











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
Cuando un estudiante está iniciando el aprendizaje de cualquier tema, se topa con la dificultad de no entender completamente los conceptos abordados (Marques, 2011), debido a que no visualiza la aplicación que estos tendrán en un sistema real una vez que ha terminado su carrera. Lo anterior se debe a que la mayoría de los ejemplos vistos en clase, se inventan con fines didácticos y no tienen un sentido físico (Ferreira y Rodriguez, 2011), por lo que el conocimiento solo se queda plasmado en la forma de notas y no como aprendizaje en la propia memoria del individuo.
Una manera de solventar esta problemática de aprendizaje, es mediante el uso de sistemas que impactan directamente en sus vidas (Jinks, 1994), tal como lo son las plantas de reciclaje. Esto, debido a que hoy en día se ha incrementado el interés en la conservación del medio ambiente debido al alto índice de contaminación (Julander et al, 2014).
Dentro de una planta de reciclaje, existen diversos procesos que permiten llevar a cabo la separación de los residuos que llegan a ésta, para posteriormente ser reciclados (Elias, 2012). Aunque procesos tales como la separación de materiales ferrosos, la de los no ferrosos o la de vidrio pueden resultar bastante atractivas para estudiar, su análisis no es sencillo de entender para un estudiante que apenas comienza, debido a que la obtención de los modelos matemáticos puede requerir de conocimientos que no han sido adquiridos hasta el momento (Shao et al., 1996; Brozek, 1999; Karmazin, 2002).
Lo anterior, motiva el estudio de uno de los primeros procesos que se debe realizar en una planta de reciclaje, es decir, el de abrir las bolsas plásticas que contienen los residuos para iniciar con el proceso de separación de residuos.
El objetivo principal de este trabajo es presentar la manera de aplicar los conocimientos adquiridos en el curso de dinámica tales como equilibrio estático, fricción, movimiento rectilíneo uniformemente acelerado, suma vectorial de velocidades y tiro parabólico (Gross et al., 2011). Lo anterior, con la finalidad de obtener las ecuaciones matemáticas que describen las dimensiones que se requieren para diseñar el sistema abre bolsas.
Análisis dinámico de un objeto
En este trabajo se considera que el módulo abre bolsas está constituido principalmente por una superficie inclinada, sobre la cual se pueden deslizar los residuos debido a la fuerza que ejerce la gravedad sobre los mismos. A lo largo de la distancia que deben recorrer los residuos, se encuentran tres cilindros cortadores giratorios, compuestos por un soporte circular y cuatro cuchillas. Los cilindros cortadores están dispuestos de tal manera que las bolsas sean rasgadas, permitiendo que los residuos se distribuyan sobre la superficie inclinada. En la Figura 1, se muestra un bosquejo simplificado del sistema mecánico abre bolsas.

Angulo de inclinación limite
El primer análisis que se debe llevar a cabo es el del ángulo de inclinación límite que se requiere para que la bolsa que contiene los residuos comience a deslizarse, para lo cual se utiliza el diagrama de fuerzas mostrado en la Figura 2.

En la Figura 2 se muestra un plano inclinado un ángulo θ, sobre el cual está localizado una bolsa de basura de peso W. Dicho bolsa, se encuentra sometida a varias fuerzas que no permiten que se desplace, de tal manera que permanece en equilibrio.
Estas fuerzas son: la fuerza de gravedad que provoca el peso de la bolsa, la fuerza normal N que se opone al movimiento del objeto en forma perpendicular al plano inclinado y la fuerza de fricción que se opone al movimiento del objeto en la dirección del plano inclinado.
Lo primero, es realizar la sumatoria de las fuerzas que actúan de manera perpendicular al plano inclinado, tal que se obtiene una expresión de la fuerza normal en función del ángulo de inclinación, es decir

La expresión para la fuerza fricción que se opone al movimiento de la partícula, se obtiene al realizar una sumatoria de fuerzas sobre el eje colineal al plano inclinado, tal que

mediante lo cual, se obtiene una expresión en función del ángulo de inclinación. Sin embargo, por definición se sabe que la fuerza de fricción puede escribirse como una función del coeficiente de fricción µs y la fuerza normal

Cabe aclarar, que se toma la suposición de que los residuos se encuentran distribuidos uniformemente dentro de la bolsa, por lo que el peso estaría también distribuido sobre la superficie de contacto, permitiendo analizar la bolsa como si fuese una partícula.
Utilizando (3), y se sustituyendo en (2), se obtiene una expresión para el coeficiente de fricción estático µs

