











 nova página do texto(beta)
nova página do texto(beta) Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
Permalink1. Introducción
Los cimientos son los elementos estructurales que soportan columnas y muros y transfieren las cargas al suelo subyacente sin exceder la capacidad de carga del suelo por debajo de la estructura. Si las cargas se van a transmitir correctamente, los cimientos deben diseñarse para superar un gran asentamiento o rotación, reducir el asentamiento diferencial y ofrecer la seguridad necesaria contra deslizamientos y vuelcos.
Los tipos de cimentaciones se dividen en:
Las cimentaciones poco profundas o superficiales de concreto reforzado se clasifican en:
1 Zapata individual o zapata aislada.
2 Zapatas combinadas.
3 Zapatas corridas.
4 Zapatas de correa.
5 Losas de cimentación o balsas.
Las cimentaciones profundas se dividen en:
Las zapatas aisladas soportan columnas individuales, y pueden ser cuadradas, circulares o rectangulares en planta.
Las zapatas combinadas soportan dos o más columnas, y pueden ser rectangulares, trapezoidales, en forma de “T” y en forma de “L” (esquinera).
Las zapatas corridas soportan muros.
Las zapatas de correa es un caso especial de zapatas combinadas, es decir, dos zapatas aisladas unidas por una viga de liga.
Las losas de cimentación o balsas soportan todas las columnas del edificio.
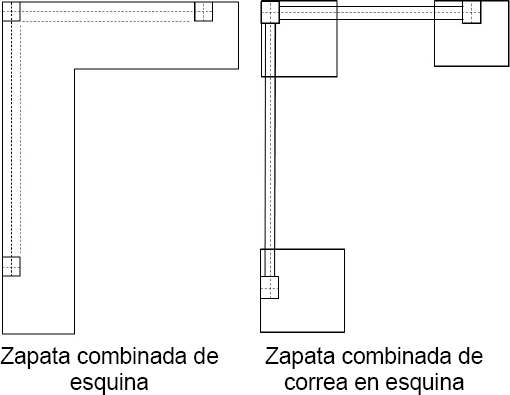
El caso especial para solucionar la cimentación de esquina puede ser una zapata combinada de esquina del tipo L o zapatas aisladas (una de esquina y dos de bode) unidas por vigas de liga como se muestra en la Figura 1.
Los modelos optimizados para zapatas aisladas rectangulares, cuadradas y circulares (cimentaciones poco profundas o superficiales) tomando en cuenta la distribución de la presión del suelo como lineal han utilizado diversos softwares para obtener la solución [1-17].
Los modelos de optimización para zapatas combinadas rectangulares, trapezoidales, en forma de T, de tira o correa y de esquina descansando sobre el terreno utilizan técnicas de optimización para resolver el problema [18-25].
Los artículos más cercanos al tema de optimización para zapatas combinadas de correa en esquina son: López-Chavarría et al. [19] desarrollaron un modelo óptimo para obtener el área mínima de zapatas combinadas de esquina, esta contribución puede ser útil cuando las zapatas tienden a traslaparse una sobre otra, pero cuando las zapatas no se traslapan se deben de usar vigas de correa o de liga (zapatas combinadas de correa en esquina), es decir, las zapatas se unen mediante vigas. Aguilera-Mancilla et al. [24] muestran un modelo matemático para obtener el área mínima de las zapatas combinadas de correa para dos columnas (una columna de frontera y la otra interior), por lo tanto, no se puede usar para obtener la superficie óptima para zapatas combinadas de correa en esquina.
Este trabajo de investigación presenta un modelo óptimo para zapatas combinadas de correa en esquina para obtener el área optimas o superficie mínima en planta de contacto sobre el terreno que soporta una carga concentrada y momentos alrededor de los ejes “X” e “Y” en cada columna.
El modelo propuesto en este trabajo considera que la presión tiene una variación lineal. El modelo tradicional considera una presión uniforme del suelo sobre la zapata de esquina y las dos zapatas de borde y aplicando las tres ecuaciones de equilibrio estático (ΣF, ΣMx y ΣMy) se obtiene la solución para las reacciones de las tres zapatas, la presión se considera uniforme porque la reacción del suelo se aplica en el centro de cada zapata.
Cuatro ejemplos numéricos se muestran para zapatas combinadas de correa en esquina: Ejemplo 1: Lados libres en las direcciones X e Y. Ejemplo 2: Lado restringido en la dirección X y libre en la dirección Y. Ejemplo 3: Lado restringido en la dirección Y y libre en la dirección X. Ejemplo 4: Lado restringido en las direcciones X e Y.
Cada ejemplo presenta tres casos diferentes: Caso 1 toma en cuenta z1a = z1b, z2a = z2b y z3a = z3b, es decir, las zapatas tienen diferentes dimensiones y son cuadradas. Caso 2 considera z1a/My1 = z1b/Mx1, z2a/My2 = z2b/Mx2 y z3a/My3 = z3b/Mx3, es decir, las zapatas están relacionadas con los momentos. Caso 3 considera z1a = z1b, z2a = z2b, z3a = z3b, z1a = z2a y z1a = z3a, es decir, las zapatas tienen las mismas dimensiones y son cuadradas.
2. Formulación matemática del modelo
La ecuación generalizada para las zapatas sometidas a una carga axial y dos momentos ortogonales (flexión biaxial) es:
donde: σ = esfuerzo generado por el suelo en cualquier parte de la zapata (presión del suelo), A = área en planta de la zapata (superficie de contacto sobre el suelo), P = carga concentrada sobre la zapata, Mx = momento alrededor del eje “X”, My = momento alrededor del eje “Y”, x = distancia paralela al eje “X” medida a partir del eje “Y” al punto de análisis, y = distancia paralela al eje “Y” medida a partir del eje “X” al punto de análisis, Iy = momento de inercia sobre el eje “Y” de la cimentación e Ix = momento de inercia sobre el eje “X” de la cimentación.
La Figura 2 muestra una zapata combinada de correa en esquina que soporta tres columnas rectangulares sometidas a una carga axial y dos momentos ortogonales (flexión biaxial) debido a cada columna.

La Figura 3 muestra el diagrama de presiones generadas por el suelo para una zapata combinada de correa en esquina.

