











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
Una de las fuentes más comunes de generación de vibración en máquinas rotatorias se debe al desbalance. El desbalance ocurre cuando el eje principal de inercia del rotor no coincide con el eje geométrico del sistema, lo que provoca vibraciones que generan fuerzas indeseables que se trasmiten directamente a los elementos mecánicos, así como, soportes y cojinetes del rotor. Por otra parte, el fenómeno de la resonancia que ocurre cuando la frecuencia de excitación se iguala con una frecuencia natural del rotor, genera que los efectos del desbalance sean catastróficos para el sistema, por lo que es necesario proponer métodos y/o dispositivos para atenuar este tipo de vibraciones. Por su parte, las técnicas de balanceo en sistemas rotodinámicos consisten en la adición o eliminación de masas en ubicaciones específicas del rotor, la magnitud y posición angular de las masas se seleccionan de manera que las fuerzas centrífugas que actúan sobre ellas al girar el rotor se opongan a las fuerzas producidas por el desbalance original, de tal forma que contrarresten sus efectos. Entre los métodos más comunes de balanceo se encuentran los métodos de balanceo por coeficientes de influencia y balanceo modal.
Para poder balancear un sistema rotor-cojinete, es necesario determinar el desbalance presente en el sistema y su posición angular. Por tanto, es necesario implementar algún método de balanceo que permita determinar estos parámetros. Asimismo, también existe una vasta literatura sobre métodos de identificación y estimación de parámetros, los cuales son esencialmente asintóticos, recursivos o complejos (Ljung [1]; Soderstrom [2]; Sagara y Zhao [3]; Sagara y Zhao [4]). Actualmente, existe otro método de identificación cuyo enfoque es diferente a los métodos de identificación clásicos, conocido como método de identificación algebraica. Éste se basa en el algebra diferencial y el cálculo operacional para el desarrollo de estimadores a medida que permiten la determinación de parámetros desconocidos de un sistema a partir de su modelo matemático. De igual forma, las estimaciones se realizan en línea y en tiempo continuo o discreto. Una de las características de la identificación algebraica es, proporcionar relaciones de identificación completamente independientes de las condiciones iniciales del sistema. Algunas comparaciones entre los métodos clásicos de identificación y la identificación algebraica, así como, sus ventajas y desventajas se encuentran en Trapero [5]. La identificación algebraica ya ha sido empleada para la estimación de parámetros y señales en sistemas mecánicos vibratorios, lineales y no-lineales (Beltrán-Carbajal et al. [6]; Beltrán-Carbajal et al. [7]; Beltrán-Carbajal et al. [8]; Beltrán-Carbajal et al. [9]; Beltrán-Carbajal et al. [10]; Blanco et al. [11]; Trapero et al. [12]; Trapero et al. [13]; Arias et al. [14]). Los resultados numéricos y experimentales muestran que la identificación algebraica proporciona una elevada robustez contra la incertidumbre de los parámetros, variaciones de frecuencia, pequeños errores de medición y ruido. Información adicional sobre la robustez de la identificación algebraica se encuentra en Sira-Ramírez et al. [15].
En este artículo, se presenta el tratamiento matemático para el desarrollo de un modelo para la estimación en línea del desbalance y su posición angular, para sistemas rotor-cojinete de múltiples grados de libertad, el cual se basa en el método de identificación algebraica en línea reportado por Fliess y Sira-Ramírez [16]. La ventaja que ofrece el modelo propuesto, es que solo se necesita la respuesta de vibración en línea del sistema como dato de entrada, y no es necesario llevarlo hasta su velocidad nominal de operación, para identificar el desbalance y su posición angular y proceder a balancear el rotor.
Modelado de sistemas rotor-cojinete utilizando el método del elemento finito
En el pasado, se han desarrollado con éxito varias aproximaciones numéricas para el análisis del comportamiento dinámico de sistemas rotodinámicos. De tales aproximaciones numéricas, tal vez el enfoque más popular por su alta eficiencia y conveniencia de la modelización, es el método del elemento finito. De acuerdo con Fei et al. [17], el método del elemento finito para rotores fue desarrollado por primera vez por Ruhl y Booker, (1972). En su trabajo, solo consideran la energía de flexión elástica y energía cinética de traslación. Por su parte Nelson y McVaugh [18], generalizaron el trabajo de Ruhl y Booker, (1972) al proponer una formulación de elemento finito donde se incluyen los efectos de la inercia rotatoria, momentos giroscópicos y el efecto de una carga axial. Posteriormente Zorzi y Nelson [19], incorporaron los efectos del amortiguamiento en el modelo de elemento finito, y Nelson [20], introdujo el efecto de la deformación por cortante utilizando la teoría de vigas de Timoshenko, con lo que fue posible simular un sistema de un rotor flexible soportado por cojinetes de rigidez lineal y amortiguamiento viscoso.
