











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
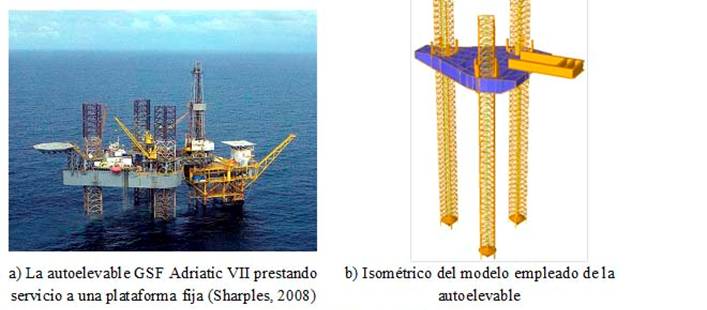
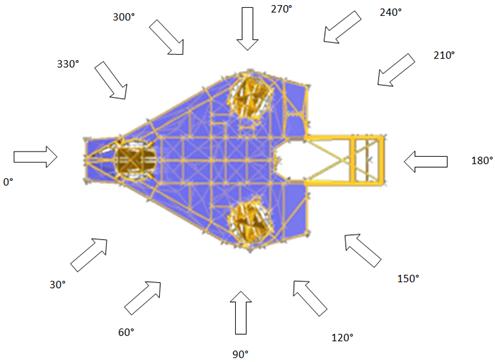
En diferentes zonas marinas de explotación petrolera del mundo, prestan servicio centenares de plataformas autoelevables de diferente tipo y dimensiones. Estas, móviles e híbridos de plataformas fijas y flotantes, se utilizan en distintas épocas del año y afrontan condiciones metoceánicas, suelos y profundidades muy diversas. Prestan servicio, principalmente de perforación, a plataformas marinas fijas con diferentes dimensiones, u operan individualmente, por un tiempo dependiente de las actividades a realizar (Campos et al., 2012). La figura 1a muestra una autoelevable perforando para una plataforma fija y la Figura 1b muestra el modelo analítico aproximado empleado, en SACS (Bentley, 2012), de la Noble Eddie Paul (Noble Asset Mexico LLC, 2007; Offshore Magazine, 2011).
Para ejecutar un servicio, por ejemplo perforar pozos para una plataforma fija, la autoelevable pasará por:
Traslado hacia la plataforma fija en aguas libres de obstáculos
Traslado en presencia de otras instalaciones
Aproximación y acercamiento a la plataforma fija
Fijación inicial de piernas y posicionamiento final en el sitio
Elevación del casco a la altura de las operaciones
Ajuste y alineación de la torre de perforación con los pozos
Operación, perforación de pozos
Finalización de las operaciones, retiro de los voladizos
Desconexión de las zapatas del fondo marino y preparaciones en el casco para navegación
Alejamiento y traslado. Se reinicia el ciclo con el paso a) o b)
En cada paso, la autoelevable se desempeña con la seguridad estructural suficiente y necesaria ante cualquier tipo de carga o peligro natural. El presente trabajo se ocupa de la seguridad estructural en operación, paso g).
Mediante un modelo de confiabilidad estructural metoceánico se muestra el cálculo del índice de confiabilidad disponible de la autoelevable, asociado a tres estados límite. A partir de estos cálculos, dadas las condiciones del suelo y de fijación de las zapatas, se podrán estimar las condiciones metoceánicas máximas para comportamientos seguros de la plataforma.
Para el mismo lugar, con un modelo de riesgo, se definen las exigencias mínimas de seguridad y metoceánicas que debe cumplir la autoelevable para garantizar desempeños seguros y económicos. Así, el índice de confiabilidad óptimo anual obtenido tendrá un valor balanceado entre seguridad y consecuencias de falla definidas en términos económicos; se toman en cuenta la posibilidad de la pérdida de la autoelevable junto con el retiro y abandono de sus escombros, las consecuencias debido a pérdidas de vidas humanas, la remediación del medio ambiente, la pérdida de pozos y la reposición de la infraestructura dañada, a la cual la autoelevable presta servicio. Se considera la diversidad de situaciones en las que trabajan y la temporalidad en sus distintas ubicaciones. Debido a los tiempos, del orden de varios meses, en que una autoelevable permanece en una posición fija durante su operación, los niveles de seguridad deben asociarse a la caracterización del peligro metoceánico de largo plazo.
