











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. Introducción
La cimentación es una parte estructural que se localiza por debajo de la superficie del suelo y que transmite las cargas de la estructura al suelo o roca subyacentes.
Todos los suelos, al someterlos a las cargas, se comprimen y causan asentamientos en la estructura soportada.
Los dos requisitos principales en el diseño de cimentaciones son: 1) que el asentamiento total de la estructura esté restringida a una cantidad tolerablemente pequeña; 2) que el asentamiento diferencial de las distintas partes de la estructura se elimine.
La presión del suelo debajo de una zapata depende del tipo de suelo, la rigidez relativa del suelo y la zapata, y la profundidad de la cimentación al nivel de contacto entre la zapata y el suelo.
La Figura 1 muestra la distribución de presión del suelo debajo de la zapata según el tipo de suelo y la rigidez de la zapata.

Fig. 1 Diagrama de presiones debajo de una zapata. (a) Zapata rígida sobre suelo arenoso; (b) Zapata rígida sobre suelo arcilloso; (c) Zapata flexible sobre suelo arenoso; (d) Zapata flexible sobre suelo arcilloso; (e) Distribución uniforme usada en el diseño
Los modelos matemáticos para diseño de zapatas aisladas rectangulares, cuadradas y circulares (cimentaciones poco profundas o superficiales) han despertado gran interés en diversos investigadores para obtener soluciones más simplificadas [1-13].
Los modelos matemáticos para diseño de zapatas combinadas como las rectangulares, trapezoidales, en forma de T y de esquina apoyadas sobre el terreno han ofrecido grandes beneficios en la ingeniería estructural e ingeniería geotécnica por el ahorro de tiempo en los cálculos estructurales [14-24].
Los trabajos más cercanos al tema de diseño para zapatas combinadas de correa en esquina son: Yáñez-Palafox et al. [21] desarrollaron un modelo matemático para diseño de zapatas combinadas de correa para dos columnas (una columna de frontera y la otra interior), por lo tanto, no se puede usar para obtener el diseño para zapatas de esquina.
Luévanos-Rojas et al. [23] propusieron un modelo matemático para diseño de zapatas combinadas de esquina para obtener el espesor y las áreas de acero de refuerzo de la zapata, esta contribución puede ser útil cuando las zapatas tienden a traslaparse una sobre otra, pero cuando las zapatas no se traslapan se deben de usar vigas de correa o de liga (zapatas combinadas de correa en esquina), es decir, las zapatas se unen mediante vigas.
Este trabajo de investigación presenta un modelo para diseño de zapatas combinadas de correa en esquina que soporta una carga concentrada y momentos alrededor de los ejes “X” e “Y” en cada columna, y la presión del suelo se considera que varía linealmente.
La primera parte de esta investigación muestra un modelo para obtener la superficie mínima o área óptima en planta. La metodología se basa en el concepto de que la integral del cortante por flexión es el momento.
El modelo tradicional considera una presión uniforme (presión máxima) del suelo sobre la zapata de esquina y las dos zapatas de borde, porque la reacción del suelo sobre cada zapata se aplica en el centro de cada zapata.
Cuatro ejemplos completos para diseño se muestran para zapatas combinadas de correa en esquina: Ejemplo 1: Lados libres en las direcciones X e Y. Ejemplo 2: Lado restringido en la dirección X y libre en la dirección Y. Ejemplo 3: Lado restringido en la dirección Y y libre en la dirección X. Ejemplo 4: Lado restringido en las direcciones X e Y.
2. Formulación matemática del modelo
Los esfuerzos en las dos direcciones ortogonales (ejes principales X e Y) son:
donde: R, MxT, MyT, A, Ix e Iy se presentan en las ecuaciones (22) a (25), y en las ecuaciones (30) y (31) de la parte 1.
2.1. Cortantes por flexión y momentos
Los momentos de acuerdo al reglamento [25] se presentan en las secciones a-a, b-b, c-c, d-d, e-e, f-f y g-g (ejes paralelos al eje X), y en las secciones h-h, i-i, j-j, k-k, l-l, m-m y n-n (ejes paralelos al eje Y) (ver Figura 2).

Los cortantes por flexión de acuerdo al reglamento [25] se presentan en las secciones o-o, b-b, d-d, p-p, q-q y r-r (ejes paralelos al eje X), y en las secciones s-s, i-i, k-k, t-t, u-u y v-v (ejes paralelos al eje Y) (ver Figura 3).

Los pasos para obtener las ecuaciones son los siguientes:
Paso 1: El cortante por flexión “Vx” sobre el eje X se obtiene por integración cerrada del volumen de presión del área formada partir del lado inferior de la zapata hasta el eje de estudio paralelo al eje “X” (el límite superior en dirección de “Y” se toma como la variable y).
Paso 2: El momento “Mx” sobre el eje X se obtiene por integración y tomando una condición conocida para evaluar las constantes de integración, por ejemplo: para el primer tramo de “ys – b ≤ y ≤ ys – b + z3b/2”, la condición conocida es “y = ys – b” y “MX = 0”, en este intervalo se obtiene MCentroC3 (momento en el centro de la columna 3); para el segundo tramo de “ys – b + z3b/2 ≤ y ≤ ys – b + z3b”, la condición conocida es “y = ys – b + 𝜉/2” (ξ = z3b para columna sin frontera y ξ = cy para columna con frontera), y “MX = MCentroC3 + Mx3”, en este intervalo se obtiene Md (momento en el límite de la zapata 3); para el tercer tramo de “ys – b + z3b ≤ y ≤ ys – z1b”, la condición conocida es “y = ys – b + z3b”, y “MX = Md”, en este intervalo se obtiene Mb (momento en el límite de la zapata 1); para el cuarto tramo de “ys – z1b ≤ y ≤ ys – cy/2”, la condición conocida es “y = ys – z1b”, y “MX = Mb”; para el tramo de “ys – z2b ≤ y ≤ ys – cy/2”, la condición conocida es “y = ys – z2b”, y “MX = 0”.
Paso 3: Los pasos 1 y 2 se desarrollan de manera similar para obtener el cortante por flexión “Vy” y el momento “My” sobre el eje Y, siendo λ = z2a para columna sin frontera y λ = cx para columna con frontera.
Las ecuaciones finales para el cortante por flexión y momento se muestran s continuación:
Para el tramo sobre el eje x-x en la zapata 3 de ys – b ≤ y ≤ ys – b + z3b/2.
