











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
Introducción
Actualmente los sistemas de producción elaboran una gran variedad de productos, y en la mayoría de las ocasiones en bajo volumen, fabricados bajo pedido. La diversificación de productos en una línea de producción hace complejo reducir costos de producción, satisfacción de los requerimientos específicos del cliente, así como cumplir con las fechas de entrega (Mori & Mahalec, 2017). La planeación y programación de la producción resulta ser clave en la decisión que maximice la productividad, asignando la cantidad adecuada de recursos a los requisitos de la demanda a lo largo del sistema de producción (Hoon-Kim & Hoon-Lee, 2016). Sin embargo, a menudo se resuelven por separado de manera secuencial. Es decir, un problema de planificación se puede resolver para determinar las cantidades de producción semanales de acuerdo con los pedidos del cliente, después las cantidades de producción semanales pasan a la programación y se determina un programa de producción para cada semana asignando una tarea operativa a una unidad de trabajo o línea de producción capaz de secuenciar las actividades (Chu et al., 2015).
De acuerdo con Bellgran & Säfsten (2010), la programación de órdenes de producción es la forma adecuada de un conjunto de trabajos que esperan ser procesados por una o un conjunto de máquinas dispuestas en correcta secuencia tecnológica, que permita reducir tiempos de ejecución, procesamiento y entrega, asimismo, minimizando costos de producción. La programación generalmente se aborda de dos maneras:
Creando una tabla de tiempo basada en los recursos para completar el trabajo en un horizonte a corto plazo, y
Determinando la prioridad de los trabajos para un recurso inactivo mejorando las medidas de desempeño (Hoon-Kim & Hoon-Lee, 2016).
Con frecuencia, la programación de órdenes de producción se realiza a través de la experiencia o intuición, sin embargo, la asignación realizada la mayoría de las veces no es la apropiada. Una asignación errónea trae consigo incremento en los costos de producción, penalizaciones en entregas tardías o por faltantes, inventario en la línea de producción, desprestigio de la marca, así como pérdida de competitividad en el mercado.
La complejidad de la programación de órdenes de producción evoluciona constantemente dado el comportamiento de mercado y el avance tecnológico. Hasta el momento, investigaciones realizadas han tratado el tema, pero de manera particular, dirigidas a problemas específicos como lo muestran Man et al. (2000), donde abordaron los problemas de planeación y programación de la producción en un entorno de producción multi-producto considerando el tamaño de lote. Los autores Józefowska & Zimniak (2008), presentaron un sistema que apoya la toma de decisiones en la planeación y programación de la producción a corto plazo en plantas de producción caracterizadas por un proceso de fabricación de una sola operación, así como Guinet (2001); Leung et al. (2017); Timpe & Kallrath (2000) investigaron el problema de planeación de la producción para múltiples sitios donde consideran a cada sitio como una unidad de producción independiente y paralela. En el trabajo de Guo et al. (2013) consideran la asignación de órdenes de producción en plantas situadas en diferentes lugares con fechas de entrega en el almacén central. Usualmente estos casos pertenecen a problemas de planeación agregada. Sin embargo, pocos estudios han investigado la asignación de órdenes de producción entre diferentes líneas productivas (multi-línea) considerando lotes de producción con características diferentes entre cada uno de ellos (multi-producto).
Este documento describe la optimización de un sistema de producción con características multi-línea y multi-producto, obteniendo la óptima asignación de órdenes de producción; su desarrollo se divide en tres secciones: Análisis y descripción del sistema de producción multi-linea y multi-producto, optimización del sistema productivo a través del algoritmo PSO, donde se realiza la optimización para cada función objetivo y para las dos funciones objetivo en conjunto, dada la incertidumbre presente en el equipo o la persona que tome la decisión y basada en sus preferencias de acuerdo con las características de las variables internas y externas del sistema productivo (Acosta, 2019) y finalmente la interpretación de resultados.