Ambos modelos, de confiabilidad y riesgo, toman en cuenta el peligro metoceánico histórico del lugar y el comportamiento estructural de las autoelevables ante las solicitaciones derivadas de dicho peligro. El modelo de confiabilidad estructural permitirá informar si la plataforma que se desea utilizar es adecuada o no respecto a los resultados del modelo de riesgo. Si es adecuada, se indicarán las condiciones en que estará trabajando y las exigencias a cumplir para operar sin la ocurrencia del colapso.
Aunque en el modelo analítico de la plataforma autoelevable que se muestra en la Figura 1b no se observan los módulos, equipos, helipuerto y la torre de perforación, el peso y fuerza laterales por efectos del viento sí se tomaron en cuenta para los análisis estructurales.
Modelo de riesgo estructural metoceánico
Riesgo global
Se aplica un formato modificado del empleado para plataformas marinas fijas por Lind y Davenport (1972), Stahl (1986) y Bea (1997) en el desarrollo de la norma NRF-003-PEMEX-2000 (PEMEX, 2000), asimismo por Campos et al. (2010) en la NRF-003-PEMEX-2007 (PEMEX, 2008). Se consideró que para el tiempo de vida de servicio estructural nominal de diseño (L), el valor esperado del costo total de la plataforma autoelevable E[C T ] (Ec. 1), que incluye estructura y sistemas, compuesto por su costo inicial, C I , y el valor esperado del costo futuro por colapso, E[C F ], debe ser mínimo.
 (1)
(1)
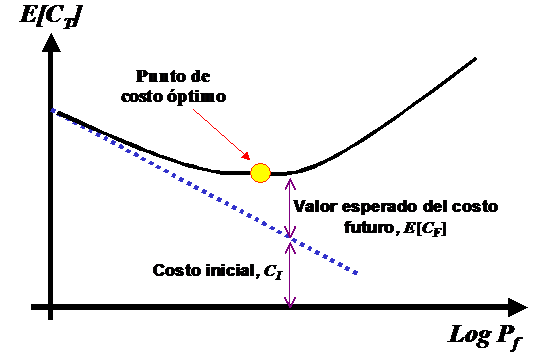
Ambos términos dependen de la probabilidad de falla anual de la autoelevable (P f ) (Lind y Davenport, 1972; Stahl, 1986; Bea, 1997), con C I =C-∆C i log P f y E[C F ]=P f C F PVF (ver Fig. 2) en donde C es una constante, ∆C i es la inversión a aplicar en la estructura de la autoelevable para reducir su probabilidad de falla anual diez veces, C F es el costo futuro de la autoelevable, que toma en cuenta las consecuencias de falla del sistema y PVF una función de valor presente que permite traer a un instante de referencia los costos devengados en el futuro. La PVF depende de una tasa neta de descuento (r) y L, tal que PVF(r,L)=[1-exp(-rL)]/r. Entonces la Ec. 1 se convierte en
 (2)
(2)
donde la derivada respecto a Pf permite obtener la probabilidad de falla total óptima anual
 (3)
(3)
y su correspondiente índice de confiabilidad óptimo es
 (4)
(4)
donde Φ (.) es la función de distribución normal estándar.
La Figura 2, que representa a la Ec. 2, muestra que para probabilidades de falla bajas, el costo inicial controla el costo total; mientras que para probabilidades de falla altas, domina el costo futuro. El punto de costo total esperado mínimo define la Pfot.
Una fracción (η) de la Pfot es la probabilidad de falla ambiental óptima anual (Pfo), asociada a los eventos metoceánicos extremos, así Pfo =η Pfot y el índice de confiabilidad ambiental óptimo a exigir es
 (5)
(5)
Formulación del costo futuro
El E[C F ], de la Ec. 1, se desglosa en los costos de consecuencias por perder vidas humanas, E[C H ], o sufrir lesiones, E[C L ], por reposición de la autoelevable E[C R ], por su retiro y abandono, E[C A ], por pérdidas de utilidad al posponer la renta de la autoelevable, E[C U ], y un porcentaje de pérdida de la plataforma fija a la cual está dando servicio en el momento del colapso, E[C P ]. Entonces
 (6)
(6)
Pérdidas debidas a fatalidad y lesiones
Se considera que la fatalidad o lesión se origina por un evento accidental de fuego y explosión igualmente probable durante el tiempo L, como una fracción constante (ζ) de la probabilidad de falla de la estructura, es decir, igual a ζPf Sean PP la probabilidad asociada con la presencia de personal en alguna hora, al menos, de una catorcena dada dentro de un año,
donde N es el número de personas en la autoelevable. Considerando que la probabilidad de falla anual es constante, se llega a
 (7)
(7)
Pérdidas por reposición, por retiro y abandono, del pozo y porcentaje de la plataforma fija
La pérdida total de la autoelevable se considera mediante el costo de reposición (CR). Se manejan valores constantes para el retiro y abandono de escombros (CA), la pérdida del pozo en ejecución (CPZ) y la fracción del costo por perder la plataforma fija a la que se presta servicio (γ CP), donde γ es un factor de reducción entre cero y uno. Como hipótesis de análisis se considera que: a) la falla y el remplazo de la estructura ocurren una sola vez en el tiempo L, y b) la falla es igualmente probable en cualquier tiempo. Así, el valor esperado de los costos mencionados es
 (8)
(8)
Pérdida de utilidad por posponer la renta de la autoelevable
Es el valor esperado de la pérdida de utilidad (
en donde
(Stahl, 1986), siendo
con
Para mantener las formas de las Ecs. 7 y 8, se introduce
 (9)
(9)
Valor esperado del costo futuro
Con las Ecs. 7, 8 y 9 se forma la Ec. 6 expandida

Entonces
 (10)
(10)
que se emplea en la Ec. 3.
