











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1. Introducción
Los dispositivos móviles multifuncionales de altas prestaciones, bajo consumo de energía, y bajo costo que proliferan en la actualidad, son los dispositivos que poseen la capacidad de materializar a las redes móviles ad hoc (MANETs) 3, 26, 4. Dichas redes finalmente pueden brindar el soporte ideal a las aplicaciones distribuidas pensadas para dispositivos en movimiento 7, 33. Estas aplicaciones (por ejemplo, de búsqueda y rescate) requieren comunicación uno a uno, muchos a muchos y en algunos casos información de localización para alcanzar sus objetivos 23, 16. No obstante, en un escenario como éste, en realidad es muy bajo el porcentaje de nodos interesados en mantener algún tipo de comunicación y/o servicio de localización. Asimismo, los requerimientos que demandan aplicaciones con estas características contrastan con la forma de operar de los algoritmos de enrutamiento y posicionamiento que se usan hasta hoy. Primero, porque dichos algoritmos fueron diseñados para soportar ya sea enrutamiento o posicionamiento, y por lo tanto soportar simultáneamente comunicación uno a uno, muchos a muchos o un servicio de localización que requiere ejecutar en paralelo un protocolo para cada uno de ellos, lo cual es ineficiente desde el punto de vista de utilización de ancho de banda. Segundo, porque estos protocolos de enturamiento y posicionamiento, que operan bajo demanda o de manera proactiva, hacen que la red sea inundada frecuentemente para mantener información actualizada, lo cual no es escalable.
Las principales contribuciones de este trabajo son: (1) La introducción de un marco de trabajo para enrutamiento y posicionamiento integrados en MANETs. Como instancia de este marco de trabajo se presenta POSTAL PRIME, un nuevo protocolo que emplea la misma señalización de control y que elimina la distinción entre señalización bajo demanda y proactiva, y en lugar de eso emplea regiones de interés 18. Las regiones de interés son presentadas como respuesta al problema de escalabilidad que poseen de manera inherente las MANETs 5. (2) La introducción de un nuevo método denominado multilateración probabilística que es usado para estimar la posición de un nodo. Esta técnica se basa en la posición conocida de tres o más referencias y en estimados de distancias a dichas referencias 29, 28. La principal virtud del método de multilateración probabilística es que reduce de manera significativa el impacto negativo producto de las debilidades que posee el método tradicional de trilateración empleado para estimar posición de un nodo. (3) La implementación en NS2 de la versión 2D de ODMRP+Amorphous, que son de los algoritmos de enrutamiento y posicionamiento más representativos del estado del arte en el contexto de MANETs. Esta implementación puede ser descargada de la página http://sourceforge.net/projects/posalgorithms/.
El resto del presente documento está organizado de la siguiente manera. En la Sección 2 se presenta el análisis de una muestra que consideramos representativa del trabajo que se ha desarrollado en las áreas de enrutamiento y posicionamiento en MANETs. El objetivo principal de dicho análisis es resaltar las componentes originales del trabajo propuesto. La Sección 3 presenta el protocolo POSTAL PRIME, el cual implementa el marco de trabajo para enrutamiento y posicionamiento integrados. En la Sección 4 se introduce el método de multilateración probabílistica y se presenta un análisis de sus principales propiedades. La Sección 5 describe los resultados de los experimentos de simulación empleados para comparar POSTAL PRIME con dos de los protocolos de enrutamiento y posicionamiento más relevantes para MANETs. Nuestra comparación aborda el desempeño de los protocolos combinando tráfico multicast y de localización.
2. Trabajo relacionado
A la fecha se han propuesto un gran número de protocolos de posicionamiento y de enrutamiento para MANETs, sin embargo, y debido a las limitaciones de espacio, aquí se presenta sólo una muestra que consideramos representativa de ellos. El objetivo de este estudio es resaltar (i) la necesidad de desarrollar algoritmos capaces de soportar más de un tipo de tráfico. (ii) La diseminación de tráfico de control no está relacionada con el interés que los nodos tienen en los destinos, lo que provoca que se desperdicien recursos como ancho de banda, espacio en colas de datos y energía de las baterías. Lo anterior se debe a que las técnicas tradicionales de establecimiento de rutas obligan a nodos, que a pesar de que no participan en el soporte del flujo de datos, a consumir recursos de ancho banda, memoria, procesamiento y batería. (iii) Se han desarrollado un número importante de protocolos optimizados para las características propias de la movilidad, sin embargo, cuando estas suposiciones se invalidan, dichos protocolos tienden a entregar un desempeño pobre. (iv) A pesar de que comparten muchas de sus funciones básicas, los algoritmos de posicionamiento para MANETs se han desarrollado para trabajar de forma independiente de los algoritmos de enrutamiento.
