











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1. Introducción
El volumen es uno de los temas importantes en la producción y procesamiento de productos alimenticios. El volumen junto con otras propiedades físicas desempeña un papel importante en el cálculo de la pérdida del agua, la trasferencia de calor, la cantidad de aplicaciones de plaguicidas, las tasas de respiración, etc. Para los sistemas de procesamiento de alimentos, las técnicas rápidas y no destructivas para la medición de volumen es útil para clasificar el tamaño, calidad y concentración microbiana [1]. Si se puede determinar el volumen de un producto alimenticio, entonces se pueden estimar fácilmente las otras propiedades físicas, como la masa y la densidad [2, 3].
En frutas y vegetales, el tamaño, la masa, el volumen y los atributos de densidad están algo correlacionados. El volumen y la masa, juntos determinan la densidad de la fruta relacionada con la consistencia y sabor del producto. El volumen también puede usarse para la predicción del tiempo de cosecha [4].
Por ejemplo, el volumen utilizado como característica de clasificación de frutas y hortalizas muestra un coeficiente de correlación de 0.91 con la longitud en la clasificación de chile jalapeño [5]. Las diferencias de densidad también se han utilizado para la inspección de calidad, tales como la prueba de viabilidad de semillas y la prueba de granulación de cítricos. Se han aplicado diferentes modelos matemáticos y métodos de análisis numérico para extraer una representación de volumen.
Algunos métodos comúnmente usados para determinar el volumen incluyen el diámetro medio geométrico, el método de desplazamiento de agua y el método de desplazamiento de gas.
En los últimos años, la visión por computadora se ha encontrado cada vez más útil en la industria agrícola y alimentaria, especialmente para aplicaciones en la inspección de calidad, cumpliendo con los estándares de calidad y aumentando el valor de mercado.
De hecho, la visión por computadora es la herramienta más eficaz para medir características externas tales como intensidad de color, homogeneidad de color, moretones, tamaño, forma e identificación de vástago.
El uso de la visión artificial también está ganando interés por la determinación de atributos físicos de frutas y objetos de forma irregular, porque es un método no destructivo que requiere análisis de imágenes y procedimientos de procesamiento de imágenes.
En el trabajo [6] desarrollaron una combinación de visión por computadora y redes neuronales para la estimación del volumen del fruto de pera a partir de las imágenes digitales 2D. En [4] desarrollaron un algoritmo de imagen para medir el volumen de productos agrícolas de forma no circular, como las zanahorias. Una técnica de procesamiento de imágenes para calcular el volumen y la superficie de los productos agrícolas axi-simétricos fueron utilizados en [7, 8]. En [9, 10] desarrollaron un sistema de imagen para estimar el volumen de productos agrícolas de forma irregular usando proyecciones radiales.
En [11] se determinó el volumen de la sandía usando aproximación elipsoide y procesamiento de imágenes. Recientemente se han estudiado clasificadores artificiales generados por computadora que pretenden imitar la toma de decisiones humanas para la clasificación y la calidad del producto.
La clasificación en línea del color de lentejas utilizando un escáner de superficie plana con clasificador neuronal desarrollado por [12] logró una precisión general de más del 90%. En el trabajo [13] desarrollaron un sistema de clasificación de frutas en línea basado en características de calidad externa de dos variedades de manzanas, Golden Delicious y Jonagold, utilizando análisis discriminante cuadrático y redes neuronales.
La clasificación de la imagen se realizó en seis pasos: adquisición de imágenes; clasificación del color del suelo; segmentación de defectos; reconocimiento del cáliz y del tallo; caracterización de defectos; y finalmente la clasificación de las frutas en clases de calidad. Ambos algoritmos dieron resultados similares (79% y 72%) para ambas variedades estudiadas. En [14] combinaron técnicas de visión artificial con análisis discriminante Bayesiano para la estimación en línea de la calidad de las naranjas, melocotones y manzanas y evaluaron la eficiencia de estas técnicas con respecto a los siguientes atributos de calidad: tamaño, color, ubicación del tallo y detección de manchas externas.