Sustituyendo (1) en (4), y despejando (, se obtiene

en donde se observa que el ángulo de inclinación límite depende exclusivamente del coeficiente de fricción, y no del peso de la bolsa de basura. Lo anterior implica que, de manera general, cualquier objeto que se encuentre sobre un plano inclinado que sobrepase esta restricción, no tendrá un equilibrio dinámico y por lo tanto, se desplazará hacia la parte inferior del plano.
Bolsa de basura en movimiento acelerado
Una vez que la bolsa comienza a desplazarse sobre el plano inclinado, ésta lo hace con una aceleración constante debido a la gravedad. Durante este movimiento, se tiene una fuerza de fricción que se opone al movimiento, la cual es una función del coeficiente de fricción dinámico µk.
Realizando la sumatoria de fuerzas sobre el eje colineal al plano inclinado, se obtiene la aceleración de la bolsa

Se observa que esta aceleración, es una función de la magnitud de la aceleración de caída libre g, del ángulo de inclinación ( y del coeficiente de fricción µk, sin que se tenga que tomar en cuenta la masa del objeto. Debido a que el objeto se encuentra en movimiento sobre el plano inclinado y se mantiene dentro del mismo, se presenta un movimiento rectilíneo uniformemente acelerado, el cual puede analizarse utilizando la Figura 3.

El objeto, se encuentra moviéndose desde el punto 1 con una velocidad  , por lo que recorrerá una distancia
, por lo que recorrerá una distancia  , hasta alcanzar una velocidad
, hasta alcanzar una velocidad  . La distancia sobre el plano inclinado puede calcularse al conocer la altura existente entre los puntos 1 y 2, así como la separación de forma horizontal que existe entre los mismos.
. La distancia sobre el plano inclinado puede calcularse al conocer la altura existente entre los puntos 1 y 2, así como la separación de forma horizontal que existe entre los mismos.
La velocidad a la que el objeto llega al punto 2 está dada como

Sustituyendo la aceleración encontrada en (5) en (6) se obtiene

Cambio de velocidad lineal debido a giro de cuchillas
En el punto 2 del recorrido, se encuentra el primero de los cilindros con cuchillas, el cual está girando a una velocidad constante  , por lo que en la punta de la cuchilla se tendrá una velocidad lineal
, por lo que en la punta de la cuchilla se tendrá una velocidad lineal  , la cual forma un ángulo
, la cual forma un ángulo  respecto de la horizontal, como se muestra en la Figura 4. Cabe mencionar que para este punto no se considera el efecto del impacto existente entre un objeto y la cuchilla, por lo que simplemente se realiza un análisis de velocidades.
respecto de la horizontal, como se muestra en la Figura 4. Cabe mencionar que para este punto no se considera el efecto del impacto existente entre un objeto y la cuchilla, por lo que simplemente se realiza un análisis de velocidades.

Debido a que la punta de la cuchilla, ubicada en el punto 3, coincide con el punto 2, el objeto bajo análisis adquirirá una velocidad  , la cual es la suma vectorial de la velocidad
, la cual es la suma vectorial de la velocidad  y la velocidad
y la velocidad  , es decir
, es decir

donde  y
y  son los vectores unitarios de los ejes x y y, respectivamente.
son los vectores unitarios de los ejes x y y, respectivamente.
Movimiento parabólico de un residuo
Cuando alguna de las cuchillas desgarra la bolsa, no se puede asegurar que todos los residuos continúen deslizándose sobre el plano inclinado, por lo que se requiere analizar que sucede si un residuo es atrapado por alguna de las cuchillas. Ya que todos los residuos dentro de la bolsa se deslizan a la misma velocidad de esta, se puede suponer que si un objeto es atrapado por la cuchilla, este será lanzado desde el punto 3 al punto 4, en forma de tiro parabólico con un ángulo inicial  , tal como se muestra en la Figura 5.
, tal como se muestra en la Figura 5.

Ya que el objeto cambia de dirección, se debe descomponer su movimiento en un desplazamiento horizontal, denotado por  , y un movimiento vertical, denotado por
, y un movimiento vertical, denotado por  .
.
Tomando como condición inicial el punto 3, se tiene que el desplazamiento horizontal es un movimiento rectilíneo uniforme, por lo que se tiene que

en donde el subíndice f se refiere a la posición final mientras que el subíndice i es para la posición inicial y t es el tiempo.
Por otra parte, para el desplazamiento vertical, se tiene un movimiento rectilíneo uniformemente acelerado, por lo que se cumple que

en donde g representa la aceleración de caída libre.
Para encontrar la distancia que recorre el objeto, en la dirección del plano inclinado una vez que es lanzado, se despeja t en (10) en la expresión (11)

Modelo matemático para calcular distancias totales
Una vez que se han obtenido los análisis para los distintos movimientos presentes en el sistema abre bolsas, lo siguiente es obtener las máximas distancias que recorre el objeto, desde que inicia su movimiento hasta que toca el nivel del suelo.
La máxima distancia horizontal que recorre el objeto, está dada como la suma de las distancias horizontales del punto 1 al 2 y la del punto 3 al 4, tal que

Sumando las distancias verticales del 1 a 2 y de 3 a 4, se obtiene la distancia máxima vertical que recorrerá el objeto, es decir