2.1. Enrutamiento multicast
En el enrutamiento basado en mallas los protocolos incluyen enlaces redundantes para conectar fuentes y destinos con el propósito de hacer a las estructuras de enrutamiento más robustas ante los continuos cambios topológicos. Los protocolos de enrutamiento multicast más representativos son: ODMRP 15, Hydra 20, CAMP 9, PUMA 38 y PRIME 19, 10. ODMRP es un protocolo de tipo inciado por transmisor donde las estructuras de enrutamiento se establecen bajo demanda cuando una fuente desea enviar datos a algún grupo multicast. Cada fuente inunda periódicamente paquetes de control conocidos como “solicitudes de unión” (join request), los cuales son diseminados en toda la red estableciendo y actualizando la información de membresía a la malla multicast. Los nodos que pertenecen a esta malla multicast son los encargados de retransmitir los paquetes generados por las fuentes hasta los receptores. La principal desventaja de ODMRP es que la red completa es inundada periódicamente por cada fuente activa de cada grupo multicast. Se han presentado varias extensiones a ODMRP como DCMP 8, NSMP 14 y MMARP 32 que reducen la sobrecarga de control, desafortunadamente, como ODMRP, sus extensiones inundan la red por cada fuente activa de cada grupo multicast. El primer protocolo multicast basado en mallas e iniciado por el transmisor que únicamente requiere que se inunde la red por cada grupo multicast activo es Hydra 20. Hydra es uno de los primeros protocolos en usar el concepto de región de interés para contener la diseminación de paquetes de control a las regiones de la red donde son realmente útiles. CAMP 9 es un protocolo del tipo iniciado por receptor que evita la necesidad de inundar la red por cada fuente activa por medio de la pre-designación de uno o más nodos como nodo núcleo de algún grupo multicast. Los receptores se unen a los grupos multicast por medio de solicitudes que son enviadas de forma unicast al núcleo del grupo deseado. PUMA 38 es otro protocolo basado en núcleos que también usa el enfoque iniciado por el receptor. A diferencia de CAMP, PUMA emplea un protocolo de elección distribuida para elegir dinámicamente a los núcleos de cada grupo multicast y no requiere la ejecución concurrente de un protocolo de enrutamiento unicast. La principal deficiencia de PUMA es que los receptores inundan la red completa con anuncios de grupo aún y cuando no existan fuentes activas para dichos grupos. DPUMA 21 es una variante de PUMA que calcula conjuntos dominantes de la malla multicast para reducir el número de retransmisiones de datos redundantes y mejorar así la escalabilidad del protocolo. PRIME 19, 10 utiliza enrutamiento basado en interés para soportar tanto tráfico unicast como multicast. En el enrutamiento basado en interés, se establecen regiones de interés que están formadas por fuentes y destinos, así como aquellos nodos que pueden fungir como retransmisores para los flujos de datos. El tráfico de control y datos es confinado en estas regiones por lo que se aumenta la reutilización espacial del ancho de banda, memoria y energía. Finalmente, en 17, se presenta un protocolo de enrutamiento geocast y multicast integrado basado en interés.
2.2. Posicionamiento
En esta sección se describen de manera resumida algunas de las propuestas más relevantes en el área de los algoritmos de posicionamiento libres de distancias. En general, se asume que sólo una fracción de los nodos conocen de manera previa sus posiciones, ya sea a través de una configuración manual o haciendo uso de receptores GPS. Este tipo especial de nodos son conocidos como “referencias, anclas o balizas1” y sus posiciones son utilizadas como puntos de referencia para ayudar al resto de los nodos a estimar sus posiciones. DV-Hop es un algoritmo de localización que adopta el mecanismo de vector de distancias 27 para diseminar información de localización. Por lo tanto, cada referencia inunda periódicamente la red con información de control. En DV-Hop, cada nodo determina su distancia más corta en saltos hacia cada referencia. Posteriormente, calcula la distancia euclidiana entre él y cada referencia multiplicando su distancia en saltos por el promedio de longitud de un salto. El promedio de longitud de un salto se calcula usando las distancias euclidianas entre referencias así como la distancia en saltos entre ellas. Por último, los nodos estiman sus posiciones utilizando el método de trilateración. Amorphous 24, es similar a DV-Hop en cuanto a que las referencias diseminan periódicamente información topológica y de localización hacia toda la red, pero a diferencia de DV-Hop, en Amorphous se asume que la densidad de nodos es constante y conocida, lo que le permite estimar fuera de línea la longitud promedio de un salto. Amorphous utiliza en su última etapa triangulación para estimar la posición de sus nodos. Una de las alternativas más sencillas dentro de los algoritmos libres de distancias es el algoritmo Centroid . En este esquema, los nodos reciben mensajes de las referencias ubicadas dentro de su rango de transmisión, es decir, las que se encuentran a un solo salto de distancia, y simplemente estiman sus coordenadas como el centroide del polígono formado por las referencias. Por su parte, APIT (Approximate Point-In Triangulation) 12 utiliza una prueba basada en área llamada PIT (Point-In Triangulation) que consiste en repetir diferentes combinaciones de tres referencias que se encuentran dentro del rango de transmisión de los nodos. Ésto permite a cada nodo determinar si se encuentra o no dentro de la región triangular generada por cada grupo de tres referencias. Después de la prueba, APIT utiliza un algoritmo de escaneo de malla (grid-scan algorithm) 13 para encontrar la región donde se intersecten el mayor número de triángulos. Finalmente, APIT estima que la posición del nodo se encuentra en el centroide de dicha región.
