











 nova página do texto(beta)
nova página do texto(beta) Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
Permalink1. Introducción
En años recientes, ha ido aumentado el interés, tanto académico como de la industria, por la interconectividad de las redes de Internet de las Cosas (IoT, por sus siglas en inglés). Un tema en boga es la difusion y el compartimiento de parámetros de manera eficiente en esta clase de redes.
Las redes IoT se consideran como una nueva generación de redes que combinan sensado o monitoreo de parámetros ambientales, como temperatura, humedad, CO2, y ajuste de la intensidad de la luz, mediante la trasmisión y procesamiento de datos y a través de técnicas de comunicación inalámbrica o redes Inalámbricas de sensores [3, 5], proporcionando una mejor elección para la difusión y el compartimiento de parámetros entre los sensores. Varios sensores son ubicados en casas o para generar datos sobre los estados ambientales y físicos de dichos parámetros.
Después de recolectar, transmitir, compartir, procesar y analizar los datos, se presentan problemas estructurales, tales como agregar nuevos dispositivos o nodos a la red y comunicar estos parámetros de manera centralizada y exitosa, como es el caso de la configuración estrella, a fin de predecir y adaptar de la red y, por ende, actualizar las mediciones generadas para que un nuevo requerimiento sea atendido [12].
Asimismo, es importante resaltar que para el 2020, la IoT alcanzará su masa crítica. Proporcionando una gran cantidad de inteligencia en la nube a billones de dispositivos móviles y contando con sensores extremadamente accesibles y completamente etiquetados, se entregará una enorme cantidad de nuevos valores a casi cualquier ser humano. Los beneficios completos, en términos de salud, seguridad y conveniencia, serán enormes[16].
La perspectiva es que para el 2020 estarán cuatro millones de personas conectadas con un beneficio económico de cuatro billones de dólares porque más de 55 millones de aplicaciones serán descargadas desde las tiendas de aplicaciones; por lo tanto, que se necesitarán más de 25 millones de unidades de microcontroladores (UMC), generando más de 50 billones de gigabytes de datos dentro de la red global IoT.
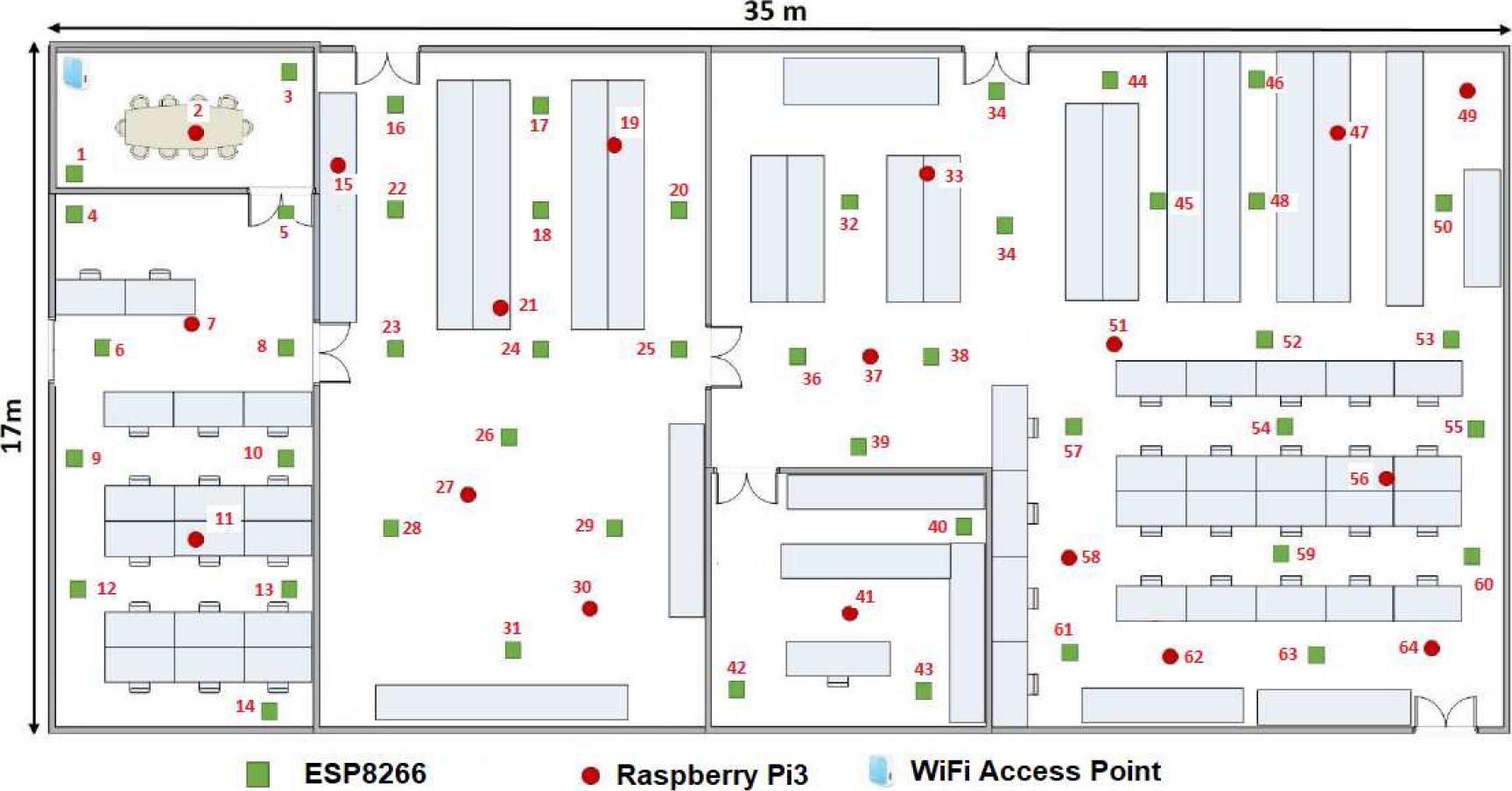
En la Figura 2 se muestra la distribución de planta de una casa convencional en los que se pueden ubicar dispositivos IoT. Una red IoT contiene un Punto de Acceso WiFi (PAW) que conecta todos los dispositivos a internet o intranet, como el principal nodo. Si un UMC quiere compartir algunos parámetros con otro UMC, estos UMC deben comunicarse con el PAW. Aún si estos UMC están físicamente muy cerca uno del otro, sino están conectados al PAW, no será posible establecer comunicación ni compartir parámetros.

