mapear los sitios bajo el agua es calculada por medio de la integración del posicionamiento satelital, el posicionamiento acústico y el movimiento dinámico de la embarcación y los sistemas ROV utilizando sensores de movimiento que miden, en tiempo real, el cabeceo, el balanceo y la guiñada de ambas plataformas conocidos como IMU.
En el caso de los sitios arqueológicos que se encuentran bajo cualquier cuerpo de agua, la calidad del posicionamiento es directamente proporcional a la profundidad de los sitios estudiados. La calidad de los sistemas de mapeo geofísico como son MBES, SSS y los sistemas de mapeo sísmico (SBP) dependen también de su distancia al lecho marino o sitio arqueológico. A mayor distancia del fondo marino menor es la calidad de la información recopilada y mayor es el error inducido por el cabeceo, el balanceo y la guiñada.
Los sistemas de mapeo para el estudio de arqueología marítima en sitios someros están tradicionalmente montados en el casco de la embarcación o buque de investigación, ya que normalmente se puede llegar a un compromiso entre la calidad del mapeo y la profundidad de los sitios sin una mayor pérdida de la calidad en la información recabada. Sin embargo, para poder alcanzar el detalle ineludible para comprender un sitio arqueológico en profundidades de más de 500 m es necesario montar los equipos en plataformas remotas como los ROV y de este modo llevar los sistemas directamente al sitio. Tanto en los sitios de altas profundidades como aquellos estudiados por el Black Sea MAP y el programa OAR se realizaron estudios arqueológicos de sitios entre los 90 m y los 2 300 m de profundidad utilizando robótica de profundidad y posicionamiento dinámico. Mientras los sistemas geofísicos de mapeo como el MBES, SSS y SBP requirieron de un posicionamiento como el descrito anteriormente, en los sitios de mayor profundidad los errores de posicionamiento eran demasiado grandes (5 m de error en los sitios más profundos) para entender la escala absoluta de los sitios, en particular los pecios, debido a la distancia entre transmisor (montado en el casco del buque) y receptor (montado en el ROV). Esto fue solucionado por medio de la ejecución de fotogrametría de alta-resolución ya que ésta no requiere de posicionamiento absoluto para producir resultados.
Existen dos clases de ROV utilizados por el Black Sea MAP y OAR. El primero, el WROV (Figura 7, vehículo diseñado para la industria de construcción de infraestructura bajo el agua. El segundo, el SROV (Figura 8) el cual está diseñado para la prospección de alta velocidad en la industria offshore. Ambos vehículos son utilizados de forma diferente y en momentos distintos de la investigación arqueológica de profundidad moderna. La velocidad y precisión del SROV lo convierte en la herramienta ideal para la prospección de grandes áreas de interés arqueológicas. Está diseñado para desplazarse a velocidades de 4-6 nudos -sin embargo, el récord de velocidad fue establecido por el Black Sea MAP en una prospección de 8 nudos- y cubrir una gran área con los múltiples sistemas de geofísica marina. Por otro lado, el WROV es el vehículo estándar en la industria offshore para la inspección y construcción. Sin embargo, adaptado para realizar trabajos arqueológicos este vehículo es ideal para realizar levantamientos fotogramétricos e inspecciones de ultra-alta definición ya que cuenta con una movilidad y agilidad superior a cualquier otro vehículo. A continuación, se describe con detalle que uso se les ha dado a estos vehículos durante el Black Sea MAP y los proyectos de OAR.

Fuente: Fotografía Jodi Hilton.
Figura 7 Shilling Robotics hd vehículo remoto de clase industrial (WROV) preparado por los ingenieros de MMT en una de las numerosas inmersiones en el mar Negro.

El mar Negro y la fotogrametría como herramienta ideal en altas profundidades
Durante las temporadas de 2016 y 2017 del proyecto del mar Negro se hallaron más de 65 nuevos pecios en aguas territoriales y de la zona económica de Bulgaria EEZ. Los sitios se encuentran en profundidades desde los 90 m en la plataforma continental del mar Negro búlgaro y hasta los 2 200 m en la zona abisal. Los diferentes sitios datan desde el más antiguo, fechado por medio de siete muestras de radiocarbono tomadas directamente del casco de la embarcación (Pacheco-Ruiz et al. 2019) del periodo Griego (500-400 aC), el periodo Romano (200-400 dC), Bizantino (siglo XII), Otomano (siglo XVI) y los siglos XIX y XX.
Mientras todos y cada uno de los sitios fueron mapeados utilizando MBES, SSS y SBP, el uso de la fotogrametría de alta calidad y vídeo de ultra-alta definición (UHD) fueron los métodos que permitieron un mayor nivel de detalle de los contextos arqueológicos. En particular, el uso de fotogrametría a profundidad fue de gran ayuda pues la producción de los modelos en tercera y cuarta dimensión no se ven afectados directamente por la profundidad y los errores de posicionamiento. Esto se debe a que para generar un modelo fotogramétrico de alta calidad se requiere principalmente de visibilidad adecuada y la captura de imágenes de alta calidad. El posicionamiento es necesario, pero secundario a la producción de modelos en contraste con los sistemas geofísicos que dependen de un posicionamiento más preciso.
Los sistemas de captura de imágenes utilizados por el equipo de investigación están basados en el sistema Cathx de captura de imágenes. Equipos fotográficos de alta calidad basados en los sensores Cathx A1000 Ivanoff y almacenados en un contenedor de titanio capaz de realizar capturas fotográficas hasta los 4 000 m de profundidad (Pacheco-Ruiz et al. 2019).