3. POSTAL PRIME
En esta sección se decriben de manera general los componentes y la funcionalidad de POSTAL PRIME, protocolo que se propone como instancia del marco de trabajo para enrutamiento y posicionamiento integrados.
3.1. Gestión de anuncios de malla
POSTAL PRIME establece y mantiene estructuras de enrutamiento y posicionamiento, una estructura de enrutamiento para cada grupo multicast activo, es decir, para cada grupo con fuentes y receptores activos, y una estructura de posicionamiento para cada referencia activa con al menos un nodo que desea estimar su posición (nodo demanda). Cada fuente o nodo demanda que se activa envía una solicitud de malla (Mesh Request, MR) que se disemina hasta un horizonte con un umbral predefinido. La estructura de un MR se puede ver en la tupla definida en (1).
donde type establece el tipo de mensaje, horizon es un
umbral definido para determinar el límite de la diseminacion de un
MR hasta un horizonte predefinido,
persistent es una bandera que indica persistencia de
interés, idS es el identificador de la fuente o del
nodo demanda que hace la solicitud,
En el caso de enrutamiento, la primera solicitud adjunta un paquete de datos. Si el interés expresado por la fuente se extiende a más de un paquete de datos, el destino de un MR establece y mantiene una malla de enrutamiento que abarca al menos una fuente activa, así como un conjunto de nodos en el caso de enrutamiento multicast. En lo que respecta a posicionamiento, una referencia activa emplea el primer MR enviado por un nodo demanda para establecer una malla de posicionamiento que contiene la referencia activa y al menos un nodo demanda.
POSTAL PRIME emplea anuncios de malla (Mesh Announcement, MA) para mantener activas tanto las mallas de enrutamiento multicast como las mallas de posicionamiento. En un flujo multicast, los receptores del grupo ejecutan un algoritmo distribuido que emplea anuncios MA para elegir el núcleo del grupo, que será el receptor que continuará generando MAs para el grupo multicast. Esta elección de núcleo no es necesaria para posicionamiento. La estructura de un MA se define en (2).
donde id*B es el identificador de un nodo transmisor
Un núcleo activo o referencia activa envían anuncios MA con números de secuencia que crecen monótonamente durante el tiempo en el que hay al menos una fuente activa interesada en un destino o un nodo demanda activo interesado en la información de localización generada por alguna referencia. Cuando no se detectan fuentes activas o nodos demanda activos, el núcleo o la referencia detiene la generación de MAs después de un tiempo finito, lo que provoca la eliminación de la información de la malla correspondiente. En posicionamiento, si el interés de un nodo demanda se mantiene, éste seguirá generando MAs que servirán para notificar el interés de mantener activa una referencia y por ende para mantener activa la malla de posicionamiento que esta genera. El estado blando o soft state de enrutamiento y posicionamiento es el tiempo de espera antes de ser eliminadas las estructuras. En las estructuras de enrutamiento el estado blando es de cuatro MA consecutivos en caso de no recibir MAs o paquetes de datos. En posicionamiento, las estructuras son eliminadas en caso de no recibir MAs en cuatro períodos MA consecutivos.
3.2. Regiones de interés
Para limitar el tráfico de control y de datos a aquellas partes de la red que necesitan la información, se define una región de interés para cada malla de enrutamiento y/o posicionamiento establecida. En enrutamiento, la región de interés de un flujo es un componente conexo que incluye todos las fuentes, los receptores y los nodos retransmisores necesarios para conectarlos. En posicionamiento, la región de interés es un componente conexo que contiene la referencia activa, los nodos demanda activos interesados en ella y los nodos retransmisores necesarios que los conectan.
En enrutamiento, las regiones de interés son establecidas con el soporte de los paquetes de datos que fluyen desde las fuentes hacia los destinos multicast. En lo que respecta a posicionamiento, las regiones de interés son establecidas con el soporte de mensajes MR que fluyen desde los nodos demanda hacia las referencias.
El Algoritmo 1 es empleado para decidir siun nodo tiene que retransmitir un MA de un destino multicast D. El Algoritmo 2 es empleado para decidir si un nodo tiene que retransmitir un MA hacia un nodo demanda. Para un destino multicast, el algoritmo devuelve true siel nodo es un nodo receptor (rc), una fuente (sc), un nodo miembro de la malla (mm) o si el nodo forma parte del camino (pn), esto es, si se ha retransmitido previamente un paquete de datos procedente de cualquier fuente al destino D durante MA períodos (en segundos). En caso contrario, verifica el valor r mod R y regresa true si es igual a 0, con cualquier otro valor regresa false. El valor r mod R es empleado para reducir la frecuencia con la que un nodo transmite MAs al exterior de la región de interés. El valor inicial de r es 0. Para una referencia, el algoritmo devuelve true si el nodo es un nodo demanda (dn) o si es un nodo camino (pn), esto es, si se ha retransmitido previamente un mensaje MR procedente de cualquier nodo demanda hacia una referencia D durante MA períodos (en segundos), y false en caso contrario.