Dado lo anterior, en este artículo se propone un método efectivo para la difusión y el compartimiento de parámetros en Redes Inalámbricas de Sensores (RIS) con inteligencia de enjambre [6, 13, 14].
Para ello, se usaron una gran cantidad de sensores conectados en red para sensar y monitorear en tiempo real diferentes parámetros, a fin de hacer más eficiente una red IoT y, por ende, estar en condiciones de aplicar dicha red en una propuesta de ciudad inteligente.
Las siguientes secciones de este artículo se organizan como sigue. En la Sección 2 se presenta la Descripción General. En la Sección 3 se ofrece una descripción detallada del Marco Teórico, describiendo los sistemas embebidos en la red IoT y la curva fractal de Peano. En la Sección 4 se describe el esquema principal propuesto. En la Sección 5 se presentan la simulación y la comparación para verificar que sea correcto y factible el esquema propuesto. Finalmente, en la Sección 6 se presentan las conclusiones a las que se llegan en este trabajo.
2. Descripción general de la propuesta
La propuesta en este artículo se basa en el principal trabajo realizado por Beni y Wang [1] en el que se introduce la expresión Inteligencia de Enjambre (IE) en su investigación sobre sistemas celulares de robots en 1993. El concepto de IE se aplica al trabajar con Inteligencia Artificial. La IE es una técnica computacional inteligente que se basa en el comportamiento colectivo de sistemas auto-organizados y descentralizados.
Un típico sistema IE se conforma de un grupo de agentes sencillos que interactúan localmente cada uno con los demás y con el medio ambiente que los rodea. Los UMC en un sistema de IE siguen reglas sencillas y actúan sin el control de entidades centralizadas. Sin embargo, las interacciones sociales entre tales UMC pueden generar enormes beneficios y frecuentemente conducir a un comportamiento global inteligente.
La Figura 1 muestra que algunos de los beneficios de la IE son: la optimización libre de derivados, la robustez, la flexibilidad, la facilidad de administración e implementación, lo que lleva a bajos costos computacionales y económicos.
La IE toma toda la ventaja de el enjambre; por ende, la IE es capaz de proveer soluciones optimizadas que aseguren gran robustez, flexibilidad y bajo costo para problemas sofisticados a gran escala sin un ente de control centralizado. Por consiguiente, la presente propuesta se divide en tres principales partes, con base en la IE:
Selección del UMC inicial o principal.
Generación de la topología en una distribución de planta dada.
Inclusión de todos los UMC dentro de una red IoT.
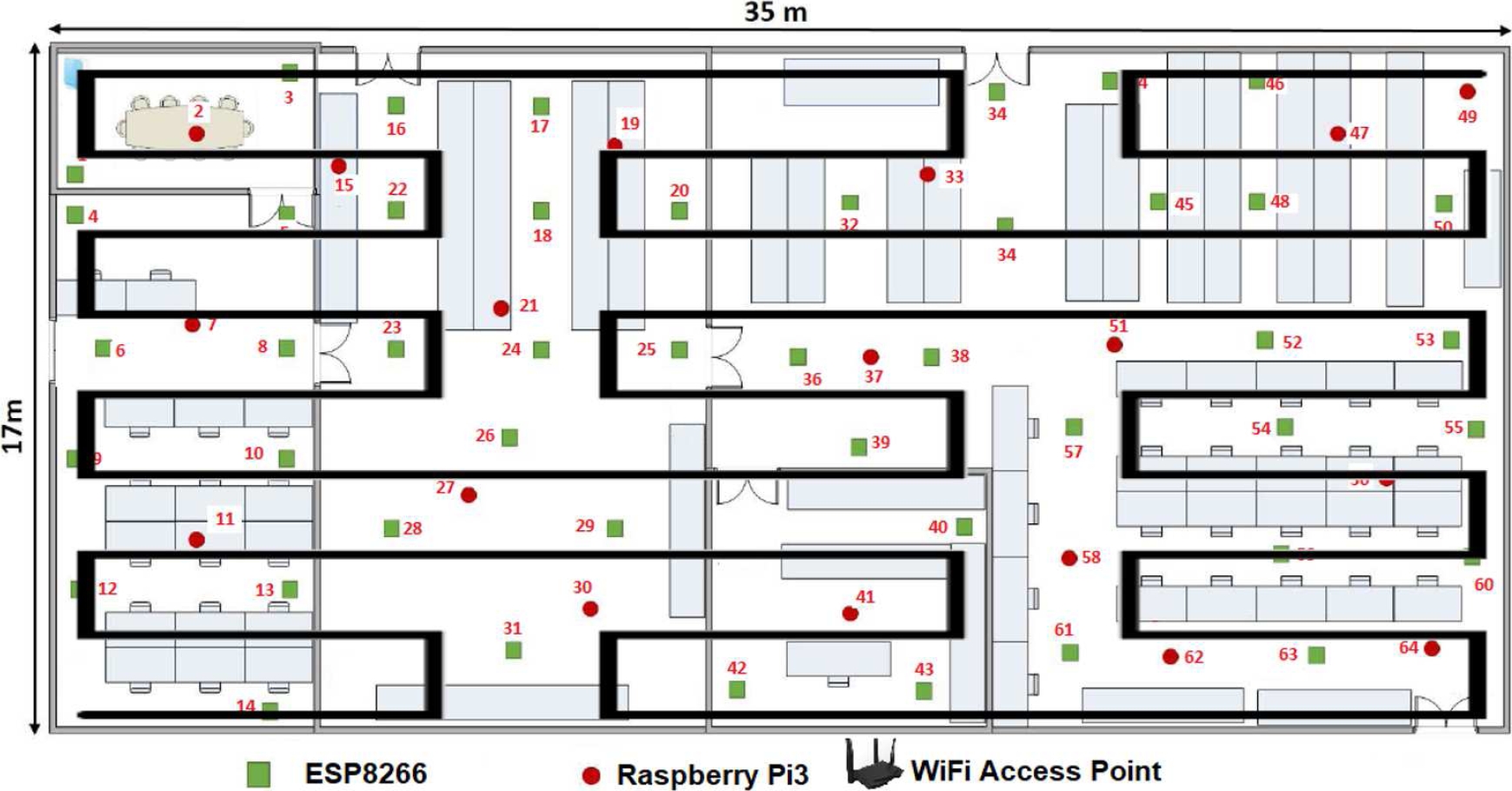
Por tanto, en la Figura 2 se presenta una distribución de planta, la cual consta de un PAW y diversos ESP8266 y RaspberryPi3, a saber, 64 sistemas embebidos. Adicionalmente, en la primera parte el UMC más cercano al PAW es elegido como el principal UMC.
