











 text new page (beta)
text new page (beta) English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1 Introduction
‘Distributed knowledge’ is one of the notions of group knowledge studied in multi-agent epistemic logic [6, 18]. A typical example of distributed knowledge is the following: a group consisting of
Formally, distributed knowledge is expressed as a modal operator
Not to mention distributed knowledge, epistemic logic as a whole has been studied mainly in the classical setting. However, several kinds of intuitionistic epistemic logics have been proposed from different perspectives. Several philosophical logicians have proposed intuitionistic epistemic logics [31, 24, 3] for the sake of analysis of Fitch’s knowability paradox [7], from the verificationist point of view.
Another kind of intuitionistic epistemic logic [14] is proposed for the analysis of distributed computing in the sense of [13, 26]. Also, [27] develops an intuitionistic epistemic logic from the game-theoretical point of view. The intuitionistic aspect of the logic is required for describing the property of asynchronous communication among agents in distributed computing.
Jäger and Marti [15] formulate intuitionistic epistemic logic with distributed knowledge for the first time, as far as the authors know, and prove semantic completeness of Hilbert systems of intuitionistic
However, our axiom
The paper is organized as follows. In Section 2, we introduce syntax and semantics for intuitionistic epistemic logic with distributed knowledge. Section 3 defines Hilbert systems of the logics, and state soundness results. In Section 4, strong completeness of the Hilbert systems of the logics is shown, via a notion of “pseudo-model”.
In Section 5, we introduce sequent calculi for the logics and prove the cut-elimination theorem, Craig interpolation theorem, and decidability.
2 Syntax and Semantics of Intuitionistic Epistemic Logics with Distributed Knowledge Operators
We denote a finite set of agents by 
We read
We introduce Kripke semantics for intuitionistic multi-agent epistemic logic with distributed knowledge, along the lines of [15].
Definition 2.1 (Frame, Model). A tuple
A pair
For a model
Satisfaction relation
| iff | ||
| iff | ||
| iff | ||
| iff | ||
| iff | ||
It is noted from our definition of
As is the case with ordinary intuitionistic logic, we have the following heredity property for a formula.
Proposition 2.2 (Heredity). If
Proof. By induction on
Fig. 1 is an example of a frame. The preorder is depicted by a dotted arrow. Note that we omit reflexive arrows for the preorder. If a valuation is defined by, for example,

Table 1 Axioms and Rules for Hilbert-style Axiomatizations
| Axioms and Rules for Intuitionistic Logic | ||||
| From |
||||
| Axioms and Rules for | ||||
| From |
||||
| Additional Axioms for | ||||
Definition 2.3. A formula
3 Hilbert Systems
Hilbert systems for intuitionistic epistemic logics with
A Hilbert system
Definition 3.1. A formula
We introduce a class of frames corresponding to each logic, in order to state soundness of our axiomatization.
Definition 3.2. A class of frames
—
—
—
—
—
—
Here, reflexivity, seriality, and transitivity are defined ordinarily.
We can prove the following soundness theorem by induction on
Theorem 3.3. If
4 Completeness
In the present section, we explain a proof of the strong completeness theorem of our logic. Let
Theorem 4.1. Let
As in [5], we show the theorem in two steps via the notion of “pseudo-model”, that is, we first construct a canonical pseudo-model satisfying truth lemma, and then transform it into an equivalent pseudo-model which can be regarded as a model in the sense of Definition 2.1.
Definition 4.2 (Pseudo-frame, Pseudo-model). A tuple
A pair
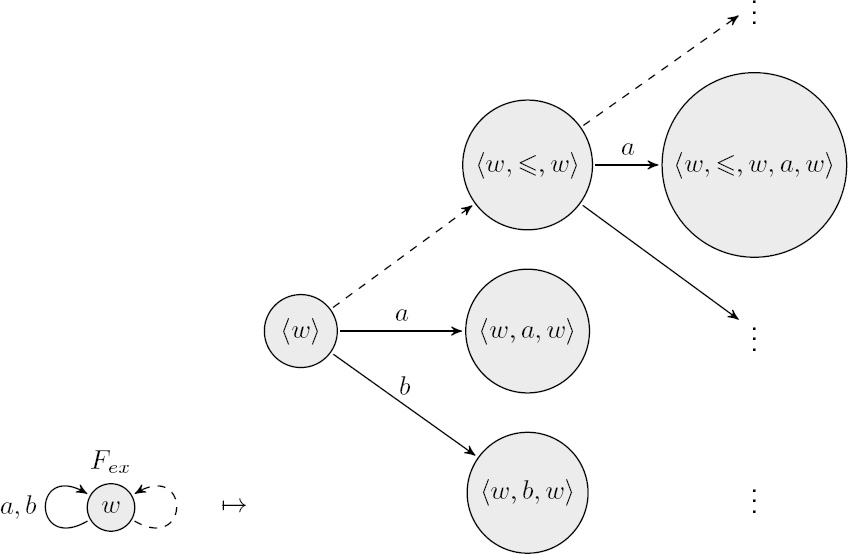
Example 4.3. Fig. 2 is an example of a pseudo-frame. We name it
Definition 4.4 (Pseudo-satisfaction Relation). For a pseudo-model
Namely, in a pseudo-model, an operator
Considering the definition of satisfaction relation for
So, we can prove the strong completeness theorem by transforming a canonical pseudo-model into a pseudo-model enjoying the condition above without changing satisfaction. We do this by a method of “tree unraveling”.