Factor de reserva de resistencia
Se introduce el RSR a exigir, que se relaciona con el índice de confiabilidad óptimo anual ambiental e incertidumbres de la carga y la capacidad estructural, con valores adoptados de plataformas marinas fijas tipo jacket (Stahl, 1986; Bea, 1997; Campos et al., 2010):
 (11)
(11)
con:
BR=1.32 |
Mediana del sesgo de la capacidad |
BS=0.89 |
Mediana del sesgo de la carga lateral |
σln R/S=0.77 |
Desviación estándar de la carga más la resistencia |
σlnS=0.80 |
Desviación estándar de la carga de oleaje |
En la práctica, el RSR se obtiene de manera determinista como el cociente entre la fuerza cortante basal lateral con la que falla la estructura y una fuerza cortante de referencia. La falla la produce el perfil de cargas de la altura de ola última (Hu) aplicado en forma incremental. El cortante de referencia corresponde a la aplicación de la ola con periodo de retorno de 100 años (H100) y parámetros correspondientes. La deducción de la Ec. 11 toma en cuenta este criterio (Campos et al., 2010).
Altura de ola última y elevación del casco de la autoelevable
A partir de la H100 y del RSR (Ec. 11), se calcula Hu (Campos et al., 2010), tal que
 (12)
(12)
donde α ≈2 para plataformas controladas por la fuerza de arrastre. A su vez, Hu se emplea para calcular la elevación mínima de la cara inferior del casco de la autoelevable (ECMIN). Se estima que ECMIN = κ Hu, con κ = 0.726 aproximadamente, que considera la elevación de la cresta y las mareas astronómica y de tormenta, tal que, la ola última no impacte el casco.
Aplicación numérica del modelo de riesgo ante huracanes
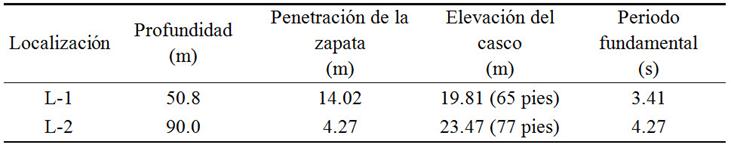
Se realiza para las localizaciones L-1 y L-2 en la Sonda de Campeche, México. La Tabla 2 muestra la profundidad y la H100, u ola de referencia de cada lugar según Oceanweather, Inc. (OWI, 2006). Se calculan los índices de RSR confiabilidad total y ambiental óptimos anuales y valores de a exigir (Tabla 1), también la Hu y la ECMIN (Tablas 2 y 3).



Asignación de valores en el algoritmo de riesgo
Algunos términos ya se conocen y se manejan como constantes, otros se emplean como variables para el análisis paramétrico.
Valores constantes
Se asignaron valores constantes a: r = 0.075 (Campos et al., 2010), d = 200 días, L = 30 años, CPZ= 20 millones de dólares de Estados Unidos (MMUSD), CA= 10 MMUSD, CP= 500 MMUSD. Se obtienen λ= 0.72 y PVF(r,L)=11.93 No se consideran tripulación en las plataformas y afectación al medio ambiente por cierre de pozos por mandato del plan de emergencias de PEMEX (1997) ante la presencia de huracanes.