Entonces, al medir el ancho de banda en megabits por segundo (Mbps), es posible predecir una topología para una distribución de planta dada; cuando se agrega un nuevo UMC, el algoritmo genera una nueva topología. Una vez generada la nueva topología, cada UMC o nodo de la red IoT se incluye mediante el fractal de Peano; entonces se mide la efectividad de la metodología para compartir parámetros a lo largo y ancho de la red, por lo que los algoritmos Wi-Fi Peer-to-Peer (P2P) y SoftAP se configuran.
3. Marco teórico
Esta sección se subdivide en tres subsecciones:
3.1. Sistemas embebidos en la red IoT propuesta
El sistema embebido NodeMCU ESP8266, descrito en la Figura 3(a), es una tarjeta de desarrollo similar a la de Arduino, pero orientada especialmente a IoT. Dicha tarjeta se basa en el Sistema en Chip (SeC) ESP8266, un chip altamente integrado y diseñado para las necesidades de un mundo conectado. Además, esta tarjeta integra un procesador con la arquitectura de 32 bits (más poderosa que la del Arduino Due) y una conectividad de fidelidad inalámbrica o WiFi (wireless fidelity).
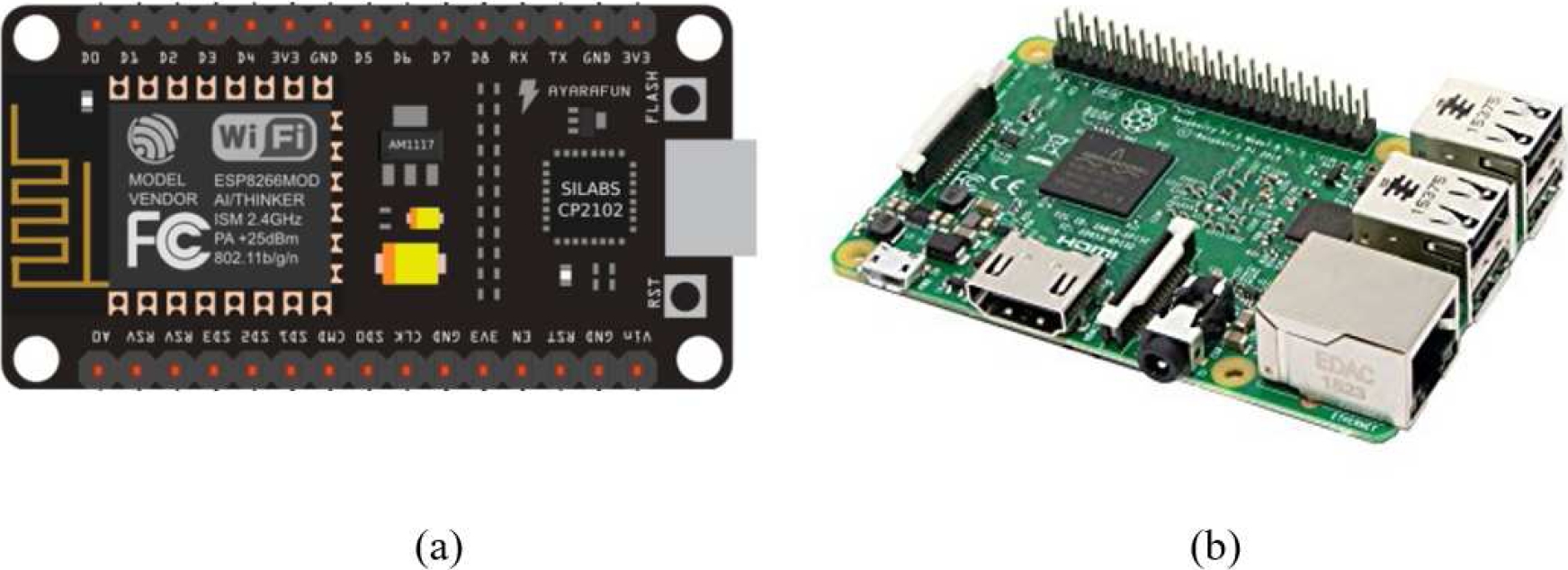
Fig. 3 Sistemas embebidos en la red IoT (a) Sistema embebido NodeMCU ESP8266 (UMC-ESP8266) y (b) Sistema embebido Raspberry Pi 3 (UMC-RPi3)
Para el desarrollo de aplicaciones se puede elegir entre los lenguajes Arduino y LUA. Al trabajar en un ambiente Arduino, se puede usar un lenguaje ya conocido y emplear un IDE simple de utilizar; asimismo, se puede hacer uso de toda la información sobre proyectos y librerías disponibles en la internet.
La comunidad usuaria de Arduino está muy activa y apoya plataformas como la ESP8266. El NodeMCU tiene preinstalado el firmwire (o sistema operativo interno de la tarjeta) que permite trabajar con el lenguaje interpretado LUA, enviando comandos a través del puerto serial (CP2102).
Las minitarjetas NodeMCU y Wemos D1 son las plataformas más usadas en los proyectos IoT. Dichas tarjetas no compiten con la Arduino, ya que éstas persiguen diferentes objetivos, aunque es posible programar NodeMCU a partir del IDE de Arduino. La tarjeta NodeMCU está especialmente diseñada para trabajar en un ambiente de desarrollo integrado. Esta tarjeta tiene un regulador de voltaje de corriente directa, el cual permite alimentar directamente la tarjeta desde el puerto USB. Los pins (o patillas) de entrada/salida trabajan a 3.3 volts. El chip CP2102 maneja la comunicación con puertos seriales USB. El NodeMCU cuenta con las siguientes especificaciones técnicas:
– Alimentación (USB): 5 voltios de corriente directa,
– Voltajes entrada / salida: 3.3 voltios de corriente directa,
– SeC: ESP8266 (modulo ESP-12),
– CPU: Tenselica Xtensa LX # (32 bits),
– Frecuencia de reloj: 80 MHz / 160 MHz,
– Memoria RAM para instrucciones: 32 Kb,
– Memoria RAM para datos: 96 Kb,
– Memoria Flash externa: 4 MB,
– Pins digitales GPIO: 17 (pueden ser configurados como PWM a 3.3 voltios),
– Pin analógico de corriente alterna / directa: 1 (0 – 1 voltio),
– UART: 2,
– Chip de puerto serial: CP2102,
– Certificación FCC,
– Antena en PCB,
– 802.11 b/g/n,
– WiFi directo (P2P), Soft-AP,
– Pila de protocolos TCP / IP integrada,
– PLLs, reguladores, DCXO y administración de potencia integrada,
– Potencia de salida de 19.5 dBm en modo 802.11 b,
– Fuga de corriente menor a 10 uA,
– STBC, 1 1 MIMO, 2 1 MIMO,
– Agregación A-MPDU y A-MSDU e intervalo de guardia de 0.4 msl,
– Paquetes de activación y trasmisión < 2ms,
– Consumo de energía en espera < 1.0mW (DTIM3).