Desarrollo
Sistema de producción
Se propone un sistema productivo diseñado en un FMS (Sistema de Manufactura Flexible), considerando maquinaria de tecnología avanzada con el objeto de hacer frente al cambio del tipo de producto a través de la flexibilidad de las máquinas. El sistema tiene 4 líneas de procesamiento, cada línea puede tener hasta 6 estaciones de trabajo. Las líneas de procesamiento que no cuentan con el número máximo de estaciones de trabajo se consideran líneas extraordinarias donde su característica principal es su capacidad de producción, es decir, procesan un número mayor de piezas en un tiempo determinado. La Figura 1 muestra la configuración del sistema de producción por línea.

Cada estación de trabajo realiza la misma operación para cada una de las líneas de producción, no obstante, las características de la maquinaria utilizada pueden variar en las diferentes líneas de producción para una estación de trabajo. Por lo tanto, la capacidad de producción puede ser distinta. La Tabla 1 muestra el tiempo de procesamiento de cada una de las líneas de producción para cada producto.
Tabla 1 Tiempo de procesamiento (minutos)
| Línea de producción | Producto | Estación de trabajo 1 | Estación de trabajo 2 | Estación de trabajo 3 | Estación de trabajo 4 | Estación de trabajo 5 | Estación de trabajo 6 |
|---|---|---|---|---|---|---|---|
| Línea 1 | A | 10.5 | 15.3 | 15.7 | 5.4 | 10.4 | 5.3 |
| B | 18.3 | 20.4 | 24.4 | 9.5 | 15.3 | 7.5 | |
| C | 15.2 | 24.6 | 20.2 | 8.6 | 14.7 | 6.6 | |
| D | 20.6 | 18.3 | 22.5 | 6.4 | 15.4 | 7.3 | |
| E | 9.7 | 14.2 | 18.7 | 5.7 | 10.8 | 5.6 | |
| Línea 2 | A | 9.1 | 12.1 | 13.4 | - | 8.1 | 5.3 |
| B | 15.2 | 18.5 | 20.1 | - | 13.3 | 7.5 | |
| C | 12.7 | 20.8 | 22.8 | - | 12.6 | 6.6 | |
| D | 16.3 | 17.6 | 18.9 | - | 12.5 | 7.3 | |
| E | 8.7 | 12.5 | 17.5 | - | 9.9 | 5.6 | |
| Línea 3 | A | 6.6 | - | 10.3 | - | 8.7 | 5.5 |
| B | 11.3 | - | 16.1 | - | 12.4 | 7.5 | |
| C | 10.1 | - | 14.5 | - | 10.6 | 6.6 | |
| D | 13.4 | - | 11.7 | - | 10.7 | 7.3 | |
| E | 5.5 | - | 9.8 | - | 8.8 | 5.6 | |
| Línea 4 | A | 5.6 | - | 8.4 | - | - | 5.3 |
| B | 9.4 | - | 11.2 | - | - | 7.5 | |
| C | 9.3 | - | 10.1 | - | - | 6.6 | |
| D | 10.2 | - | 9.5 | - | - | 7.3 | |
| E | 5.4 | - | 8.7 | - | - | 5.6 |
Con el propósito de evitar cuellos de botella y de mantener la asignación en la línea de producción a la que fue asignada, la secuencia se mantiene mientras sea posible. En el supuesto de que la línea no contara con la estación de trabajo para continuar la secuencia de producción, se selecciona de forma aleatoria una de las líneas de producción que contenga la estación faltante de la línea asignada. Una vez ejecutada la acción de procesamiento en la estación de trabajo seleccionada, si es posible, la secuencia de procesamiento regresa a la línea de producción a la cual fue asignada inicialmente; de lo contrario, se selecciona la estación de trabajo siguiente de forma aleatoria.
Durante la secuencia de procesamiento existe la posibilidad de cambio de línea de producción, por lo tanto, existe un tiempo de traslado entre líneas, de almacén a línea y de línea a almacén. Los tiempos se representan en la Tabla 2.