Asignación de los valores variables
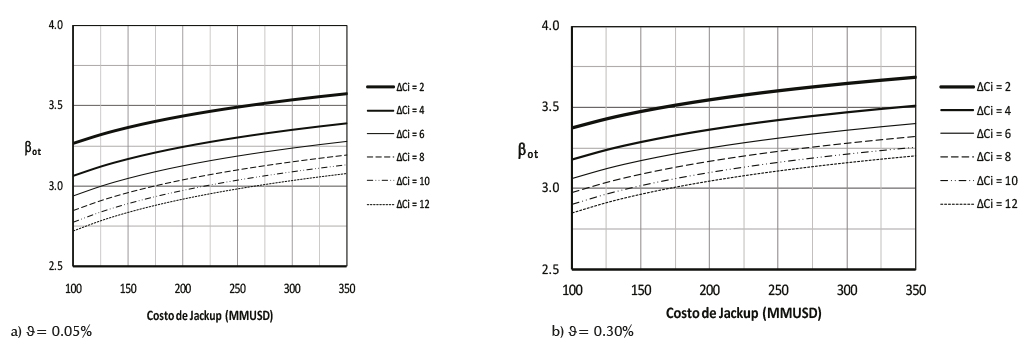
Se cubre un grupo amplio de autoelevables al emplear valores de costo inicial o reposición, CR de 100 a 350 MMUSD (Kaiser y Snyder, 2012). Y, para tomar en cuenta diferentes niveles de seguridad global se emplean valores válidos para el ΔCi, de 2 a 12 MMUSD.
La utilidad de la autoelevable (U), proviene de su renta diaria que es un porcentaje υ de su costo, tal que U = 365 υ CR; incluso, se considera variable para un mismo costo de la autoelevable, así a υ se le asignan los valores de 0.05% y 0.30%.
Finalmente, se considera la pérdida de la plataforma fija a la cual la autoelevable proporciona servicio mediante dos escenarios: no hay pérdida o la autoelevable está brindando un servicio individual (γ=0) y la pérdida es total (γ=1).
Estimación de los índices de confiabilidad anual por riesgo
Las Figuras 3 y 4 muestran resultados para la Ec. 3. Se observa que al aumentar el costo o la utilidad por la renta de la autoelevable, el índice de confiabilidad total crece; pero, si el ΔCi aumenta, dicho índice se reduce. Se encuentra que el índice de confiabilidad total óptimo anual tiene un valor mínimo βotMIN = 2.72 (Figura 3a) y un máximo βotMAX = 3.83 (Figura 4b).

Para estimar la probabilidad de falla ambiental se emplean factores de reducción (η) de 0.25, 0.50 y 0.75 (Bea, 1997), con la Ec. 5 se calculan sus correspondientes índices de confiabilidad y con la Ec. 11 el RSR a exigir (Tabla 1).
La Tabla 2 muestra la profundidad, la H100 y la ECMIN para el caso de los índices de confiabilidad mínimos asociados a las dos localizaciones. La Tabla 3 hace lo propio para los índices de confiabilidad máximos.
Los resultados indican que en L-2 (Tabla 3), la autoelevable debe tener, al menos, un índice de confiabilidad ambiental anual de 4.16 y un RSR de 2.57, con una elevación mínima del casco de 17.46 m.
Modelo de confiabilidad estructural
Se emplea el índice de confiabilidad de Cornell para obtener el índice de confiabilidad estructural, como capacidad disponible, de las autoelevables ante huracanes. Se consideran tres estados límite: el volteo de la autoelevable, el hundimiento o deslizamiento horizontal de algunas de sus zapatas.
Así, si Z es la función de estado límite que relaciona la resistencia R y la solicitación S, tal que
 (13)
(13)
el índice de confiabilidad (β) se calcula como,
 (14)
(14)
donde μs es la media de la solicitación, μr es la media de resistencia, σs y σr son las deviaciones estándar de la solicitación y resistencia, respectivamente. Y la probabilidad de falla (PF) de la plataforma es
 (15)
(15)
Como la ocurrencia de huracanes sigue un proceso de Poisson con una tasa media de ocurrencia (ν), entonces la probabilidad de falla anual (PF) de la plataforma se estima como
 (16)
(16)
y su índice de confiabilidad anual ambiental disponible
 (17)
(17)
el cual, además, podrá compararse con los resultados del modelo de riesgo para decidir si la autoelevable es adecuada o no.