Para el tramo sobre el eje x-x en la zapata 3 de:
Para el tramo sobre el eje x-x en la zapata 3 de ys – b + z3b/2 ≤ y ≤ ys – b + z3b:
Para el tramo sobre el eje x-x en la viga entre la zapata 3 y la zapata 1 de ys – b + z3b ≤ y ≤ ys – z1b:
Para el tramo sobre el eje x-x en la zapata 1 de ys – z1b ≤ y ≤ ys – cy/2:
Para el tramo sobre el eje x-x en la zapata 2 de ys – z2b ≤ y ≤ ys – cy/2:
Para el tramo sobre el eje y-y en la zapata 2 de xi – a ≤ x ≤ xi – a + z2a/2:
Para el tramo sobre el eje y-y en la zapata 2 de xi – a + z2a/2 ≤ x ≤ xi – a + z2a:
Para el tramo sobre el eje y-y en la viga entre la zapata 2 y la zapata 1 de xi – a + z2a ≤ x ≤ xi – z1a:
Para el tramo sobre el eje y-y en la zapata 1 de xi – z1a ≤ x ≤ xi – cx/2:
Para el tramo sobre el eje y-y en la zapata 3 de xi – z3a ≤ x ≤ xi – cx/2:
2.2. Cortantes por penetración o cortantes por punzonamiento
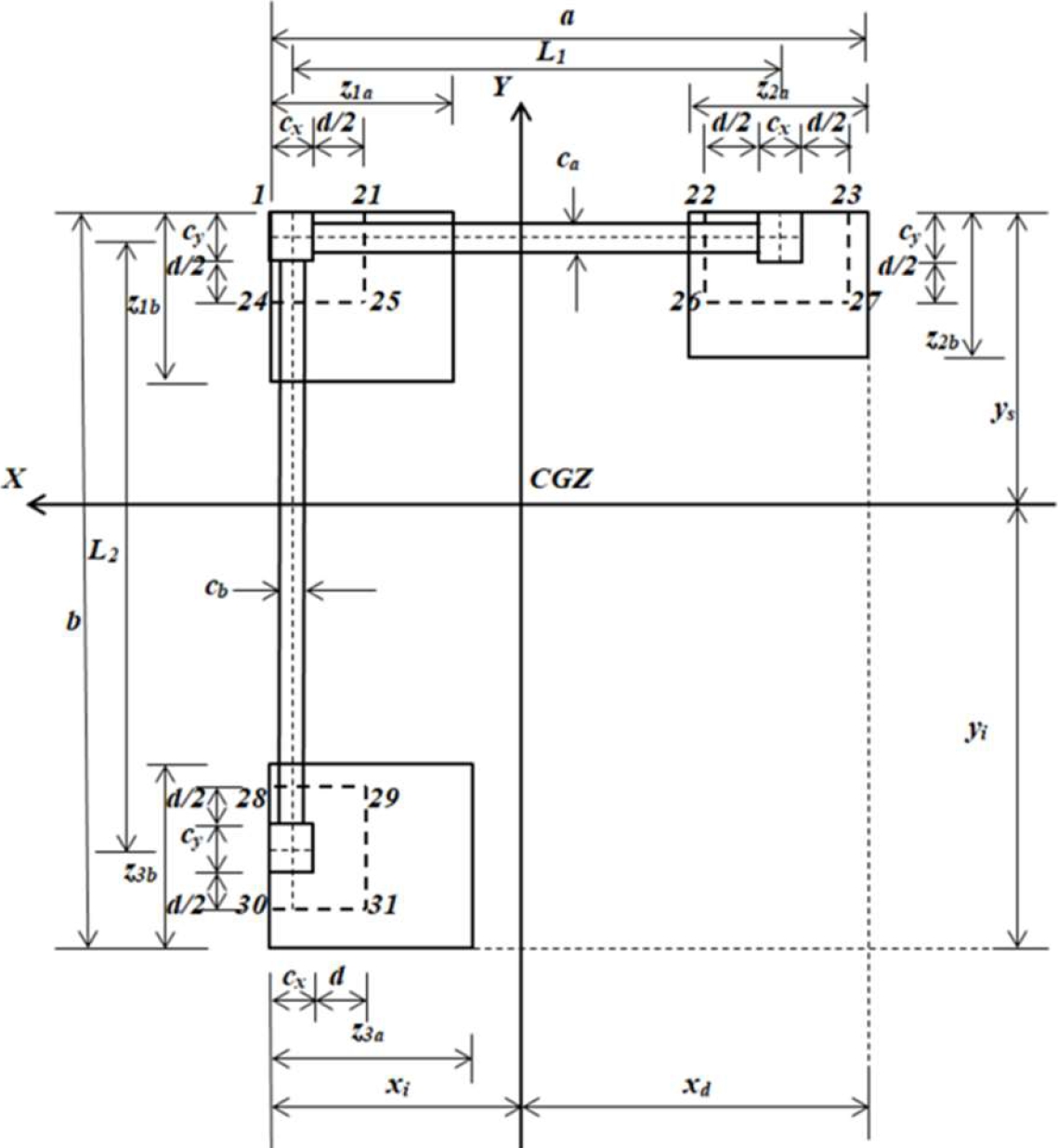
Los cortantes por penetración de acuerdo al reglamento [25] se presentan en un perímetro localizado a una distancia de d/2 a partir de la cara de la columna. Para la columna 1 el perímetro crítico está formado por los puntos 1, 21, 24 y 25.
Para la columna 2 el perímetro crítico está formado por los puntos 22, 23, 26 y 27. Para la columna 3 el perímetro crítico está formado por los puntos 28, 29, 30 y 31 (ver Figura 4).
Los cortantes por penetración de acuerdo al reglamento [25] se obtienen de la diferencia de la carga axial y el volumen de presión del área delimitada por el perímetro de la sección crítica.
Para la columna 1 es:
Para la columna 2 no limitada en la dirección X (columna de borde):
Para la columna 2 limitada en la dirección X (columna en esquina):
Para la columna 3 no limitada en la dirección Y (columna de borde):
Para la columna 3 limitada en la dirección Y (columna en esquina):
3. Aplicación numérica
En este apartado se presentan cuatro ejemplos numéricos para obtener el costo mínimo de diseño para zapatas combinadas de correa en esquina que soportan tres columnas, el diseño incluye las tres zapatas y las dos vigas que unen las zapatas como se muestra en la Figura 2 de la parte 1.