La Figura 1 presenta un ejemplo de una región de interés de un flujo multicast y de una referencia. Respectó a la región de interés de un flujo multicast, los nodos etiquetados p, p’ y p’’ forman parte de la región de interés debido a que ellos son parte de las rutas más cortas entre la fuente s y el núcleo d. En posicionamiento, los nodos etiquetados r, r’ y r’’ forman parte de la región de interés porque se encuentran a una distancia en saltos menor o igual que n hacia la referencia b. Los nodos x y t ayudan a mantener la región conectada en caso de que el nodo n se mueva y quede fuera de rango de la referencia y de r.

Es importante destacar que POSTAL PRIME integra información de enrutamiento y posicionamiento en la misma señalización de control, es decir, trabaja de manera oportunista de tal manera que mientras las referencias diseminan información de localización, todos los nodos que forman la estructura de posicionamiento mantienen rutas hacia las referencias. De igual manera, establece mallas y regiones de interés en los procesos de enrutamiento y posicionamiento, ambos procesos bajo demanda. Estas características son únicas de POSTAL PRIME, y en conjunto hacen que su señalización de control sea más eficiente.
3.3. Estimación de posición
El proceso de estimación de posición en POSTAL PRIME se divide en dos fases. La primera fase consiste en determinar las distancias euclidianas existentes entre un nodo demanda y cada referencia dentro de un horizonte predefinido. El proceso de estimación de posición es iniciado por el nodo demanda. Las distancias euclidianas son calculadas salto a salto una vez que una referencia se activa e inicia el proceso de diseminación de información de localización. Para calcular la distancia euclidiana entre un nodo A y nodo B, se determina el promedio del uno-vecindario de ambos nodos y posteriormente se traduce dicho promedio a la distancia euclidiana empleando la fórmula utilizada en para determinar la longitud de un salto. Cuando un nodo demanda recibe información de localización de al menos tres referencias, selecciona las tres distancias euclidianas más cortas hacia ellas y posteriormente emplea el método multilateración probabilística para estimar su posición. El método multilateración probabilística se describe a detalle en la siguiente sección.
4. Multilateración probabilística: un nuevo método de estimación de posición
En los últimos años, la localización se ha convertido en una de las áreas de investigación más activas debido a su importancia en aplicaciones tanto militares como civiles. Evidencia de lo anterior, es que en 2015, DARPA le da al desarrollo de nuevas tecnologías de posicionamiento importancia de seguridad nacional 31. En el contexto de las MANETs, el problema de localización radica en conocer la posición de nodos móviles 4 en base a la posición de un conjunto de referencias que también pueden ser móviles. En general, existen diversos artículos seminales que presentan propuestas de solución al problema de localización 25, 24, 6, 12, 11. La literatura hace referencia a DV-Hop como el algoritmo estándar en la categoría de algoritmos de posicionamiento libres de distancias. El algoritmo DV-Hop emplea el conteo de saltos 22, 23, 16 como técnica de medición de distancia entre nodos y el método de trilateración 23, 16, 37 como técnica para estimar la posición de sus nodos. El método tradicional de trilateración es un método empleado para determinar la posición de un punto o nodo. Para ello se requiere de información de localización de al menos tres referencias, así como también conocer las distancias exactas hacia ellas. Sin embargo, en el contexto de las MANETs, trilateración ha resultado ser ineficiente. Esto se debe principalmente a la naturaleza dinámica que poseen este tipo de redes que provoca que los métodos empleados para estimar las distancias entre nodos reporten distancias imprecisas y como consecuencia degraden la calidad de estimación de posición que ofrece trilateración. Aunado a esto, en redes con un alto nivel de movilidad como son las MANETs, no es posible garantizar la no-colinealidad entre referencias, precondición que establece el método de trilateración para estimar la posición de un nodo. Los aspectos antes mencionados generan en trilateración: incertidumbre, inconsistencia y ambigüedad. En relación a esto, existen diversos trabajos seminales 39, 30, 34, 2 enfocados a mitigar las deficiencias de trilateración, no obstante, éstos no han logrado tener mayor impacto. Por tal motivo, presentamos como principal contribución de nuestro trabajo de investigación de tesis doctoral, un método que denominamos multilateración probabilística 29, y posteriormente en 28 un análisis experimental más extenso y detallado de éste. Este es un método novedoso orientado a estimar la posición de un nodo, basada en la posición de tres o más referencias y las distancias estimadas de manera imprecisa hacia ellas. El objetivo de este método es resolver las deficiencias del método de trilateración señaladas previamente.