Los esfuerzos generados en cada vértice de la zapata combinada de correa en esquina por la ecuación (1) se obtienen:
Aquí R = fuerza resultante, MxT = momento resultante alrededor del eje “X” y MyT = momento resultante alrededor del eje “Y”, estos se obtienen por las ecuaciones siguientes:
Las propiedades geométricas de la zapata combinada de correa en esquina (vista en planta) se obtienen por las ecuaciones siguientes:
Las restricciones para las condiciones de frontera son:
Caso 1: Lados libres en las direcciones X e Y:
Caso 2: Lado restringido en la dirección X y libre en la dirección Y:
Caso 3: Lado libre en la dirección X y restringido en la dirección Y:
Caso 4: Lados restringidos en las direcciones X e Y:
Ahora la función objetivo para la superficie mínima de contacto con el suelo se muestra en la ecuación (25).
Las funciones de restricción para obtener las dimensiones de las zapatas y las vigas de liga en planta se obtienen por las ecuaciones (2) a (24) y (26) a (31), y además las ecuaciones (32) y (33) (caso 1), o las ecuaciones (34) y (35) (caso 2), o las ecuaciones (36) y (37) (caso 3), o las ecuaciones (38) y (39) (caso 4).
Nota: los esfuerzos deben ser menores o iguales a la capacidad de carga admisible disponible del suelo “σad” y mayores o iguales a cero. Este modelo se puede usar para obtener el área mínima para zapatas combinadas de esquina, substituyendo z1b = ca = z2b y z1a = cb = z3a.
3. Aplicación numérica
Cuatro ejemplos numéricos se presentan para obtener la superficie mínima de las zapatas combinadas de correa en esquina (Ejemplo 1: Lados libres en las direcciones X e Y, es decir, cx/2 + L1 + z2a/2 = a y cy/2 + L2 + z3b/2 = b. Ejemplo 2: Lado restringido en la dirección X y libre en la dirección Y, es decir, cx/2 + L1 + cx/2 = a y cy/2 + L2 + z3b/2 = b. Ejemplo 3: Lado libre en la dirección X y restringido en la dirección Y, es decir, cx/2 + L1 + z2a/2 = a y cy/2 + L2 + cy/2 = b. Ejemplo 4: Lados restringidos en las direcciones X e Y, es decir, cx/2 + L1 + cx/2 = a y cy/2 + L2 + cy/2 = b), y para cada ejemplo se presentan tres casos (Caso 1 toma en cuenta z1a = z1b, z2a = z2b y z3a = z3b, es decir, todas las zapatas tienen diferentes dimensiones y son cuadradas cada una. Caso 2 considera z1a/My1 = z1b/Mx1, z2a/My2 = z2b/Mx2 y z3a/My3 = z3b/Mx3, es decir, las zapatas están relacionadas con los momentos. Caso 3 considera z1a = z1b, z2a = z2b, z3a = z3b, z1a = z2a y z1a = z3a, es decir, todas las zapatas tienen las mismas dimensiones y son cuadradas).
Los datos a considerar para la superficie mínima de las zapatas combinadas de correa en esquina son: cx = cy = 0.40 m, ca = cb = 0.30 m, L1 = 8.00 m, L2 = 7.00 m, P1 = 600 kN, P2 = 1400 kN, P3 = 1200 kN, Mx1 = 150 kN-m, Mx2 = 250 kN-m, Mx3 = 200 kN-m, My1 = 200 kN-m, My2 = 350 kN-m, My3 = 300 kN-m son iguales en los cuatro ejemplos y en los tres casos, y en cada caso se presentan cuatro tipos de capacidad de carga admisible disponible del suelo de “σad = 250, 210, 170, 130 kN/m2”. La función objetivo (superficie mínima) se obtiene por la ecuación (25), y las funciones de restricción se obtienen por las ecuaciones (2) a (24) y (26) a (31).
Además las ecuaciones (32) y (33) para el ejemplo 1, o las ecuaciones (34) y (35) para el ejemplo 2, o las ecuaciones (36) y (37) para el ejemplo 3, o las ecuaciones (38) y (39) para el ejemplo 4. Las superficies mínimas para las zapatas combinadas de correa en esquina se obtienen usando el software MAPLE-15, y los resultados para el ejemplo 1 (ver. Tabla 1), para el ejemplo 2 (ver. Tabla 2), para el ejemplo 3 (ver. Tabla 3), y para el ejemplo 4 (ver. Tabla 4).
