











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
En México, durante el año 2019, el 75.1% de la población con edad de seis años o más contaban con un teléfono celular inteligente, el cual incluía al menos una cámara digital integrada y tenía la capacidad de capturar y compartir archivos multimedia. De acuerdo con datos reportados en 2019 por el Instituto Nacional de Geografía y Estadística (INEGI), del total de usuarios de teléfonos celulares inteligentes, 45.5 millones instalaron aplicaciones; y de estos, el 89.5% instalaron mensajería instantánea, el 81.2% instalaron herramientas para acceso a redes sociales y el 71.9% instalaron aplicaciones de contenidos de audio y video con capacidad de compartir archivos multimedia (INEGI, 2019).
Un teléfono celular inteligente es un dispositivo personal que, a partir de las prestaciones que tiene disponibles, se considera el principal generador de imágenes digitales. En muchos casos, estas imágenes podrían usarse como material probatorio en un proceso legal, ya sea de carácter penal, civil, médico o administrativo. En ese sentido, podría requerirse relacionar a una imagen digital con su dispositivo de captura y, en consecuencia, establecer una relación de dicho dispositivo con una persona, típicamente el propietario. En México, bajo el marco legal actual, en el que es posible presentar imágenes digitales como material probatorio, la relación imagen-dispositivo y dispositivo-sujeto puede ser crucial; por ello, las acciones de análisis forense multimedia pueden adquirir relevancia. La identificación de los dispositivos de captura se hace comúnmente a través de los rasgos (metadatos y señal PRNU) que se encuentran en las imágenes analizadas. Aunque no son determinantes en un análisis forense, los metadatos constituyen información relevante que describe de manera general el contenido principal de un documento digital; en este caso, el documento es una imagen digital en formato JPEG. De no ser modificados maliciosamente o dañados sin intensión, los metadatos resultan de gran ayuda en la documentación de un caso (Sandoval et al., 2015).
Por otro lado, en acciones de análisis forense de imágenes digitales, la señal PRNU (Photo Response Non-Uniformity) es una de las más utilizadas. La señal PRNU es una de varias señales intrínsecas que un dispositivo de captura imprime en una imagen digital cuando la construye; por ello, es considerada un elemento útil en la identificación unívoca del dispositivo de captura de una imagen digital. De acuerdo con lo expresado en Fridrich (2009), son cinco las principales propiedades de la señal PRNU:
-
Dimensionalidad. Es de naturaleza aleatoria y de tamaño finito, con información de las características del sensor del dispositivo de captura.
Universalidad. Todos los sensores de imágenes la generan: Por lo tanto, se puede extraer de imágenes digitales generadas por cualquier dispositivo de captura.
Generalidad. Está presente en cada imagen digital independientemente del mecanismo óptico o configuración de la cámara, o del contenido de la escena, con la probable excepción de las imágenes que son completamente oscuras.
Estabilidad. Para un dispositivo de captura, y bajo condiciones de uso adecuado, esta señal no cambia en el tiempo y se mantiene para una amplia gama de condiciones ambientales (temperatura, humedad, etc.).
Robustez. Sobrevive a procesamientos típicos como la compresión con pérdidas, el filtrado, la corrección gamma entre otros.
La señal PRNU es una componente del ruido del patrón del sensor (Sensor Pattern Noise [SPN]), el cual está asociado a imperfecciones en las obleas de silicio con las que se fabrica el sensor del dispositivo de captura y causa la variación de la sensibilidad de los píxeles de la imagen. Por estas cinco propiedades, la señal PRNU puede usarse para definir la huella digital de los dispositivos de captura contenida en las imágenes digitales. Cabe destacar que la señal PRNU es el principal contribuyente del SPN.
Cuando se genera una imagen digital JPG, en ella se imprimen características intrínsecas del dispositivo de captura. Cuando estas características llegan a cumplir con las propiedades enunciadas anteriormente (Goljan et al., 2009), permiten que una imagen pueda asociarse con un dispositivo de captura. La señal PRNU es un atributo bien conocido y muy utilizado. Este atributo extraído de las imágenes digitales fue usado por primera vez en Lukas et al. (2006); desde entonces, la comunidad científica ha propuesto diversos métodos que lo utilizan para identificar el dispositivo con el que se capturó una o más imágenes digitales (Lukas et al., 2006). Así, en Goljan et al. (2009) se desarrolló un algoritmo para extraer la señal PRNU y con ella identificar dispositivos de captura. También en Li (2010) se propuso un método para identificar el dispositivo de captura de imágenes digitales considerando la señal PRNU y los rastros de la escena. Así mismo, en Cooper (2013) se realizó una selección de los pixeles con mayor intensidad de señal PRNU, para que de ellos se extrajera dicha señal para el proceso de discriminación de los dispositivos de captura. En Saito et al. (2017) se propuso un método que reduce los falsos positivos cuando se identifica el dispositivo de captura agrupando pixeles a través de un modelo de cálculo probabilístico. También, en Balamurugan et al. (2017) se presentó un método de identificación del dispositivo de captura basado en la extracción de la señal PRNU que consta de tres etapas: filtrado, estimación y mejora. Por otra parte, en Mehrish et al. (2018) la señal PRNU se estimó a partir de datos probabilísticos con el mismo propósito y se extrajo de videos de WhatsApp utilizando un filtro de segundo orden. De igual forma, en Long et al. (2019) se propuso un método para medir la similitud de señales PRNU para identificar un dispositivo de captura. También, en Zhao et al. (2019) fue presentado un clasificador que considera la textura de las imágenes digitales para identificar su dispositivo de captura, buscando distinguir entre dispositivos del mismo modelo. Por su parte, en Long et al. (2019) se utilizaron medidas de similitud de la señal PRNU para proponer un algoritmo que identifica el dispositivo de captura de imágenes generadas por computadora. En Seshadri et al. (2020) se identificó el dispositivo de captura con una red neuronal convolucional pre-entrenada que utiliza características residuales.