El sistema embebido Raspberry Pi 3, mostrado en la Figura 3(b), es la solución multiproceso más avanzada de esta marca hasta el momento. Debido a que la primera Raspberry, llamada Raspberry Pi Modelo B, se introdujo en 2012, más de ocho millones de unidades han sido vendidas, en aquel entonces con 256 MB de RAM. Las nuevas versiones incluyen mejoras en sus características, logrando la Raspberry Pi 3 Modelo B (UMC-RPi3).
A continuación, se mencionan algunas características y ventajas de la UMC-RPi3, por si se busca trabajar con una solución multiproceso. La solución multiproceso Raspberry Pi 3 incluye una serie de ventajas y novedades con respecto al modelo anterior, la Raspberry Pi 2 Modelo B.
Primeramente, la Raspberry Pi 3 tiene un procesador mucho más rápido y potente, el cual tiene un ARM Cortex con 4 núcleos, 1.2 GHz y 64 bits. Su ejecución es, al menos, 50 por ciento mayor que la versión anterior. Asimismo, esta nueva solución multiproceso cumple con uno de los mayores deseos de sus principales clientes: conectividad inalámbrica WiFi y Bluetooth. Los modelos anteriores podían conectarse solamente a través de cable Ethernet o mediante adaptadores inalámbricos USB, de tal manera que esta versión facilita muchísimo las tareas de conectividad. La UMC-RPi3 incluye un Bluetooth 4.1 y una tarjeta de red inalámbrica WiFi 802.11n.
Aunado a lo anterior, este nuevo modelo cambio sustancialmente de tamaño y sólo agrega modificaciones en la posición de las luces LED. Por otra parte, la UMC-RPi3 cuenta con las mismas características incluidas en la versión 2: 1 GB de RAM, cuatro puertos USB, puertos HDMI y Ethernet, micro SD, cámara CSI, entre otros; lo que permite su total compatibilidad con las versiones Cero y 2. La marca Raspberry recomienda usar dicha solución multiproceso en las escuelas para propósitos generales y para los proyectos integrados Pi Cero y el Modelo A +.
Cabe destacar que una de las grandes ventajas de la UMC-RPi3 es su precio. Muchas empresas, escuelas y centros de investigación utilizan soluciones multiproceso para crear una estructura más segura, pero que ofrezca todo tipo de aplicaciones: desde crear un miniservidor de correos electrónicos hasta una estación FM de baja gama.
Las especificaciones completas para la Raspberry Pi 3 incluyen:
– CPU: Quad-core 64-bit ARM Cortex A53, con reloj a1.2 GHz,
– GPU: 400 MHz VideoCore IV multimedia,
– Memoria: 1 GB LPDDR2-900 SDRAM (por ejemplo, 900 MHz),
– Puertos USB: 4,
– Salidas de video: HDMI, video compuesto (PAL y NTSC) vía 3.5 mm jack,
– Red: 10 / 100M bps Ethernet y tarjeta inalámbrica LAN 802.11n,
– Periféricos: 17 GPIO, más funciones específicas, y bus HAT ID,
– Bluetooth: 4.1,
– Fuente de alimentación: 5 voltios vía Micro-USB o GPIO header (o cabezal),
– Dimensiones: 85.6 0mm x 56.5 mm,
– Peso: 45 g (1.6 oz).
3.2. Wi-Fi Peer-to-Peer
El Wi-Fi Peer-to-Peer (P2P) y el SoftAP son protocolos de comunicación que permiten una conexión directa entre los dispositivos WiFi donde sea, por lo que no se requiere un punto de acceso inalámbrico o PAW. Mediante la negociación, un dispositivo llega a ser el Dueño del Grupo y los demás los clientes. La conexión inicial está diseñada para ser rápida y fácil; su implementación no requiere adicionar hardware nuevo, permitiendo a los usuarios WiFi existentes agregar nuevos dispositivos a sus productos con sólo actualizar un software.
Por un lado, el protocolo WiFi Peer-to-Peer está diseñado para reemplazar el protocolo ad-hoc heredado para la interconexión de dispositivos WiFi. Las mejoras sobre el protocolo ad-hoc incluyen conexión más segura y lo último en seguridad, 802.11i. Este protocolo se diseñó para satisfacer la creciente necesidad de conexiones dinámicas entre grupos de dispositivos electrónicos. Esto les permite a los fabricantes de equipo original crear productos que puedan interoperar con los demás y con dispositivos de consumo comunes, tales como teléfonos inteligentes, tabletas, cámaras e impresoras. Como cualquier otro dispositivo WiFi, el rango alcanza hasta 200 m, haciendo una conexión apropiada aún con dispositivos que no se encuentren muy cercanos.
Por otro lado, el protocolo SoftAP ofrece a un dispositivo capacidades limitadas de punto de acceso WiFi. Cuando se combina este protocolo con el WiFi P2P, es posible que el dispositivo elegido como punto de acceso WiFi sea el Dueño del Grupo; sin esta combinación, este dispositivo podría participar sólo como un cliente más.
3.3. La curva Fractal de Peano
A Mandelbrot se le considera el padre de la geometría fractal. Sin embargo, muchos fractales y sus descripciones se remontan a las matemáticas clásicas y los matemáticos del pasado como Georg Cantor (1872), Guiseppe Peano (1890), David Hilbert (1891), Helge von Koch (1904), Waclaw Sierpinski (1916), Gaston Julia (1918) o Felix Hausdorff (1919), entre otros. Mandelbrot demostró que estos fractales matemáticos iniciales tienen muchas características en común con las formas encontradas en la naturaleza; de ahí el título de su libro en 1982: La geometría fractal de la naturaleza [8].