Montados en ambos el WROV y el SROV y con la capacidad de ser manipulados y configurados de manera remota por medio del umbilical de fibra óptica de los ROV el equipo fotográfico es capaz de tomar dos imágenes por segundo. En el caso del WROV la configuración de una cámara montada en un eje móvil es ideal para sitios que sobresalen a más de 1 m del lecho marino, como son los pecios de mayor tamaño y en mejores condiciones (Figura 9). En el caso de los sitios con mayor acumulación de sedimentos y de menor proyección del lecho marino se utilizó una configuración de “vuelo” con tres cámaras en dirección oblicua las cuales fueron utilizadas y montadas en el SROV con la finalidad de mapear dichos sitios (Figura 10). Esta configuración también permitió el uso de la captura de láser en 3D de los sitios menos sobresalientes con respecto al lecho marino y de esta forma combinar el levantamiento fotogramétrico y la nube de puntos capturada con el sistema láser de Cathx (Figura 11).
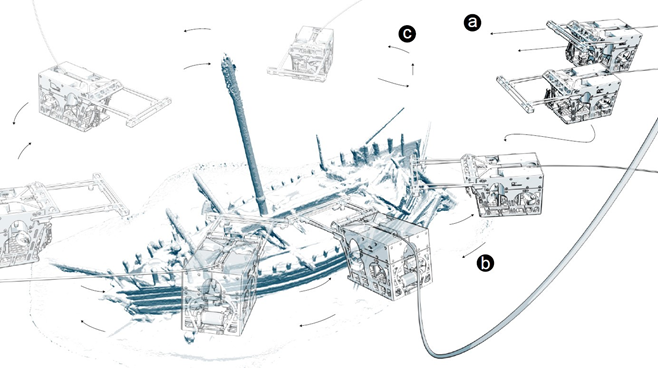
Figura 9 Método de prospección fotogramétrica en sitios sobresalientes del lecho marino: a) El vehículo alcanza la profundidad de prospección, b) El vehículo comienza la prospección base y c) El vehículo cubre los espacios necesarios y añade detalle.
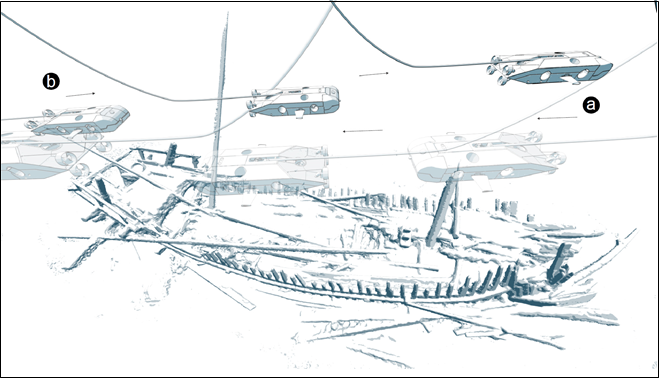
Figura 10 Método de prospección fotogramétrica, utilizando el SROV, en sitios más sedimentados y más someros con respecto al lecho marino: a) primer línea base de prospección y b) segundo “vuelo” añadiendo detalle al sitio.

Figura 11 Representación en 3D de los métodos utilizados en arqueología de profundidad en un pecio del periodo Medieval en el mar Negro Búlgaro. Fuente: Modelo basado en fotogrametría de alta calidad.
Durante las prospecciones fotogramétricas las cámaras Cathx capturaron imágenes de alta calidad en un intervalo de disparo de dos fotografías por segundo (2Hz) al mismo tiempo que se escaneaban los sitios con láser. Las imágenes capturadas se retroalimentaban por medio de fibra óptica al buque, y se realizaban cambios y ajustes necesarios de exposición y balance de color desde el centro de comando en el buque de investigación (Figura 12). Se tomaron un promedio de 7 000 imágenes por pecio y durante la captura también se imprimía, en la información de metadatos, la posición ya procesada junto con la información de las múltiples variantes con respecto a la relación de cada una de las cámaras con su altura, profundidad, el cabeceo, el balanceo y la guiñada -procesadas por medio de la IMU. Esto, una parte clave del proceso de alineamiento fotogramétrico ya que sin esta información el alineamiento no conoce dichas posiciones y el procesamiento se ayuda solamente de los píxeles en las imágenes. Con esta información en cada una de las imágenes el proceso del modelo en 3D es mucho más veloz y preciso (Pacheco-Ruiz et al. 2019).

La gran ventaja de este método está en que es posible jerarquizar qué información tiene mayor peso en la generación del modelo en 3D -si el posicionamiento o el alineamiento fotogramétrico-, lo cual no se puede realizar con los métodos de captura geofísica ya que estos dependen en su totalidad del posicionamiento del ROV.
En el caso de los trabajos de inspección y estudio de sitios de profundidad esto resulta en una tremenda ventaja para poder entender las proporciones de los sitios arqueológicos y también, como ya es sabido, contar con la ventaja de proporcionar un nivel detallado a los sitios utilizando dicho método (Figura 13).