Uno de los métodos más populares y utilizados para la extracción de la señal PRNU es el módulo de extracción de ruido que se encuentra en el algoritmo de identificación de dispositivos de captura desarrollado en Goljan et al. (2009). Ese módulo de extracción de la señal PRNU consta de dos etapas de filtrado, una es del tipo denoising, que devuelve el ruido con todos sus componentes separándola de la imagen sin ruido, y la otra aplica un filtro Wiener para que del ruido de la primera etapa de filtrado se eliminen los componentes de ruido aditivo, quedando así solo la señal PRNU. Así, a partir del uso de las señales PRNU contenidas en las imágenes digitales, en este trabajo se propone un método estadístico que, basado en la distancia de Hellinger, identifica el dispositivo de captura de una imagen digital. En el método propuesto se hace una distinción entre dos objetos, la huella digital del dispositivo de captura y la huella digital insertada en la imagen en disputa, la cual tiene relación con la huella digital del dispositivo que la capturó. Para obtener ambas huellas digitales se extrae la señal PRNU de las imágenes digitales y se calcula su correspondiente función de densidad de probabilidad (Probability Density Function [PDF]). La huella digital de una imagen en disputa será la PDF de la señal PRNU que le sea extraída, y la huella digital del dispositivo de captura será el promedio de las PDF obtenidas para las señales PRNU de 29 imágenes de referencia, las cuales se capturaron con ese dispositivo. En este método se generan 30 huellas digitales por dispositivo de captura de la siguiente manera:
-Con cada dispositivo se capturan 30 imágenes de referencia unitono y se numeran del 1 al 30.
-Para calcular la primera huella digital no se incluye en el promedio de las PDF, la PDF de la señal PRNU de la primera imagen de referencia.
-Para calcular la segunda huella digital no se incluye en el promedio de las PDF la PDF de la señal PRNU de la segunda imagen de referencia.
-Y así sucesivamente hasta obtener las 30 huellas digitales por dispositivo de captura.
Posteriormente, para cada una de las 20 imágenes en disputa por dispositivo de captura se calcula la distancia de Hellinger entre su huella digital insertada y las 30 huellas digitales de cada uno de los ocho dispositivos de captura candidatos. Después, para cada una de las 20 imágenes en disputa se cuantifica el porcentaje del número de veces que se obtuvo el valor más pequeño de las distancias de Hellinger calculadas entre su huella digital insertada y las 30 huellas digitales de todos los dispositivos de captura. El valor más pequeño de dicha distancia indica el dispositivo que capturó una imagen en disputa. Finalmente, por dispositivo de captura y para todas las imágenes en disputa se calcula el promedio de los porcentajes mencionados anteriormente. Con esto, el dispositivo de captura de cada imagen en disputa se identifica a través del valor más grande de los promedios calculados anteriormente para cada dispositivo de captura.
Además, con fines de comparación se presenta un programa de software desarrollado en MatlabTM, el cual integra tanto el método propuesto y los métodos propuestos en Goljan et al. (2009) y en Quintanar-Reséndiz et al. (2021).
Este trabajo está organizado como se indica a continuación. La sección de Materiales y Métodos describe el proceso de extracción de los metadatos y de las señales PRNU, así como el cálculo de las PDF de todas las señales PRNU extraídas de las imágenes a analizar. Se indican las ventajas de usar las señales PRNU como indicios para identificar el dispositivo de captura de una imagen digital y presenta la definición e implementación de la distancia de Hellinger como método estadístico de identificación. Así mismo, explica los supuestos del caso de estudio y los requisitos que debe cumplir un analista forense para el manejo de las imágenes y los dispositivos de captura que se reciben cuando se atiende un caso. También incluye un diagrama de proceso del proceder que debe seguir un analista forense, el cual sirvió para definir la funcionalidad del programa de software presentado. En la sección Resultados se presenta una descripción de los casos de estudios planteados y sus respectivas tablas de discriminación. También se calcula la precisión que tiene el método propuesto con base en el caso de estudio definido. Finalmente, se presenta la discusión y las conclusiones.
Materiales y métodos
El método de análisis forense propuesto en este trabajo consta de cuatro fases: Entrada, Procesamiento, Salida y Comparación. En la Figura 1 se muestra gráficamente cada una de ellas.

En la fase de Entrada se presentan la imagen en disputa y los dispositivos de captura con los que se obtendrán las imágenes de referencia. En esta fase, además, se verifica la integridad y autenticidad de los objetos digitales que se involucren en el proceso de identificación. Estas acciones permitirán conocer si dichos objetos digitales fueron o no modificados, lo que ayudará a fortalecer la cadena de custodia. En particular, la integridad de las imágenes analizadas se puede verificar a través de una función resumen, comúnmente denominada función HASH, la cual permite obtener una cadena de caracteres unívoca asociada a un archivo, en este caso una imagen digital. La aplicación de una función HASH a la imagen digital de interés permite disponer de un elemento de prueba que ayude a detectar si se generó algún cambio, aunque mínimo, en dicha imagen. Es importante resaltar que las funciones HASH se diseñan bajo el principio del efecto avalancha, esto quiere decir que un pequeño cambio en la cadena de caracteres, recibida a la entrada de la función, generará un gran cambio en la cadena de caracteres que se producen en su salida. Así, en este trabajo, para disponer de las funciones HASH se utiliza la herramienta reportada en Jan (2022), denominada DataHash, la cual contiene las funciones SHA-1, SHA-256, SHA-384, SHA-512, MD2 y MD5. Se considera el uso de esta herramienta debido a la diversidad de funciones HASH que ofrece, ya que incluye variantes de las dos más comunes, la SHA y la MD. Los formatos de salida que entrega esta herramienta son: hexadecimal, HEX, doble, uint8, base64, y para cada imagen digital el valor HASH se calcula a partir del contenido del archivo. En particular, en el programa de software presentado se preconfiguró el usó de la función SHA-1 con salida uint8.