Los elementos básicos de un sistema rotor-cojinete son: el disco, el eje, los cojinetes y los sellos (Berthier et al. [21]; Lalanne et al. [22]), además de las masas de desbalance. Para caracterizar los diferentes elementos del rotor como el disco y la masa de desbalance, es necesario determinar las expresiones para la energía cinética. Así mismo, en lo que respecta al eje, además de la energía cinética se requiere el conocimiento de la energía de deformación. A partir del principio de los trabajos virtuales, se obtienen las fuerzas derivadas de los rodamientos y/o sellos que actúan sobre el eje.
Las ecuaciones generales del sistema se obtienen a partir de los siguientes pasos:
Se determina la energía cinética
Se aplica la ecuación de Lagrange para obtener las ecuaciones de movimiento para cada uno de los elementos.
La ecuación de Lagrange se definen como:
donde
Modelo matemático de un sistema rotor-cojinete de múltiples grados de libertad
El modelo matemático para el sistema rotor-cojinete de múltiples grados de libertad se obtiene mediante el método del elemento finito. El eje se modela con un elemento finito tipo viga de cuatro grados de libertad por nodo, dos desplazamientos laterales y dos rotaciones (flexiones de la viga), tal y como se muestra en la Figura 1.

Donde el vector de desplazamiento nodal se define como:
En la ecuación (2) "T" denota transpuesta, y los desplazamientos y rotaciones correspondientes a los movimientos en las direcciones
Siguiendo la metodología propuesta por Nelson y McVaugh [18] y Lalanne y Ferraris [23], para el modelado de los elementos de un sistema rotor-cojinete y aplicando la ecuación (1), se tiene que el modelo matemático para el sistema rotor-cojinete de múltiples grados de libertad, se puede escribir como:
con
donde
Modelo matemático para la identificación algebraica del desbalance y posición angular
El objetivo del identificador algebraico en línea propuesto, es determinar la magnitud y posición angular del desbalance presente en sistemas rotor-cojinete. Para el desarrollo del identificador, se toma como base el modelo matemático del sistema rotodinámico de múltiples grados de libertad, donde se incluyen los efectos de la inercia rotatoria, momentos giroscópicos, deformaciones por cortante y amortiguamiento interno y externo del sistema, ecuación (4). Asimismo, se considera que el vector de desplazamientos del sistema
Para el análisis, se considera que en el sistema rotor-cojinete solo existe una masa de desbalance, por lo tanto, la ecuación (4) se puede reescribir como:
Al multiplicar la ecuación (5) por
donde
Posteriormente, al integrar por partes y después de realizar algunos tratamientos algebraicos en la ecuación (6), ésta se puede expresar en sistemas de ecuaciones lineales para cada nodo de la forma:
donde,
con
Nótese que
De la ecuación (7) se puede observar que el vector
De la solución de (7), se obtiene el modelo para el identificador en línea, para la magnitud del desbalance y su posición angular.
Como se puede observar en la ecuación (9), la identificación algebraica de los parámetros del desbalance y su posición angular del sistema rotodinámico, es independiente de las condiciones iniciales, además, solo depende del vector de desplazamientos del sistema para cada instante de tiempo.
Simulación del sistema rotor-cojinete de múltiples grados de libertad
Considérese el sistema rotodinámico que se muestra en la Figura 2, el cual se compone de un eje, tres discos inerciales y dos soportes en los extremos. Asimismo, también se muestra la discretización del rotor, así como, la masa de desbalance presente en el sistema. Se proponen tres masas de desbalance en tres posiciones angulares diferentes, las cuales se distribuyen en los tres discos inerciales a lo largo del rotor, que corresponden a los nodos 3, 6 y 11 respectivamente, ver Tabla 1.
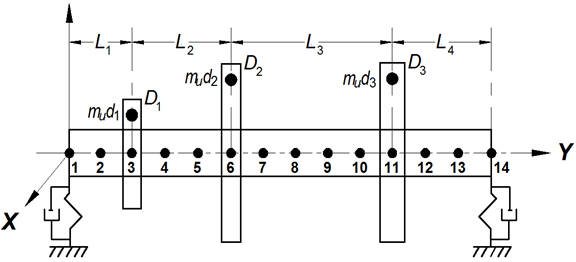
Tabla 1: Masas de desbalance presentes en el sistema
| Desbalance |
Posición angular |
|
|
|
|
|
|
|
|
|
Cabe señalarse que aunque el sistema rotodinámico que se consideró en la Figura 2, corresponde a un sistema rotor-cojinete simple, el modelado de un rotor real mediante el modelo de la ecuación (4) es factible. En el trabajo de Lalanne y Ferraris [23], se encuentra la aplicación de un modelo similar al representado por la ecuación (4), para el modelado de rotores industriales tales como: rotores de compresores centrífugos, compresores de vapor, turbinas de gas, turbinas de vapor, entre otros.