Tabla 1 Ejemplo 1. Esquina columna 1
| Caso 1 | Caso 2 | Caso 3 | ||||||||||
| σad | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 |
| Ix | 99.95 | 113.17 | 128.47 | 143.33 | 104.05 | 119.32 | 138.08 | 159.29 | 123.39 | 144.77 | 187.32 | 294.51 |
| Iy | 148.81 | 172.65 | 203.05 | 240.26 | 143.85 | 165.23 | 191.57 | 221.74 | 162.64 | 191.19 | 248.25 | 392.08 |
| MxT | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 715.98 | 1067.78 | 1659.46 | 2804.21 |
| MyT | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | -551.45 | -226.15 | 328.25 | 1423.08 |
| a | 9.17 | 9.26 | 9.37 | 9.49 | 9.34 | 9.44 | 9.55 | 9.66 | 9.21 | 9.32 | 9.52 | 9.96 |
| b | 8.07 | 8.13 | 8.21 | 8.26 | 7.92 | 7.98 | 8.05 | 8.12 | 8.21 | 8.32 | 8.52 | 8.96 |
| xi | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.26 | 3.36 | 3.54 | 3.88 |
| xd | 5.74 | 5.83 | 5.94 | 6.06 | 5.91 | 6.01 | 6.12 | 6.23 | 5.95 | 5.96 | 5.98 | 6.08 |
| ys | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.86 | 2.97 | 3.16 | 3.51 |
| yi | 5.43 | 5.49 | 5.57 | 5.62 | 5.28 | 5.34 | 5.41 | 5.48 | 5.35 | 5.35 | 5.36 | 5.45 |
| z1a | 1.72 | 2.11 | 2.63 | 3.40 | 1.99 | 2.44 | 3.03 | 3.93 | 2.02 | 2.24 | 2.65 | 3.53 |
| z1b | 1.72 | 2.11 | 2.63 | 3.40 | 1.49 | 1.83 | 2.28 | 2.94 | 2.02 | 2.24 | 2.65 | 3.53 |
| z2a | 1.95 | 2.13 | 2.34 | 2.58 | 2.28 | 2.48 | 2.70 | 2.92 | 2.02 | 2.24 | 2.65 | 3.53 |
| z2b | 1.95 | 2.13 | 2.34 | 2.58 | 1.63 | 1.77 | 1.93 | 2.09 | 2.02 | 2.24 | 2.65 | 3.53 |
| z3a | 1.73 | 1.87 | 2.01 | 2.13 | 2.15 | 2.34 | 2.55 | 2.77 | 2.02 | 2.24 | 2.65 | 3.53 |
| z3b | 1.73 | 1.87 | 2.01 | 2.13 | 1.43 | 1.56 | 1.70 | 1.84 | 2.02 | 2.24 | 2.65 | 3.53 |
| σ1 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 218.78 | 198.97 | 170 | 130 |
| σ2 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 225.62 | 201.63 | 166.50 | 117.19 |
| σ3 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 243.17 | 207.35 | 160.91 | 106.64 |
| σ4 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 250 | 210 | 157.41 | 93.83 |
| σ5 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 225.33 | 201.26 | 166.05 | 116.72 |
| σ6 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 242.87 | 206.98 | 160.47 | 106.17 |
| σ7 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 223.59 | 199.04 | 163.40 | 113.86 |
| σ8 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 241.13 | 204.77 | 157.81 | 103.31 |
| σ9 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 207.08 | 182.44 | 146.53 | 96.40 |
| σ10 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 207.25 | 182.50 | 146.46 | 96.22 |
| σ11 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 208.26 | 182.86 | 146.06 | 95.13 |
| σ12 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 213.91 | 185.09 | 143.02 | 83.59 |
| σ13 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 231.46 | 190.82 | 137.44 | 73.04 |
| σ14 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 238.30 | 193.47 | 133.93 | 60.23 |
| σ15 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 183.02 | 154.19 | 117.89 | 78.06 |
| σ16 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 184.04 | 154.55 | 117.49 | 76.97 |
| σ17 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 189.69 | 156.79 | 114.45 | 65.44 |
| σ18 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 182.85 | 154.14 | 117.95 | 78.24 |
| σ19 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 171.15 | 137.60 | 94.48 | 44.64 |
| σ20 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 177.99 | 140.25 | 90.98 | 31.83 |
| Amin | 12.80 | 15.24 | 18.82 | 24.62 | 12.80 | 15.24 | 18.82 | 24.62 | 15.01 | 17.68 | 23.30 | 38.81 |
Tabla 2 Ejemplo 2. Esquina columna 1 y 2
| Caso 1 | Caso 2 | Caso 3 | ||||||||||
| σad | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 |
| Ix | 96.82 | 109.63 | 124.81 | 141.15 | 100.74 | 115.69 | 134.59 | 158.31 | 145.50 | 173.24 | 213.65 | 278.70 |
| Iy | 127.30 | 144.77 | 166.53 | 193.64 | 118.60 | 133.35 | 151.31 | 173.30 | 148.30 | 169.47 | 197.36 | 236.13 |
| MxT | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1253.61 | 1652.95 | 2154.10 | 2834.06 |
| MyT | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | -1216.10 | -985.82 | -702.46 | -327.19 |
| a | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 |
| b | 8.05 | 8.12 | 8.19 | 8.26 | 7.91 | 7.97 | 8.04 | 8.12 | 8.34 | 8.47 | 8.66 | 9.92 |
| xi | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.05 | 3.13 | 3.21 | 3.33 |
| xd | 4.97 | 4.97 | 4.97 | 4.97 | 4.97 | 4.97 | 4.97 | 4.97 | 5.35 | 5.27 | 5.19 | 5.07 |
| ys | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 3.03 | 3.15 | 3.31 | 3.52 |
| yi | 5.41 | 5.48 | 5.55 | 5.62 | 5.27 | 5.33 | 5.40 | 5.48 | 5.31 | 5.32 | 5.35 | 5.40 |
| z1a | 1.56 | 1.92 | 2.39 | 3.09 | 1.73 | 2.14 | 2.66 | 3.43 | 2.27 | 2.55 | 2.91 | 3.45 |
| z1b | 1.56 | 1.92 | 2.39 | 3.09 | 1.30 | 1.61 | 2.00 | 2.58 | 2.27 | 2.55 | 2.91 | 3.45 |
| z2a | 2.15 | 2.37 | 2.65 | 2.99 | 2.58 | 2.84 | 3.17 | 3.57 | 2.27 | 2.55 | 2.91 | 3.45 |
| z2b | 2.15 | 2.37 | 2.65 | 2.99 | 1.85 | 2.03 | 2.26 | 2.55 | 2.27 | 2.55 | 2.91 | 3.45 |
| z3a | 1.71 | 1.84 | 1.99 | 2.12 | 2.12 | 2.31 | 2.52 | 2.77 | 2.27 | 2.55 | 2.91 | 3.45 |
| z3b | 1.71 | 1.84 | 1.99 | 2.12 | 1.41 | 1.54 | 1.68 | 1.85 | 2.27 | 2.55 | 2.91 | 3.45 |
| σ1 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 181.12 | 161.14 | 140.10 | 118.36 |
| σ2 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 199.74 | 175.94 | 150.47 | 123.14 |
| σ3 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 231.38 | 195.19 | 159.63 | 125.22 |
| σ4 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 |
| σ5 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 199.31 | 175.47 | 149.97 | 122.63 |