Por otro lado, la autenticidad de la imagen se puede verificar a través de una función MAC (Message Autentication Code), que incluye la contraseña personal del analista que realiza el proceso forense. Una función MAC ayuda a asociar un objeto digital con una persona; en este caso, la función MAC relacionará a la imagen analizada con el analista forense que realizó el análisis. Así, durante el proceso de análisis forense se puede verificar que esa relación se mantenga sin cambio (Bellare et al., 1996). En este trabajo se usa la función HMAC propuesta en Grunnet (2021), la cual incluye las siguientes funciones HASH con contraseñas: SHA-1, SHA-256, SHA-384, SHA-512. De manera similar al caso de las funciones HASH, la herramienta propuesta por Grunnet (2021) ofrece funciones MAC basadas en las variantes de la función SHA. En este caso, y por consistencia con la verificación de integridad, la interfaz presentada tiene preconfigurada el usó de la función HMAC basada en SHA-1 con salida uint8.
En este trabajo, y en consistencia con lo indicado en Quintanar-Reséndiz et al. (2021) para un caso de análisis, el número de imágenes de referencia obtenidas por cada dispositivo de captura candidato se determina a través de una medida de invarianza. Después, se extrae la señal PRNU de las imágenes de referencia y de las imágenes en disputa. Para este proceso se hace uso del módulo de extracción de señal PRNU que se encuentra en el algoritmo de identificación de dispositivos de captura propuesto en Goljan et al. (2009). Este módulo de extracción de señal PRNU se basa en el modelo de ruido
Luego, en la fase de Procesamiento, para todas las señales PRNU extraídas se calcula su PDF, aproximándola a través de la frecuencia relativa como se explica en Quintanar-Reséndiz et al. (2021). Un ejemplo de la aproximación de la PDF se puede ver en la Figura 2; en este caso, se capturaron dos imágenes digitales con el dispositivo de captura Casio EX-Z150. La línea en rojo representa la PDF de una imagen considerada de referencia, y la línea punteada en azul representa la PDF de una imagen considerada en disputa. Nótese que las dos PDF son muy parecidas entre sí, esto se debe a que provienen de imágenes capturadas por el mismo dispositivo de captura.
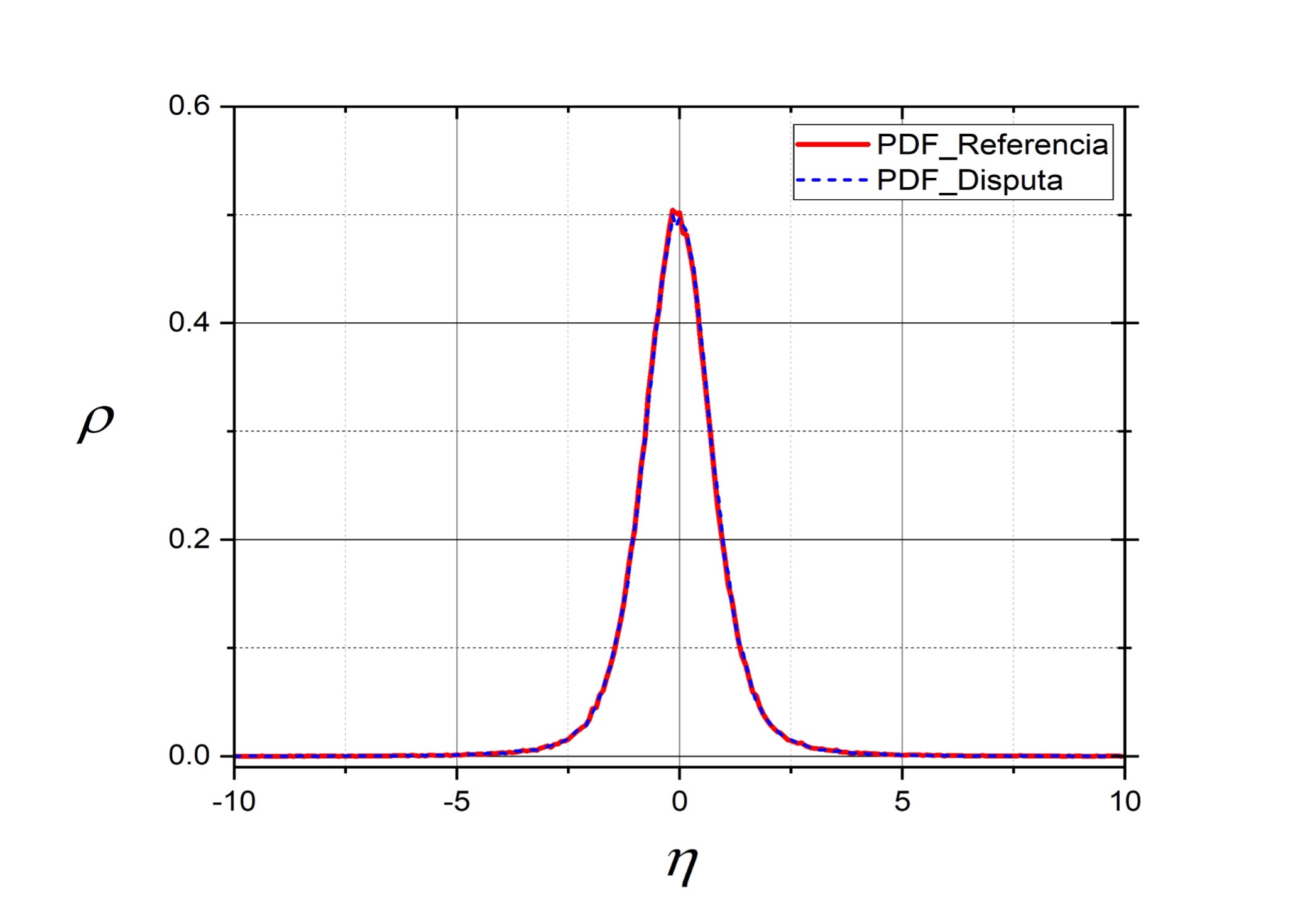
Fuente: Elaboración propia.