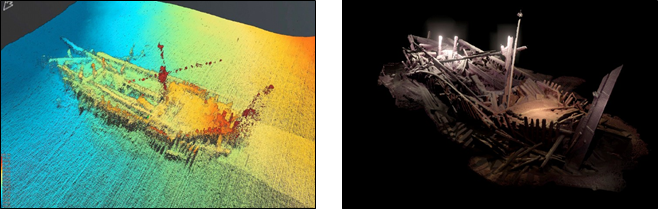
Figura 13 Comparación entre los resultados de dos técnicas de prospección diferentes (MBES y fotogrametría) montadas en ROV en un sitio de alta profundidad en el mar Negro: a) Imagen de un pecio en el mar Negro fechado hacia el Periodo Otomano (siglo XVII) y mapeado utilizando sistemas de prospección de geofísica marina MBES a una profundidad de 320 m, fotografía Black Sea MAP y b) el mismo pecio mapeado utilizando fotogrametría de alta resolución. Cabe destacar el nivel de detalle y la ventaja de una textura que ayudan a entender el sitio de una mejor manera
Documentación en 4D
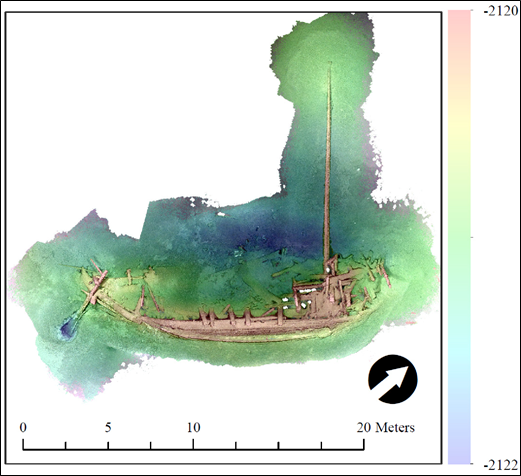
Durante la exploración de los numerosos sitios en el mar Negro se realizaron excavaciones de sondeo para entender aspectos diagnósticos para el fechamiento relativo más preciso de los sitios arqueológicos. En el caso de la embarcación con mayor profundidad (2 122 m) (Figura 14) y también la de mayor antigüedad (410-370 calibrado aC).
Fuente: Black Sea MAP.
Figura 14 Plano fotogramétrico de un pecio, hallado en el mar Negro y fechado a principios del siglo IV aC, y representado como modelo digital de elevación a partir del registro fotogramétrico y ortofotos producidas con el uso de robótica de profundidad.
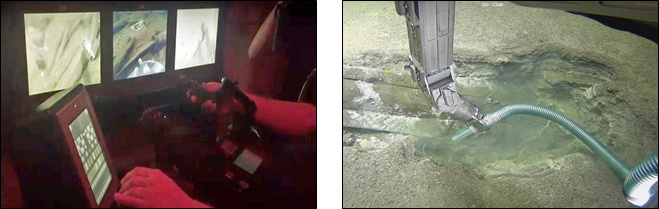
Se realizó una excavación, de la embarcación del siglo IV aC, utilizando ROV y coordenadas desde el buque por medio de los controles de reacción kinesiológicos como lo fue la draga diseñada para la excavación arqueológica montada en el ROV (Figura 15).
Fotografía: Black Sea map.
Figura 15 Visualización detallada de la operación en tiempo real de una excavación robótica en el mar Negro a una profundidad de 2 122 metros: a) demostración del uso del brazo kinesiológico (mano derecha del piloto) desde el centro de comando en el buque investigación y b) el manipulador robótico de titanio TITAN4 recibiendo el movimiento preciso del operador por medio de fibra óptica el cual opera la draga de excavación a más de 2 000 m de profundidad.
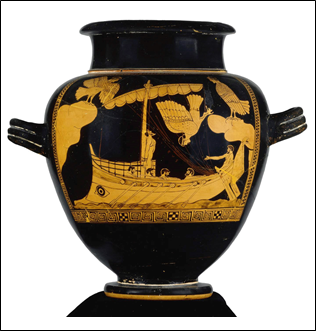
El pecio mostró una gran semejanza con la iconografía griega de contextos terrestres y un poco más tardía (siglo V aC). Tales ejemplares se encuentran plasmados en algunos artefactos de la misma época como lo es “La Vasija de la Sirena” de las colecciones en el Museo Británico (Figura 16).
Fuente: The British Museum.
Figura 16 Vasija de La Sirena, fechado hacia el siglo V aC. La embarcación es muy similar al pecio encontrado en el mar Negro (véase Figura 14).
La excavación arqueológica fue registrada por medio de cámaras de vídeo de alta resolución HD y con el uso de fotogrametría antes y después de la intervención. Método que se ha utilizado con excelentes resultados, previamente, en las excavaciones en sitios más someros como en el asentamiento costero de Ropotamo en Bulgaria (Pacheco-Ruiz 2017) y, posteriormente, en el sitio de Gribshunden en Suecia (Rönnby 2021).
El pecio del siglo IV aC se mapeo utilizando dichos métodos y gracias al posicionamiento de alta calidad generado por el alineamiento fotogramétrico y con la ayuda de la información derivada del MBES se compararon ambos resultados utilizando sistemas de información geográficos en donde fue posible calcular el volumen de sedimento removido en el sitio a manera de registrar el impacto arqueológico (Figura 17).
Fotografía Black Sea map.
Figura 17 Resultado del análisis 4D de la excavación a profundidad de la embarcación griega del siglo IV aC: a) modelo fotogramétrico preexcavación del timón del pecio, fotografía Black Sea MAP y b) resultado de la comparación, por medio de GIS, del modelo pre y post excavación en el que los colores indican el volumen de sedimento retirado del sitio por medio de la draga de agua montada en el WROV.
La metodología en 4D utilizando fotogrametría de alta resolución fue una herramienta esencial para estudiar los sitios profundos. Ésta permitió generar bases de datos e información con un mayor nivel de calidad en el contenido de información arqueológica. En sitios de alta profundidad en donde el posicionamiento bajo el agua tiende a presentar un error mayor, que en sitios más someros debido a la distancia de los transductores y receptores USBL, el uso de imágenes que dependen menos de la precisión de la navegación es esencial para entender el detalle y la complejidad de los sitios arqueológicos. Por lo tanto, la generación de modelos fotogramétricos de alta resolución permite documentar de manera mucho más precisa la intervención arqueológica en sitios de alta profundidad.
El estudio de sitios de acceso limitado y la colaboración con la industria offshore en el mar Báltico
Cuando el Black Sea MAP finalizó en 2018 se creó un programa de la Universidad de Southampton OAR el cual se especializó en la investigación de sitios de difícil acceso con la finalidad de estudiar dichos sitios utilizando lo último en tecnología en exploración oceanográfica. El programa es una colaboración con la industria offshore que se enfoca en explorar aquellos sitios identificados en el desarrollo de la infraestructura ubicada en sitios fuera de la protección del litoral (mayor a las 24 millas náuticas de la costa).