Falla por volteo
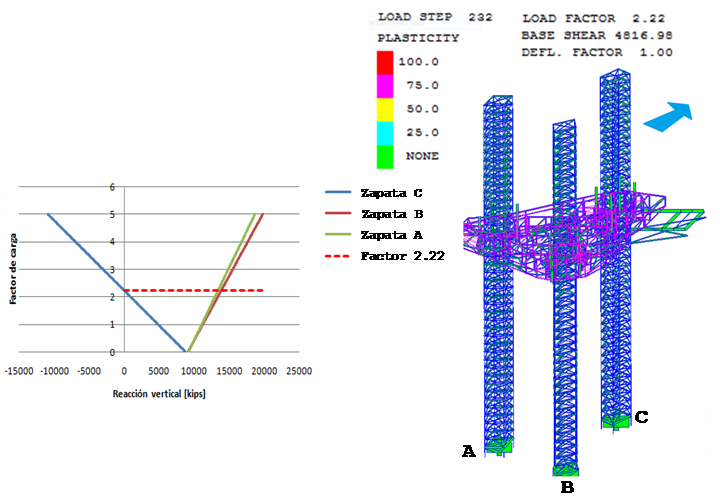
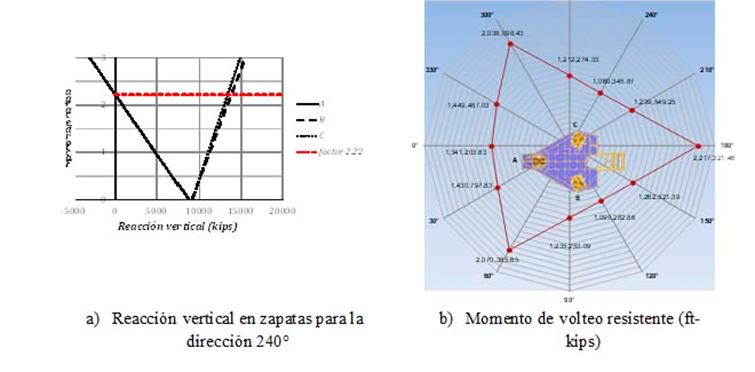
Este colapso ocurre cuando una de las zapatas empieza a trabajar a tensión, lo que se interpreta como un levantamiento y separación de la zapata del suelo. La Figura 5 ilustra esta falla con la gráfica que muestra inicialmente a las tres piernas con una reacción de compresión similar, pero luego, al incrementarse las cargas laterales de oleaje, dos piernas, las designadas como A y B, incrementan su reacción a compresión, mientras que en la otra, la C, la reacción vertical se reduce hasta llegar a cero.
Una alternativa para el cálculo del momento de volteo resistente la proporciona Det Norske Veritas (DNV) (2012), con la que resultan valores conservadores, los cuales no se emplearon aquí.
La función de estado límite por volteo se aplica por
 (18)
(18)
en donde Mr es el momento de volteo resistente, calculado mediante un análisis estático no-lineal con carga incremental, con la estructura sometida a fuerzas gravitacionales constantes y fuerzas de oleaje y corrientes que se incrementan paso a paso. Ms es el momento actuante que trata de volcar a la autoelevable.
La solicitación, considerada como una variable estocástica, es la respuesta de momento de volteo ante cargas ambientales. La media del momento actuante (μs) es un promedio pesado de la media (μs,j) de cada estado de mar j, afectada por su probabilidad de ocurrencia Oj, de los n estados de mar
 (19)
(19)
Asimismo, la suma de las varianzas del momento de volteo (
 (20)
(20)
Relaciones similares a las Ecs. 19 y 20 se utilizan para calcular la media y la desviación estándar de la carga en los otros estados límite.
Falla por hundimiento de una de las zapatas
La falla por hundimiento de una de las zapatas considera el siguiente margen de seguridad
 (21)
(21)
en donde Qz es la capacidad vertical de la zapata y Rv,i es la reacción vertical de la zapata i, para i = A,B,C. La reacción vertical en una zapata, solicitación, es una variable aleatoria con media y desviación estándar que se calculan con las Ecs. 19 y 20, respectivamente. La probabilidad de falla de cada una de las zapatas se obtiene de acuerdo con las Ecs. 14 y 15.
Asumiendo que la falla de una zapata implica la falla del sistema, la siguiente relación aplica
 (22)
(22)
ó
 (23)
(23)
Falla por deslizamiento de una de las zapatas
El margen de seguridad por deslizamiento de una zapata está dada por
 (24)
(24)
donde ZQY es la capacidad horizontal de la zapata y Rh,i es la reacción horizontal de la zapata i (solicitación). La media y desviación estándar de la solicitación Rh,i, se obtienen empleando las Ecs. 19 y 20. El índice de confiabilidad y probabilidad de falla de cada zapata se obtienen mediante las Ecs. 14 y 15. La probabilidad de falla e índice de confiabilidad por deslizamiento horizontal de cimentación se obtienen con las Ecs. 22 y 23, respectivamente.