Simulador
El simulador del sistema productivo calcula el tiempo total de procesamiento y el tiempo total de demora, considerando solo como entrada la asignación de lotes de producción a cada una de las líneas de procesamiento. La Figura 2 muestra las faces del proceso de simulación.

Es importante señalar que la simulación es una evaluación a través de la cual se pueden obtener respuestas o resultados acerca del comportamiento del sistema analizado, y donde el comportamiento de un modelo, es la relación de causa y efecto con las mismas o similares a las del sistema original (López et al., 2019 ).
Entrada
La entrada del simulador consiste en asignar una orden de producción o lote de producción a una de las líneas del sistema productivo. El problema plantea la producción de 10 lotes de fabricación hasta con 5 productos diferentes. La Tabla 3 muestra el listado de lotes de producción y la cantidad de piezas por producto.
Tabla 3. Lotes de producción
| Núm. de lotes de producción | Piezas del producto A | Piezas del producto B | Piezas del producto C | Piezas del producto D | Piezas del producto E |
| Lote 1 | 1250 | 779 | 480 | 0 | 2450 |
| Lote 2 | 800 | 1310 | 540 | 529 | 1890 |
| Lote 3 | 930 | 1220 | 335 | 745 | 2100 |
| Lote 4 | 1000 | 740 | 0 | 1260 | 1750 |
| Lote 5 | 750 | 1045 | 0 | 1379 | 1520 |
| Lote 6 | 0 | 459 | 670 | 980 | 1059 |
| Lote 7 | 980 | 890 | 245 | 845 | 1450 |
| Lote 8 | 745 | 467 | 689 | 654 | 1578 |
| Lote 9 | 384 | 1130 | 523 | 930 | 1800 |
| Lote 10 | 654 | 890 | 789 | 768 | 0 |
La asignación del número de lote a la línea de producción está representada por el vector entrada, de tamaño igual al número de lotes de producción donde cada uno de los elementos del vector corresponde por lo menos a una línea de producción. Las posiciones del vector hacen referencia al número de lote y el número asignado a cada posición indica la línea de producción a la que fue asignado dicho lote. Para que el vector se considere completo debe contener todas las líneas de producción. La Figura 3 muestra el vector de entrada o vector de asignación.

El vector entrada hace referencia a los 10 lotes de producción de forma ordenada de izquierda a derecha y de menor a mayor, es decir 1, 2, 3… 10. Para cada lote se asigna la línea de producción entre [1,4], que llevará a cabo el procesamiento. Para que el vector entrada sea válido, debe contener las 4 líneas de producción.
Inicialización de datos
La etapa de inicialización de datos requiere de cargar e inicializar todos los datos y variables relacionadas con el proceso de simulación, que implica los dos puntos siguientes:
Cargar los datos del tiempo de procesamiento (Tabla 1), el tiempo de traslado de los productos (Tabla 2) y el número de piezas de cada lote de producción (Tabla 3).
Inicializar las siguientes variables en 0: hora de llegada del lote producción a la estación de trabajo o almacén, hora de inicio del procesamiento del lote de producción, tiempo de procesamiento del lote de producción en cada estación de trabajo y el tiempo de transporte de cada lote de producción.
Asignación de la línea de producción
El vector entrada (Figura 3), muestra la asignación de la línea de procesamiento para cada lote de producción. Cada línea procesa el lote asignado de forma continua a las demás líneas en el orden que le fue asignado (lote 1, 2, 3, … 10). La secuencia de procesamiento está sujeta a las siguientes reglas:
Todos los productos de un mismo lote de producción son asignados a una misma línea de producción.
Si la línea de producción a la cual fue asignado el lote para su procesamiento no cuenta con todas las estaciones de trabajo, el lote pasará de forma aleatoria a otra línea que contenga la estación de trabajo, siempre y cuando se requiera para su procesamiento.
El lote debe ser procesado en las estaciones de trabajo de la línea de producción a la que fue asignado.