Se observa, que en (13) y (14) se tiene una dependencia del ángulo ( y de la velocidad  , por lo que utilizando las definiciones para las funciones trigonométricas seno, coseno y tangente de un ángulo, junto con (9) se tiene que las distancias horizontal y vertical máximas pueden reescribirse como
, por lo que utilizando las definiciones para las funciones trigonométricas seno, coseno y tangente de un ángulo, junto con (9) se tiene que las distancias horizontal y vertical máximas pueden reescribirse como


Mediante las ecuaciones (15) y (16) se describe el comportamiento dinámico de un objeto sobre el plano inclinado, por lo que se puede llevar cabo el diseño del sistema abre bolsas utilizando ambas ecuaciones.
Lo anterior, debido a que se pueden conocer la dimensiones requeridas de longitud y altura, en función de la velocidad de rotación de los cilindros cortadores, el ángulo de las cuchillas, la distancia  entre el centro del cilindro y la punta de la cuchilla, de la velocidad inicial
entre el centro del cilindro y la punta de la cuchilla, de la velocidad inicial  del objeto, así como de las distancias
del objeto, así como de las distancias  y
y  entre el inicio del objeto y la ubicación de la primera punta de la cuchilla.
entre el inicio del objeto y la ubicación de la primera punta de la cuchilla.
Cabe recalcar, que también se tiene un ángulo , sin embargo, este depende directamente del diseño y la forma de la cuchilla.
Simulaciones
Con la finalidad de verificar el comportamiento dinámico descrito en (15) y (16), se utilizan los parámetros mostrados en la Tabla 1
Al sustituir el valor µk en (5), se obtiene un ángulo límite de 14.57° para que la bolsa de residuos comience a deslizar sobre el plano inclinado, sin embargo, para asegurar que se de el deslizamiento se toma un ángulo θ=15°.
Mediante el ángulo propuesto y los parámetros de la tabla 1 se obtienen los valores de la Tabla 2.

Finalmente, utilizando (15) y (16) se obtiene que la distancia horizontal que recorre un residuo es dh = 4.6257 m, mientras que la distancia vertical es dv = 1.2394 m. Sin embargo, esto corresponde a la sustitución de valores, por lo que se procede a llevar a cabo la simulación mediante el software Working Model (r).
En este software lo que se hace es construir virtualmente una de las cuchillas y el plano inclinado, así como un bloque que representa uno de los residuos que se encuentran dentro de la bolsa y que es atrapado por la cuchilla.
La Figura 6, muestra una captura de pantalla de la simulación del sistema, en donde se observan los medidores para la posición y velocidad lineal del residuo, así como la velocidad lineal y angular de la punta de la cuchilla.
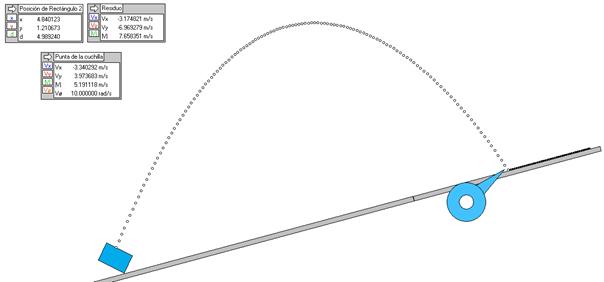
En los medidores de la simulación, se tiene que la distancia horizontal que recorre el residuo es 4.840123 m, mientras que la distancia vertical es 1.210673 m. Lo anterior difiere de los resultados obtenidos previamente, ya el software simula un objeto y no una partícula, además de que toma en cuenta los coeficientes de elasticidad de los materiales.
El error que se tiene es de 0.214423 m horizontalmente y -0.028727 m verticalmente, lo que representa aproximadamente un 4.64% y 2.32%, respectivamente, respecto a los valores calculados numéricamente.
Conclusiones
Mediante lo desarrollado en el artículo, se tiene un ejemplo claro de la aplicación de los conocimientos que un estudiante adquiere en el curso de dinámica, ya que se lleva a cabo el análisis de un objeto, visto como una partícula, desde que inicia hasta que termina su movimiento sobre un plano inclinado. Además, se presenta una oportunidad para los académicos de fomentar la participación de los estudiantes de manera práctica, ya que se deja como trabajo el llevar a cabo el diseño del cilindro de corte junto con la cuchilla, con la finalidad de obtener el ángulo que forma la velocidad lineal de la cuchilla con el plano inclinado.
Por otra parte, el cálculo realizado de forma simbólica es una ventaja, ya que tanto estudiantes como el catedrático pueden explorar distintos escenarios, variando desde la velocidad inicial de el objeto, hasta la velocidad de giro de el cilindro cortador.
Además, el uso de software especializado en simulación dinámica, permite que el alumno pueda visualizar el comportamiento de un objeto y corroborar lo propuesto matemáticamente.