| σ6 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 230.94 | 194.72 | 159.13 | 124.71 |
| σ7 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 196.73 | 172.60 | 146.94 | 119.58 |
| σ8 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 228.36 | 191.85 | 156.10 | 121.66 |
| σ9 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 161.55 | 136.85 | 110.73 | 83.30 |
| σ10 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 161.96 | 137.14 | 110.91 | 83.37 |
| σ11 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 164.42 | 138.89 | 111.98 | 83.79 |
| σ12 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 180.17 | 151.66 | 121.10 | 88.08 |
| σ13 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 211.81 | 170.91 | 130.26 | 90.17 |
| σ14 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 230.43 | 185.71 | 140.63 | 94.94 |
| σ15 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 129.28 | 104.87 | 82.37 | 62.74 |
| σ16 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 131.74 | 106.62 | 83.44 | 63.16 |
| σ17 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 147.49 | 119.39 | 92.56 | 67.45 |
| σ18 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 128.87 | 104.58 | 82.19 | 62.67 |
| σ19 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 109.30 | 80.30 | 52.82 | 27.62 |
| σ20 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 127.92 | 95.10 | 63.19 | 32.39 |
| Amin | 12.80 | 15.24 | 18.82 | 24.62 | 12.80 | 15.24 | 18.82 | 24.62 | 17.77 | 21.44 | 27.08 | 36.72 |
Tabla 3 Ejemplo 3. Esquina columna 1 y 3
| Caso 1 | Caso 2 | Caso 3 | ||||||||||
| σad | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 |
| Ix | 87.49 | 97.71 | 109.62 | 122.55 | 93.97 | 106.33 | 121.39 | 138.98 | 89.75 | 99.50 | 116.63 | 155.00 |
| Iy | 146.39 | 170.24 | 201.33 | 241.67 | 141.45 | 162.62 | 189.12 | 221.03 | 150.15 | 172.15 | 214.63 | 331.08 |
| MxT | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | -245.84 | -47.44 | 270.12 | 901.99 |
| MyT | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | -520.32 | -248.21 | 205.74 | 1184.39 |
| a | 9.17 | 9.26 | 9.37 | 9.50 | 9.33 | 9.43 | 9.54 | 9.67 | 9.17 | 9.26 | 9.42 | 9.80 |
| b | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 |
| xi | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.27 | 3.36 | 3.50 | 3.80 |
| xd | 5.74 | 5.83 | 5.94 | 6.07 | 5.90 | 6.00 | 6.11 | 6.24 | 5.90 | 5.90 | 5.92 | 6.00 |
| ys | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.56 | 2.62 | 2.72 | 2.92 |
| yi | 4.76 | 4.76 | 4.76 | 4.76 | 4.76 | 4.76 | 4.76 | 4.76 | 4.84 | 4.78 | 4.68 | 4.48 |
| z1a | 1.59 | 1.96 | 2.44 | 3.18 | 1.88 | 2.32 | 2.88 | 3.73 | 1.93 | 2.11 | 2.44 | 3.21 |
| z1b | 1.59 | 1.96 | 2.44 | 3.18 | 1.41 | 1.74 | 2.16 | 2.80 | 1.93 | 2.11 | 2.44 | 3.21 |
| z2a | 1.94 | 2.12 | 2.33 | 2.59 | 2.27 | 2.46 | 2.69 | 2.93 | 1.93 | 2.11 | 2.44 | 3.21 |
| z2b | 1.94 | 2.12 | 2.33 | 2.59 | 1.62 | 1.76 | 1.92 | 2.09 | 1.93 | 2.11 | 2.44 | 3.21 |
| z3a | 1.92 | 2.09 | 2.29 | 2.47 | 2.32 | 2.54 | 2.80 | 3.09 | 1.93 | 2.11 | 2.44 | 3.21 |
| z3b | 1.92 | 2.09 | 2.29 | 2.47 | 1.55 | 1.70 | 1.87 | 2.07 | 1.93 | 2.11 | 2.44 | 3.21 |
| σ1 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 212.95 | 195.65 | 170 | 130 |
| σ2 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 219.64 | 198.69 | 167.66 | 118.52 |
| σ3 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 238.02 | 205.95 | 163.31 | 106.40 |
| σ4 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 244.71 | 208.99 | 160.97 | 94.93 |
| σ5 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 219.78 | 198.72 | 167.55 | 118.23 |
| σ6 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 238.16 | 205.97 | 163.19 | 106.11 |
| σ7 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 220.60 | 198.86 | 166.85 | 116.49 |
| σ8 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 238.98 | 206.11 | 162.50 | 104.37 |
| σ9 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 218.24 | 196.65 | 164.35 | 111.33 |
| σ10 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 218.41 | 196.73 | 164.30 | 111.15 |
| σ11 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 219.45 | 197.16 | 164.02 | 110.08 |
| σ12 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 224.93 | 199.70 | 162.02 | 99.85 |
| σ13 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 243.31 | 206.95 | 157.66 | 87.73 |
| σ14 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 250 | 210 | 155.32 | 76.26 |
| σ15 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 228.10 | 198.24 | 158.46 | 105.42 |
| σ16 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 229.14 | 198.67 | 158.17 | 104.36 |
| σ17 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 234.62 | 201.21 | 156.17 | 94.13 |
| σ18 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 227.93 | 198.17 | 158.51 | 105.61 |
| σ19 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 233.22 | 199.17 | 152.86 | 86.94 |
| σ20 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 239.91 | 202.22 | 150.52 | 75.46 |
| Amin | 12.80 | 15.24 | 18.82 | 24.62 | 12.80 | 15.24 | 18.82 | 24.62 | 13.83 | 15.86 | 19.96 | 32.19 |
Tabla 4 Ejemplo 4: Esquina columna 1, 2 y 3
| Caso 1 | Caso 2 | Caso 3 | ||||||||||
| σad | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 |
| Ix | 84.87 | 94.74 | 106.40 | 119.72 | 91.08 | 103.15 | 118.16 | 136.98 | 99.49 | 112.16 | 128.55 | 151.17 |
| Iy | 125.24 | 142.64 | 164.65 | 193.04 | 116.66 | 131.19 | 149.05 | 171.35 | 136.25 | 154.91 | 179.51 | 213.97 |
| MxT | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 110.55 | 350.54 | 737.35 | 1006.79 |
| MyT | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | -1183.27 | -969.59 | -710.34 | -369.97 |