El objetivo de esta investigación fue proponer una metodología para la medición de parámetro de forma del fruto de tomate utilizando técnica de reconstrucción 3D.
Esta metodología se basa la técnica de vistas múltiples, que permite obtener un modelo tridimensional del tomate.
El caso de estudio podría ser generalizado a otros productos que requieran ser caracterizados morfológicamente. La forma del fruto de tomate fue evaluada respecto a los siguientes factores de forma: elongación, planicidad, razón de aspecto y esfericidad.
2. Materiales y métodos
2.1. Adquisición de datos
El volumen real de los frutos se puede medir por el método de desplazamiento de agua (MDA). El MDA es uno de los métodos más comunes y simples para medir el volumen de objetos grandes como: frutas y vegetables [18]. El procedimiento es como sigue: primero, el fruto es pesado en una balanza y enseguida se sumerge en agua con una barra de plomo. El peso del agua desplazada se calcula restando el peso del contenedor lleno de agua del peso del contenedor cuando contiene la fruta. El valor resultante se usa para calcular el volumen de la fruta usando [18]:
Aunque el método MDA es bastante preciso, no es ideal para objetos que absorben agua y para algunos productos, este enfoque puede considerarse intrusivo o destructivo. El volumen de las frutas también se puede calcular numéricamente mediante procesamiento de imágenes.
La metodología implementada en este trabajo implica la determinación del volumen 3D del fruto del tomate mediante la técnica de vistas múltiples. La metodología incluye, la adquisición de los datos, segmentación de la imagen, generación de nube de puntos y la determinación del volumen 3D. En la figura 1 presenta la metodología utilizada en este trabajo.

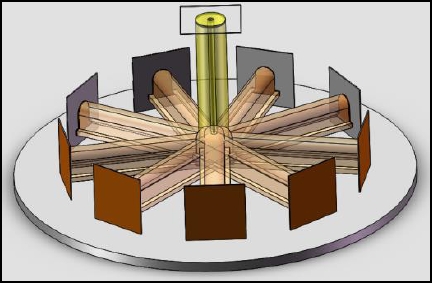
En la figura 2, se presenta el sistema implementado el cual consiste en un dispositivo que permite rotar el fruto de tomate de 0° a 360°. La cámara (marca PHILIPS PCVC830K/30 con tamaño de imagen de 352x288 pixeles) es posicionada frente al soporte donde se coloca el fruto.

El software desarrollado permite sincronizar el movimiento angular con la adquisición de las imágenes, ejecutando el procesamiento de las imágenes hasta la visualización tridimensional del fruto.
A partir de las imágenes tomadas con la cámara, se realiza la extracción de las siluetas del objeto mediante la segmentación de la imagen aplicando un valor de umbral para eliminar el fondo de la imagen (ver Figura 3). Dicho umbral se estimó mediante el algoritmo de Otsu [15], el cual elige el umbral óptimo maximizando la varianza entre clases (between-class variance) mediante una búsqueda exhaustive.

Posteriormente, para cada imagen se generan matrices 𝑆𝑖 de orden Np x 3, de forma que:
donde
Para obtener las coordenadas 3D de cada silueta, es decir la proyección
donde
Posteriormente, para cada matriz
donde λ es un incremento constante que sirve para garantizar la densidad de la malla del volumen generado por la silueta. La Figura 4 muestra los N volúmenes así generados.
Finalmente, el volumen total del objeto VT se obtiene empleando, que realiza la intersección de los N volúmenes parciales Vi:
Para la visualización del objeto se debe generar una malla 3D a partir de la nube de puntos obtenida. Esto se logra utilizando la triangulación de Delaunay [16], que es el proceso mediante el cual se generan triángulos entre los puntos para generar un mallado del objeto 3D.
Debido a que la técnica presentada genera una nube de puntos que van desde la superficie hasta la parte interna del objeto, la triangulación de Delaunay puede ser muy lenta y poco representativa de la forma del objeto. Por lo anterior, se desarrolló un algoritmo para eliminar los puntos internos de la nube y dejar sólo los pertenecientes a la superficie del objeto.