Mandelbrot dio un giro en la interpretación matemática ortodoxa e invirtió el valor de estos monstruos matemáticos. En 1890 Guiseppe Peano [10] (1858-1932) y en 1891 David Hilbert [4] (1862-1943) abordaron las llamadas curvas que llenan el plano que las contenga. La Figura 4 indica los primeros pasos de la construcción iterativa de la curva original de Peano.
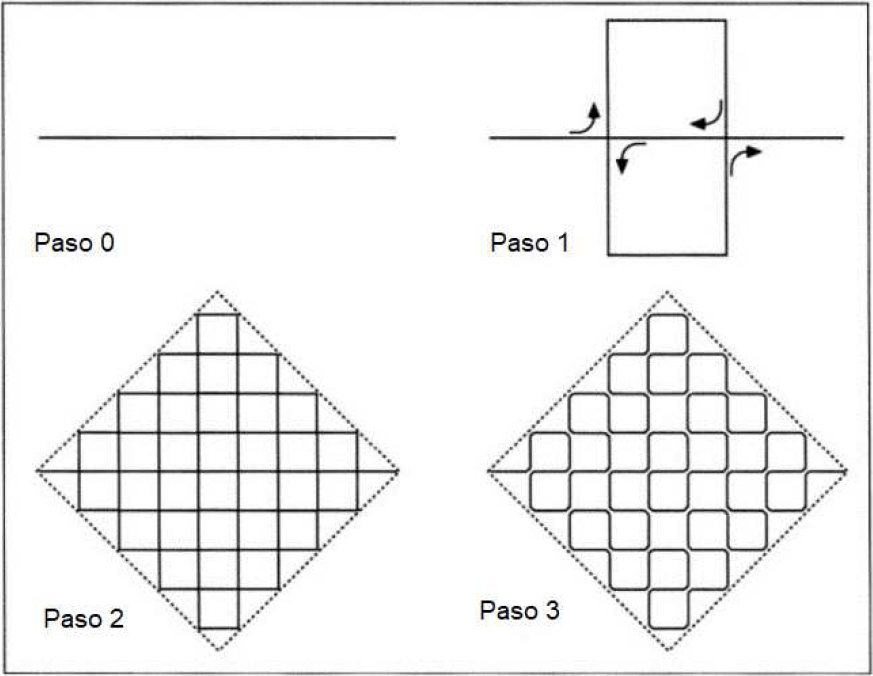
Fig. 4 Construcción de la curva de Peano: Construcción de una curva que llena el espacio que la contiene con iniciador y generador. En cada paso un segmento de línea se remplaza por 9 segmentos reducidos por un factor de 3
Para construir la curva de Peano se inicia con un segmento de línea unitario, el iniciador, que se sustituye por una curva generadora, como se muestra en la Figura 4.
Aparentemente, el generador tiene dos puntos de auto-intersección en la curva. Obsérvese que esta curva generadora ajusta muy bien a un cuadrado, el cual se muestra en líneas punteadas. Este es el cuadrado cuyos puntos serán alcanzados por la curva de Peano. Para el paso 2 se toma cada segmento de la línea recta del paso 1 y se remplaza apropiadamente por el generador; el factor de escalamiento es 3. Hay un total de 32 puntos que se auto-intersectan en la curva. Esto se repite, es decir, en cada paso, los segmentos de línea se reducen por un factor de 3.
Por tanto, en el paso kth, un segmento de línea tiene longitud
En 1968 el biólogo Aristid Lindenmayer inventó una formalización para describir el crecimiento de una planta, que es también muy apropiada en implementaciones computacionales, conocida actualmente como sistema de reescritura paralela o sistema L [7, 15].
En un sistema L existen reglas de (re)producción que establecen los mecanismos a través de los cuales se da el crecimiento del sistema o fenómeno en estudio, así como un estado inicial del sistema o fenómeno llamado axioma. Las reglas de producción (o de reescritura) determinan que tanto una cadena de entrada se transforma en una cadena de salida. Los sistemas L son máquinas de reescritura de cadenas que se caracterizan por el hecho de que las reglas de producción se aplican simultáneamente a todos los símbolos de la cadena de entrada. Lindenmayer intentó capturar, por ejemplo, la división celular en organismos multicelulares, en donde muchas divisiones pueden ocurrir al mismo tiempo.
Con el propósito de establecer el mecanismo de crecimiento para los fractales clásicos, se recomienda aplicar el enfoque de los sistemas L, resultando en cadenas de símbolos que deben interpretarse gráficamente. Esta interpretación es independiente de la generación de la cadena. A continuación se presenta una interfaz gráfica muy sencilla para cadenas de símbolos [11], la cual se basa en el concepto de gráficas de tortuga de Seymour Papert [9], especialmente apropiada para curvas en el plano. Con tal interpretación es posible formular las construcciones originales de los fractales clásicos de manera compacta y muy concisa, es decir, como un sistema L con solo algunas reglas de producción.
Imagínese una tortuga completamente entrenada para entender algunos comandos que se le dan en forma de símbolos (a partir de la lista de símbolos usados en el sistema L). Estos símbolos serán sólo letras comunes del alfabeto y algunos símbolos especiales como + o −. A continuación se presenta el primer conjunto de instrucciones para la tortuga: F (moverse hacia adelante un paso de longitud l y dibujar una línea desde la vieja a la nueva posición), + (girar a la izquierda, contrario a las manecillas del reloj, en un ángulo δ) y − (girar a la derecha, en sentido a las manecillas del reloj, en un ángulo δ).
La Figura 5 muestra de nuevo la construcción de la curva de Peano. Su construcción comienza solo con un segmento de línea. Esta curva (que se sustituirá por simples segmentos de línea) puede codificarse de diversas maneras. Después de un paso hacia adelante, la tortuga gira a la izquierda o a la derecha, o puede seguir en línea recta.

Fig. 5 La curva de Peano. Construcción de una curva que llena el espacio que la contiene: la curva de Peano. El axioma y la producción (parte superior); la segunda y la tercera etapas (parte inferior)
Por ejemplo, después de girar a la derecha, debe haber dos giros a la izquierda con segmentos de línea entre los tres giros. Por tanto, la tortuga ha logrado llegar a un punto en donde la curva se encuentra con ella misma, y hay una elección, continuar en la misma dirección o dar un giro a la izquierda. En ambos casos la tortuga trazará el bucle superior del generador en sentido contrario a las manecillas del reloj o en dirección a las manecillas del reloj; y sólo entonces, habrá terminado el último segmento de línea al final de la curva.