Ejemplo 1: Lados libres en las direcciones X e Y, es decir, cx/2 + L1 + z2a/2 = a y cy/2 + L2 + z3b/2 = b. Ejemplo 2: Lado restringido en la dirección X y libre en la dirección Y, es decir, cx/2 + L1 + cx/2 = a y cy/2 + L2 + z3b/2 = b. Ejemplo 3: Lado libre en la dirección X y restringido en la dirección Y, es decir, cx/2 + L1 + z2a/2 = a y cy/2 + L2 + cy/2 = b. Ejemplo 4: Lados restringidos en las direcciones X e Y, es decir, cx/2 + L1 + cx/2 = a y cy/2 + L2 + cy/2 = b. Para todos los casos se consideran: las mismas cargas y momentos, y las zapatas de diferentes dimensiones y cuadradas.
Los datos a considerar para costo mínimo de las zapatas combinadas de correa en esquina son: cx = cy = 40 cm; ca = cb = 30 cm; L1 = 8.00 m; L2 = 7.00 m; H (profundidad a la que se desplanta la zapata) = 2.0 m; PD1 = 250 kN; PL1 = 350 kN; MDx1 = 70 kN-m; MLx1 = 80 kN-m; MDy1 = 90 kN-m; MLy1 = 110 kN-m; PD2 = 550 kN; PL2 = 850 kN; MDx2 = 110 kN-m; MLx2 = 140 kN-m; MDy2 = 150 kN-m; MLy2 = 200 kN-m; PD3 = 500 kN; PL3 = 700 kN; MDx3 = 90 kN-m; MLx3 = 110 kN-m; MDy3 = 130 kN-m; MLy3 = 170 kN-m; f’c (resistencia del concreto) = 28 MPa; fy (resistencia del acero) = 420 MPa; σa (capacidad de carga admisible del suelo) = 250 kN/m2; γpez (peso específico de la zapata) = 24 kN/m3; γpes (peso específico del suelo de relleno) = 15 kN/m3.
La capacidad de carga admisible disponible del suelo “σad” se obtiene por: la capacidad de carga del suelo “σa” se le resta el peso específico de la zapata “γpez” por el espesor de la zapata, y también el peso específico del suelo de relleno “γpes” por el espesor del suelo de relleno.
Las cargas y momentos que actúan sobre cada una de las zapatas son: P1 = 600 kN, Mx1 = 150 kN-m, My1 = 200 kN-m, P2 = 1400 kN, Mx2 = 250 kN-m, My2 = 350 kN-m, P3 = 1200 kN, Mx3 = 200 kN-m, My3 = 300 kN-m.
La función objetivo para la superficie mínima (parte 1) se obtiene por la ecuación (25), y las funciones de restricción se obtienen: por las ecuaciones (2) a (24) y (26) a (33) para el ejemplo 1, por las ecuaciones (2) a (24) (26) a (31) (34) y (35) para el ejemplo 2, por las ecuaciones (2) a (24) (26) a (31) (36) y (37) para el ejemplo 3, por las ecuaciones (2) a (24) (26) a (31) (38) y (39) para el ejemplo 4.
Las superficies mínimas para las zapatas combinadas de correa en esquina se obtienen usando el software MAPLE-15.
La Tabla 1 muestra la primera solución y la solución final para el área mínima de los cuatro ejemplos.
Tabla 1 Áreas mínimas de los 4 ejemplos
| Concepto | Ejemplo | |||||||
| 1 | 2 | 3 | 4 | |||||
|
Primera solución |
Solución propuesta |
Primera solución |
Solución propuesta |
Primera solución |
Solución propuesta |
Primera solución |
Solución propuesta |
|
| σa | 250 | |||||||
| σad | 214.15 | 212.35 | 212.80 | 212.35 | ||||
| Ix | 111.70 | 116.01 | 108.81 | 114.28 | 96.94 | 98.86 | 94.11 | 97.16 |
| Iy | 169.90 | 180.02 | 143.63 | 146.89 | 168.37 | 179.08 | 141.50 | 145.94 |
| MxT | 0 | 58.69 | 0 | 201.42 | 0 | -70.29 | 0 | 71.15 |
| MyT | 0 | 267.31 | 0 | 34.27 | 0 | 267.43 | 0 | 31.37 |
| R | 3200 | 3200 | 3200 | 3200 | 3200 | 3200 | 3200 | 3200 |
| a | 9.25 | 9.30 | 8.40 | 8.40 | 9.25 | 9.30 | 8.40 | 8.40 |
| b | 8.13 | 8.15 | 8.12 | 8.15 | 7.40 | 7.40 | 7.40 | 7.40 |
| xi | 3.43 | 3.52 | 3.43 | 3.45 | 3.43 | 3.52 | 3.43 | 3.44 |
| xd | 5.82 | 5.78 | 4.97 | 4.95 | 5.82 | 5.78 | 4.97 | 4.96 |
| ys | 2.64 | 2.66 | 2.64 | 2.70 | 2.64 | 2.62 | 2.64 | 2.66 |
| yi | 5.49 | 5.49 | 5.48 | 5.45 | 4.76 | 4.78 | 4.76 | 4.74 |
| z1a = z1b | 2.07 | 2.10 | 1.90 | 1.90 | 1.93 | 2.00 | 1.75 | 1.80 |
| z2a = z2b | 2.11 | 2.20 | 2.35 | 2.40 | 2.10 | 2.20 | 2.34 | 2.40 |
| z3a = z3b | 1.85 | 1.90 | 1.83 | 1.90 | 2.08 | 2.10 | 2.04 | 2.10 |
| σ1 | 214.15 | 211.63 | 212.35 | 211.82 | 212.80 | 206.31 | 212.35 | 206.25 |
| σ2 | 214.15 | 208.51 | 212.35 | 211.37 | 212.80 | 203.32 | 212.35 | 205.86 |
| σ3 | 214.15 | 201.09 | 212.35 | 210.42 | 212.80 | 195.71 | 212.35 | 204.96 |
| σ4 | 214.15 | 197.82 | 212.35 | 209.86 | 212.80 | 192.42 | 212.35 | 204.44 |
| σ5 | 214.15 | 208.49 | 212.35 | 211.28 | 212.80 | 203.36 | 212.35 | 205.83 |
| σ6 | 214.15 | 201.06 | 212.35 | 210.33 | 212.80 | 195.74 | 212.35 | 204.92 |
| σ7 | 214.15 | 208.33 | 212.35 | 210.76 | 212.80 | 203.57 | 212.35 | 205.61 |
| σ8 | 214.15 | 200.91 | 212.35 | 209.80 | 212.80 | 195.96 | 212.35 | 204.70 |
| σ9 | 214.15 | 210.57 | 212.35 | 208.47 | 212.80 | 207.73 | 212.35 | 204.93 |
| σ10 | 214.15 | 210.49 | 212.35 | 208.46 | 212.80 | 207.66 | 212.35 | 204.92 |
| σ11 | 214.15 | 210.05 | 212.35 | 208.39 | 212.80 | 207.21 | 212.35 | 204.86 |
| σ12 | 214.15 | 207.45 | 212.35 | 208.02 | 212.80 | 204.75 | 212.35 | 204.55 |
| σ13 | 214.15 | 199.97 | 212.35 | 206.19 | 212.80 | 197.27 | 212.35 | 203.20 |
| σ14 | 214.15 | 196.71 | 212.35 | 205.63 | 212.80 | 193.99 | 212.35 | 202.69 |
| σ15 | 214.15 | 208.39 | 212.35 | 200.79 | 212.80 | 210.00 | 212.35 | 202.36 |
| σ16 | 214.15 | 207.95 | 212.35 | 200.72 | 212.80 | 209.56 | 212.35 | 202.29 |
| σ17 | 214.15 | 205.65 | 212.35 | 200.36 | 212.80 | 206.94 | 212.35 | 201.92 |
| σ18 | 214.15 | 208.47 | 212.35 | 200.80 | 212.80 | 210.08 | 212.35 | 202.37 |
| σ19 | 214.15 | 207.51 | 212.35 | 197.45 | 212.80 | 211.57 | 212.35 | 200.83 |
| σ20 | 214.15 | 204.69 | 212.35 | 197.01 | 212.80 | 208.44 | 212.35 | 200.38 |
| Amin | 14.94 | 15.61 | 15.07 | 15.51 | 15.04 | 15.77 | 15.07 | 15.72 |
Para el diseño de elementos estructurales se deben de factorizar las cargas y momentos que actúan, según el código ACI [25].