Durante trabajos de exploración en el mar Báltico, en 2009, se documentó utilizando MBES y SSS, una anomalía identificada como un pecio por la compañía hidrográfica MMT (Figura 18). Sin embargo, no fue sino hasta 2019 que, durante la prospección para la instalación de infraestructura del gaseoducto en el área, por parte del proyecto de Nord Stream 2 que este pecio fue investigado a detalle. Durante la inspección por medio de WROV del pecio, a una profundidad de aproximada de 140 m y en aguas internacionales se identificó como una embarcación de finales del siglo XV y principios del siglo XVI (Adrain, Alebouyeh y Hermansson 2019).
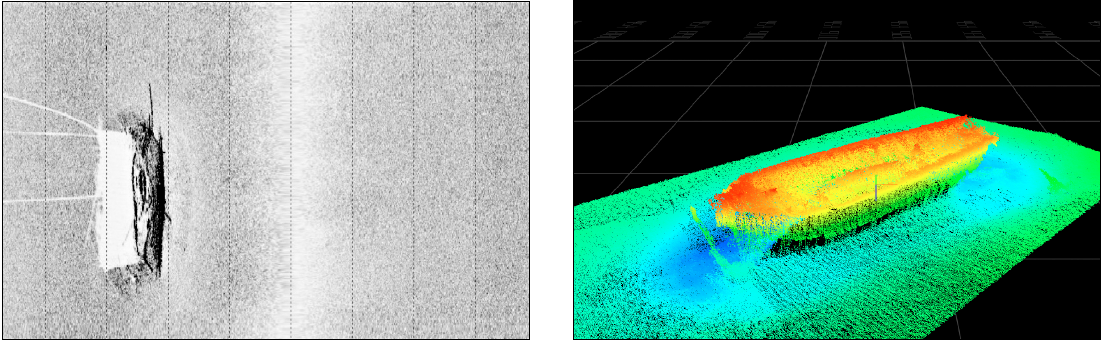
Fuente: Fotografías MMT.
Figura 18 Imágenes de la inspección preliminar a cargo de MMT durante la campaña de mapeo en 2009: a) Sonar de barrido lateral (SSS) de la embarcación descubierta por MMT en el mar Báltico y b) Ecosonda Multihaz (MBES) de la embarcación descubierta por MMT en el mar Báltico.
Debido a las excepcionales condiciones de conservación en el mar Báltico, su profundidad y la localización alejada de la intervención humana, el sitio se ha mantenido casi intacto alrededor de 500 años. La embarcación de madera tiene de unos 17 m de eslora y presenta, en ambas bandas, la estructura del casco intacta desde la quilla hasta la regala (Figura 18).
Tres líneas paralelas de cintas que ensanchan la cintura de la embarcación y muy características de los navíos representados en la iconografía del siglo XV (Figura 19b) pueden ser observadas en el pecio (Figura 20a), Así como la forma redondeada de la popa donde la tablazón sube hacia la terminación del codaste en donde éstas se encuentran aún en ambas aletas bajo el yugo (comparar Figura 19b con la Figura 20b).
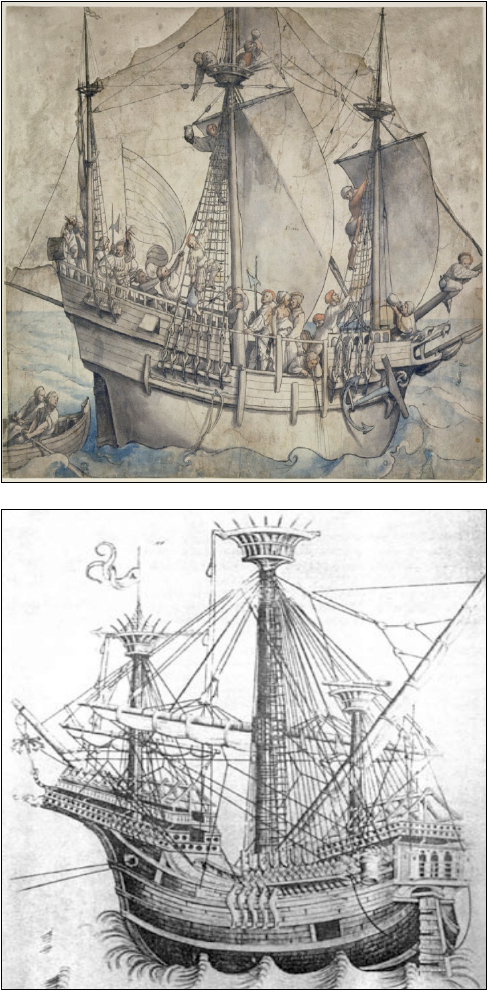
Figura 19 a) Hans Holbein D. J. Marinos, mercenarios y el sheriff en la nave, ca. 1532-1533 y b) Nave del siglo XV de tres palos por el maestro flamenco W.A. (después de Friel 1994).
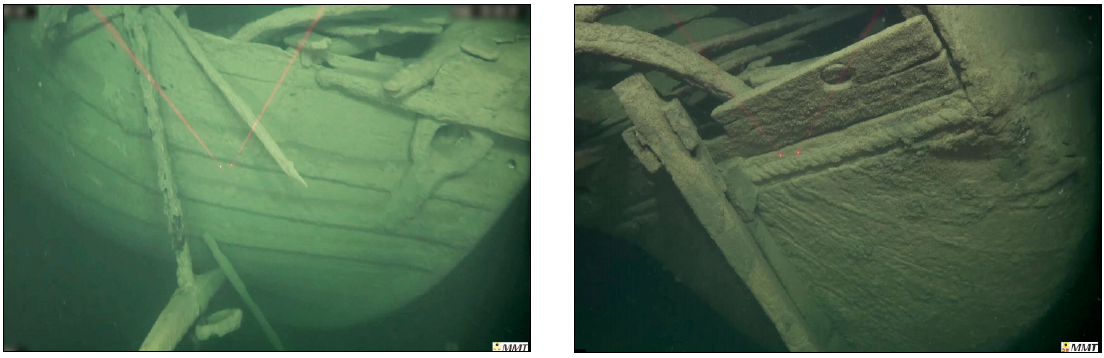
Fuente: Fotografías MMT.