En términos de los comandos de la tortuga, estas dos alternativas pueden describirse como sigue (en cualquier caso, se elige δ = 90o):
– F –F + F + F + F –F –F –F + F,
– F –F + F + F F + F + F + F F.
Si la tortuga continúa en la misma dirección en el punto de la primera decisión, se tiene:
– F F –F –F –F F –F –F + F, o
– F F + F + F + F F + F + F –F.
El sistema L completo puede trabajar con cualquiera de estas decisiones, por ejemplo, se puede establecer:
4. Difusión y compartimiento de parámetros en una red IoT
4.1. Selección del UMC inicial o principal
Nuestro algoritmo considera que el punto de acceso WiFi, PAW, está en una posición aleatoria dentro del cuarto, pero conectado a al menos un UMC en la red IoT. Al inicio, todos los UMC intentan conectarse al PAW; si éstos no establecen la conexión, la opción de WiFi directo se habilita. Los UMC que se conectan al PAW inhabilitan el modo WiFi directo, para que sean instruidos de otra manera. Así, el PAW se configura con el modo de difusión, enviando paquetes para medir la banda ancha de cada miembro o nodo en la red IoT.
Desde este momento empleamos un Identificador de Red UMC (IRU), el cual contiene el tipo de UMC, para UMC-ESP8266 o para UMC -RPi3, así como un byte objetivo para la identificación interna de la IoT. Por ejemplo, un IRU=UMC-ESP8266-i se refiere al ESP8266, el cual se identifica como el ith sistema embebido dentro del cuarto, sin importar el tipo o características de la UMC. Debido al material con el que están hechas las paredes del cuarto, la conexión se realiza sólo con algunos UMC; en cantidad, estos UMC deben ser menores o iguales que 3k, como se muestra en la ecuación 1:
donde IoT e es el número de sistemas embebidos en la red, i es el índice del Identificador de la Red UMC, IRU, y k es el nivel (o iteración) del fractal de Peano, definido por la ecuación 2:
De acuerdo a lo anterior, es posible definir a UMCi=1 como el UMC conectado más cercano con el PAW, ya que este alcanza la velocidad más rápida de conectividad de los enlaces IoT e. Por tanto, UMC1 es indexado como el primer nodo en la red.
4.2. Generación de la topología en una distribución de planta
Una vez identificado UMCi=1 como el nodo principal en una red IoT, los sistemas embebidos UMCi=1 contenidos en la red IoT habilitan el modo WiFi directo y completan una tabla con el ancho de banda de los nodos próximos a estos sistemas embebidos, a fin de generar una Lista de Nodos Alcanzables (LNA) específica; entonces, la red IoT propuesta puede generar 9k LNA.
Aunado a lo anterior, cada LNAi contiene el ancho de banda de todos los UMCi que deben conectarse, al menos, a otro UMCi.
Las LNA están compartidas y
Este segundo paso no tiene como paradigma la optimización ni la inteligencia. Por ende, es importante aplicar herramientas de la inteligencia de enjambre para mejorar estos resultados iniciales.
4.3. Indexando todos los UMC dentro de la red IoT
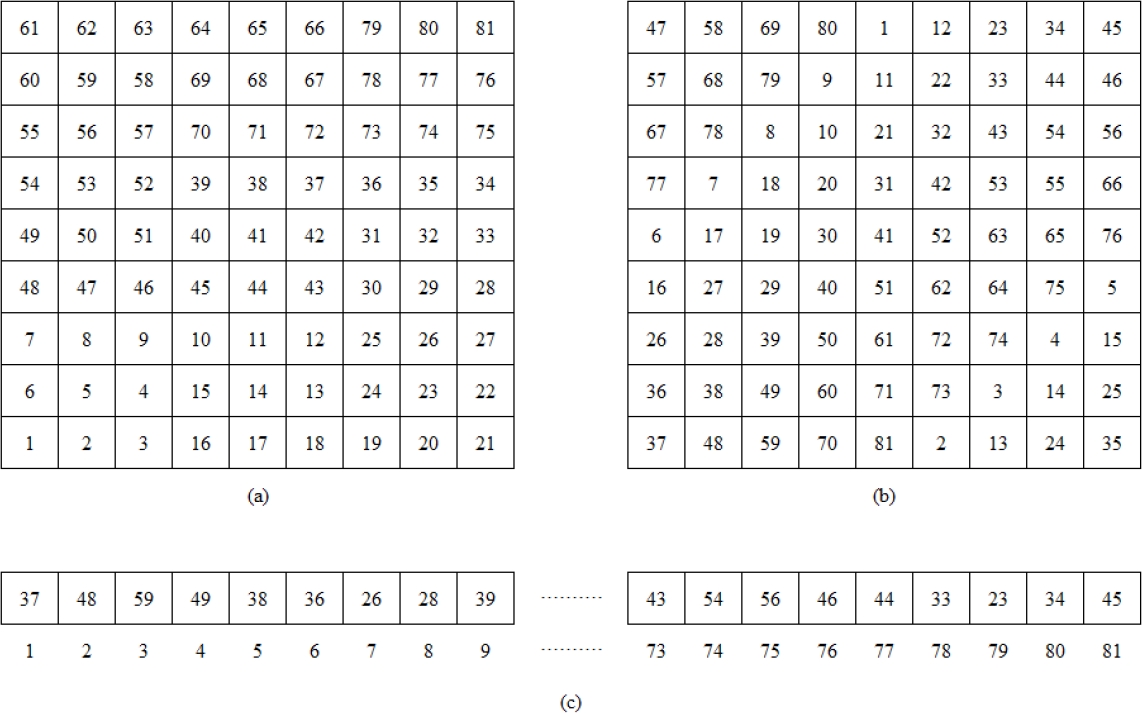
Con base a lo anterior, cada nodo tiene un índice inicial en la red, el cual al principio no está optimizado. Para optimizarlo, todos los elementos deben numerarse, según el fractal de Peano y la posición por donde cada nodo pasa.
Una indexación lineal se desarrolla para identificar el arreglo matricial UMCi como un vector.