En las Tabla 2 y Tabla 3 se muestran las propiedades mecánicas y geométricas del eje y los discos respectivamente.
Tabla 2 Propiedades mecánicas y geométricas del eje
| Propiedades mecánicas | Geometría | |
|
|
|
|
|
|
|
|
|
|
|
|
Tabla 3 Propiedades mecánicas y geométricas de los discos
| Propiedades mecánicas | Geometría | |||
|
|
Disco |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
En la Tabla 4 se muestran las características de rigidez y amortiguamiento viscoso de los soportes.
Tabla 4 Características de los soportes
| Rigidez | Coeficiente de amortiguamiento |
|
|
|
|
|
|
|
|
|
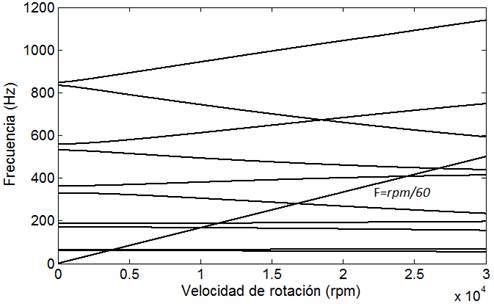
En la Figura 3, se presenta el diagrama de Campbell para el sistema rotor-cojinete correspondiente a la Figura 2. Del diagrama se observa que para el intervalo de velocidades de 0 a 30 000 rpm, las masas de desbalance solo excitan siete frecuencias naturales del sistema.
En la Tabla 5, se presenta una comparación de las primeras siete frecuencias naturales para el rotor de la Figura 2, considerando discretizaciones del rotor con diferente número de elementos finitos. Asimismo, en la Figura 4 se muestra el diagrama de Bode de la respuesta de vibración correspondiente al nodo 6, posición del disco inercial 2, para tres diferentes discretizaciones del rotor 13, 26 y 52 elementos finitos.
Tabla 5: Comparación de frecuencias naturales
| Frecuencia Natural (Hz) |
Modelo del Rotor | |||
| 13 Ele. Finitos |
26 Ele. Finitos |
52 Ele. Finitos |
Desviación (%) |
|
|
|
60.15 | 60.36 | 60.36 | 0.35 |
|
|
63.10 | 63.33 | 63.33 | 0.36 |
|
|
166.30 | 167.10 | 167.10 | 0.48 |
|
|
189.10 | 188.20 | 188.20 | 0.48 |
|
|
278.10 | 279.60 | 279.60 | 0.54 |
|
|
405.20 | 407.50 | 407.50 | 0.57 |
|
|
441.50 | 444.40 | 444.40 | 0.65 |
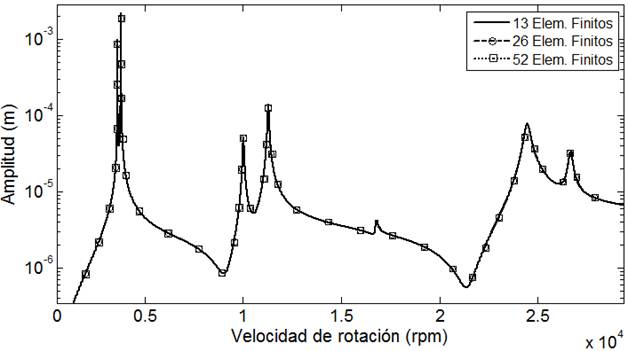
De acuerdo con los resutados mostrados en la Tabla 5, los valores de las frecuencias naturales obtenidas para los modelos de 26 y 52 elementos finitos son similares, y la desviación porcentual entre estos datos y los correspondientes para el modelo de 13 elementos finitos es menor al 1%, lo que justifica el uso de unos pocos elementos finitos para las simulaciones presentadas en este trabajo. De igual forma, la Figura 4 muestra que para los diferentes esquemas de discretización del sistema rotor-cojinete a partir de 13 elementos finitos, no influye en la respuesta del rotor.