Figura 20 Porción de la amura de estribor del pecio en donde se puede apreciar el trío de cintas a lo largo de la embarcación: a) porción de la amura de estribor del pecio en donde se puede observar el trío de cintas a lo largo de la embarcación y b) detalle de la aleta de estribor en donde se puede distinguir la curva del entablado hacia la parte inferior del yugo y un remate decorado en forma de cordel. Estos tipos de detalles del casco y del sistema constructivo del casco se puede apreciar en ilustraciones del siglo XV (véase la Figura 19a y 19b).
Es posible que haya existido también una pequeña estructura como plataforma justo sobre la proa a manera de proto-castillo o un saltillo de proa (Figura 21) sobre los escobenes tallados en madera. El bauprés y el palo trinquete se encuentran aún in situ. Este primero en una posición original desfasado del eje de crujía y posicionado hacia la amura de estribor del palo trinquete (Figura 21). Una característica en el método de aparejamiento que deja de emplearse hacia finales del periodo medieval en Europa del norte (Rönnby 2021). El palo mayor, también in situ, se eleva unos 10 m de la cubierta principal.

Fuente: Fotografías MMT.
Figura 21 Detalle de la amura de babor. En esta imagen extraída del video de inspección es posible notar la estructura del saltillo de proa, así como el bauprés y el palo trinquete in situ y debajo de éstos, los escobenes de madera.
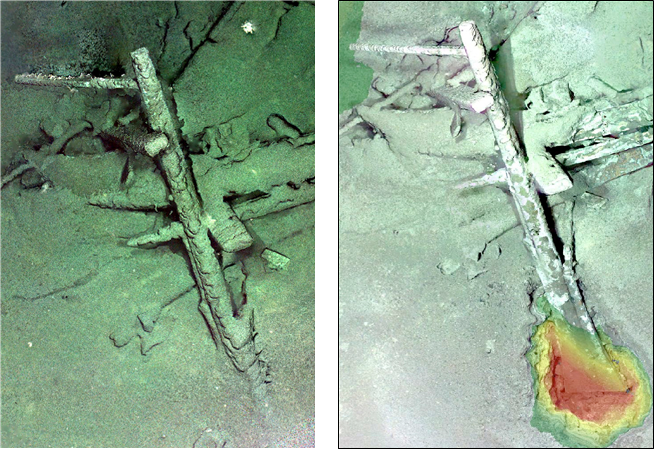
El casco del pecio conserva intacto el entablado de la cubierta principal, donde incluso se encuentra una lancha de la que sobreviven únicamente las cuadernas, la roda y el codaste (Figura 22). En la cubierta principal se distinguen claramente los dos cuarteles de escotillas, uno en la proa y otro en la popa (Figura 22). Sin embargo, los elementos más relevantes para fechar la embarcación provienen de la bomba de achique, completamente construida en madera, la única de su tipo que se ha encontrado in situ para esta época (comunicación personal Johan Rönnby) (Figura 22).

Fuente: Fotografía MMT.
Figura 22 Vista superior de la cubierta principal en donde se logra apreciar la lancha de cubierta en primer plano, a la derecha el cabrestante de madera, la bomba de la sentina apuntada por las guías laser del ROV y, al fondo de la imagen, uno de los pedreros de hierro aun a través de la porta de la borda de estribor en la cubierta principal.
Más evidencia diagnóstica en el fechamiento de la embarcación se puede apreciar en el cabrestante de madera también in situ sobre la cubierta principal. En la tradición de la arquitectura naval del mar Báltico la forma del cabrestante es utilizada para fechar navíos de forma muy regular. El cabrestante en esta embarcación presenta muchas similitudes con aquel hallado en el sitio del Mars (Figura 23) también en el mar Báltico y fechado a mediados del siglo XVI (Eriksson y Rönnby 2017).

Fuente: Fotografías Ingemar Lundgren.
Figura 23 Detalle del cabrestante de madera en el pecio del Mars, localizado en el mar Báltico: a) fotomosaico del pecio del siglo XVI Mars. El recuadro rojo indica la posición del cabrestante en el sitio y b) acercamiento del cabrestante del Mars.
En la cubierta principal hacia la popa se encuentran unas portas a la altura de las regalas de pasamanos. Tanto en la banda de estribor como a la de babor se logran apreciar dos pedreros de hierro los cuales todavía se encuentran aún en su posición de disparo a través de las portas (Figura 24). Esta es la primera vez que una de estas armas de fuego se encuentra in situ. De hecho, solo existe uno que otro ejemplar hallado en la costa de Dinamarca en la isla de Arnholm (Martin 1972; Springmann 1998). Dichos pedreros fueron manufacturados y utilizados en un periodo muy corto y es posible fecharlos de manera muy precisa hacia 1530-1550 (Howard 1987, 1986). El hallazgo de este tipo de artillería en cubierta ha sido de gran utilidad para el fechamiento relativo de la embarcación.