| a | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 | 8.40 |
| b | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 | 7.40 |
| xi | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.43 | 3.06 | 3.13 | 3.21 | 3.32 |
| xd | 4.97 | 4.97 | 4.97 | 4.97 | 4.97 | 4.97 | 4.97 | 4.97 | 5.34 | 5.27 | 5.19 | 5.08 |
| ys | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.64 | 2.67 | 2.75 | 2.84 | 2.95 |
| yi | 4.76 | 4.76 | 4.76 | 4.76 | 4.76 | 4.76 | 4.76 | 4.76 | 4.73 | 4.65 | 4.56 | 4.45 |
| z1a | 1.42 | 1.77 | 2.21 | 2.87 | 1.62 | 2.02 | 2.52 | 3.24 | 2.14 | 2.39 | 2.72 | 3.19 |
| z1b | 1.42 | 1.77 | 2.21 | 2.87 | 1.22 | 1.51 | 1.89 | 2.43 | 2.14 | 2.39 | 2.72 | 3.19 |
| z2a | 2.13 | 2.35 | 2.63 | 3.00 | 2.56 | 2.82 | 3.14 | 3.56 | 2.14 | 2.39 | 2.72 | 3.19 |
| z2b | 2.13 | 2.35 | 2.63 | 3.00 | 1.83 | 2.02 | 2.25 | 2.54 | 2.14 | 2.39 | 2.72 | 3.19 |
| z3a | 1.88 | 2.05 | 2.24 | 2.45 | 2.28 | 2.50 | 2.76 | 3.08 | 2.14 | 2.39 | 2.72 | 3.19 |
| z3b | 1.88 | 2.05 | 2.24 | 2.45 | 1.52 | 1.67 | 1.84 | 2.05 | 2.14 | 2.39 | 2.72 | 3.19 |
| σ1 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 177.05 | 157.42 | 136.76 | 115.48 |
| σ2 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 195.66 | 172.38 | 147.51 | 121.00 |
| σ3 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 231.39 | 195.05 | 159.25 | 124.48 |
| σ4 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 |
| σ5 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 195.60 | 172.22 | 147.27 | 120.67 |
| σ6 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 231.33 | 194.89 | 159.00 | 124.14 |
| σ7 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 195.27 | 171.28 | 145.78 | 118.67 |
| σ8 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 231.00 | 193.95 | 157.51 | 122.15 |
| σ9 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 174.67 | 149.96 | 123.29 | 94.20 |
| σ10 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 175.10 | 150.27 | 123.49 | 94.29 |
| σ11 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 177.71 | 152.15 | 124.67 | 94.81 |
| σ12 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 193.28 | 164.91 | 134.04 | 99.73 |
| σ13 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 229.01 | 187.58 | 145.77 | 103.21 |
| σ14 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 247.62 | 202.53 | 156.53 | 108.73 |
| σ15 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 171.64 | 142.08 | 113.74 | 87.55 |
| σ16 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 174.25 | 143.95 | 114.94 | 88.07 |
| σ17 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 189.82 | 156.72 | 124.30 | 92.99 |
| σ18 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 171.21 | 141.76 | 113.54 | 87.46 |
| σ19 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 168.83 | 135.00 | 100.07 | 66.19 |
| σ20 | 250 | 210 | 170 | 130 | 250 | 210 | 170 | 130 | 187.44 | 149.25 | 110.82 | 71.71 |
| Amin | 12.80 | 15.24 | 18.82 | 24.62 | 12.80 | 15.24 | 18.82 | 24.62 | 15.94 | 19.00 | 23.63 | 31.51 |
4. Resultados
La Tabla 1 muestra lo siguiente (Ejemplo 1):
Caso 1: Cuando σad disminuye, los momentos de inercia Ix e Iy aumentan, los momentos resultantes MxT y MyT son constantes e iguales a cero, las dimensiones a y b aumentan, la posición del centro de gravedad xi e ys son los mismos y xd e yi aumentan, los lados de las zapatas z1a, z1b, z2a, z2b, z3a y z3b aumentan, los esfuerzos en cada vértice de la zapata alcanzan el máximo permitido y es igual a σad, las áreas mínimas aumentan.
Caso 2: Cuando σad disminuye, los momentos de inercia Ix e Iy aumentan, los momentos resultantes MxT y MyT son constantes e iguales a cero, las dimensiones a y b aumentan, la posición del centro de gravedad xi e ys son los mismos y xd e yi aumentan, los lados de las zapatas z1a, z1b, z2a, z2b, z3a y z3b aumentan, los esfuerzos en cada vértice de la zapata alcanzan el máximo permitido y es igual a σad, las áreas mínimas aumentan.
Caso 3: Cuando σad disminuye, los momentos de inercia Ix e Iy aumentan, los momentos resultantes MxT y MyT aumentan, la dimensión a y b aumentan, la posición del centro de gravedad xi, xd, ys e yi aumentan, los lados de las zapatas z1a, z1b, z2a, z2b, z3a y z3b aumentan, el esfuerzo máximo permitido para σad = 250 kN/m2 se alcanzan en σ4 = 250 kN/m2 y el esfuerzo mínimo σ19 = 171.15 kN/m2, el esfuerzo máximo permitido para σad = 210 kN/m2 se alcanzan en σ4 = 210 kN/m2 y el esfuerzo mínimo σ19 = 137.60 kN/m2, el esfuerzo máximo permitido para σad = 170 kN/m2 se alcanzan en σ1 = 170 kN/m2 y el esfuerzo mínimo σ20 = 90.98 kN/m2, el esfuerzo máximo permitido para σad = 130 kN/m2 se alcanzan en σ1 = 130 kN/m2 y el esfuerzo mínimo σ20 = 31.83 kN/m2, las áreas mínimas aumentan.
La Tabla 2 muestra lo siguiente (Ejemplo 2):
Caso 1: Cuando σad disminuye, los momentos de inercia Ix e Iy aumentan, los momentos resultantes MxT y MyT son constantes e iguales a cero, las dimensiones a es constante e igual a 8.40 m y b aumentan, la posición del centro de gravedad xi, xd e ys son los mismos e yi aumentan, los lados de las zapatas z1a, z1b, z2a, z2b, z3a y z3b aumentan, los esfuerzos en cada vértice de la zapata alcanzan el máximo permitido y es igual a σad, las áreas mínimas aumentan.
Caso 2: Cuando σad disminuye, los momentos de inercia Ix e Iy aumentan, los momentos resultantes MxT y MyT son constantes e iguales a cero, las dimensiones a es constante e igual a 8.40 m y b aumentan, la posición del centro de gravedad xi, xd e ys son los mismos e yi aumentan, los lados de las zapatas z1a, z1b, z2a, z2b, z3a y z3b aumentan, los esfuerzos en cada vértice de la zapata alcanzan el máximo permitido y es igual a σad, las áreas mínimas aumentan.