Respuestas a oleaje
Un estado de mar se puede describir a través de su espectro de varianza de oleaje tal como
 (25)
(25)
donde se muestra que el espectro de respuesta se puede obtener empleando la función de transferencia de cierta respuesta y el espectro de oleaje.
El espectro de varianza de oleaje contiene la información estadística de la ocurrencia de varios trenes de olas harmónicas (teoría de Airy) las cuales al superponerse resultan en un tren de olas irregulares. Por otro lado, si la estructura se excita por una carga armónica, entonces, la respuesta es armónica. Tanto la elevación de la superficie del mar como la respuesta (dinámica) a oleaje tienen distribución de Gauss. Así, el espectro de respuesta contiene la información estadística de varios trenes de respuestas armónicas que al superponerse, resulta en una respuesta irregular.
Aquí se emplea el espectro de Pierson-Moskowitz de dos parámetros para describir un estado de mar
 (26)
(26)
en donde Hs es la altura de ola significante y Tp el periodo pico.
Respecto a la evaluación de la media y desviación estándar de la carga se presentan los dos enfoques que se explican a continuación.
Cargas ambientales en cada instante de una tormenta
En este caso, la media de la respuesta provocada por oleaje es nula. Esto se observa en Figura 6, donde la media de la reacción vertical por oleaje para un apoyo, tiende a cero.

Entonces, la media se puede calcular de la respuesta estática determinista de la estructura ante cargas de viento (RV ) y corriente (RC)
 (27)
(27)
La mayor incertidumbre en la carga la provoca el oleaje, por ello se incluye únicamente la desviación estándar de la respuesta por oleaje. Para un estado de mar la desviación estándar de la respuesta es
 (28)
(28)
Donde m0R es el momento de orden cero del espectro de respuesta
 (29)
(29)
Cargas ambientales en las crestas de la respuesta de una tormenta
La respuesta ante oleaje tiene la misma distribución que el oleaje: la amplitud de las olas y respuestas tienen la distribución Rayleigh, válida para espectros con bajo rango de frecuencias. Entonces, la media y la desviación estándar de la amplitud de la respuesta Ra son funciones de m 0R (Ec. 29) (Holthuijsen, 2007)
tal que
 (30)
(30)
 (31)
(31)
Distribución de tormentas
Para describir los huracanes, se recurre al enfoque de pico sobre el umbral, que consiste en establecer un umbral mínimo que defina la existencia de una tormenta e identificar un número suficiente de tormentas en una base de datos de largo plazo. Para cada tormenta, el mayor valor de altura de ola significante (Hs) es el valor pico sobre el umbral, útil para describir su distribución probabilista. La Figura 7 muestra un registro de huracanes correspondiente a 29 tormentas en 101 años (OWI, 2006), que señala el umbral inferior, valores de picos locales y valores extremos seleccionados.

La teoría extremos indica que la distribución de un máximo en una secuencia de valores arriba de un umbral se generaliza mediante una distribución de Pareto (Holthuijsen, 2007). DNV (2010) sugiere emplear una distribución Weibull de dos parámetros o una exponencial. Sin embargo, en el presente modelo se emplea la distribución de Weibull de tres parámetros, cuya acumulada se muestra por
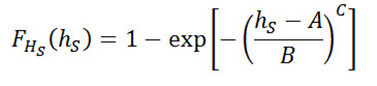 (32)
(32)
en donde A es el parámetro de localización (límite inferior de altura de ola significante), B es el parámetro de escala y C es el parámetro de forma; y la función de densidad de probabilidad (fdp) es
 (33)
(33)
Con la fdp dividida en intervalos suficientes, se obtiene un histograma de los estados de mar extremos caracterizados por la Hs Se calculan los demás parámetros metoceánicos asociados a ella. Con la ocurrencia de estos estados de mar por dirección se obtienen los diagramas de dispersión de ola de cada sitio. También es posible asumir que la orientación de la estructura se desconoce y que la ocurrencia en todas las direcciones es la misma.
Aplicación numérica del modelo de confiabilidad
Se realizaron análisis estáticos-lineales-elásticos para determinar las reacciones verticales y horizontales en las zapatas; estáticos no lineales con carga incremental del oleaje, paso a paso, considerando piernas elásticas, hasta producir el colapso por volteo; asimismo, el modal y lineales dinámicos. La Tabla 4 muestra información en cada ubicación.