La Figura 4 muestra la asignación de lotes de producción a cada una de las líneas en forma continua, así como la secuencia en que serán procesados para cada línea de procesamiento. Si la estación de trabajo 1 de las diferentes líneas de producción termina con el lote en proceso, continúa con el procesamiento del siguiente lote asignado a la línea de producción. Se muestra el flujo de procesamiento de la línea de producción número 4.

Tiempo de procesamiento
Para cada lote de producción, el tiempo de procesamiento, transporte, demora, arribo, inicio y término en cada estación de trabajo se determinan de acuerdo con lo siguiente:
Tiempo de procesamiento y transporte: Para cada estación de trabajo se determina el tiempo de procesamiento de cada lote y el tiempo de transporte a su siguiente estación o almacén de producto terminado.
Donde:
i = Lotes de producción [1,n]
n = Número de lotes de producción
j = Productos [1,m]
m = Número de productos
k = Estación de trabajo [1,h]
h = Número de estaciones de trabajo
l = Líneas de producción [1,f]
f = Número de líneas de producción
b k ij = Lote de producción i del producto j en la estación
de trabajo k
u ij = Lote de producción i del producto j
c jk = Producto j en la estación de trabajo k
Tp k ij = Tiempo de procesamiento de b k ij
L ij = Número de piezas de u ij
Tp k = Tiempo de proceso de c jk
Tiempo de arribo: Para cada estación de trabajo, el tiempo de arribo se determina por los tiempos de procesamiento de las estaciones de trabajo anteriores, más los tiempos de transporte. Para determinar el tiempo de llegada a la estación de trabajo 1 se considera el tiempo de salida del almacén de materia prima más el tiempo de transporte a la estación de trabajo.
Donde:
Ta k = Tiempo de arribo a la estación de trabajo k
T s = Tiempo en que sale la materia prima del almacén
TT MP = Tiempo de transporte de la materia prima a la línea de producción
Tak-1 = Tiempo de arribo a la estación de trabajo k-1. Cuando k=1, cuando k = 1, Ta k-1 = T s + TT MP
Tiempo de inicio: Para cada estación de trabajo el tiempo de inicio será igual al tiempo de finalización del lote que se encuentre en proceso, si no hay lote en proceso entonces el tiempo de inicio será igual al tiempo de arribo.
Donde:
Tiempo de demora: El tiempo que demora del producto j del lote producción i en ser procesado por la estación de trabajo k. Se determina realizando la diferencia del tiempo de inicio y el tiempo de arribo del producto a la estación de trabajo.
Donde:
TD k = Tiempo de demora en la estación de trabajo k
Funciones objetivo
Función objetivo 1: Tiempo total de procesamiento.
Donde:
TAPT i = Tiempo de llegada del lote i al almacén de producto terminado
TAMPi = Tiempo de salida del lote i del almacén de materia prima
Función objetivo 2: Tiempo total de demora.