4.1. Trilateración y sus deficiencias
Trilateración es un método empleado para determinar la posición de un nodo 23, 16, 37. Para ello se requiere de información de localización de al menos tres referencias, así como también conocer las distancias exactas hacia ellas. Desafortunadamente, en situaciones donde las estimaciones de distancias no son fiables, como sucede generalmente en el contexto de las MANETs que se caracterizan por generar topologías no isotrópicas (ver Figura 2(d)), trilateración sufre de incertidumbre (ver Figura 2(a)) cuando tres circunferencias no se intersecan en un único punto, inconsistencia (ver Figura 2(b)) en el que los diferentes grupos de tres referencias producen resultados distintos y ambigüedad (ver Figura 2(c)) donde el sistema de ecuaciones tiene dos soluciones espejo 39. Por otra parte, incluso con estimaciones perfectas de distancias, trilateración también puede fallar si el nodo es colineal con cualquier grupo de dos referencias de las tres utilizadas como referencias.

4.2. Multilateración probabilística
Multilateración probabilística 29, 28 es un método novedoso orientado a estimar la posición de un nodo, basada en la posición de tres o más referencias y las distancias estimadas hacia ellas. El objetivo del método es el de resolver las deficiencias del método de trilateración como la incertidumbre, no consistencia y ambigüedad 39, que surgen cuando la información de la ubicación de las referencias o las estimaciones de las distancias hacia ellas no son exactas.
El método multilateración probabilística define para cada referencia β una función de densidad de probabilidad Pβ(x, y) que asigna a cada punto en el plano (o espacio) una probabilidad de encontrar un nodo. Dado que las posiciones reales de las referencias y los nodos son independientes, se puede suponer que la probabilidad de encontrar un nodo en un punto (x, y) dado, definido por la función Pi(x, y), también es independiente de la probabilidad definida por otra función Pj(x, y) para el mismo punto. Por lo tanto, como se muestra en la Ecuación 3, la probabilidad de encontrar un nodo en un punto (x, y), dada la información proporcionada por un conjunto B de n referencias, se puede calcular como el producto de las probabilidades definidas por las n funciones de densidad de probabilidad:
La posición estimada por el método multilateración probabilística es el punto (x, y) donde PB(x, y) tiene su máximo.
4.2.1 Estimación de posición en 2D
La función de densidad de probabilidad definida en la Ecuación 4 que se basa en una función Gaussiana con parámetros μ y σ. En la Ecuación 4, xβ y yβ son las coordenadas de la posición de la referencia β, μβ es la distancia estimada a la referencia β, σβ es proporcional al error de estimación de la distancia hacia la referencia β y Nβ es una constante de normalización. Como se puede ver en la Ecuación 4, la probabilidad de encontrar un nodo en un punto dado en el plano es simplemente una función de su distancia a las referencias. La Figura 3(a) muestra una representación gráfica de esta función de densidad de probabilidad donde se puede observar que se tiene un número infinito de máximos situados sobre la circunferencia con centro en (xβ, yβ) y radio μβ:

Fig. 3 Multilateración probabilística usando funciones Gaussianas. (a) Función de densidad de probabilidad definida para una referencia β. (b) Superposición de tres funciones de probabilidad. Cada una definida por una referencia diferente. (c) Función de densidad de probabilidad de localización de un nodo dadas tres referencias. (d) Superposition de cuatro funciones de densidad de probabilidad
Con información de un conjunto B de tres o más referencias, se puede sustituir la Ecuación 4 en la Ecuación 3 para obtener la función de densidad de probabilidad (pdf) definida en la Ecuación 5. La Figura 3 (b) muestra una gráfica de tres pdfs superpuestas definida por la información de tres referencias, mientras que la Figura 3 (c) muestra una gráfica del producto de tres pdfs que tiene un único máximo que será la posición calculada por el método multilateración probabilística:
Con el fin de encontrar el máximo de la Ecuación 5, se calculan las soluciones de las derivadas parciales (Ecuaciones 6 and 7) de la Ecuación 5. Sin embargo, ya que las Ecuaciones 6 y 7 son igual a cero sólo si la última sumatoria es igual a cero, sólo se tiene que resolver simultáneamente las Ecuaciones 12 y 13. Esto último representa lo mismo que la solución de la Ecuación 10 donde las Ecuaciones 12 y 13 se elevan al cuadrado y luego se suman:
Por último se puede emplear el método de Newton 35, con el centro de gravedad de las posiciones de las referencias como punto de partida para encontrar la raíz de la Ecuación 10. Es importante señalar que el método de Newton converge cuadráticamente si la derivada de la Ecuación 10 es continua y no cero en el vecindario de la raíz.