Las cargas y momentos factorizados que actúan sobre cada una de las zapatas son: Pu1 = 860 kN, Mux1 = 212 kN-m, Muy1 = 284 kN-m, Pu2 = 2020 kN, Mux2 = 356 kN-m, Muy2 = 500 kN-m, Pu3 = 1720 kN, Mux3 = 284 kN-m, Muy3 = 428 kN-m. Las cargas y momentos factorizados resultantes se obtienen por las ecuaciones (22) a (24) de la parte 1.
Los momentos que actúan sobre cada eje se obtienen según sea el caso: Sustituyendo y = ys – cy en la ecuación (9) se obtiene Ma. Sustituyendo y = ys – z1b en la ecuación (9) o en la ecuación (7) se obtiene Mb.
Sustituyendo y = yc en la ecuación (7) (intervalo ys – b + z3b ≤ y ≤ ys – z1b) o en la ecuación (9) (intervalo ys – z1b ≤ y ≤ ys – cy/2) se obtiene Mc (yc es el punto donde se ubica el momento máximo, y se obtiene derivando las dos ecuaciones e igualándolas a cero).
Sustituyendo y = ys – b + z3b en la ecuación (7) o en la ecuación (5) se obtiene Md. Sustituyendo y = ys – b + z3b/2 + cy/2 (columna sin frontera) o y = ys – b + cy (columna con frontera) en la ecuación (5) se obtiene Me.
Sustituyendo y = ys – b + z3b/2 – cy/2 (columna sin frontera) o y = ys – b (columna con frontera) en la ecuación (3) se obtiene Mf. Sustituyendo y = ys – cy en la ecuación (11) se obtiene Mg. Sustituyendo x = xi – cx en la ecuación (19) se obtiene Mh.
Sustituyendo x = xi – z1a en la ecuación (19) o en la ecuación (17) se obtiene Mi. Sustituyendo x = xj en la ecuación (17) (intervalo xi – a + z2a ≤ x ≤ xi – z1a) o en la ecuación (19) (intervalo xi – z1a ≤ x ≤ xi – cx/2) se obtiene Mj (xj es el punto donde se ubica el momento máximo, y se obtiene derivando las dos ecuaciones e igualándolas a cero).
Sustituyendo x = xi – a + z2a en la ecuación (17) o en la ecuación (15) se obtiene Mk. Sustituyendo x = xi – a + z2a/2 + cx/2 (columna sin frontera) o x = xi – a + cx (columna con frontera) en la ecuación (15) se obtiene Ml. Sustituyendo x = xi – a + z2a/2 – cx/2 (columna sin frontera) o x = xi – a (columna con frontera) en la ecuación (13) se obtiene Mm. Sustituyendo x = xi – cx en la ecuación (21) se obtiene Mn.
Los cortantes por flexión que actúan sobre cada eje se obtienen según sea el caso: Sustituyendo y = ys – cy – d en la ecuación (8) se obtiene Vo. Sustituyendo y = ys – z1b en la ecuación (8) o en la ecuación (6) se obtiene Vb.
Sustituyendo y = ys – b + z3b en la ecuación (6) o en la ecuación (4) se obtiene Vd. Sustituyendo y = ys – b + z3b/2 + cy/2 + d (columna sin frontera) o y = ys – b + cy + d (columna con frontera) en la ecuación (4) se obtiene Vp. Sustituyendo y = ys – b + z3b/2 – cy/2 – d (columna sin frontera) o y = ys – b (columna con frontera) en la ecuación (2) se obtiene Vq. Sustituyendo y = ys – cy – d en la ecuación (10) se obtiene Vr.
Sustituyendo x = xi – cx – d en la ecuación (18) se obtiene Vs. Sustituyendo x = xi – z1a en la ecuación (18) o en la ecuación (16) se obtiene Vi. Sustituyendo x = xi – a + z2a en la ecuación (16) o en la ecuación (14) se obtiene Vk.
Sustituyendo x = xi – a + z2a/2 + cx/2 + d (columna sin frontera) o x = xi – a + cx + d (columna con frontera) en la ecuación (14) se obtiene Vt. Sustituyendo x = xi – a + z2a/2 – cx/2 – d (columna sin frontera) o x = xi – a (columna con frontera) en la ecuación (12) se obtiene Vu. Sustituyendo x = xi – cx – d en la ecuación (20) se obtiene Vv.
Los cortantes por penetración que actúan sobre cada zapata se obtienen según sea el caso: Por la ecuación (22) para la zapata 1. Por la ecuación (23) para la columna no limitada en la dirección X, y por la ecuación (24) para la columna limitada en la dirección X para la zapata 2.
Por la ecuación (25) para la columna no limitada en la dirección Y, y por la ecuación (26) para la columna limitada en la dirección Y para la zapata 3.