Figura 2 Aproximación de las PDF de dos señales PRNU extraídas de imágenes del mismo dispositivo de captura.
Un caso contrario es el que se presenta en la Figura 3. En este caso, la imagen de referencia se capturó con el dispositivo Casio EX-Z150, y la imagen considerada en disputa se capturó con el dispositivo Olympus μ1050SW. Nótese que es posible diferenciar entre dispositivos a través de la aproximación de las PDF.

Fuente: Elaboración propia.
Figura 3 Aproximación de las PDF de dos señales PRNU extraídas de imágenes de diferentes dispositivos de captura.
Entonces, para aproximar la PDF de una señal PRNU es necesario calcular la frecuencia relativa de sus componentes. En la Figura 4 se muestra un ejemplo de las variables involucradas en dicha aproximación.
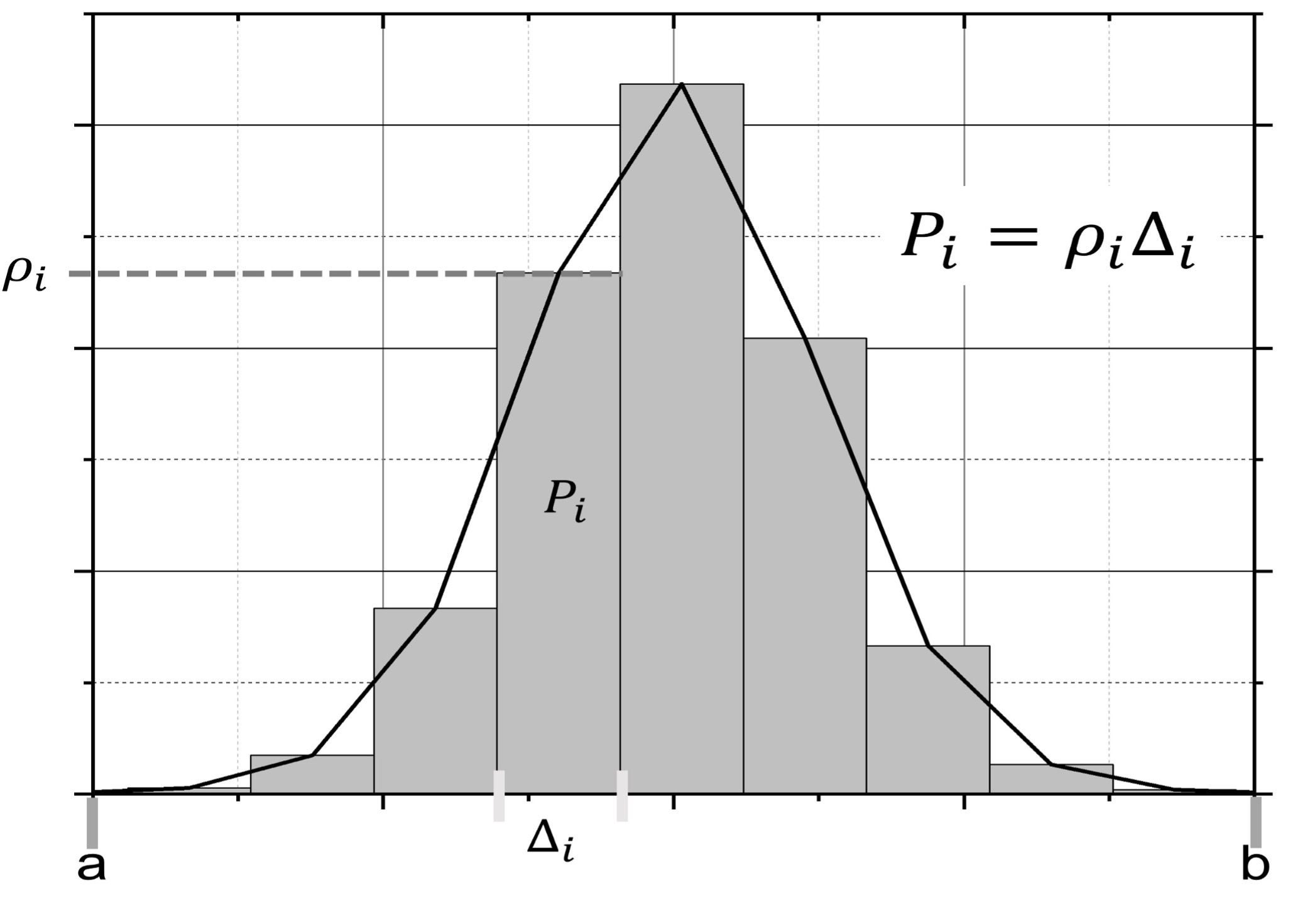
Fuente: Elaboración propia.
Figura 4 Variables involucradas en la aproximación de la PDF de una señal PRNU extraída de una imagen digital.