Optimización del sistema de producción
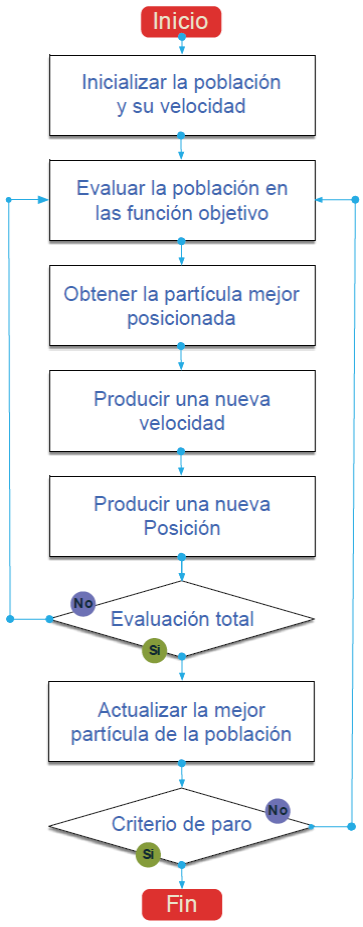
El método de optimización “Particle Swarm Optimization” también conocido por sus siglas en inglés como PSO, propuesto por Kennedy & Eberhart (1995), a grandes rasgos funciona a través de una población de partículas que operan en un espacio de búsqueda acotado. En cada iteración se obtienen nuevas posiciones para las partículas por medio de una velocidad que se determina, considerando la mejor posición global y la mejor posición actual de cada partícula. La calidad de la población se determina evaluando los individuos en la función objetivo cada vez que toman una nueva posición. La selección de los individuos de la población dependerá de los operadores del método, en cada iteración los elementos de la población comparten información, permitiendo acercarse con mayor o menor rapidez a la solución global del problema (Cuevas et al., 2017). El uso del algoritmo PSO tiene la ventaja de no tomar en cuenta el gradiente del problema a optimizar, basándose directamente en la medida de aptitud en el proceso de optimización (Pedersen & Chipperfield, 2010 ). En la actualidad existen diferentes heurísticas como las que proponen Holland (1975) y Goldberg (1989) conocida como algoritmos genéticos; Dorigo et al. (2006) plantean el algoritmo de optimización basado en la colonia de hormigas, Lee & Geem (2004) presentan el algoritmo de optimización búsqueda de armonía, Karaboga & Basturk (2007) introduce el algoritmo de optimización llamado colonia de abejas artificiales, Yang (2009) proponen el algoritmo de optimización conocido como luciérnaga, Husseinzadeh (2011) implementa el algoritmo campeonato de liga, Eskandar et al. (2012) desarrollan el algoritmo ciclo del agua, Sadollah et al. (2013) plantean el algoritmo explosión de minas. De las heurísticas mencionadas, el algoritmo PSO ha sido mayormente utilizado por investigadores gracias a la facilidad de implementación y a su eficiencia en la solución de problemas complejos de optimización (Ben-Guedria , 2016). La Figura 5 muestra la metodología básica del PSO.
Inicialización de la población y la velocidad
La población inicial está compuesta por 500 partículas (vector entrada), obtenidas de forma aleatoria y con las características siguientes:
El número de elementos de cada vector entrada debe ser igual al número de lotes de producción.
Los elementos de cada vector entrada están en el intervalo [1,f] de números enteros.
Cada vector entrada debe contener f líneas de producción.
Para la primera iteración la velocidad se inicializa con un valor igual a cero.
Evaluación de la población en la función objetivo
La optimización de cada función objetivo se obtiene de forma independiente considerando que ambas tienen la misma relevancia en la toma de decisiones. Cada individuo de la población es evaluado para cada función objetivo, obteniendo de ambas el mejor valor global.
Velocidad de las partículas
Para el cálculo de velocidades posteriores se utiliza la ecuación 8.
Donde:
v t+1 = Velocidad en la iteración t + 1
v t = Velocidad en la iteración t
Nueva posición de las partículas
La nueva posición de las partículas se obtiene por la ecuación 9.
Donde:
x t+1 = Nuevas posiciones de las partículas
La partícula o vector entrada está conformado por valores enteros en el intervalo [1,f], la nueva posición tiene valores continuos, para obtener valores enteros se redondean a cero los valores decimales y se comprueba que los elementos se mantengan en el intervalo, de lo contrario serán sustituidos de forma aleatoria.
El algoritmo de optimización se mantiene hasta que se cumpla la condición de paro (número de iteraciones).
Resultados
El simulador del sistema de producción se evalúa y optimiza para cada una de las funciones objetivo de forma independiente y en forma conjunta a través de pesos ponderados.
La función objetivo 1 y 2 se evalúan por separado en el PSO considerando 10, 15, 20 y 25 iteraciones, con 500, 400, 350 y 300 partículas, respectivamente. La solución óptima resultante en las 4 evaluaciones se representa en la Tabla 4.