Caso 3: Cuando σad disminuye, los momentos de inercia Ix e Iy aumentan, los momentos resultantes MxT y MyT aumentan, la dimensión a es constante e igual a 8.40 m y b aumentan, la posición del centro de gravedad xi, ys e yi aumentan y xd disminuye, los lados de las zapatas z1a, z1b, z2a, z2b, z3a y z3b aumentan, el esfuerzo máximo permitido para σad = 250 kN/m2 se alcanzan en σ4 = 250 kN/m2 y el esfuerzo mínimo σ19 = 109.30 kN/m2, el esfuerzo máximo permitido para σad = 210 kN/m2 se alcanzan en σ4 = 210 kN/m2 y el esfuerzo mínimo σ19 = 80.30 kN/m2, el esfuerzo máximo permitido para σad = 170 kN/m2 se alcanzan en σ4 = 170 kN/m2 y el esfuerzo mínimo σ19 = 52.82 kN/m2, el esfuerzo máximo permitido para σad = 130 kN/m2 se alcanzan en σ4 = 130 kN/m2 y el esfuerzo mínimo σ19 = 27.62 kN/m2, las áreas mínimas aumentan.
La Tabla 3 muestra lo siguiente (Ejemplo 3):
Caso 1: Cuando σad disminuye, los momentos de inercia Ix e Iy aumentan, los momentos resultantes MxT y MyT son constantes e iguales a cero, las dimensiones a aumentan y b es constante e igual a 7.40 m, la posición del centro de gravedad xi, ys e yi son los mismos y xd aumentan, los lados de las zapatas z1a, z1b, z2a, z2b, z3a y z3b aumentan, los esfuerzos en cada vértice de la zapata alcanzan el máximo permitido y es igual a σad, las áreas mínimas aumentan.
Caso 2: Cuando σad disminuye, los momentos de inercia Ix e Iy aumentan, los momentos resultantes MxT y MyT son constantes e iguales a cero, las dimensiones a aumentan y b es constante e igual a 7.40 m, la posición del centro de gravedad xi, ys e yi son los mismos y xd aumentan, los lados de las zapatas z1a, z1b, z2a, z2b, z3a y z3b aumentan, los esfuerzos en cada vértice de la zapata alcanzan el máximo permitido y es igual a σad, las áreas mínimas aumentan.
Caso 3: Cuando σad disminuye, los momentos de inercia Ix e Iy aumentan, los momentos resultantes MxT y MyT aumentan, las dimensiones a aumentan y b es constante e igual a 7.40 m, la posición del centro de gravedad xi, xd e ys aumentan e yi disminuye, los lados de las zapatas z1a, z1b, z2a, z2b, z3a y z3b aumentan, el esfuerzo máximo permitido para σad = 250 kN/m2 se alcanzan en σ14 = 250 kN/m2 y el esfuerzo mínimo σ1 = 212.95 kN/m2, el esfuerzo máximo permitido para σad = 210 kN/m2 se alcanzan en σ14 = 210 kN/m2 y el esfuerzo mínimo σ1 = 195.65 kN/m2, el esfuerzo máximo permitido para σad = 170 kN/m2 se alcanzan en σ1 = 170 kN/m2 y el esfuerzo mínimo σ20 = 150.52 kN/m2, el esfuerzo máximo permitido para σad = 130 kN/m2 se alcanzan en σ1 = 130 kN/m2 y el esfuerzo mínimo σ20 = 75.46 kN/m2, las áreas mínimas aumentan.
La Tabla 4 muestra lo siguiente (Ejemplo 4):
Caso 1: Cuando σad disminuye, los momentos de inercia Ix e Iy aumentan, los momentos resultantes MxT y MyT son constantes e iguales a cero, las dimensiones a es constante e igual a 8.40 m y b es constante e igual a 7.40 m, la posición del centro de gravedad xi, xd, ys e yi son los mismos, los lados de las zapatas z1a, z1b, z2a, z2b, z3a y z3b aumentan, los esfuerzos en cada vértice de la zapata alcanzan el máximo permitido y es igual a σad, las áreas mínimas aumentan.
Caso 2: Cuando σad disminuye, los momentos de inercia Ix e Iy aumentan, los momentos resultantes MxT y MyT son constantes e iguales a cero, las dimensiones a es constante e igual a 8.40 m y b es constante e igual a 7.40 m, la posición del centro de gravedad xi, xd, ys e yi son los mismos, los lados de las zapatas z1a, z1b, z2a, z2b, z3a y z3b aumentan, los esfuerzos en cada vértice de la zapata alcanzan el máximo permitido y es igual a σad, las áreas mínimas aumentan.
Caso 3: Cuando σad disminuye, los momentos de inercia Ix e Iy aumentan, los momentos resultantes MxT y MyT aumentan, las dimensiones a es constante e igual a 8.40 m y b es constante e igual a 7.40 m, la posición del centro de gravedad xi, e ys aumentan y xd e yi disminuye, los lados de las zapatas z1a, z1b, z2a, z2b, z3a y z3b aumentan, el esfuerzo máximo permitido para σad = 250 kN/m2 se alcanzan en σ4 = 250 kN/m2 y el esfuerzo mínimo σ19 = 168.83 kN/m2, el esfuerzo máximo permitido para σad = 210 kN/m2 se alcanzan en σ4 = 210 kN/m2 y el esfuerzo mínimo σ19 = 135.00 kN/m2, el esfuerzo máximo permitido para σad = 170 kN/m2 se alcanzan en σ4 = 170 kN/m2 y el esfuerzo mínimo σ19 = 100.07 kN/m2, el esfuerzo máximo permitido para σad = 130 kN/m2 se alcanzan en σ4 = 130 kN/m2 y el esfuerzo mínimo σ19 = 66.19 kN/m2, las áreas mínimas aumentan.