Se define el arreglo matricial de microcontroladores UMC como

El nivel k de θ se adquiere concatenando cuatro diferentes transformaciones θ en el nivel previo n − 1. El Algoritmo 1 genera la matriz de mapeo de Peano θ, donde
Por tanto, cada UMCi en
De acuerdo a lo anterior, los nodos i son consecutivos y están comunicados al nodo i + 1. En el caso de que en la topología actual no haya UMCi en una determinada posición i, el índice que esté más cercano i − 1 se alcanza y este UMCi se considera como un nodo no significante (NNS); de otra manera, el nodo se considera nodo significativo (NS). Es importante resaltar que en el caso de que este nodo UMCi+1 sea NNS, el nodo UMCi alcanza a un NS, incrementando i hasta alcanzarlo.
A fin de conocer la significancia de la red IoT, proponemos una Cadena de Significancia de la Red (CSR) con 9k bits; 0 para NSN y 1 para NS. La CSR es propagada a UMCi con pocos nanosegundos.
Cada UMCi mide o evalúa ciertos parámetros como la temperatura, humedad, CO2 y ajuste de las luces ambientales. Para diferenciar los parámetros, proponemos un marcador de 1 byte que indique específicamente cuál parámetro que un sensor mida o identificador del sensor (IS) esté en unidades de grados Celsius o voltaje, por ejemplo. La Tabla 1 muestra algunos ejemplos de parámetros que un UMCi puede medir, así como un IS de 1 byte que indique hasta 256 parámetros.
Table 1 Ejemplos of identificador de Sensor o IS
| Etiqueta | Parámetro |
| 00H | Temperatura |
| 01H | Humedad |
| 02H | Sensores infrarrojos pasivos |
| 03H | RFID |
| 04H | Control de puerta |
| 05H | Control de temperatura |
| 06H | Bioritmia |
| 07H | Biosensores |
Cada valor del parámetro que mida un UMCi se representa por un identificador de 2 bytes de longitud SM, el cual se divide en tres partes: signo, exponente ε y mantisa µ (Figura 8).
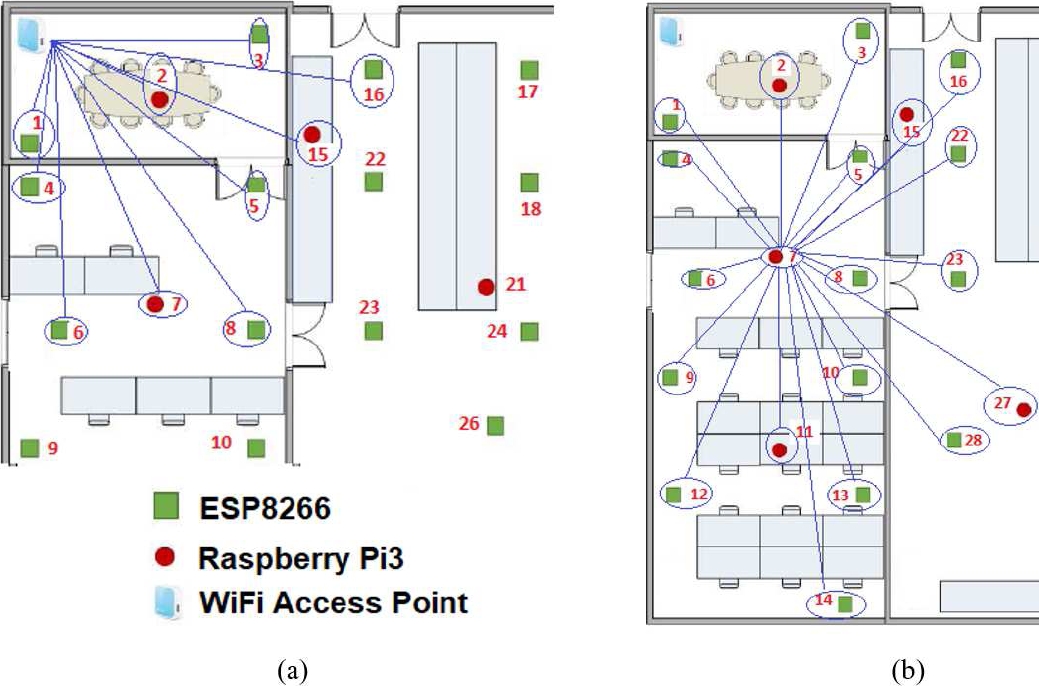
Fig. 7 Resultados experimentales: (a) Estimación de la velocidad de enlace de cada nodo en la red IoT y (b) Nodos alcanzables para UMC-RPi3-7

El bit más significativo del marcador es el signo del parámetro, 0 para positivo y 1 para negativo. Los últimos diez bits significativos se emplean para la ubicación de µ, el cual está definido por [2] como:
La ecuación (4) expresa cómo ε se obtiene, el cual se almacena en los cinco bits restantes del marcador SM:
donde R es el numero de bits usados para representar el valor más alto de cierto parámetro, definido como:
5. Resultados experimentales
En esta sección extendemos lo expuesto en la sección anterior. Asimismo, utilizamos la distribución de planta de la Figura 2 y damos seguimiento a la siguiente cantidad de UMC:
– 46 UMC-ESP8266,
– 18 UMC-RPi3.
Es importante notar que usamos un PAW para conectar la red IoT a la internet como el nodo inicial con las siguientes características: router inalámbrico Tenda N300, repetidor inalámbrico de señal, IEEE del estándar 802.11 b/g/n RJ45 con 4 puertos a 300 Mbps. Con base en la Figura 2, en la Figura 7 (a) se aprecia que el PAW se ubica en la esquina superior derecha.
Al inicio todos los UMC intentan conectarse al PAW; si éstos no establecen la conexión, la opción de WiFi directo es habilitada. Los UMC que se conectan al PAW deshabilitan el modo de WiFi directo hasta que reciben otra instruccion. Entonces, el PAW se configura en el modo de difusion, enviando paquetes para medir el ancho de banda de cada miembro o nodo en la red IoT. A partir de este momento, usamos el Identificador de Red UMC, IRU, el cual contiene el tipo de UMC, ya sea del UMC-ESP8266 o del UMC-RPi3, así como el byte objetivo para la identificación dentro de la intranet IoT.
Por ejemplo, un IRU=UMC-ESP8266 se refiere a un ESP8266, el cual fue identificado como el octavo sistema embebido dentro del cuarto, sin importar el tipo o características del UMC. Debido al tipo de material del que están hechas las paredes, la conexión se realiza sólo para los diecisiete UMC, cuyas velocidades se describen en la Tabla 2. Dicha tabla sólo muestra los primeros diez UMC conectados al PAW. Es por ello que podemos definir el UMC-ESP8266-1 como el UMC más cercano que está conectado con el PAW, ya que este UMC alcanza una velocidad de enlace de 198.75 Mbps y el UMC más lejano es el UMC-ESP8266-16 con una velocidad de conexión de 52.94 Mbps. El UMC-ESP8266-1 está indexado como el primer nodo en la red.