Fotogrametría estereoscópica de alta precisión
El sitio se estudió de la misma manera que los sitios explorados en el mar Negro. Utilizando robótica de profundidad y equipo de fotogrametría de alta resolución. En contraste con los sitios del mar Negro en este caso se hicieron unas modificaciones al equipo para incrementar la productividad y precisión. Debido a la relativa poca profundidad del sitio (145 m) se buscó capturar el modelo utilizando dos cámaras Cathx de alta resolución y montadas estereoscópicamente -el mismo eje a unos 15 cm de distancia una de la otra- (Figura 25). Esto con la finalidad de cubrir mayor área en menor tiempo y poder establecer la posición de las cámaras con mayor precisión ya que la distancia entre estas dos es conocida. Este paso es esencial ya que en caso de que el sistema de USBL llegara a producir errores de posicionamiento la distancia fija entre las cámaras sirvió como punto de referencia.
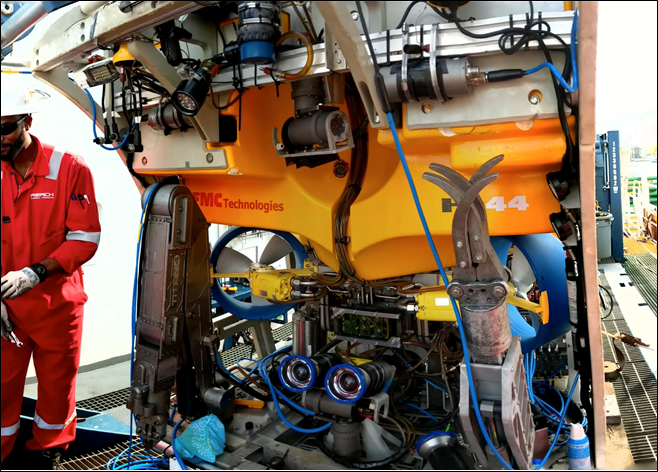
Figura 25 Configuración de fotogrametría estereoscópica montada en el WROV para mapear la embarcación del siglo XVI en el mar Báltico.
La posición en tiempo real de ambas cámaras fue calculada por medio del sistema Qinsy y retroalimentado, durante el posprocesamiento, en Agisoft Metashape. Esta metodología fue esencial para generar un modelo fotogramétrico de alta calidad del pecio en condiciones de visibilidad limitada y que había sido puesta a prueba por primera vez en el sitio arqueológico de Ropotamo en el mar Negro Búlgaro durante las excavaciones de 2017 (Pacheco-Ruiz, Adams y Pedrotti 2018) así como también en el sitio arqueológico del USS Somers en Veracruz, México (Herrera, Jiménez y Ruiz 2020). En estos sitios se utilizó un sistema más pequeño y operado por buzos en donde la poca visibilidad no hubiese permitido el mapeo de los sitios utilizando fotogrametría tradicional.
El uso múltiple de cámaras permite el acercamiento a los sitios arqueológicos de poca visibilidad sin perder cobertura al reducir la distancia debido a la poca visibilidad (Pacheco-Ruiz, Adams y Pedrotti 2018).
Al contar con un traslape de imágenes y al conocer la distancia entre las cámaras es posible realizar levantamientos fotogramétricos de alta calidad y gran precisión. Durante los trabajos en la embarcación encontrada en el mar Báltico, tentativamente fechada hacia finales del siglo XV y principios del XVI, esta metodología se adaptó a la finalidad de refinar la prospección fotogramétrica utilizando ROV. El uso del Schilling HD, en específico, una herramienta ideal para dichos sitios ya que presenta una gran estabilidad y la opción de ser configurado para recibir equipo de alta resolución como las cámaras Cathx.
Como resultado el modelo se produjo en un tiempo récord entre la captura de las imágenes y la producción del modelo de menos de cinco horas en totalidad. Gracias a la alta calidad del modelo y a la visita del sitio por el equipo de OAR fue posible diseñar una campaña en gabinete la cual estará enfocada en recopilar muestras de dendrocronología y ADN. Una nueva temporada de campo está planeada para llevar a cabo muestreo en el sitio y entender mejor la cronología utilizando técnicas de fechamiento absoluto.
La colaboración entre la academia y la industria offshore como protección de sitios arqueológicos
En 2020, durante la pandemia de Covid-19 en el mundo, las actividades en campo tanto académicas como comerciales en arqueología cesaron de manera casi total.
En marzo de ese mismo año el Reino Unido y la mayoría de Europa se encontraron con la primera cuarentena de la pandemia. Sólo aquellas industrias que eran esenciales para la sustentabilidad de la vida cotidiana quedaron exentas del aislamiento casero. Durante la prospección para la construcción de un nuevo campo de gas en el mar del Norte en el Reino Unido, el campo Tolmount, se realizó por primera vez la prospección arqueológica de un submarino alemán de la Primera Guerra Mundial, el U-Boat UC-47 (Figura 26).