4.1 Canonical Pseudo-Model
We define a canonical pseudo-model of our logics and state some properties of it in the present subsection. Since
Definition 4.5 (consistency). A set
Definition 4.6 (prime theory).
The following are useful properties of a consistent and prime theory.
Lemma 4.7. Let a set
1.
2. If
3.
4.
5.
6. If
7. If
Lemma 4.8 (Lindenbaum). Let
Definition 4.9. Given a set
is defined as follows:
—
—
—
—
The definition is well-defined:
Proposition 4.10.
Lemma 4.11 (Truth Lemma). Let
Proof. By induction on
For each axiom, the canonical pseudo-model satisfies the corresponding property on relations for
Proposition 4.12. 1. If
2. If
3. If
Proof. We only show item 2. Fix any
4.2 Tree Unraveling
We introduce a method called “tree unraveling”, which transforms a pseudo-model into another pseudo-model satisfying
Definition 4.13. Let
For
that
Definition 4.14. Let
— We put
— For
— We say that paths
— We say that paths
— A valuation
Take
Definition 4.15 (Tree Unraveling). Let
where
We can easily show that
Lemma 4.16. Let
Proof. The function
We end the present section by proving Theorem 4.1.
Proof. (Outline) First, we show the case of
For the remaining logics, basically, a similar argument can be applied, but definitions and proofs become more involved. In order to make relations for
Here,
5 Sequent Calculi of Intuitionistic Epistemic Logics with Distributed Knowledge
5.1 Equipollence and Cut-Elimination
A sequent is a pair of finite multisets of formulas
Table 2 Sequent Calculi for
| Axioms |
| Structural Rules |
| Propositional Logical Rules |
| Logical Rules for |
|
Logical Rules for |
|
Logical Rules for |
|
Logical Rules for |
|
Logical Rules for |
| Logical Rules for |
We note that when
Example 5.1. The following is an application of rule
We note that for any logic
Theorem 5.2 (Equipollence). Let
Proof. We show the case of
We show
We have the cut-elimination theorem for all of the logics in consideration.
Theorem 5.3 (Cut-Elimination). Let
Proof. First, we introduce a notion of “principal formula”. A principal formula is defined for each inference rule, except for the axioms and
Definition 5.4. A principal formula of the structural rules, the propositional logical rules, and the rule
To prove the theorem, we consider a system
where
Suppose
where the derivations
We concentrate on a rule
where
and
The derivation
where the rule
The following subformula property is an important corollary of the cut-elimination theorem, and later used in a proof of decidability.
Corollary 5.5 (Subformula Property). Let
Proof. A cut-free derivation of
5.2 Craig Interpolation Theorem and Decidability
In many logics, the Craig interpolation theorem can be derived as an application of the cut-elimination theorem, using a Maehara method originally described in [16]. An application of the method to basic modal logic can also be found in [21]. Unlike [19], the concept of ‘partition’ is simplified, because we do not allow multiple formulas to appear in the succedent of a sequent.
Definition 5.6 (Partition). A partition for a sequent
Definition 5.7. For a formula
The following is a key lemma for Craig Interpolation Theorem.
Lemma 5.8. Let
Proof. We prove the case of
A partition of
The induction hypothesis on
Furthermore, the interpolant enjoys the condition 2 and 3 as induction hypothesis and simple calculation show. If
Theorem 5.9 (Craig Interpolation Theorem). Let
We note that not only the condition for propositional variables but also the condition for agents can be satisfied.
Proof. When we set
Further, decidability of the logics we investigate also follows from the cut-elimination theorem (Theorem 5.3). To show decidability, we introduce a notion of “(1-)reduced sequent”.
Definition 5.10. A sequent
Definition 5.11. For any sequent
Proposition 5.12.
Proof. By definition of the 1-reduced contraction, the left-to-right is obvious. The right-to-left is also easily shown by applying
Lemma 5.13. Suppose that
Proof. Thanks to Theorem 5.3, we can take a cut-free derivation of
By induction hypothesis, we have a derivation
Remark 5.14. We admit three occurrences of the same formula in a reduced sequent, because if we only allow at most two occurrences, induction fails in the case of
Theorem 5.15 (Decidability). Let
Proof. We describe a rough sketch of the proof, based on [21, p. 228]. By Proposition 5.12, it suffices to check whether
6 Concluding Remark
We conclude this paper with four possible directions for further research. The first direction is to simplify our semantic completeness argument via a similar method given in [30] for classical epistemic logic with distributed knowledge. One of the merits of the method is that the notion of pseudo- (or pre-) model is not necessary. The second direction is to add