La Tabla 2 muestra el peralte efectivo o profundidad efectiva de las zapatas “dz”, el peralte efectivo o profundidad efectiva de las vigas “dv”, los momentos, los cortantes por flexión y los cortantes por penetración que actúan sobre las tres zapatas, y los cortantes por flexión y los cortantes por penetración que resistente el concreto para los cuatro ejemplos.
Tabla 2 Elementos mecánicos de los 4 ejemplos
| Concepto | Ejemplo | |||||||
| 1 | 2 | 3 | 4 | |||||
| Permitidos | Actuantes | Permitidos | Actuantes | Permitidos | Actuantes | Permitidos | Actuantes | |
| dz | 57 | 77 | 72 | 77 | ||||
| dv | 117 | 117 | 117 | 117 | ||||
| MuxT | 128.00 | 312.00 | -56.00 | 128.00 | ||||
| MuyT | 324.00 | 2.00 | 324.00 | -44.00 | ||||
| Ru | 4600.00 | 4600.00 | 4600.00 | 4600.00 | ||||
| Muxa | -2029.16 | -2395.75 | -2015.79 | -2381.65 | ||||
| Muxb | -2401.03 | -2569.97 | -2544.91 | -2697.97 | ||||
| Muxc | -2478.20 | -2655.30 | -2560.54 | -2717.83 | ||||
| yc = ymax | 1.06 | 1.34 | 0.85 | 1.13 | ||||
| Muxd | -357.76 | -377.97 | -1622.61 | -1653.66 | ||||
| Muxe | 303.15 | 295.24 | -10.55 | -11.86 | ||||
| Muxf | 154.38 | 150.90 | 0 | 0 | ||||
| Muxg | 1054.42 | 1436.27 | 1037.53 | 1410.44 | ||||
| Muyh | -1858.93 | -1862.50 | -2126.67 | -2092.70 | ||||
| Muyi | -2431.83 | -2575.72 | -2553.72 | -2665.03 | ||||
| Muyj | -2462.39 | -2591.39 | -2589.64 | -2674.57 | ||||
| xj = xmax | 1.73 | 0.95 | 1.87 | 1.64 | ||||
| Muyk | -351.47 | -2044.41 | -367.64 | -2062.74 | ||||
| Muyl | 475.93 | 2.93 | 470.27 | 2.46 | ||||
| Muym | 253.77 | 0 | 251.06 | 0 | ||||
| Muyn | 638.04 | 634.01 | 896.05 | 886.21 | ||||
| Vuxo | 915.25 | 427.44 | 1118.64 | 104.45 | 1101.06 | 411.04 | 1059.77 | 183.56 |
| Vuxb | 268.38 | -285.34 | 268.38 | -311.36 | 268.38 | -109.31 | 268.38 | -149.16 |
| Vuxd | 268.38 | -657.58 | 268.38 | -693.56 | 268.38 | -404.61 | 268.38 | -454.16 |
| Vuxp | 828.09 | -758.55 | 1118.64 | -682.66 | 1156.11 | -485.88 | 1236.39 | -1016.25 |
| Vuxq | 828.09 | 100.33 | 1118.64 | 0 | 1156.11 | 0 | 1236.39 | 0 |
| Vuxr | 958.84 | 777.83 | 1413.02 | 882.74 | 1211.16 | 671.65 | 1413.02 | 870.57 |
| Vuys | 915.25 | 529.07 | 1118.64 | 502.99 | 1101.06 | 305.95 | 1059.77 | 389.94 |
| Vuyi | 268.38 | -182.91 | 268.38 | 84.96 | 268.38 | -212.06 | 268.38 | 56.15 |
| Vuyk | 268.38 | -626.17 | 268.38 | -288.39 | 268.38 | -653.35 | 268.38 | -316.90 |
| Vuyt | 958.84 | -836.47 | 1413.02 | -1175.86 | 1211.16 | -765.89 | 1413.02 | -1189.22 |
| Vuyu | 958.84 | 207.85 | 1413.02 | 0 | 1211.16 | 111.09 | 1413.02 | 0 |
| Vuyv | 828.09 | 518.48 | 1118.64 | 394.36 | 1156.11 | 611.76 | 1236.39 | 560.93 |
| Vup1 | 1791.28 | 717.84 | 2773.06 | 673.33 | 2510.41 | 688.97 | 2773.06 | 678.41 |
| 3008.85 | 5329.38 | 4687.65 | 5329.38 | |||||
| 1159.06 | 1794.33 | 1624.38 | 1794.33 | |||||
| Vup2 | 3059.56 | 1828.10 | 2773.06 | 1650.63 | 4360.18 | 1780.00 | 2773.06 | 1656.67 |
| 4634.56 | 5329.38 | 7225.00 | 5329.38 | |||||
| 1979.71 | 1794.33 | 2821.29 | 1794.33 | |||||
| Vup3 | 3059.56 | 1523.73 | 4839.60 | 1458.85 | 2510.41 | 1548.97 | 2773.06 | 1456.55 |
| 4634.56 | 8215.41 | 4687.65 | 5329.38 | |||||
| 1979.71 | 3131.51 | 1624.38 | 1794.33 | |||||
La Tabla 2 muestra lo siguiente:
El peralte efectivo o profundidad efectiva mayor de las zapatas se presenta en los ejemplos 2 y 4, y el menor aparece en el ejemplo 1. El peralte efectivo o profundidad efectiva de las vigas son iguales en los cuatro ejemplos.
El momento resultante alrededor del eje X “MuxT” mayor se presenta en el ejemplo 2, y el menor aparece en el ejemplo 3 (valor absoluto). El momento resultante alrededor del eje Y “MuyT” mayor se presenta en los ejemplos 1 y 3, y el menor aparece en el ejemplo 2 (valor absoluto).