4.2.2. Estimación de posición en 3D
El método multilateración probabilística puede extenderse fácilmente para calcular la posición de un nodo en un espacio 3D en base a la información proporcionada por un conjunto B de cuatro o más referencias. En tres dimensiones, la función de densidad de probabilidad basada en funciones Gaussianas, definida por un conjunto de n referencias está dada por la Ecuación 11:
A partir de la Ecuación 11 se procede de forma análoga al caso 2D y se calcula las derivadas parciales con respecto a x, y y z. Entonces, las tres ecuaciones 12, 13 y14 se tienen que resolver simultáneamente para encontrar los puntos que maximizan la Ecuación 11. Al igual que en 2D, este problema es equivalente a encontrar las raíces de la Ecuación 15 que también se pueden obtener usando el método de Newton 35:
4.2.3. Análisis de sensibilidad de colinealidad/coplanaridad
Este experimento consiste en un simple análisis de sensibilidad que tiene como objetivo conocer los efectos producidos al aplicar diversos niveles de colinealidad/coplanaridad a las referencias o balizas que intervienen en el proceso de estimación de posición tanto de trilateración como de multilateración probabilística. En relación al método de trilateración, para este análisis empleamos básicamente la solución del Sistema de Ecuaciones (16) por medio de (17), donde

El escenario 2D consistió en fijar la posición de dos referencias y la del nodo que está intentando estimar su posición. Como se muestra en la Figura 4(a), la posición de la tercer referencia requerida para estimar la posición del nodo se va reubicando hasta alcanzar colinealidad con las otras dos referencias.
La Figura 4(b) grafica los errores de localización incurridos por los dos métodos. En la Figura se puede observar que el método de multilateración probabilística es mucho menos sensible a la colinealidad que el método de trilateración cuyo error de localización incrementó rápidamente a medida que la tercer referencia se posicionó colinealmente con las otras dos referencias y los denominadores en (17) se aproximaron a cero.
En el caso del escenario 3D, se fijó la posición de tres referencias y la del nodo que está tratando de estimar su posición. Entonces, como se muestra en la Figura 5(a), la posición de la cuarta referencia requerida para estimar la posición del nodo se va reubicando hasta alcanzar coplanaridad con las otras tres referencias. En la Figura 5(b) se muestra que los resultados son análogos a los del escenario 2D.

4.3. Ventajas de multilateración probabilística sobre trilateración
El método multilateración probabilística tiene cuatro ventajas principales sobre trilateración, el método tradicional empleado para estimar posición. 1) Multilateración probabilística elimina el problema de inconsistencia debido a que puede ser utilizado, al mismo tiempo, un número arbitrario de referencias para estimar la posición de un nodo. 2) Es más resistente a la colinealidad (coplanaridad) porque la función de densidad de probabilidad propuesta no tiene máximos locales fuera del polígono (poliedro) del área mínima (volumen) que contiene las circunferencias (esferas) definidas por las funciones de densidad de probabilidad de las referencias individuales, y por lo tanto, el método de multilateración probabilística no proporciona de manera arbitraria malas estimaciones como es el caso del método de trilateración. 3) El método de multilateración probabilística tiene buen desempeño, incluso si las circunferencias (esferas) defininas por las referencias no se intersecan o intersecan en muchos puntos. 4) El método de multilateración probabilística se desempeña igual que trilateración con las estimaciones de distancias perfectas sin costo computacional extra.
5. Resultados experimentales
En esta sección se presentan los resultados del estudio comparativo basado en simulaciones entre las dos primeras versiones distribuidas de los protocolos POSTAL PRIME y ODMRP+Amorphous. Nuestra comparación aborda el desempeño de los protocolos combinando tráfico multicast y de localización. Los experimentos fueron ejecutados utilizando a IEEE 802.11 DCF 1 como protocolo de acceso al medio y a 802.11b como modelo de capa física. Las métricas usadas para evaluar el desempeño de los algoritmos son: error de localización, cobertura, sobrecarga, porcentaje de paquetes entregados y retardo extremo a extremo. El error de localización se define como la distancia euclidiana entre la posición real del nodo y la posición estimada por los algoritmos. Todas las gráficas presentan esta distancia en términos del radio de transmisión. La cobertura se define como la proporción de nodos que consiguen estimar su posición. La sobrecarga mide el número total promedio de paquetes transmitidos por nodo, incluyendo referencias. Esta métrica cuantifica la cantidad de recursos (ancho de banda, memoria, ciclos de CPU) empleados tanto para enrutar como para estimar la posición de los nodos. El porcentaje de paquetes entregados es una de las métricas más importantes en la evaluación de un protocolo de enrutamiento, ya que mide la efectividad del algoritmo para establecer y mantener rutas que conecten a la fuente con sus receptores. El porcentaje de paquetes entregados se calcula empleando la Ecuación 18. El retardo extremo a extremo es el promedio de tiempo que les toma a los paquetes de datos desplazarse desde el nodo fuente hasta llegar a sus destinos. Esta métrica está relacionada tanto con la longitud de los caminos que conectan a las fuentes con los receptores, como con los niveles de contención del medio inalámbrico y de congestión de las colas de datos. El retardo extremo a extremo se obtiene mediante la Ecuación 19:
donde ns es el número total de paquetes enviados, nr(i) es el número de nodos que reciben el paquete i, nm(i) es el número de nodos que son miembros del grupo multicast D al momento que el paquete i con destino D es enviado:
donde nr es el número total de paquetes recibidos, ts(i) es el tiempo en el que el paquete i fue enviado, y tr(i) es el tiempo en el que el paquete i fue recibido por alguno de los nodos mimbros del grupo multicast D.