Este algoritmo está basado en dividir la nube de puntos VT del objeto, en cortes o capas como se muestra en la Figura 5. Como la nube de puntos es un arreglo matricial tridimensional, estas divisiones se obtienen tomando capas de igual altura (en este caso de un pixel).

A partir de cada capa, se obtiene una silueta de una sección del objeto, como si fuera su sección transversal. A dicha silueta se le aplica el algoritmo de Canny [17], para extraer únicamente el contorno de la silueta. De esta forma, el conjunto de todas las coordenadas de los contornos representa la nube de puntos de la superficie del objeto. Con esta nueva nube de puntos se puede aplicar la triangulación de Delaunay con la ventaja de que su procesamiento será más rápido y el resultado más realista de la forma del objeto.
Para validar el sistema se calcularon los volúmenes de diferentes objetos de dimensiones conocidas y se compararon los resultados con los valores analíticos.
2.2. Parámetros de forma
Las esferas y cubos son los únicos objetos cuyo tamaño se puede dar por solo un número (diámetro o longitud). Las partículas de polvo alimenticios son partículas anisométricas con formas irregulares y es necesario de varios parámetros de tamaño y forma para su caracterización [11]. La razón de elongación y planicidad son representados por las longitudes de tres ejes representativos: L (longitud del eje máximo), W (longitud del eje medio) y T (longitud del eje menor) [15]. Estas longitudes son equivalentes a las longitudes de los lados de un rectángulo sólido de límite de una partícula.
La razón de elongación (ER), ecuación (5), es definida con la razón de la dimensión intermedia (W) de la silueta y la dimensión larga (L). La razón de elongación para objetos circulares es igual a la unidad. Cuanto más alargada la forma, mayor es su factor de elongación (>1) [11]:
La razón de planicidad (FR) es definida como la razón de la dimensión corta (T) y la dimensión intermedia:
La razón de aspecto (AR) se define como la razón de la dimensión larga (L) y la dimensión intermedia:
El factor de forma (SF) ha sido utilizado para describir la irregularidad de la superficie y es definida como:
La Figura 6 muestra la variación que hay en el factor de forma (SF) y la razón de aspecto (AR) de las dimensiones de una partícula.

Los datos obtenidos a partir de la partícula en 3D permite la estimación de esfericidad Sp, que corresponde al factor de circularidad pero en 2D.
El valor de esfericidad está definido en un rango de 0 a 1, donde el valor más cercano a 1 indica que la partícula es más esférica [15]:
donde el diámetro nominal dn se calcula:
El área de superficie nominal sn :
El volumen V, así como las longitudes L, W y T de las partículas de aglomerados se pueden obtener a partir del modelo 3D del fruto de tomate.
3. Extracción de parámetros de forma
3.1. Fruto de tomate
Para este estudio se tomó una muestra de 50 tomates tipo bola de la mejor variedad el 13 de abril de 2017 a las 8:30 am. La muestra se obtuvo de una propiedad de invernadero de la Compañía Farmacéutica de Alto Grupo ubicada en la localidad de Colón, municipio de Ajuchitlán, estado de Querétaro, México. La muestra se almacenó en un refrigerador doméstico de Samsung. El almacenamiento, distribución de la muestra se dividió en tres secciones: dos con 24 frutos y la última con 2 frutos. El promedio de la temperatura y humedad relativa se mantuvo controlado a 4°C y 33% respectivamente, mientras que la temperatura y la humedad del ambiente variaron entre 26-29°C y 30-33%, respectivamente. Se utilizó una escala de precisión digital Taylor (modelo TE32C) para el registro diario de la masa de cada muestra, cuidadosamente etiquetada.