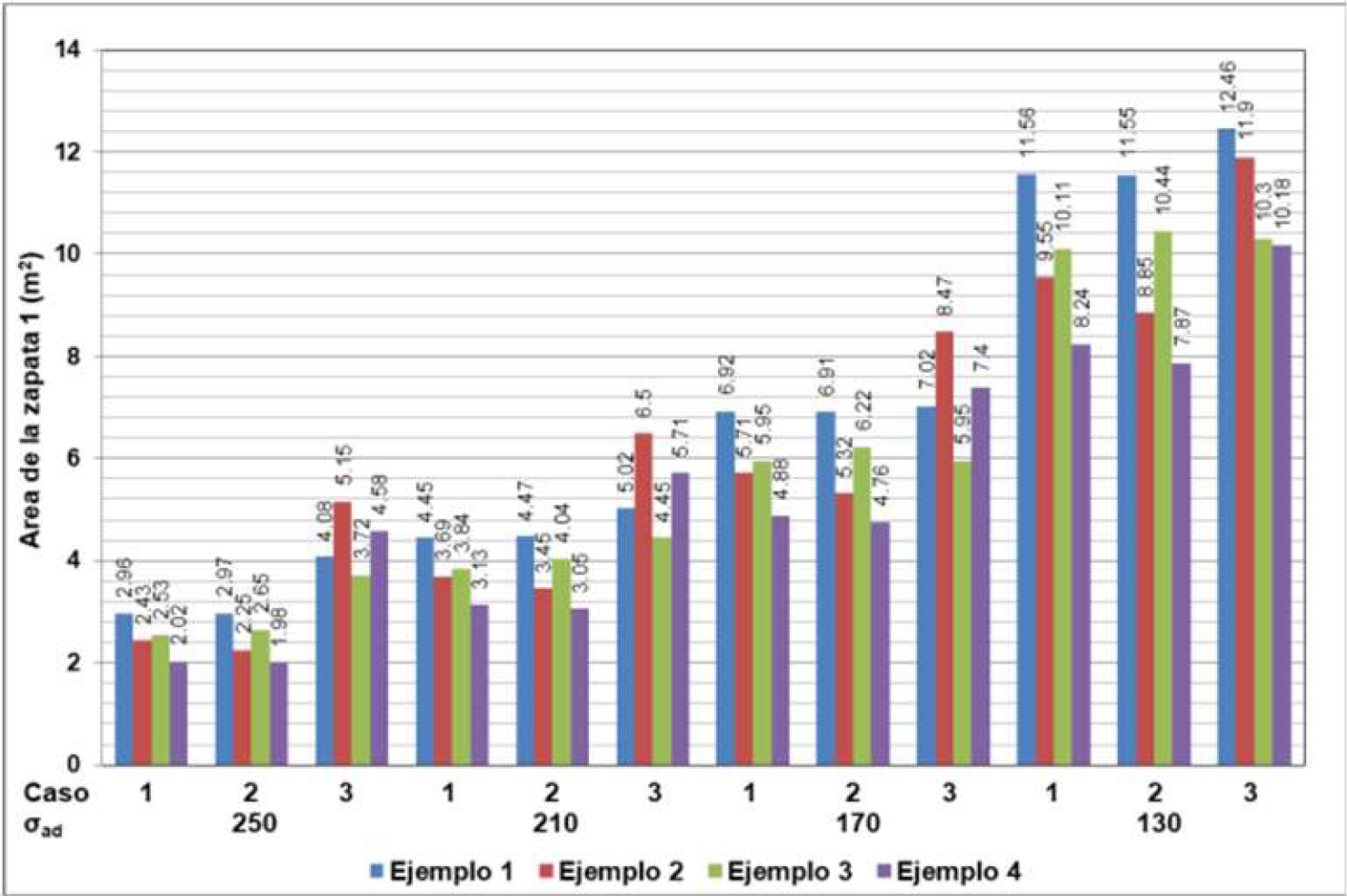
La Figura 4 muestra el área de la zapata 1 para cada ejemplo y en cada caso para cada capacidad de carga admisible disponible del suelo. El área menor se presenta en el ejemplo 4, caso 1 y σad = 250 kN/m2. El área mayor se presenta en el ejemplo 1, caso 3 y σad = 130 kN/m2.
La Figura 5 muestra el área de la zapata 2 para cada ejemplo y en cada caso para cada capacidad de carga admisible disponible del suelo. El área menor se presenta en el ejemplo 3, caso 2 y σad = 250 kN/m2. El área mayor se presenta en el ejemplo 1, caso 3 y σad = 130 kN/m2.

La Figura 6 muestra el área de la zapata 3 para cada ejemplo y en cada caso para cada capacidad de carga admisible disponible del suelo. El área menor se presenta en el ejemplo 2, caso 2 y σad = 250 kN/m2. El área mayor se presenta en el ejemplo 1, caso 3 y σad = 130 kN/m2.