Se empleó la versión 2.34 del simulador de eventos discretos NS-2 36, que provee simulación realista de la capa física y una versión bien refinada de IEEE 802.11 DCF. Cada simulación fue ejecutada utilizando 10 semillas diferentes. Todos los protocolos utilizaron un período de tres segundos para actualizar su información de localización. Se empleó Random Waypoint como modelo de movilidad. Las velocidades de los nodos varían aleatoriamente de 1 a 10 m/s con un tiempo de pausa de 10 segundos.
Los nodos fuentes de tráfico son designados al azar, al igual que los miembros del grupo multicast. Se hace uso de la aplicación CBR (Constant Bit Rate) para generar los datos a transmitir. CBR permite establecer la frecuencia de transmisión, el destino y el tamaño de los paquetes, y no tiene ninguna aplicación en particular en los nodos más que generar y recibir paquetes de datos. En todos los experimentos reportados en este trabajo, cada fuente de datos transmite un máximo de 1000 paquetes a una frecuencia de 10 paquetes por segundo. Cada paquete generado tiene un tamaño de 256 bytes. El formato del identificador del destino del paquete CBR es simplemente la dirección del grupo multicast deseado. La Tabla 1 resume de manera general los parámetros empleados en los experimentos.
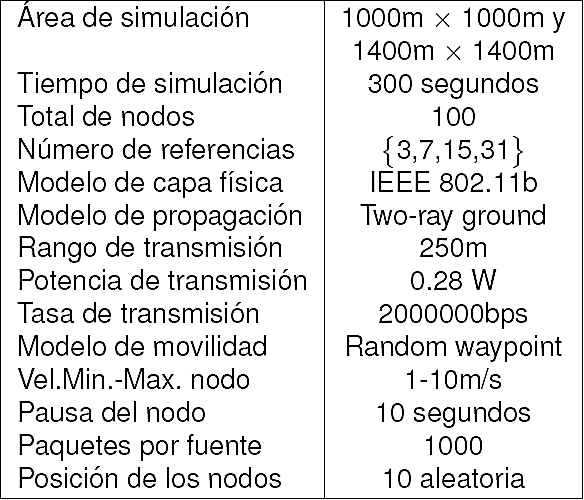
En este trabajo se reportan resultados de cuatro experimentos. Escenario 1 (1 fuente activa), Escenario 2 (3 fuentes activas) y Escenario 3 (7 fuentes activas) y Escenario 4 (11 fuentes activas). Los cuatro escenarios emplearon un sólo grupo multicast de 20 nodos, es decir, 1, 3, 7 y 11 fuentes activas que envían datos hacia un único grupo multicast. En los cuatro escenarios tanto las referencias como los nodos demanda son móviles. Además se evaluaron los protocolos sobre las áreas de simulación de 1000m x 1000m y 1400m x 1400m. Las imágenes de la Figura 6 muestra los resultados de nuestros experimentos graficados con la misma escala por métrica evaluada. Mientras tanto, en la Figura 7 se nuestran los mismos resultados pero cada imagen es ampliada y configurada con una escala diferente.

Fig. 6 Efecto de movilidad, numero de referencias y numero de fuentes cuando se utiliza un modelo de propagación 2D

Fig. 7 Efecto de movilidad, numero de referencias y numero de fuentes cuando se utiliza un modelo de propagación 2D -versión de la Figura 6 con imágenes ampliadas-
Las Figuras 6(a), 6(b), 6(c) y 6(d) muestran el error de localización alcanzado por los protocolos a medida que se aumenta el número de referencias disponibles. El protocolo POSTAL PRIME superó constantemente el desempeño de ODMRP+Amorphous por incurrir en errores de localización, en general, cerca de la mitad de la magnitud reportada por éste último. Este fenómeno ocurrió en todos los escenarios y en ambas áreas de simulación. En las Figuras 6(a), 6(b), 6(c) y 6(d) también se puede observar, que a medida que se aumenta el número de referencias, el error de localización reportado por POSTAL PRIME y ODMRP+Amorphous decrementa, éste último únicamente en los escenarios 3 y 4 cuando se incrementa el número de fuentes activas. Estos resultados se esperaban debido a que uno de los principales componentes del error total de estimación, para ambos protocolos, es el error incurrido cuando se calcula el promedio de longitud de un salto, que es muy sensible a la distancia en saltos de los nodos a las referencias. Como el número de referencias incrementa, la probabilidad de encontrar referencias cercanas también incrementa y por lo tanto el error de estimación disminuye. En los resultados también se puede apreciar cómo la movilidad tiene un impacto negativo sobre el error de localización y dicho impacto es mayor cuando la densidad de nodos disminuye. Esto es debido a que los protocolos dependen en mayor medida de la información topológica y la movilidad tiende a reducir la precisión de la información disponible. Sin embargo, aún cuando la movilidad reduce la precisión de dicha información, ésta no compromete la disponibilidad del servicio, esto puede apreciarse en las Figuras 6(m), 6(n), 6(o) y 6(p).