De este modo, considerando que la probabilidad de ocurrencia de los componentes en la señal PRNU en total debe ser igual a 1, primero se identifica el rango dinámico de la señal PRNU, esto es, el intervalo [a,b] donde existe la mayor cantidad de energía de la señal. Después, se define una partición de tamaño W, esto es, el número de subintervalos en los que se habrá de subdividir el intervalo de observación de la señal PRNU y que servirá para saber cuántas veces la señal PRNU visita cada subintervalo. En este caso, se considera W=256 y valor que permite observar una PDF de comportamiento suave. De la experiencia de este trabajo observamos que una W<100 genera un rizo en la PDF y consecuentemente una pérdida de precisión en su definición, y una W>256 implicaría mayor cálculo para estimar la PDF sin una ganancia importante en la precisión de su definición. Así, una aproximación a la PDF de la señal PRNU se puede establecer a partir de la probabilidad de ocurrencia de la señal PRNU asociada a cada subintervalo, según se expresa en la ecuación 1 y se observa en las Figuras 3 y 4.
donde
Por lo tanto, la aproximación a cada componente de la PDF de la señal PRNU se puede definir como sigue:
donde BAi indica si el píxel de ruido pertenece o no al subintervalo
Entonces, cuando se considera una partición regular, la ecuación 2 se puede escribir de la siguiente manera:
Es así como se puede calcular la PDF de la señal PRNU extraída de cada una de las imágenes digitales analizadas y, como se muestra en las Figuras 3 y 4, es posible usar la PDF como una huella digital que permita asociar una imagen en disputa con las imágenes de referencia tomadas de su dispositivo de captura.
Ahora, para realizar un proceso de discriminación objetivo se utiliza a la distancia de Hellinger como una métrica que permita encontrar la similitud entre las imágenes que pertenecen a un dispositivo de captura.
La integral de Hellinger fue introducida por E. Hellinger en 1909 y, en términos de ella, se definió la distancia de Hellinger (HLD), que es utilizada para medir la similitud entre dos funciones de densidad de probabilidad. Para obtener la HLD de dos PDF discretas: P = (p1, p2, p3, …, pN) y Q = (q1, q2, q3, …, qN), es necesario aplicar la ecuación 5 (Chang et al., 2015):
donde
Otra métrica que se utiliza para medir la similitud entre dos PDF es la divergencia de Kullback-Leibler (KLD) utilizada en Quintanar-Reséndiz et al. (2021), pero presenta un problema de cálculo, ya que se indetermina cuando se evalúa para los casos en que P = 0 o Q = 0. En esos casos, si no se tiene cuidado en la implementación, ocurre una división por 0 o el cálculo del logaritmo de 0. En una implementación práctica se tiene que establecer una condición que evite estas dos situaciones de indeterminación. En el caso de la HLD, esto no ocurre, ya que
Para el proceso de discriminación se considera que
Además, en este proceso, y con la finalidad de definir una medida de similitud, se identifica el dispositivo de captura
De esta manera, la tasa de asociación de la imagen de disputa
donde la función de pertenencia queda definida como
De este modo, la matriz de confusión definida para la fase Salida se construye a través de la función de similitud dada por la ecuación 9:
La matriz de confusión servirá como un resumen que permitirá ver todos los resultados de las imágenes analizadas contra los posibles dispositivos de captura. Las columnas de esta matriz representarán las imágenes en disputa analizadas, y en las filas se encontrarán los posibles dispositivos de captura. En la diagonal principal se espera que ocurran los valores máximos, indicando que aquel dispositivo de captura que se encuentre en la misma fila será el dispositivo de captura identificado. Completada la matriz de confusión se podrán determinar los dispositivos de captura para cada una de las imágenes en disputa analizadas y generar un informe técnico que además de presentarla indicará el porcentaje de precisión del método propuesto. Finalmente, se llegará a la fase de Comparación, en la que los resultados obtenidos pueden compararse contra los resultados obtenidos por otros autores. Cabe hacer mención que el programa de software desarrollado incluye también el método propuesto por Quintanar-Resendiz et al. (2021), y contra este método también podría hacerse una comparación para cualquier otro caso de estudio. En este trabajo se usa el mismo caso de estudio definido para Quintanar-Resendiz et al. (2021), y en la Sección de Resultados se presenta una comparación entre el método propuesto contra los métodos presentados por Quintanar-Resendiz et al. (2021). Con la finalidad de tener una herramienta de análisis forense que permita aplicar el método propuesto, se diseñó e implementó un programa de software en el entorno de MatlabTM. La Figura 5 muestra el diagrama de proceso que debe seguir un analista forense cuando pretende identificar un dispositivo de captura para una o más imágenes digitales utilizando el programa de software desarrollado. En este proceso las premisas operativas básicas que debe seguir son:
-Recibir una o varias imágenes en disputa, las cuales estarán bajo estudio, así como un conjunto de C dispositivos de captura candidatos.
-Generar para cada dispositivo de captura un conjunto de S imágenes de referencia. A partir de ellas, se obtendrá la huella digital de cada dispositivo de captura. En congruencia con Zhao et al. (2019) y Al-Ani & Khelifi (2017), el tamaño de cada conjunto debe incluir 50 imágenes, pero como lo menciona Quintanar-Reséndiz et al. (2021), es suficiente incluir en cada conjunto 30 imágenes, por lo tanto, S=30.
-Ejecutar un proceso de discriminación basado en la señal PRNU extraída con el algoritmo propuesto en Goljan et al. (2009) e identificar el dispositivo de captura a través de una implementación de la distancia de Hellinger que compara las PDF de las señales PRNU extraídas tanto de las imágenes en disputa como de las imágenes de referencia de cada dispositivo de captura candidato.
-Interpretar el reporte generado en este proceso y emitir una opinión técnica.