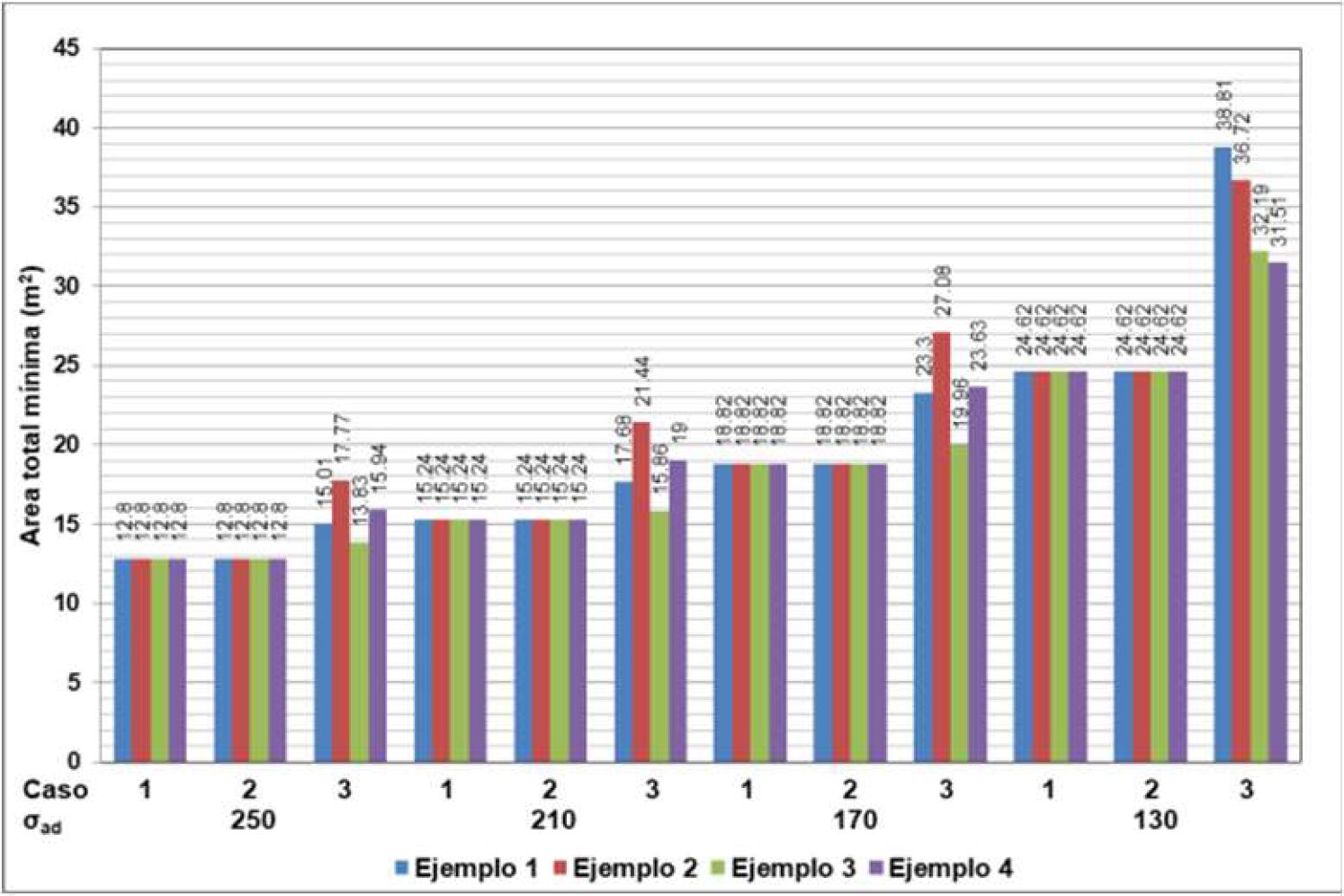
La Figura 7 muestra el área total mínima de toda la cimentación para cada ejemplo y en cada caso para cada capacidad de carga admisible disponible del suelo. El área menor se presenta en los ejemplos 1, 2, 3 y 4, casos 1 y 2 y σad = 250 kN/m2. El área mayor se presenta en el ejemplo 1, caso 3 y σad = 130 kN/m2. También se observa claramente que en los cuatro ejemplos para los casos 1 y 2, para cada capacidad de carga admisible disponible del suelo son los mismos.
5. Conclusiones
La cimentación de una construcción o edificación es la parte principal para transmitir las cargas de columna o muros al terreno debajo de la estructura. El nuevo modelo presentado en este artículo produce resultados que tienen una precisión sin precedentes para todos los problemas de ingeniería de cimentaciones. La parte principal de esta investigación es obtener la superficie mínima para las zapatas combinadas de correa en esquina apoyados sobre el terreno utilizando las técnicas de optimización.
Este estudio asume que el suelo de soporte es elástico y las zapatas son perfectamente rígidas, que cumplen con las ecuaciones de la flexión biaxial, es decir, la presión del suelo sobre la zapata varia linealmente.
El modelo propuesto presentado en este trabajo para encontrar la superficie mínima en planta para las zapatas combinadas de correa en esquina bajo una carga concéntrica y dos momentos ortogonales en cada columna, también se puede usar para los otros casos: 1) Zapatas bajo una carga concéntrica en cada columna, es decir, todos los momentos son cero; 2) Zapatas bajo una carga concéntrica y un momento en una dirección en cada columna, es decir, los momentos alrededor del eje X o Y son cero.
Las principales conclusiones son:
1 La metodología presentada en este trabajo de investigación es más precisa que cualquier otra metodología.
2 El modelo propuesto para obtener la superficie mínima en planta para zapatas combinadas de correa en esquina se puede usar para el modelo de zapatas combinadas de esquina propuesto por López-Chavarría et al. [11].
3 El modelo propuesto se puede utilizar para encontrar la superficie mínima en planta de zapatas combinadas de correa en esquina para dos, tres y cuatro líneas de propiedad de lados restringidos (ver Tablas 1 a 4).
4 Cuando los momentos resultantes de “MxT” y “MyT” son iguales a cero, esto significa que la fuerza resultante de todas las cargas y momentos se ubica en el centro de gravedad de la zapata, es decir, los esfuerzos generados por el suelo son los mismos e igual a la capacidad de carga admisible disponible del suelo (ver Tablas 1 a 4, casos 1 y 2).
5 El modelo propuesto es congruente con los resultados obtenidos sobre los esfuerzos generados por el suelo, porque cuando se presenta el esfuerzo máximo en un punto, y en el punto opuesto se presenta el esfuerzo mínimo, es decir, σmax = σ4 y σmin = σ19, σmax = σ1 y σmin = σ20 (ejemplo 1, caso 3), σmax = σ4 y σmin = σ19 (ejemplo 2, caso 3), σmax = σ14 y σmin = σ1, σmax = σ1 y σmin = σ20 (ejemplo 3, caso 3), σmax = σ4 y σmin = σ19 (ejemplo 4, caso 3).
Por lo tanto, el modelo propuesto en este trabajo de investigación para obtener la superficie mínima de las zapatas combinadas de correa en esquina se puede aplicar a zapatas combinadas de esquina, simplemente considerando los anchos en dirección X de las zapatas 1 y 3 iguales, y los anchos en dirección Y de las zapatas 1 y 2 iguales.
Las sugerencias para los siguientes trabajos de investigación pueden ser:
1 Superficie mínima de zapatas combinadas de correa en esquina apoyadas sobre suelos totalmente arcillosos (suelos cohesivos) o suelos totalmente arenosos (suelos granulares), es decir, el diagrama de presión del suelo sobre la zapata es parabólico.
2 Superficie mínima de cimentaciones completas para una edificación usando zapatas combinadas de correa.
3 Superficie mínima de cimentaciones completas para una edificación usando una losa de cimentación.