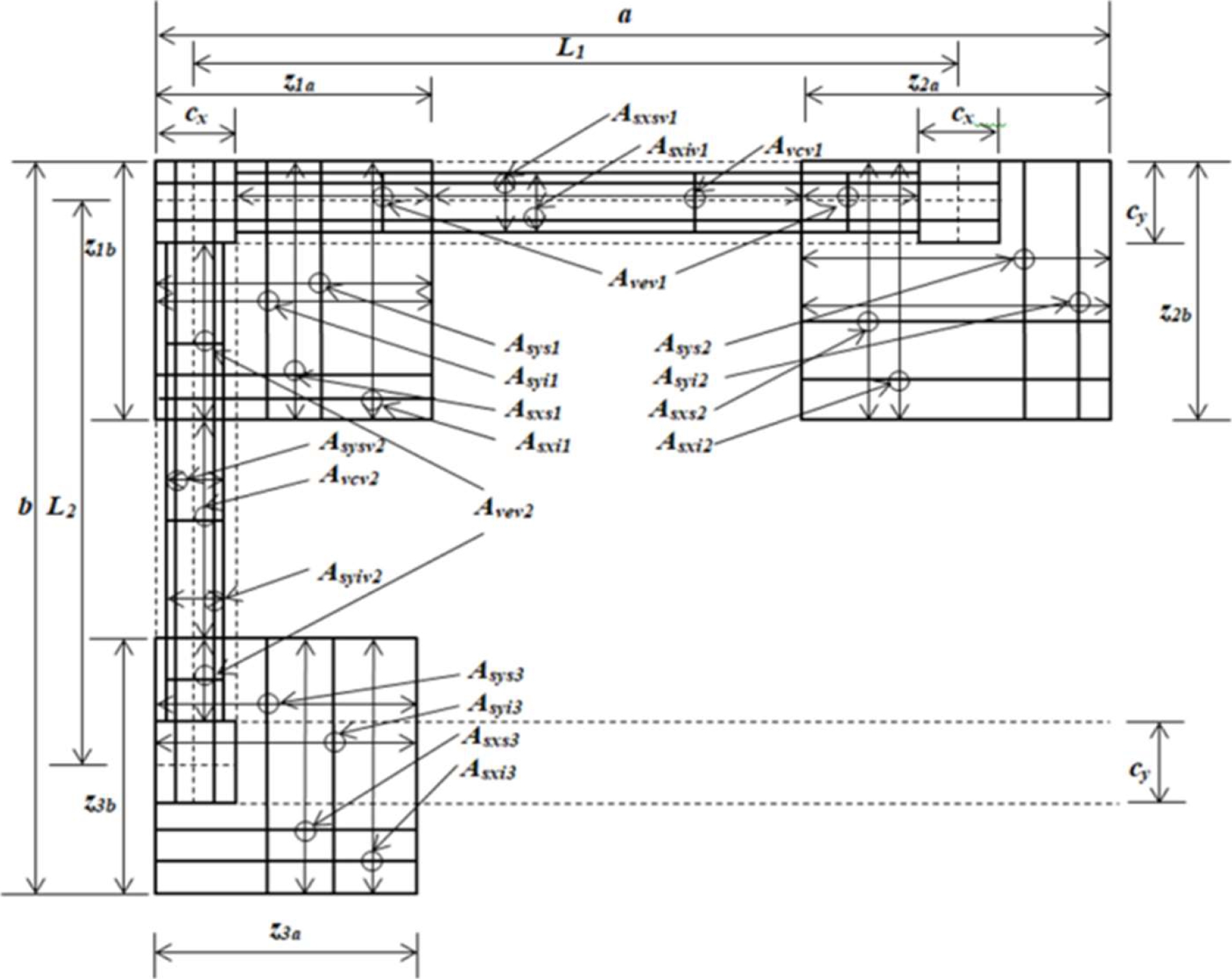
Las áreas de acero de refuerzo sobre las zapatas combinadas de correa en esquina se obtienen como sigue:
Viga 1 (viga que une la zapata 1 y la zapata 2): Acero longitudinal superior principal “Asxsp” se diseña por el momento Muyj. Acero longitudinal inferior principal “Asxip” se diseña con el momento positivo mayor de los momentos Muyi y Muyk, pero en ningún caso debe ser inferior al acero mínimo “Asmin” [25]. Acero transversal se diseña por el cortante Vuyi o Vuyk el que resulte mayor, estos estribos se colocan entre los ejes i y j, y en los extremos de la viga se coloca acero mínimo por cortante “Avmin” [25].
Viga 2 (viga que une la zapata 1 y la zapata 3): Acero longitudinal superior principal “Asysp” se diseña por el momento Muxc. Acero longitudinal inferior principal “Asyip” se diseña con el momento positivo mayor de los momentos Muxb y Muxd, pero en ningún caso debe ser inferior al acero mínimo “Asmin” [25]. Acero transversal se diseña por el cortante Vuxb o Vuxd el que resulte mayor, estos estribos se colocan entre los ejes b y d, y en los extremos de la viga se coloca acero mínimo por cortante “Avmin” [25].
Zapata 1: Acero inferior en la dirección X “Asx” se diseña por los momentos Muyh y Muyi el que resulte mayor. Acero inferior en la dirección Y “Asy” se diseña por los momentos Muxa y Muxb el que resulte mayor. Si los momentos son negativos se consideran en las vigas, y se propone acero mínimo “Asmin” [25].
Zapata 2: Acero inferior en la dirección X “Asx” se diseña por los momentos Muyl y Muym el que resulte mayor. Acero inferior en la dirección Y “Asy” se diseña por el momento Muxg. Si los momentos son negativos se consideran en las vigas, y se propone acero mínimo “Asmin” [25].
Zapata 3: Acero inferior en la dirección X “Asx” se diseña por el momento Muyn. Acero inferior en la dirección Y “Asy” por los momentos Muxe y Muxf el que resulte mayor. Si los momentos son negativos se consideran en las vigas, y se propone acero mínimo “Asmin” [25].
La Tabla 3 muestra las áreas de acero finales para las tres zapatas y las dos vigas para los cuatro ejemplos.