Simulación de la identificación algebraica en línea del desbalance y su posición angular
Considerese el sistema rotor-cojinete que se muestra en la Figura 2. En la Tabla 1, se presentan los nodos donde se encuentra el desbalance, así como su magnitud y posición angular. La identificación algebraica en línea de la magnitud del desbalance, así como su posición angular, se determinan con base en la respuesta vibratoria del rotor en función del tiempo. Por otra parte, la respuesta de vibración del sistema que se utiliza como dato de entrada para el modelo de la identificación, se obtiene a partir de la solución de la ecuación (4), mediante el método de integración numérica de Newmark. Nótese que la respuesta de vibración se puede obtener para cada uno de los nodos en los que fue discretizado el rotor, en consecuencia, es posible obtener una gráfica del comportamiento del identificador (9); en función del tiempo para cada nodo del sistema.
En la Figura 5a y Figura 5b, se muestran las señales de vibración del sistema para el nodo 6, en las direcciones x y z respectivamente. Estas señales junto con las correspondientes para los nodos restantes del rotor, son los datos de entrada requeridos para los identificadores de los parámetros de desbalance. Cabe señalarse que la velocidad del rotor seleccionada para las simulaciones es de

Figura 5 (a) Señal de vibración en la dirección x del nodo 6 y (b) Señal de vibración en la dirección z del nodo 6.
En las Figuras 6 a la Figura 8 y de la Figura 9 a la Figura 11, se muestra el comportamiento del identificador del desbalance y su posición angular en función del tiempo respectivamente, comportamiento que corresponde a los nodos 3, 6 y 11 del rotor. En las figuras la línea punteada representa los valores reales asignados, mientras que la línea continua representa el resultado obtenido de la estimación algebraica en línea.


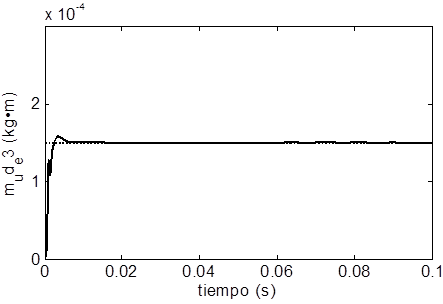


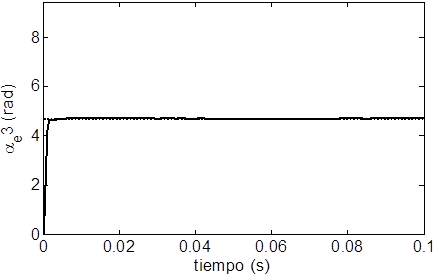
Se puede observar de las Figuras 6 a la Figura 11, que la identificación tanto del desbalance como de su posición angular se lleva a cabo en menos de 0.02 segundos y una vez identificado el parámetro, éste se mantiene constante a lo largo del tiempo. Para un mejor análisis del comportamiento del identificador, en las figuras solo se muestran los resultados para un tiempo de hasta 0.1 segundos, ya que es importante observar el tiempo que requiere el identificador en línea para converger al valor estimado.
Por otra parte, en las Figuras 12 y Figura 13, se muestra el comportamiento del identificador del desbalance y su posición angular en función del tiempo respectivamente, comportamiento que corresponde al nodo 8, en el cual no existe desbalance en el rotor.


En la Figura 12 se aprecia como el identificador del desbalance tiende de forma inmediata a un valor de cero, esto a causa de que en el nodo 8 no existe masa que ocasione un desequilibrio al sistema. Asimismo, en la Figura 13 se observa que el identificador de la posición angular del desbalance no converge en un valor fijo, esto también a causa que en el nodo 8 no existe masa que provoque un desbalance en el sistema. Cabe mencionarse que este comportamiento, se presenta en todos los nodos del rotor donde no existe masa de desbalance.
Conclusión
Se propone un modelo matemático de un identificador para determinar la magnitud y posición angular del desbalance en un sistema rotodinámico de múltiples grados de libertad, basado en la técnica de identificación algebraica de parámetros en línea. El modelo propuesto, requiere de la respuesta de vibración del rotor (desplazamiento) a velocidad constante como dato de entrada. Se evaluó y analizó de forma numérica, el comportamiento en el tiempo del identificador propuesto; para una distribución de masas de desbalance en diferentes puntos a lo largo del rotor, tomando como dato de entrada la respuesta de vibración obtenida de la simulación de un sistema rotodinámico de múltiples grados de libertad. Los resultados numéricos muestran la rapidez y convergencia en la identificación de los parámetros de desbalance en un intervalo de tiempo de aproximadamente 0.02 segundos. La ventaja que ofrece el método propuesto en el balanceo de rotores, es que se puede identificar la magnitud y posición angular de las masas de desbalance que causan la vibración en el sistema rotodinámico, sin la necesidad de llevar al rotor hasta su velocidad nominal de operación, evitando así, pasar por las diferentes velocidades críticas del sistema.