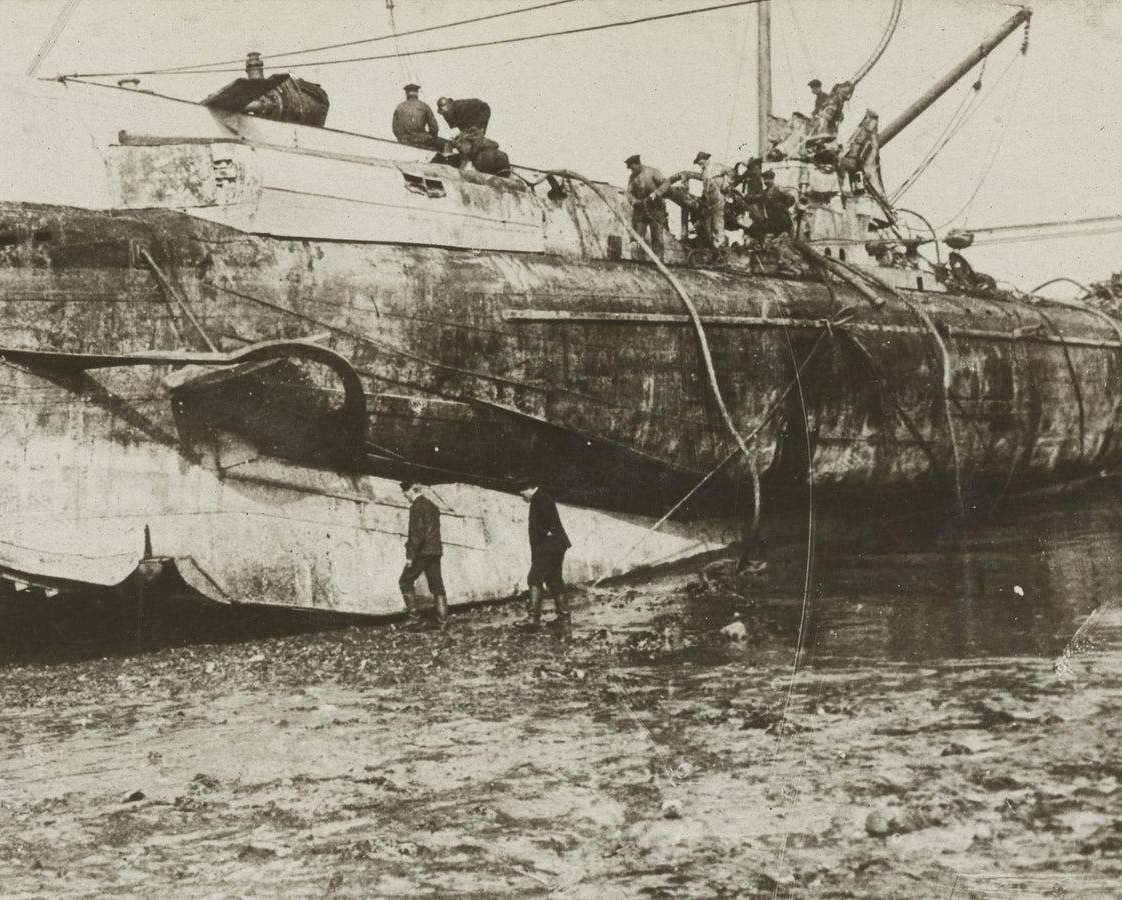
Fuente: Fotografía US National Archives and Records Administration.
Figura 26 Imagen del UC-44. Nave hermana del UC-47.
El sito se encuentra más allá de las 12 millas náuticas de la costa del Reino Unido y, por lo tanto, no ha sido considerado como sitio protegido debido a su posición ya que la ley de protección no opera más allá de dicha distancia. Sin embargo, se encuentra lo suficientemente cercano al área del campo de Tolmount. A través de la colaboración que existe entre la compañía encargada de la prospección, MMT notificó a la Universidad de Southampton del sitio y se diseñó una metodología de prospección que incluyera el estudio arqueológico del U-Boat UC-47 dentro del programa de prospección para el campo de gas Tolmount.
Ya que el equipo necesario para hacer una prospección de alta definición utilizando ROV se encontró abordo de MPSV Topaz Tiamat se decidió realizar el estudio del sitio como parte de la calibración de sistemas del proyecto industrial. La poca visibilidad en el mar del Norte no permitió que el sitio fuera explorado en el poco tiempo asignado para la operación utilizando fotogrametría. Sin embargo, ya que el sitio se encontraba a poca profundidad, 50 m, se decidió utilizar los sistemas de prospección de geofísica marina. En especial, el uso de MBES de alta resolución. Estos sistemas fueron montados en SROV cuatro sensores Konsberg EM2040 de cabeza dual fueron utilizados para realizar la prospección en menos de una hora (Figura 27).
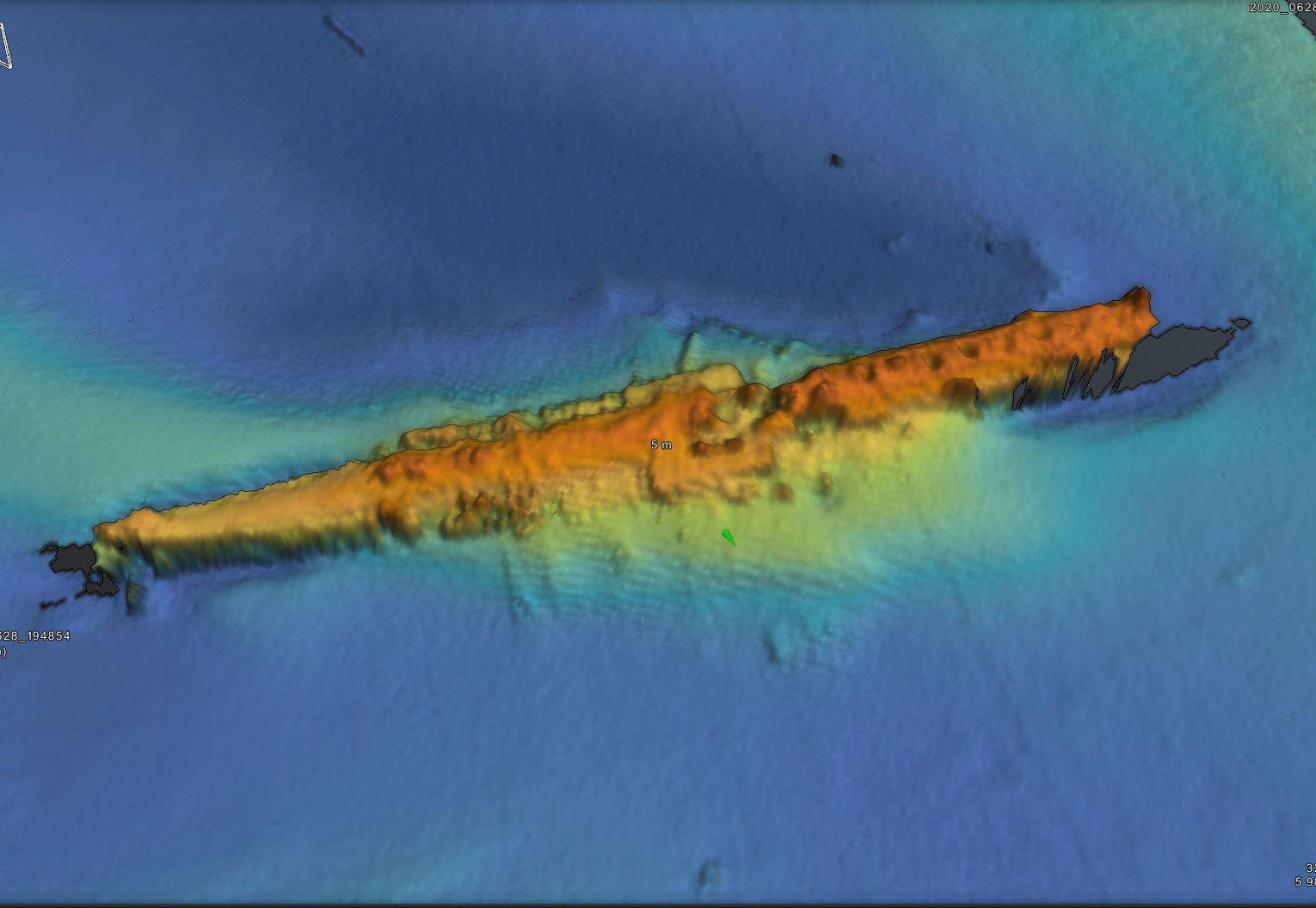
El submarino alemán fue hundido en noviembre de 1917 por la flota de la Royal Navy después de haber sido visto durante el amanecer por la tripulación de HMS P-57. Este fue embestido y bombardeado utilizando cargas de profundidad. Después del ataque no hubo mayor información de su destrucción si no fuera por la evidencia del derrame de combustible en el área días después de su desaparición. La prospección hecha por MMT en 2020 del submarino fue la primera ocasión en la cual se confirmó que los restos del submarino UC-47 yacen en el sitio después de más de cien años. A través del estudio batimétrico del sitio, se observó que el casco del submarino muestra daños correspondientes al ataque de HMS P-57 en 1917 (Figura 27).
Gracias a la colaboración que existe entre la industria offshore y la academia del programa OAR fue posible registrar y estudiar un sitio que de otra forma hubiera sido casi imposible de mapear de manera científica con equipo de tecnología de punta. La prospección demostró un sitio que se encuentra en excelentes condiciones a pesar de tener más de cien años de antigüedad y estar construido casi en su totalidad de metal. Los datos recabados del pecio se encuentran ahora bajo estudio en el CMA de la Universidad de Southampton.
Conclusiones