Tabla 3 Áreas de acero de los 4 ejemplos
| Concepto | Ejemplo | |||||||
| 1 | 2 | 3 | 4 | |||||
| Necesario | Propuesto | Necesario | Propuesto | Necesario | Propuesto | Necesario | Propuesto | |
| Viga 1 | ||||||||
| Asxsp | 66.93 | 70.98 (14Ø1”) |
71.40 | 76.05 (15Ø1”) |
71.34 | 76.05 (15Ø1”) |
74.37 | 76.05 (15Ø1”) |
| Asxsmin | 11.70 | 11.70 | 11.70 | 11.70 | ||||
| Asxip | 0 | 15.21 (3Ø1”) | 0 | 15.21 (3Ø1”) | 0 | 15.21 (3Ø1”) | 0 | 15.21 (3Ø1”) |
| Asximin | 11.70 | 11.70 | 11.70 | 11.70 | ||||
| Avc | 1.98 (1Ø5/8”) @ 23.00 cm | 1.98 (1Ø5/8”) @ 58.00 cm | 1.98 (1Ø5/8”) @ 21.00 cm | 1.98 (1Ø5/8”) @ 58.00 cm | ||||
| Ave | 1.98 (1Ø5/8”) @ 58.00 cm | 1.98 (1Ø5/8”) @ 58.00 cm | 1.98 (1Ø5/8”) @ 58.00 cm | 1.98 (1Ø5/8”) @ 58.00 cm | ||||
| Viga 2 | ||||||||
| Asysp | 67.47 | 70.98 (14Ø1”) |
73.68 | 76.05 (15Ø1”) |
70.32 | 70.98 (14Ø1”) |
75.94 | 76.05 (15Ø1”) |
| Asysmin | 11.70 | 11.70 | 11.70 | 11.70 | ||||
| Asyip | 0 | 15.21 (3Ø1”) |
0 | 15.21 (3Ø1”) |
0 | 15.21 (3Ø1”) |
0 | 15.21 (3Ø1”) |
| Asyimin | 11.70 | 11.70 | 11.70 | 11.70 | ||||
| Avc | 1.98 (1Ø5/8”) @ 21.00 cm | 1.98 (1Ø5/8”) @ 19.00 cm | 1.98 (1Ø5/8”) @ 58.00 cm | 1.98 (1Ø5/8”) @ 44.00 cm | ||||
| Ave | 1.98 (1Ø5/8”) @ 58.00 cm | 1.98 (1Ø5/8”) @ 58.00 cm | 1.98 (1Ø5/8”) @ 58.00 cm | 1.98 (1Ø5/8”) @ 58.00 cm | ||||
| Zapata 1 | ||||||||
| Asx | 0 | 40.56 (8Ø1”) |
0 | 50.70 (10Ø1”) |
0 | 50.70 (10Ø1”) |
0 | 50.70 (10Ø1”) |
| Asxmin | 39.90 | 48.77 | 48.00 | 46.20 | ||||
| Asy | 0 | 40.56 (8Ø1”) |
0 | 50.70 (10Ø1”) |
0 | 50.70 (10Ø1”) |
0 | 50.70 (10Ø1”) |
| Asymin | 39.90 | 48.77 | 48.00 | 46.20 | ||||
| Zapata 2 | ||||||||
| Asx | 22.44 | 45.63 (9Ø1”) |
0.10 | 65.91 (13Ø1”) |
17.45 | 55.77 (11Ø1”) |
0.08 | 65.91 (13Ø1”) |
| Asxmin | 41.80 | 61.60 | 52.80 | 61.60 | ||||
| Asy | 50.75 | 55.77 (11Ø1”) |
50.57 | 65.91 (13Ø1”) |
14.23 | 55.77 (11Ø1”) |
49.63 | 65.91 (13Ø1”) |
| Asymin | 41.80 | 61.60 | 52.80 | 61.60 | ||||
| Zapata 3 | ||||||||
| Asx | 30.36 | 40.56 (8Ø1”) |
22.08 | 50.70 (10Ø1”) |
0 | 50.70 (10Ø1”) |
0 | 55.77 (11Ø1”) |
| Asxmin | 36.10 | 48.77 | 50.40 | 53.90 | ||||
| Asy | 14.23 | 40.56 (8Ø1”) |
10.21 | 50.70 (10Ø1”) |
33.58 | 50.70 (10Ø1”) |
30.97 | 55.77 (11Ø1”) |
| Asymin | 36.10 | 48.77 | 50.40 | 53.90 | ||||
4. Resultados
La Tabla 1 muestra lo siguiente:
El momento de inercia sobre el eje X mayor se presenta en el ejemplo 1, y el menor aparece en el ejemplo 4. El momento de inercia sobre el eje Y mayor se presenta en el ejemplo 1, y el menor aparece en el ejemplo 4.
El momento resultante sobre el eje X mayor aparece en el ejemplo 2, y el menor se presenta en el ejemplo 1 (valor absoluto).
El momento resultante sobre el eje Y mayor aparece en el ejemplo 3, y el menor se presenta en el ejemplo 4. La distancia “a” mayor se presenta en los ejemplos 1 y 3, y el menor aparece en los ejemplos 2 y 4.
La distancia “b” mayor aparece en los ejemplos 1 y 2, y el menor se presenta en los ejemplos 3 y 4.
La distancia X del centro de gravedad del lado izquierdo “xi” mayor se presenta en los ejemplos 1 y 3, y el menor aparece en el ejemplo 4.
La distancia X del centro de gravedad del lado derecho “xd” mayor aparece en los ejemplos 1 y 3, y el menor aparece en el ejemplo 2.
La distancia Y del centro de gravedad del lado superior “ys” mayor se presenta en el ejemplo 2, y el menor aparece en el ejemplo 3.
La distancia Y del centro de gravedad del lado inferior “yi” mayor aparece en el ejemplo 1, y el menor aparece en el ejemplo 4.
La dimensión “z1a = z1b” mayor de la zapata 1 se presenta en el ejemplo 1, y la menor aparece en el ejemplo 4. La dimensión “z2a = z2b” mayor de la zapata 2 se presenta en los ejemplos 2 y 4, y la menor aparece en los ejemplos 1 y 3.
La dimensión “z3a = z3b” mayor de la zapata 3 se presenta en los ejemplos 3 y 4, y la menor aparece en los ejemplos 1 y 2.
El esfuerzo máximo y el esfuerzo mínimo se presenta en σmax = σ1 y σmin = σ14 (ejemplo 1), σmax = σ1 y σmin = σ20 (ejemplo 2), σmax = σ19 y σmin = σ4 (ejemplo 3), σmax = σ1 y σmin = σ20 (ejemplo 4). El área mínima “Amin” mayor se presenta en el ejemplo 3, y la menor aparece en el ejemplo 2.
La Tabla 2 muestra lo siguiente:
El peralte efectivo o profundidad efectiva mayor de las zapatas se presenta en los ejemplos 2 y 4, y el menor aparece en el ejemplo 1.
El peralte efectivo o profundidad efectiva de las vigas son iguales en los cuatro ejemplos.
El momento resultante alrededor del eje X “MuxT” mayor se presenta en el ejemplo 2, y el menor aparece en el ejemplo 3 (valor absoluto).
El momento resultante alrededor del eje Y “MuyT” mayor se presenta en los ejemplos 1 y 3, y el menor aparece en el ejemplo 2 (valor absoluto).
El momento máximo sobre el eje X “Muxc” mayor (valor absoluto) se presenta en el ejemplo 4, y el menor aparece en el ejemplo 1 (valor absoluto).
El momento máximo sobre el eje Y “Muyj” mayor (valor absoluto) se presenta en el ejemplo 4, y el menor aparece en el ejemplo 1 (valor absoluto).
Los cortantes por flexión que actúan cumplen para todos los ejemplos con los permitidos por el concreto, con excepción de los cortantes por flexión “Vuxb y Vuxd” (viga 2), y “Vuyi y Vuyj” (viga 1), porque las vigas admiten acero de refuerzo para soportar el cortante excedente por el concreto.