Table 2 Ancho de banda (Mbps) de los primeros diez UMC dentro de la red IoT
| Identificador deRed UMC | DistanciaLineal (m) | DistanciaReal (m) | Ancho debanda (Mbps) |
| UMC-ESP8266-1 | 3 | 3 | 198.75 |
| UMC-ESP8266-4 | 4 | 12 | 116.15 |
| UMC-ESP8266-6 | 7.5 | 13 | 106.93 |
| UMC-RPi3-7 | 7 | 11 | 127.65 |
| UMC-ESP8266-8 | 9 | 11.5 | 120.52 |
| UMC-ESP8266-5 | 6.5 | 6.5 | 166.98 |
| UMC-RPi3-2 | 3.5 | 3.5 | 193.50 |
| UMC-RPi3-15 | 8 | 16 | 79.64 |
| UMC-ESP8266-16 | 8.5 | 19 | 52.94 |
| UMC-ESP8266-3 | 6 | 6 | 170.45 |
Una vez que el UMC-ESP8266-1 es identificado como el nodo principal o Nodo 1 en la red IoT, todos los UMC, incluido el UMC-ESP8266-1, habilitan el modo WiFi directo y completan la tabla con el ancho de banda de los nodos próximos a ellos, a fin de generar la Lista de Nodos Alcanzables, LNA. Cada UMC genera una LNA particular; por ejemplo, en la Figura 7 (b) se visualizan los identificadores de red UMC, IRU, a los que el nodo UMC-RPi3 puede conectarse.
Según la Figura 2, nuestro ejemplo genera 64 LNA. Además, en la Tabla 3 se muestra el LNA-7, es decir, el ancho de banda de diecinueve UMC, el cual establece conexión con el UMC-RPi3-7. Como se observa, los UMC-ESP8266-6 y UMC-ESP8266-8 alcanzan los mayores anchos de banda para el Nodo 7, con 201.23 Mbps y 198.52 Mbps, respectivamente.
Table 3 Lista de los Nodos Alcanzables LRN7, generados por el UMC-RPi3-7
| IRU | DistanciaLineal (m) | DistanciaReal (m) | Ancho debanda (Mbps). |
| UMC-ESP8266-1 | 5.50 | 10.40 | 129.99 |
| UMC-ESP8266-4 | 4.50 | 4.50 | 183.19 |
| UMC-ESP8266-6 | 2.50 | 2.50 | 201.23 |
| UMC-ESP8266-9 | 5.00 | 5.00 | 178.68 |
| UMC-ESP8266-12 | 8.00 | 8.00 | 151.63 |
| UMC-RPi3-11 | 6.00 | 6.00 | 169.67 |
| UMC-ESP8266-14 | 10.50 | 10.50 | 129.09 |
| UMC-ESP8266-13 | 7.50 | 7.50 | 156.14 |
| UMC-ESP8266-10 | 4.50 | 4.50 | 183.19 |
| UMC-ESP8266-28 | 8.20 | 10.40 | 129.99 |
| UMC-RPi3-27 | 9.30 | 9.70 | 136.30 |
| UMC-ESP8266-8 | 2.80 | 2.80 | 198.52 |
| UMC-ESP8266-23 | 6.00 | 6.00 | 169.67 |
| UMC-ESP8266-22 | 7.20 | 9.80 | 135.40 |
| UMC-ESP8266-16 | 8.40 | 13.50 | 102.04 |
| UMC-RPi3-15 | 6.30 | 11.25 | 122.32 |
| UMC-ESP8266-5 | 4.45 | 4.45 | 183.64 |
| UMC-ESP8266-3 | 7.25 | 7.25 | 158.39 |
| UMC-RPi3-2 | 5.30 | 8.75 | 144.87 |
Asimismo, la Figura 7(b) muestra la posición dentro del cuarto y el IRU de cada UMCi, a saber, la mejor manera de comunicación para UMC64 es el UMC9, aumentando el ancho de banda, y así sucesivamente. De igual forma, la Figura 9 muestra una interpretación visual de la generación de una indexación lineal mediante el fractal de Peano en k = 2.
En este trabajo ejecutamos miles de requerimientos o solicitudes a partir de los nodos más lejanos, es decir, desde UMC64 hasta UMC1 y desde UMC8 hasta UMC57. En promedio, el enlace UMC64 ↔ UMC1 obtiene un ancho de banda de 192.85 Mbps, y para el caso de UMC8 ↔ UMC57 se obtiene un ancho de banda de 190.21 Mbps. En ambos casos se habla de una topología central, en la que no es posible conectar UMC64 ↔ UMC1 ni UMC8 ↔ UMC57.
6. Conclusiones
Reducir el consumo de energía es un objetivo primordial en el diseño de cualquier sistema de comunicación para Redes Inalámbricas de Sensores. La mayor parte de esta energía puede ahorrarse agregando más nodos o dispositivos inalámbricos a estas redes, ya que la mayoría de la información obtenida es redundante debido a la ubicación geográfica de los sensores. Por tanto, el esquema eficiente de difusión considera el compartir parámetros que hayan sido propuestos. Sin embargo, esto continúa implicando altos costos en la comunicación, lo que dificulta el compartimiento de los parámetros elegidos.
Es por ello que en este trabajo se ha propuesto un algoritmo ligero de difusión en redes inalámbricas de sensores. A partir de un análisis realizado, confirmamos que el esquema de reconfiguración de una red IoT genera un mayor tiempo de vida de la red como información más eficiente del parámetro a sensar, con respecto a los esquemas o topologías tradicionales.
Además, se determinaron algunos parámetros conectados a un UMCi particular de toda la red IoT en microsegundos, lo que es congruente con la definición de tiempo real. Asimismo, el algoritmo propuesto se apoya en la Inteligencia de Enjambre, ya que cada UMCi aprende del resto de los miembros o nodos de la red IoT y sabe lo que sucede, aún si no está conectado a a otro nodo. Para el caso práctico presentado en este trabajo, los enlaces más lejanos entre MCU’s obtiene un ancho de banda promedio efectivo entre 190.21 Mbps y 192.85 Mbps, cuando en una topología tradicional tipo estrella no tendrían ni siquiera comunicación o enlace entre ellos.