También, en las Figuras 6(a), 6(b), 6(c) y 6(d) se puede observar que POSTAL PRIME mejora de rendimiento de manera considerable debido a que emplea el método de multilateración probabilística propuesto en nuestro trabajo de tesis doctoral para estimar posición, mientras que ODMRP+Amorphous emplea, para estos experimentos, el método tradicional de trilateración para estimar la posición de sus nodos. Estos resultados confirman la hipótesis de que el método probabilístico reduce eficazmente el impacto de la incertidumbre, inconsistencia y ambigüedad, discutido en la Sección 4, que afectan negativamente el rendimiento del método de trilateración tradicional.
En las Figuras 6(e), 6(f), 6(g) y 6(h) se observa que el número de paquetes entregados por POSTAL PRIME, en promedio, es igual al de ODMRP+Amorphous. De igual forma, conforme fue incrementado el número de fuentes activas, en ambas áreas de simulación, el número de paquetes entregados disminuyó. Asimismo, al aumentar el número de fuentes activas se puede observar en las Figuras 6(a), 6(b), 6(c) y 6(d) que el error de localización fue incrementando. Estos comportamientos se deben a las colisiones y la congestión de las colas de datos que impiden información topológica precisa, lo cual impacta de manera negativa sobre el error de localización.
Por otro lado, en las Figuras 6(q), 6(r), 6(s) y 6(t) se observa que el retardo extremo a extremo en POSTAL PRIME, en promedio, es menor o igual al reportado por ODMRP+Amorphous en experimentos sobre un área de simulación de 1000m x 1000m. Sin embargo, en los experimentos en el área de simulación de 1400m x 1400m, POSTAL PRIME, en promedio, tuvo mejor desempeño que ODMRP+Amorphous en los Escenarios 2, 3 y 4. Esto se atribuye a que la congestión y las colisiones que se generan sobre un área de simulación de 1000m x 1000m son mayores, porque la densidad de nodos es mayor, a las generadas sobre un área de simulación de 1400m x 1400m.
Finalmente, las Figuras 6(i), 6(j), 6(k) y 6(l) muestran la sobrecarga inducida por los diferentes protocolos. Como era de esperarse, la sobrecarga aumentó a medida que el número de referencias incrementó debido a que las referencias diseminaban información de localización periódicamente. Asimismo se puede observar que la sobrecarga aumentó conforme incrementó el número de fuentes activas.
Es importante señalar que la sobrecarga tiene un impacto negativo sobre el error de localización, la entrega de paquetes y el retardo extremo a extremo reportados por los algoritmos. Esto es debido a que más paquetes se pierden a causa de las colisiones y congestión de las colas de datos. Esto último provoca errores al momento de calcular las distancias en saltos hacia las referencias, en posicionamiento.
En términos generales, POSTAL PRIME incurre en una sobrecarga menor en los experimentos realizados en ambas áreas de simulación, y estos resultados son consistentes aún con el incremento en el número de referencias.
6. Conclusiones
En este trabajo se presentó POSTAL PRIME, un protocolo que redefine la forma en la que se integra enrutamiento y posicionamiento en una misma señalización de control mediante el uso de mallas y regiones de interés. POSTAL PRIME establece mallas (componentes conexos de una MANET) que se activan y se desactivan por la presencia o ausencia de tráfico de datos y de nodos demanda. Las regiones de interés se emplean para confinar la mayor parte de la difusión de paquetes de control e información de localización únicamente a los nodos que actualmente necesitan la información. Esta característica tiene un impacto positivo en la escalabilidad del protocolo debido a que favorece la reutilización espacial del ancho de banda, de la energía en las baterías, del espacio en las colas de datos y de ciclos de CPU. Los resultados que se reportan después de una extensa serie de experimentos muestran que POSTAL PRIME alcanza un porcentaje de entrega de paquetes al menos igual que ODMRP+Amorphous. Del mismo modo, POSTAL PRIME induce menos sobrecarga de control de comunicación y alcanza retardos menores, generalmente, que su contraparte. Por otra lado, POSTAL PRIME es el único protocolo (según nuestro conocimiento) que combina dos servicios diferentes en un sólo protocolo, pero que además proporciona un desempeño adecuado en redes con tráfico combinado de enrutamiento multicast y localización.