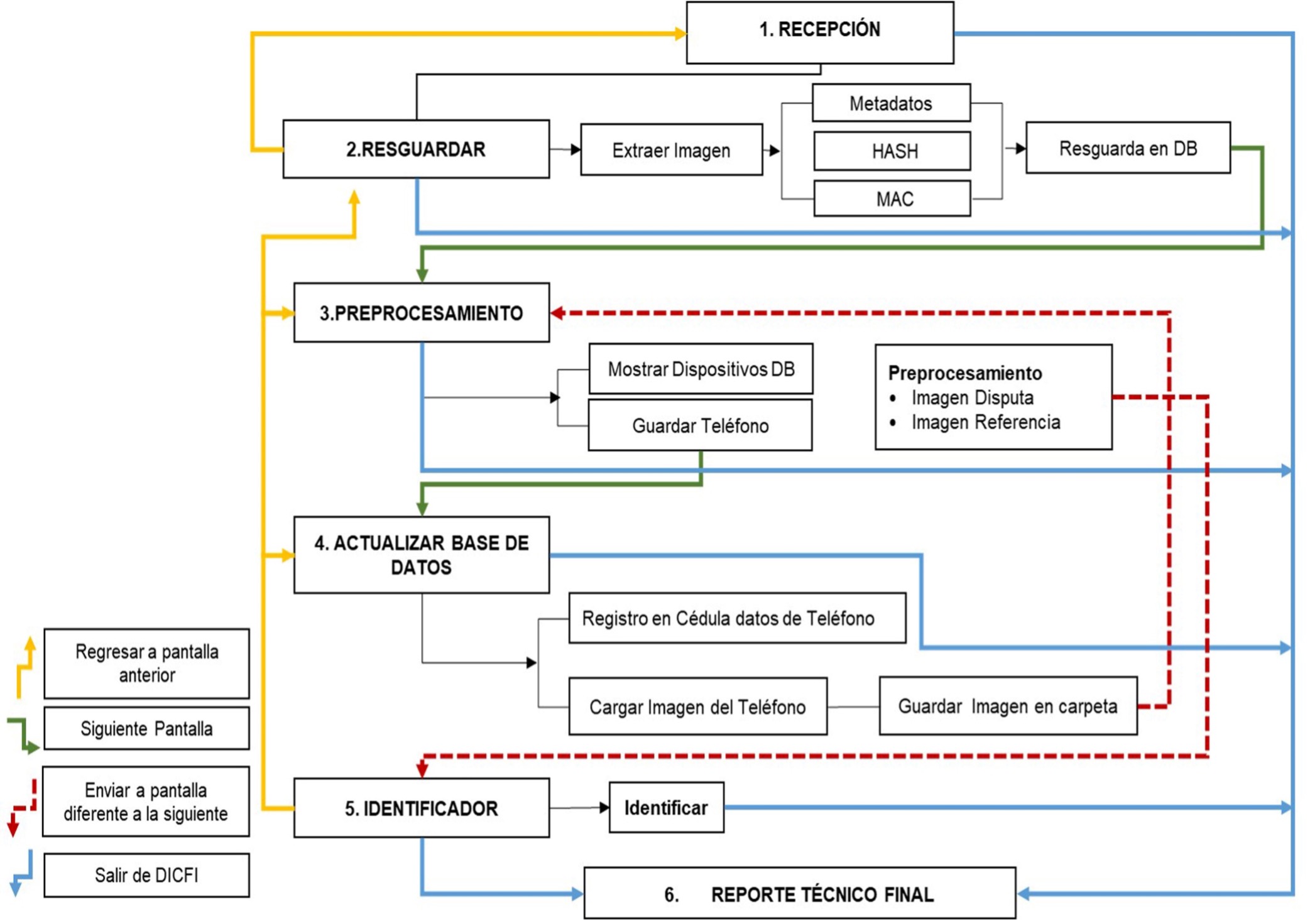
Fuente: Elaboración propia.
Figura 5 Diagrama de proceso que un analista forense debe seguir si quiere identificar el dispositivo de captura de una imagen digital en disputa a través del programa de software desarrollado en MatlabTM.
Los módulos del programa de software desarrollado son seis. Los módulos que corresponden a la fase de Entrada son del 1 al 4 y los módulos 5 y 6 corresponden a la fase de Procesamiento y Salida, respectivamente. En el módulo 1, “RECEPCIÓN”, se recibe la información del caso de estudio, las imágenes en disputa y los dispositivos de captura elegibles. En este módulo se debe documentar el caso de estudio. El módulo 2, “RESGUARDAR”, extrae de las imágenes en disputa los metadatos y los valores resumen (HASH y MAC). El módulo 3, “PREPROCESAMIENTO”, muestra los teléfonos registrados en la base de datos. El módulo 4, “ACTUALIZAR BASE DE DATOS”, permite, en caso necesario, registrar un nuevo dispositivo de captura y sus imágenes de referencia asociadas. El módulo 5, “IDENTIFICADOR”, procesa la imagen digital en disputa, y el módulo 6, “REPORTE TÉCNICO FINAL”, genera un informe con la opinión sobre la identificación del dispositivo de captura de la imagen digital en disputa.
Casos de estudio
En este trabajo se definieron dos casos de estudio que se construyeron con imágenes digitales descargadas de la base de datos de imágenes de Dresden propuesta en 2010 por Gloe & Bhöme (2010). El primer caso de estudio define la línea base de comparación de este trabajo, y fue preparado para mostrar el uso del algoritmo de Goljan et al. (2009). En este primer caso se seleccionaron 31 imágenes por cada uno de los C = 8 dispositivos de captura diferentes del apartado Flatfield frame. Para cada dispositivo de captura, de las 31 imágenes, se consideraron S = 30 como imágenes de referencia y se usan para construir la huella digital del dispositivo de captura; la imagen restante se considera como imagen en disputa, esto es N = 1. De esta manera, en total se usaron 240 imágenes de referencia y ocho imágenes en disputa. Las características del caso de estudio se pueden ver en la Tabla 1.