3.2. Procesamiento de imagen
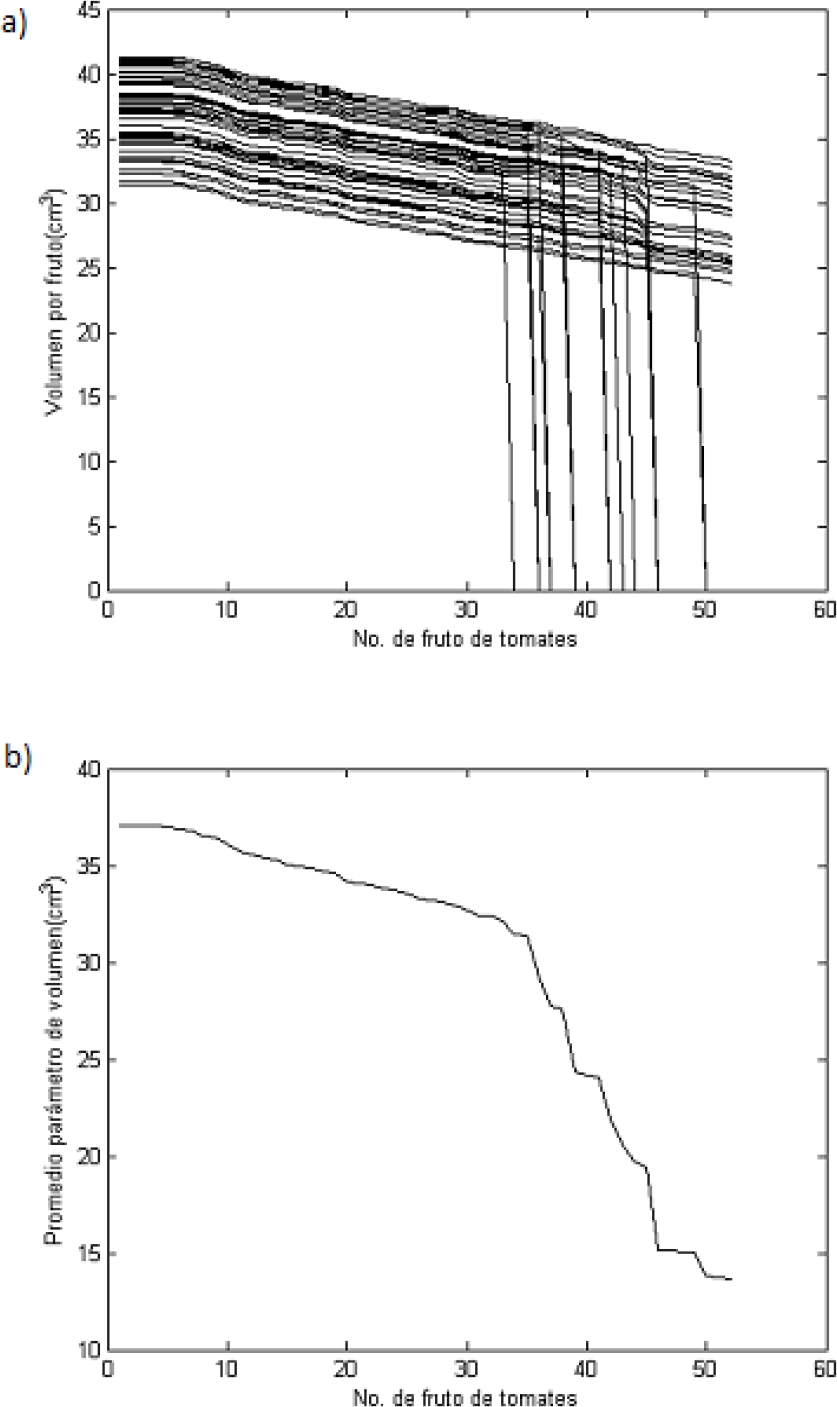
El fruto de tomate fue montado sobre el soporte de la base giratoria, como se presenta en la Figura 1. La figura 7 presenta el proceso de maduración del fruto de tomate, conforme pasan los días se observa que el volumen del tomate va disminuyendo.

La figura 8 presenta la imagen original del fruto de tomate, segmentación de la imagen, nube de puntos 3D y el modelo 3D del fruto.

Fig. 8 Representación del fruto de tomate: imagen original, imagen segmentada, nube de puntos y reconstrucción 3D
La tabla 1 presenta los resultados de las mediciones de los parámetros de forma de frutos de tomates, conforme pasaron los días de maduración fue cambiando el volumen y esfericidad.