A cada estado límite le corresponde una dirección de análisis, o dirección crítica, que se definió a partir de la aplicación de los parámetros metoceánicos, extraídos de la NRF-003-PEMEX-2007, en las 12 direcciones mostradas en la Figura 8. Se considera que las capacidades a hundimiento y deslizamiento horizontal de zapata son constantes e iguales al valor menor de ambas localizaciones, y las direcciones de análisis serán aquellas en las que se exige más a una zapata. Asimismo, para el momento de volteo se selecciona aquella con menor resistencia a dicha acción.
En la Figura 9 se muestran la función de distribución y de densidad de probabilidades de la ocurrencia de huracanes de cada ubicación. Con parámetros, para L-1, A=2.318, B=2.506 y C=1.059, y para L-2, A=1.521, B=3.304 y C=1.212.

Como capacidad vertical de las zapatas se emplea el valor de 12,399 kips (55,153 kN) igual a la precarga, de acuerdo a su geometría y características del suelo. Para la capacidad lateral se emplea 213.34 kips (949 kN). Ambas ocurren en L-2.
Momentos de volteo resistente y reacciones verticales y horizontales máximas en zapatas
La Figura 10b muestra valores de momento de volteo resistente, ocurriendo el menor hacia 240° para dicha dirección, la Figura 10a muestra la reacción vertical en cada zapata e, incluso, cuando ocurre el desprendimiento de la C, instante en que las A y B presentan una reacción de 13,400 kips (59,600 kN).
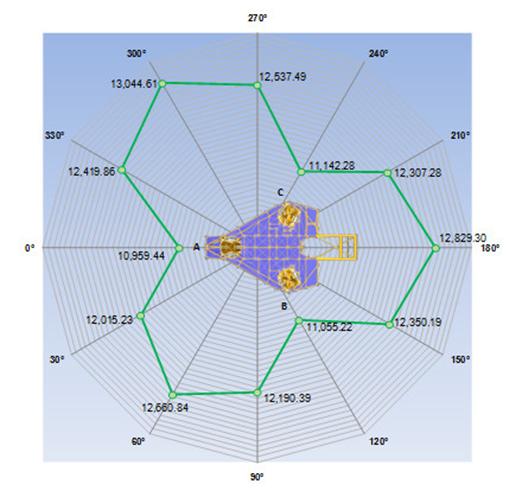
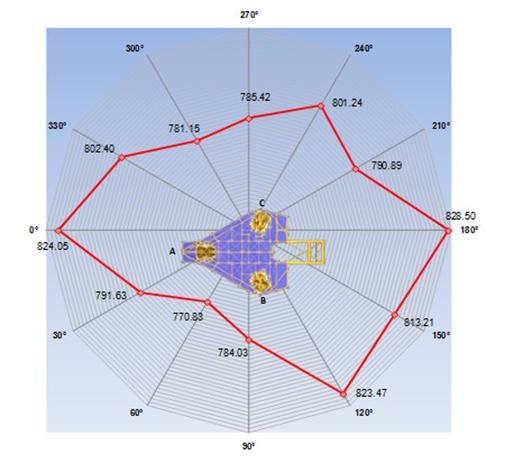
La Figura 11 muestra que, para el estado límite al hundimiento, la máxima reacción vertical en una de las zapatas, de 13,045 kips (58,027 kN) ocurrió para la dirección 300°. La Figura 12 muestra que la mayor reacción horizontal, de 828 kips (3,683 kN), ocurre para la dirección 180°. Los mismos análisis se realizaron para la L-2. La Tabla 5 muestra los resultados principales para ambas ubicaciones.

Cálculo de los índices de confiabilidad estructural
La confiabilidad para cada estado límite se calcula para la dirección indicada en la Tabla 5. Para cada estado de mar se calcula el valor medio de la carga con análisis estático y la deviación estándar mediante análisis dinámico. Luego, se obtuvieron los índices de confiabilidad con la Ec. 14, cuyos resultados para la L-2 se muestran en las Tablas 6 y 7; donde el índice más bajo fue de 5.6, correspondiente a la falla por deslizamiento horizontal de una zapata. El mismo proceso se realiza para la L-1, la Figura 13 muestra los índices de confiabilidad de las autoelevables para ambas localizaciones.



Para estas aplicaciones el modo de falla dominante es el deslizamiento de una zapata. Además, se aprecia que a mayor profundidad menor será el índice de confiabilidad para cada estado límite, apreciación que se manifiesta en la localización L-2, con mayor profundidad, donde la confiabilidad de la plataforma autoelevable es menor para todos los casos analizados.