Tabla 1 Características del caso de estudio 1.
| Fuente de Captura | Nemotécnico | Resolución | Imágenes de Referencia |
Imágenes en Disputa |
| Casio Ex-Z150 | CE50 | 3264×2448 | 30 | 1 |
| Canon Ixus-55 | CI55 | 1944×2592 | 30 | 1 |
| Canon Ixus-70 | CI70_1 | 2304×3072 | 30 | 1 |
| Canon Ixus-70 | CI70_2 | 2304×3072 | 30 | 1 |
| Nikon S710 | NS71 | 3264×4352 | 30 | 1 |
| Olympus Mju | OM10 | 3648×2736 | 30 | 1 |
| Praktica Dcz-5.9 | PD59 | 2560×1920 | 30 | 1 |
| Rollei 7325xs | RO73 | 3072×2304 | 30 | 1 |
Fuente: Elaboración propia.
El segundo caso de estudio fue preparado ampliando el primer caso y se aplica para mostrar el uso del método propuesto. Es más amplio que el primer caso, ya que no considera una imagen en disputa, sino 20 por cada dispositivo de captura. Las imágenes digitales adicionales usadas para este segundo caso de estudio también se tomaron de la base de datos de Dresden. De esta forma, se seleccionaron 50 imágenes digitales por cada uno de los C = 8 dispositivos de captura. De cada dispositivo se tomaron S = 30 imágenes de referencia y N = 20 imágenes en disputa. En total se usaron 240 imágenes de referencia y 160 imágenes en disputa. Las características de este caso de estudio se encuentran en la Tabla 2. Es importante hacer notar que este segundo caso de estudio es el mismo usado en Quintanar-Reséndiz et al. (2021) para cuando se evaluó el algoritmo de Goljan et al. (2009) y el método ahí propuesto.
Tabla 2 Características del caso de estudio 2.
| Fuente de Captura | Nemotécnico | Resolución | Imágenes de Referencia |
Imágenes en Disputa |
| Casio Ex-Z150 | CE50 | 3264×2448 | 30 | 20 |
| Canon Ixus-55 | CI55 | 1944×2592 | 30 | 20 |
| Canon Ixus-70 | CI70_1 | 2304×3072 | 30 | 20 |
| Canon Ixus-70 | CI70_2 | 2304×3072 | 30 | 20 |
| Nikon S710 | NS71 | 3264×4352 | 30 | 20 |
| Olympus Mju | OM10 | 3648×2736 | 30 | 20 |
| Praktica Dcz-5.9 | PD59 | 2560×1920 | 30 | 20 |
| Rollei 7325xs | RO73 | 3072×2304 | 30 | 20 |
Fuente: Elaboración propia.
Resultados
Con la finalidad de ilustrar cómo funciona el método propuesto, se usaron los dos casos de estudio descritos en la sección anterior. Para el primer caso, la Tabla 3 muestra los valores de correlación obtenidos utilizando el algoritmo propuesto en Goljan et al. (2009). En este primer caso, los dispositivos de captura fueron numerados del 1 al 8, al igual que se hizo con las imágenes en disputa, de manera que se sabe con seguridad que la imagen en disputa j = 1, 2, 3, …, 8 corresponde al dispositivo de captura j. En la Tabla 3, las filas corresponden a los dispositivos de captura y las columnas a las imágenes en disputa. Cada celda corresponde al valor de correlación que genera el algoritmo de Goljan et al. (2009) cuando se contrasta la imagen en disputa D j con el dispositivo de captura C j , considerando que j = 1, 2, 3, …, 8. Note que en la diagonal principal de la Tabla 3 existe un valor relativo de referencia que corresponde a los valores máximos por columna de todos los valores de correlación. Estos valores máximos corresponden a la posición en la que coinciden una imagen en disputa con su dispositivo de captura. Además, debe resaltarse también que en todos los casos analizados las identificaciones son positivas, ya que cada imagen en disputa genera el valor máximo de correlación con el dispositivo de captura que la capturó. Pero se selecciona aquella cuyo valor es el más grande de todos. De esta forma, la Tabla 4 expresa la razón de similitud calculada a partir de los resultados de la Tabla 3. Nótese que se conserva el criterio de que las filas corresponden a los dispositivos de captura y las columnas a las imágenes en disputa. En este caso, el valor máximo de la razón de similitud es del 100%, lo que quiere decir que la imagen en disputa está totalmente correlacionada con el dispositivo de captura correspondiente. El valor mínimo de la razón de similitud es 0% y quiere decir que no hay absolutamente ninguna correlación entre la imagen en disputa y el dispositivo de captura correspondiente. Es importante resaltar que en la diagonal principal de la Tabla 4 se encuentra el valor máximo de la razón de similitud. Así, los resultados reportados confirman que el algoritmo propuesto por Goljan et al. (2009) asocia correctamente cada imagen en disputa con su respectivo dispositivo de captura.
Tabla 3 Resultados de correlación cuando se implementa el algoritmo de Goljan et al. en el caso de estudio 1.
| Imágenes en Disputa | |||||||||
| Dispositivos de Captura | CE50 | CI55 | CI70_1 | CI70_2 | NS71 | OM10 | PD59 | R073 | |
| CE50 | 29123 | -0.108 | -0.093 | -0.032 | -0.329 | -0.152 | -1.288 | 0.683 | |
| CI55 | 0.224 | 96244 | -0.974 | 0.003 | 0.895 | -0.003 | 2.761 | -0.500 | |
| CI70_1 | -0.004 | 0.856 | 21095 | 0.840 | -2.062 | 1.369 | -0.000 | 0.476 | |
| CI70_2 | 0.047 | 1.362 | 0.001 | 46477 | -0.695 | -2.036 | 0.229 | 0.513 | |
| NS71 | 0.006 | -0.327 | -2.922 | -1.043 | 6450 | 0.110 | -1.106 | 2.532 | |
| OM10 | 1.572 | 0.023 | 0.521 | -1.275 | 0.008 | 12280 | -0.053 | 0.747 | |
| PD59 | -0.019 | 0.651 | 0.066 | 3.946 | 1.140 | -0.272 | 48217 | -0.039 | |
| R073 | -0.085 | -0.193 | -1.524 | -0.849 | 0.165 | -0.205 | 3.392 | 39152 | |
Fuente: Elaboración propia.