Los cortantes por penetración que actúan cumplen para todos los ejemplos con los permitidos por el concreto, también se observa que el cortante por penetración que rige para el ejemplo 1 es “Vup2”, para el ejemplo 2 es “Vup2”, para el ejemplo 3 es “Vup3”, y para el ejemplo 4 es “Vup2”.
La Tabla 3 muestra lo siguiente:
Viga 1 (viga que une la zapata 1 y la zapata 2): Acero longitudinal superior principal “Asxsp” mayor se presenta en los ejemplos 2, 3 y 4, y el menor aparece en el ejemplo 1. Acero longitudinal inferior principal “Asxip” se presenta el mismo para los cuatro ejemplos y se diseña con el mínimo ya que no hay momentos positivos.Acero transversal en la parte central “Avc” mayor se presenta en el ejemplo 3 (separación mínima), y el menor aparece en los ejemplos 2 y 4 (separación máxima). Acero transversal en los extremos “Ave” se propone acero mínimo “Avmin” [25], porque el cortante por flexión lo soporta el concreto.
Viga 2 (viga que une la zapata 1 y la zapata 3): Acero longitudinal superior principal “Asysp” mayor se presenta en los ejemplos 2 y 4, y el menor aparece en los ejemplos 1 y 3. Acero longitudinal inferior principal “Asyip” se presenta el mismo para los cuatro ejemplos y se diseña con el mínimo ya que no hay momentos positivos. Acero transversal en la parte central “Avc” mayor se presenta en el ejemplo 2 (separación mínima), y el menor aparece en el ejemplo 3 (separación máxima). Acero transversal en los extremos “Ave” se propone acero mínimo “Avmin” [25], porque el cortante por flexión lo soporta el concreto.
Zapata 1: Acero inferior en la dirección X “Asx” mayor se presenta en los ejemplos 2, 3 y 4, y el menor aparece en el ejemplo 1. Para los cuatro ejemplos rige el acero mínimo “Asmin” [25], porque no hay momentos positivos. Acero inferior en la dirección Y “Asy” ocurre lo mismo que en la dirección X. Acero superior en las direcciones X e Y se proporciona acero mínimo “Asmin” [25].
Zapata 2: Acero inferior en la dirección X “Asx” mayor se presenta en los ejemplos 2 y 4, y el menor aparece en el ejemplo 1. Para los cuatro ejemplos rige el acero mínimo “Asmin” [25]. Acero inferior en la dirección Y “Asy” mayor se presenta en los ejemplos 2 y 4, y el menor aparece en los ejemplos 1 y 3. Acero superior en las direcciones X e Y se proporciona acero mínimo “Asmin” [25].
Zapata 3: Acero inferior en la dirección X “Asx” mayor se presenta en el ejemplo 4, y el menor aparece en el ejemplo 1. Para los cuatro ejemplos rige el acero mínimo “Asmin” [25]. Acero inferior en la dirección Y “Asy” mayor se presenta en el ejemplo 4, y el menor aparece en el ejemplo 1. Para los cuatro ejemplos rige el acero mínimo “Asmin” [25]. Acero superior en las direcciones X e Y se proporciona acero mínimo “Asmin” [25].
La Figura 5 muestra en detalle el acero de refuerzo de una manera general para la zapata combinada de correa en esquina.
5. Conclusiones
La cimentación de una construcción o edificación es la parte principal para transmitir las cargas de columna o pared al terreno debajo de la estructura. El modelo propuesto presentado en este trabajo de investigación para el diseño de zapatas combinadas de correa en esquina asume que el suelo de soporte es elástico y las zapatas son perfectamente rígidas, que cumplen con las ecuaciones de la flexión biaxial, es decir, la presión del suelo sobre la zapata varía linealmente.
El modelo propuesto presentado en este trabajo para diseño estructural de zapatas combinadas de correa en esquina bajo una carga concéntrica y dos momentos ortogonales en cada columna, también se puede usar para los otros casos: 1) Zapatas bajo una carga concéntrica en cada columna, es decir, todos los momentos son cero; 2) Zapatas bajo una carga concéntrica y un momento en una dirección en cada columna, es decir, los momentos alrededor del eje X o Y son cero.
Las ventajas de las zapatas combinadas de correa son:
Ayuda a distribuir la carga de manera más uniforme y transfiere el momento a la zapata adyacente.
El empleo de zapatas combinadas de correa puede ser usadas cuando el espacio entre columnas es largo y la zapata combinada regular como la rectangular, trapezoidal o en forma de T no es práctica debido a las excavaciones a gran escala necesarias.
Las principales conclusiones son:
El espesor para las zapatas combinadas de correa en esquina es gobernado por el cortante por penetración, y las zapatas combinadas de esquina se rigen por el cortante por flexión.
El modelo propuesto para obtener el diseño de zapatas combinadas de correa en esquina se puede usar para el diseño de zapatas combinadas de esquina propuesto por Luévanos-Rojas et al. [23].
El modelo propuesto se puede utilizar para obtener el diseño de zapatas combinadas de correa en esquina para dos, tres y cuatro líneas de propiedad de lados restringidos (ver Tablas 1).
El modelo propuesto se apega más a las condiciones reales con respecto al diseño tradicional, porque el modelo propuesto considera la presión lineal del suelo y el diseño tradicional toma en cuenta una presión uniforme y esta es la máxima en toda la superficie.
El modelo propuesto no se limita, mientras que el diseño tradicional toma en cuenta que la fuerza resultante de todas las cargas y momentos aplicados coincide con la posición del centro geométrico de la zapata, es decir, la presión es uniforme (presión máxima) en todos los puntos de contacto.
Por lo tanto, el modelo propuesto en este trabajo de investigación para obtener el diseño de zapatas combinadas de correa en esquina se puede aplicar a zapatas combinadas de esquina, simplemente considerando los anchos en dirección X de las zapatas 1 y 3 iguales, y los anchos en dirección Y de las zapatas 1 y 2 iguales.
Las sugerencias para los siguientes trabajos de investigación pueden ser:
Diseño de unas zapatas combinadas de correa en esquina apoyadas sobre suelos totalmente arcillosos (suelos cohesivos) o suelos totalmente arenosos (suelos granulares), es decir, el diagrama de presión del suelo sobre la zapata es parabólico.
Diseño de una cimentación completa para una edificación usando zapatas combinadas de correa.
Diseño de una cimentación completa para una edificación usando una losa de cimentación.