Este artículo demostró el uso de la robótica de profundidad para estudiar sitios que se encuentran lejos del alcance de la arqueología tradicional. Se expuso el uso de la fotogrametría como herramienta de precisión para documentar sitios de alta profundidad en donde los problemas de posicionamiento en la recabación de información de geofísica marina tienden a ser poco precisa. Además, demostró como el uso de vehículos de inspección remotos como WROV y SROV son las herramientas ideales para acercarse a estos sitos. Se aclaró que a través de la implementación de técnicas de registro en 4D (3D más la dimensión temporal) se puede entender el contexto arqueológico de aquellos sitios que se encuentran en altas profundidades con gran detalle y precisión y que dichos métodos permiten documentar también el proceso de excavación científico con mayor control.
También se indicó que gracias a la colaboración entre la industria offshore y la academia a través del financiamiento filantrópico muchos de aquellos sitos que se encuentran fuera de la competencia de la legislación internacional pueden ser estudiados y protegidos siguiendo el código de práctica establecido por la UNESCO. A través del proyecto del Black Sea MAP en el mar Negro y OAR en el Báltico y el mar del Norte este artículo demostró el uso de la tecnología de punta para realizar investigación arqueológica en aquellos sitios que se encuentran alejados de la intervención humana y en condiciones ambientales que permiten su conservación en niveles extraordinarios como es el caso de los sitios mencionados.
En el caso de la embarcación del siglo XVI en el mar Báltico se logró documentar el sitio en 3D utilizando fotogrametría estereoscópica de alta precisión en menos de cinco horas. El modelo ayudó a entender los pormenores de la arquitectura naval del sitio, así como los detalles constructivos y elementos arqueológicos y de gran uso para el fechamiento relativo del lugar. También se demostró la importancia de las colaboraciones académicas en esos tiempos recientes en donde la pandemia de Covid-19 afectó el estudio arqueológico en campo, pero que, en el caso del submarino alemán UC-47 de la Primera Guerra Mundial, fue posible continuar el estudio de sitos arqueológicos como parte de proyectos vitales de infraestructura.
El nivel de desarrollo tecnológico que la arqueología de profundidad ha seguido desde sus inicios en la década de 1980 ha permitido alcanzar sitios de difícil acceso de una manera más precisa y frecuente. Sin embargo, estos estudios son muy complicados de realizar sin la colaboración del sector privado para la investigación académica. Sobre todo, si estos sitios se pretenden estudiar siguiendo las recomendaciones de la UNESCO en cuanto a la protección del patrimonio sumergido. El programa de OAR de la Universidad de Southampton pretende mantener dicha colaboración a largo plazo y más sitios han sido programados para su visita científica.
Tanto el proyecto Black Sea MAP como OAR generaron no solo uno oportunidad única para implementar tecnología de punta en la investigación arqueológica, sino que también funcionó como centro de entrenamiento de más de 20 profesionales y 30 alumnos de posgrado, así como de educación primaria y secundaria. Por medio de la difusión y publicación de los resultados en fuentes académicas y de divulgación el proyecto demostró que la arqueología marítima bien financiada y apegada a los principios de protección del patrimonio de la UNESCO es posible hoy en día (Adams et al. 2017 y 2016).