Tabla 4 Solución óptima de la función objetivo 1 y 2
| Solución óptima de la función objetivo 1 | Solución óptima de la función objetivo 2 |
| 4444414342 | 4443414442 |
| Tiempo total de procesamiento | Tiempo total de demora |
| 97,741.1019 min | 65,208.1802 min |
La secuencia de estaciones de trabajo que siguió el sistema productivo para obtener los valores óptimos de las funciones objetivo 1 y 2, están presentes en el anexo, Tablas A.1 y A.2, respectivamente.
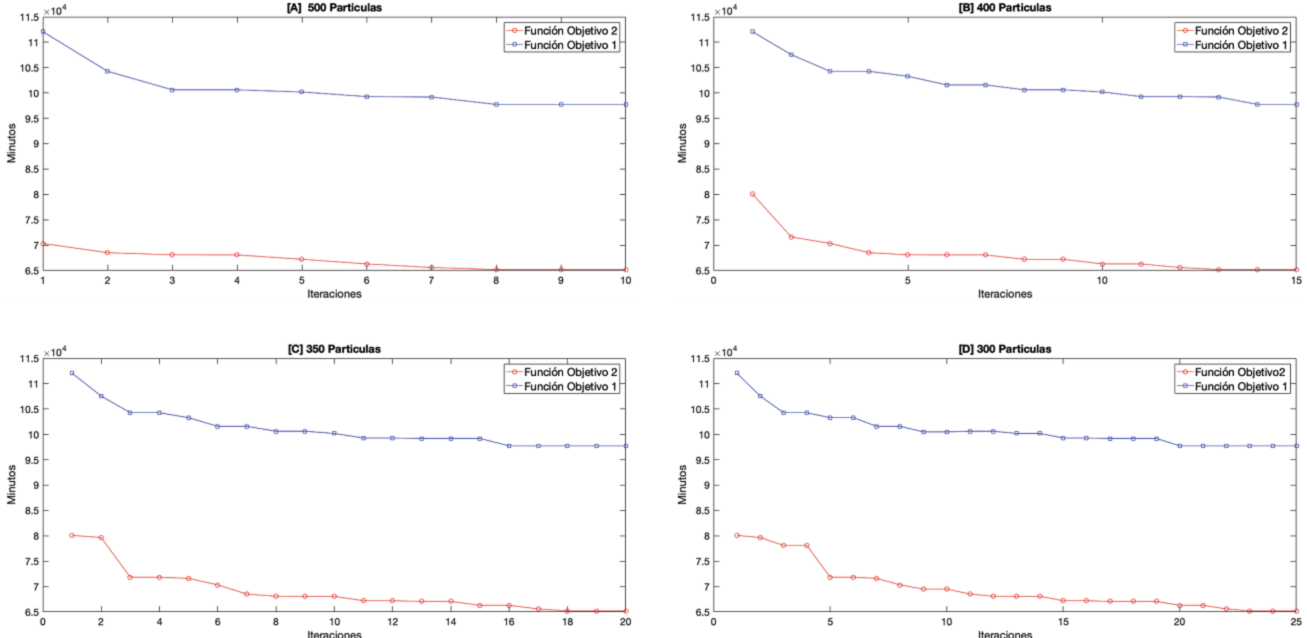
La Figura 6 muestra las 4 gráficas de optimización de las funciones objetivo considerando diferente número de iteraciones y de partículas. La gráfica A muestra los resultados de optimización considerando 500 partículas y 10 iteraciones, la gráfica B muestra los resultados de optimización considerando 400 partículas y 15 iteraciones, la gráfica C muestra los resultados de optimización considerando 300 partículas y 20 iteraciones y la gráfica D muestra los resultados de optimización considerando 300 partículas y 25 iteraciones.
La Tabla 5 muestra las soluciones óptimas de la función objetivo 1 y 2 (pesos ponderados), considerando 500 partículas y 10 iteraciones.