El índice de confiabilidad estructural debe ser anual para compararse con las exigencias del modelo de riesgo. Mediante las Ecs. 16 y 17 se calculan la probabilidad de falla anual e índice de confiabilidad anual respectivamente, para los índices de confiabilidad más bajos presentados en la Figura 13, asociados al deslizamiento horizontal. Para la ocurrencia de huracanes se empleó la tasa de excedencia ν =0.1asociada al periodo de retorno mínimo de 10 años. La Figura 14 muestra la confiabilidad anual, en capacidad de las autoelevables en ambas localizaciones con valores mayores respecto a las exigidas por el modelo de riesgo, por ello es adecuado el empleo de la autoelevable.

Conclusiones
Modelo de riesgo estructural metoceánico
Se mostró un modelo de riesgo que permite obtener los índices de confiabilidad anuales y RSR’s mínimos a exigir a una plataforma autoelevable, los parámetros metoceánicos máximos que deben soportar y la elevación mínima de la cara inferior del casco de la autoelevable, para cualquier localización.
Se mostró el cálculo de índices de confiabilidad con un análisis paramétrico con valores posibles de las variables que influyen en él. Por ejemplo, como variables se empleó el costo de las autoelevables de 100 a 350 MMUSD, el ΔCi de 2 a 12 MMUSD, la afectación a construcciones adyacentes (γ=0,1) y la utilidad por renta diaria (υ=0.05%,0.30%).
Los índices de confiabilidad óptimos totales anuales, se asociaron con los índices de confiabilidad óptimo ambientales, que a su vez, permitieron obtener los factores de reserva de resistencia a exigir y las condiciones metoceánicas útiles para su cálculo.
Los ejemplos aplicados, indican que los valores de índice de confiabilidad ambiental anual pueden estar entre 2.94 y 4.16, que se asocian a RSR’s de entre 1.01 y 2.57. Asimismo, si empleamos los tres valores mayores de índice de confiabilidad (3.90, 4.00, 4.16) y RSR’s (2.11, 2.27, 2.57), y calculamos la correspondiente elevación mínima del fondo del casco para cada localización de estudio, se obtienen valores de entre 14.24 a 16.15 m, 14.78 a 16.77 m, y de 15.72 a 17.84 m, respectivamente, que se asocian a alturas de ola última de 19.61 a 24.58 m.
Se ha mostrado un panorama de posibles valores para los intervalos de niveles de seguridad, condiciones metoceánicas y elevación mínima del casco. Para casos particulares, se definen de manera específica el modelo estructural de la autoelevable a emplear en cada ubicación, la información de sus costos reales, de sus rentas diarias, de su durabilidad, etcétera. En el modelo de riesgo, dichos valores son necesarios para la obtención objetiva de resultados.
Modelo de confiabilidad estructural metoceánico
Se mostró un modelo de confiabilidad que permite el cálculo del índice de confiabilidad estructural de la autoelevable, como capacidad, dada su selección. Se requiere tomar en cuenta todas las características estructurales de la autoelevable y solicitaciones metoceánicas.
Se consideraron tres estados límite: el hundimiento de una zapata, el deslizamiento lateral de un apoyo y el volteo de la autoelevable. La carga actuante fue la metoceánica y la capacidad de la autoelevable se aplica por la cimentación. Los análisis estructurales proporcionaron la información necesaria para la aplicación del modelo de confiabilidad.
Se realizó una aplicación con un tipo de plataforma autoelevable en dos localizaciones, lo que permitió observar que a mayor profundidad el índice de confiabilidad disminuye y que el modo de falla dominante es el deslizamiento lateral de la cimentación, con un índice de confiabilidad anual de 5.99.
De ambos
Aplicando ambos modelos se puede definir si una plataforma autoelevable se puede emplear satisfactoriamente en determinado lugar con condiciones metoceánicas intensas.
En los casos de aplicación numérica, el máximo valor de la confiabilidad anual del estudio de riesgo es 4.16 (Tabla 1), que es menor al índice de confiabilidad anual más bajo, obtenido por capacidad, que es 5.99. Esto significa que la plataforma autoelevable elegida tendrá un buen desempeño en ambas ubicaciones.
Esto mismo significa que las capacidades en términos del factor de reserva de resistencia a obtener a partir de los análisis de confiabilidad también estarán por arriba de los mínimos exigidos por el estudio de riesgo. Es importante mencionar que también la altura de ola que podrá soportar la plataforma será mayor que la mínima exigida.