Tabla 1 Parámetros de forma de fruto de tomate
| Días | V (mm3) | Área (mm2) | Peso (kg) | |
| 1 | 40.98 | 2899.0 | 0.217 | 0.91 |
| 5 | 39.89 | 2867.7 | 0.216 | 0.90 |
| 10 | 39.12 | 2821.7 | 0.215 | 0.90 |
| 15 | 38.92 | 2819.7 | 0.213 | 0.83 |
| 20 | 37.51 | 2785.9 | 0.212 | 0.79 |
| 25 | 35.13 | 2742.6 | 0.211 | 0.72 |
| 30 | 34.74 | 2730.2 | 0.21 | 0.69 |
| 35 | 33.46 | 2604.8 | 0.208 | 0.68 |
| 40 | 32.91 | 2515.5 | 0.207 | 0.64 |
| 45 | 31.80 | 2411.3 | 0.20 | 0.62 |
Los valores mínimo, máximo y promedio de volumen (medido con WDM y estimado con la técnica de reconstrucción 3D) se presentan en la tabla II. El factor escala fue obtenido utilizando objetos de dimensiones conocidas como una esfera perfecta. Estos valores se usaron para convertir unidades de medida de pixeles a cm3.
Tabla 2 Comparaciones de las mediciones de volumen mediante WDM y reconstrucción 3D
| Producto | Volumen (cm3) | ||
| MDA | Reconstrucción 3D | ||
| Tomate | Mínimo | 32.3101 | 31.8006 |
| Máximo | 41.9960 | 40.9805 | |
| Promedio | 37.1530 | 36.3905 | |
La estimación del volumen del fruto del tomate desarrollada en este trabajo presentó una alta precisión en términos de porcentaje de estimación del volumen en 3D (97.55%) y bajo error de aproximación (2.45%) en comparación con datos experimentales. Esto se logró mediante una estimación de proyección de vistas múltiples de imágenes que permitieron obtener el volumen en 3D. Por lo tanto, la metodología propuesta para la estimación del volumen en 3D del fruto del tomate desarrollado aquí puede ser una herramienta útil tanto para los productores como para los consumidores para gestionar mejor los desafíos logísticos del mercado poscosecha. En este contexto, lo desarrollado en este trabajo podría permitir a productores y consumidores reducir las pérdidas económicas que afectan al tomate durante el proceso de maduración y comercialización. Además, esta metodología permite estimar el volumen en 3D también y puede aplicarse a otras frutas con características climáticas similares de la región como: mango, plátano, manzana, aguacate, etc.
4. Conclusiones
El proceso de comercialización de la fruta de tomate en México requiere varios pasos logísticos para llevar las frutas frescas de la cosecha al consumidor. Dependiendo del mercado al que va dirigido (nacional o internacional), el manejo poscosecha del tomate incluirá: carga, transporte, recepción, almacenamiento, clasificación y venta. Hay pocos casos en que el productor agrícola tenga una conexión directa con supermercados, empresas de procesamiento de alimentos o consumidores finales. En el caso del mercado interno o nacional, existen dos canales de comercialización principales para el tomate: en el primero, el productor destina su producción envasada a los centros de suministro, tiendas de autoservicio y empresas de procesamiento para finalmente distribuirlo a los consumidores. En el segundo, los intermediarios recolectan la producción del agricultor y la envían a los mercados y almacenes locales.
Por otro lado, en el mercado internacional, los productores mexicanos de tomate envían su producción empaquetada a un corredor que está a cargo de canalizarla hacia tiendas de autoservicio y distribuidores que la hacen llegar al consumidor extranjero.
En este trabajo se presenta una estimación de volumen del fruto de tomate mediante una técnica de reconstrucción 3D basada en una cámara.
5. Trabajo futuro
Entre los resultados secundarios de este estudio se encuentra una base de datos con parámetros dimensionales como área, diámetro (longitudinal, señal y transversal), complementando la adquisición de imágenes digitales durante el proceso de maduración del fruto del tomate. Esta información permitirá estudios adicionales relacionados con la estructura física de la fruta relacionada con parámetros como características de la superficie, el color y sus cambios durante la maduración.