Tabla 5 Solución óptima de la función objetivo 1 y 2 considerando pesos ponderados
| Peso Objetivo 1 | Solución | Tiempo total de procesamiento (min) | Tiempo total de demora (min) | Peso objetivo 2 |
|---|---|---|---|---|
| 90 % | 4 4 4 4 4 3 4 2 1 4 | 99,563 | 67,886 | 10 % |
| 80 % | 4 4 4 4 3 2 4 4 4 1 | 100,460 | 68,340 | 20 % |
| 70 % | 4 4 4 4 3 1 4 4 4 2 | 100,160 | 68,020 | 30 % |
| 60 % | 4 4 3 4 4 1 4 4 4 2 | 101,460 | 69,310 | 40 % |
| 50 % | 4 4 4 4 4 2 3 4 1 4 | 100,680 | 68,870 | 50 % |
| 40 % | 4 4 4 4 4 2 4 1 3 4 | 99,713 | 67,829 | 60 % |
| 30 % | 4 4 4 4 4 2 4 1 4 3 | 102,630 | 70,660 | 70 % |
| 20 % | 4 4 4 4 4 1 3 4 4 2 | 100,180 | 68,050 | 80 % |
| 10 % | 4 4 4 4 4 3 4 1 4 2 | 101,480 | 69,490 | 90 % |
La Figura 7 muestra la correlación que existe entre el tiempo total de procesamiento y el tiempo total de demora.

Conclusiones
En la actualidad, la diversidad de productos mantiene los niveles competitividad, sin embargo, la asignación errónea de órdenes de producción en sistemas flexibles ocasiona tiempos de entrega fuera de las fechas establecidas, niveles de inventario mayores a los programados en la línea de producción, costos directos e indirectos por encima de lo planeado. El problema planteado muestra, a través del simulador, resultados con valores mucho mayores al valor de la solución óptima con tan solo asignar un lote de producción a una línea diferente, de ahí la importancia de la planeación y programación de órdenes de producción. Hoy por hoy, un número importante de empresas realizan la asignación de órdenes de producción basados en la experiencia y en la intuición del equipo o persona encargada de tomar la decisión, a pesar de ello, la mayoría de las veces la decisión tomada no es óptima. Los problemas combinatorios suelen tener un espacio bastante grande de soluciones, donde seleccionar la solución óptima tiende a ser complejo y con tiempos de respuesta no favorables para la industria. El número de soluciones a evaluar en el simulador dependerá de las combinaciones de asignación de lotes de producción a las líneas de fabricación, el problema considera 10 lotes, por lo tanto el número de combinaciones posibles (soluciones) es igual a 10!
El sistema de producción tiene un intervalo de variabilidad [0,3] % en el resultado final para una solución, esto se debe a la aleatoriedad que existe en la selección de la línea de producción. No obstante, el algoritmo de optimización mantiene la solución óptima como se observa en la Figura 6. Los resultados muestran correlación, la solución óptima de una de las funciones objetivo afecta al óptimo de la otra. Por lo tanto, la persona que tome la decisión de la selección de la solución del sistema de producción debe considerar priorizar una de las funciones objetivo.
Tomando en cuenta la prioridad de las funciones objetivo, se plantean 9 escenarios diferentes relacionados con pesos ponderados con variabilidad de 10 %. Los resultados muestran valores por encima de los valores óptimos. Estos resultados sirven de referencia para que el personal tome la decisión correcta de acuerdo con las circunstancias del sistema de producción.
El algoritmo de optimización PSO obtiene resultados favorables considerando un número de partícula y de iteraciones relativamente pequeño, el tiempo estimado en obtener el óptimo es de 10 s donde las características del sistema de cómputo utilizado son: Procesador i5, 4 MB de RAM y disco duro de 120 GB.
Como trabajo futuro, se propone evaluar al sistema de producción en algoritmos de optimización de nueva generación y multi-objetivo con el propósito de minimizar aún más los valores óptimos que hasta el momento se han obtenido, así como el intervalo de variabilidad de los valores de las funciones objetivo.