Tabla 4 Similitud en porcentaje cuando el algoritmo de Goljan et al. se aplica al caso de estudio 1.
| Imágenes en Disputa | |||||||||
| Dispositivos de captura | CE50 | CI55 | CI70_1 | CI70_2 | NS71 | OM10 | PD59 | R073 | |
| CE50 | 100 | 0.000 | 0.000 | 0.000 | 0.005 | 0.001 | 0.003 | 0.002 | |
| CI55 | 0.001 | 100 | 0.005 | 0.000 | 0.014 | 0.000 | 0.006 | 0.001 | |
| CI70_1 | 0.000 | 0.001 | 100 | 0.002 | 0.032 | 0.011 | 0.000 | 0.001 | |
| CI70_2 | 0.000 | 0.001 | 0.000 | 100 | 0.011 | 0.017 | 0.001 | 0.001 | |
| NS71 | 0.000 | 0.000 | 0.014 | 0.002 | 100 | 0.001 | 0.002 | 0.007 | |
| OM10 | 0.005 | 0.000 | 0.003 | 0.003 | 0.000 | 100 | 0.000 | 0.002 | |
| PD59 | 0.000 | 0.001 | 0.000 | 0.009 | 0.018 | 0.002 | 100 | 0.000 | |
| RO73 | 0.000 | 0.000 | 0.007 | 0.002 | 0.003 | 0.002 | 0.007 | 100 | |
Fuente: Elaboración propia.
Por otro lado, para el segundo caso de estudio, los resultados de las comparaciones se encuentran en la Tabla 5; para este caso, C = 8, S = 30 y N = 20 y el grado de pertenencia de una imagen en disputa, con cada dispositivo de captura considerado, se determina a través de la razón de similitud definida en la ecuación 8. Por lo tanto, cada celda contiene el valor de razón de similitud,
Tabla 5 Similitud en porcentaje obtenida cuando el algoritmo propuesto se aplica al caso de estudio 2.
| Imágenes en Disputa | |||||||||
| Dispositivos de Captura | CE50 | CI55 | CI70_1 | CI70_2 | NS71 | OM10 | PD59 | R073 | |
| CE50 | 100.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | |
| CI55 | 0.00 | 100.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | |
| CI70_1 | 0.00 | 0.00 | 96.33 | 0.50 | 0.00 | 0.00 | 0.00 | 0.00 | |
| CI70_2 | 0.00 | 0.00 | 3.67 | 99.50 | 14.33 | 0.00 | 0.00 | 0.00 | |
| NS71 | 0.00 | 0.00 | 0.00 | 0.00 | 85.67 | 0.00 | 0.00 | 0.00 | |
| OM10 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 100.00 | 0.00 | 0.00 | |
| PD59 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 100.00 | 0.00 | |
| RO73 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 100.00 | |
Fuente: Elaboración propia.
Dado que el segundo caso de estudio es el mismo que el presentado en Quintanar-Reséndiz et al. (2021), la comparación de la Tabla 5 puede hacerse de manera directa contra las tablas de resultados expresadas en aquel trabajo. La Tabla 6 permite comparar los resultados aplicando tanto el método de Goljan et al. como el de Quintanar-Resendiz et al. a través de la efectividad del proceso de identificación de los tres algoritmos considerados. Esta tabla resumen se construye a partir de los resultados reportados en Quintanar-Reséndiz et al. y los resultados presentados en este trabajo.
Tabla 6 Comparación entre métodos para la identificación de dispositivos de captura cuando se comparan las huellas digitales insertadas en las imágenes en disputa contra la huella digital de su dispositivo de captura.
| Objetos de Comparación | Porcentaje de similitud para identificación | ||
| PCE (Quintanar-Reséndiz, et al., 2021) |
KLD (Quintanar-Reséndiz, et al., 2021) |
HLD Algoritmo propuesto |
|
| N_CE50 vs C_CE50 | 100.00 | 100.00 | 100.00 |
| N_CI55 vs C_ CI55 | 100.00 | 100.00 | 100.00 |
| N_CI70_1 vs C_CI70_1 | 100.00 | 95.00 | 96.33 |
| N_CI70_2 vs C_ CI70_2 | 100.00 | 99.82 | 99.50 |
| N_NS71 vs C_ NS71 | 100.00 | 100.00 | 85.67 |
| N_OM10 vs C_ OM10 | 100.00 | 100.00 | 100.00 |
| N_PD59 vs C_ PD59 | 100.00 | 100.00 | 100.00 |
| N_RO73 vs C_ RO73 | 100.00 | 100.00 | 100.00 |
| Precisión | 100.00 | 99.35 | 97.68 |
Fuente: Elaboración propia.
Adicionalmente, las Tablas 7 y 8 presentan los dos algoritmos fundamentales del método propuesto para el proceso de discriminación. El algoritmo 1 (HLD) estima la divergencia de Hellinger que existe entre dos funciones de densidad de probabilidad. El algoritmo 2 (maxSIM) encuentra el valor máximo de similitud en la matriz de confusión que contiene los valores promedio de similitud. Aquellos dispositivos de captura cuyos valores promedio de similitud son los valores máximos se consideran como los dispositivos de captura de las imágenes en disputa.
Tabla 7 Primer algoritmo fundamental del método propuesto para el proceso de discriminación.
Fuente: Elaboración propia.
Tabla 8 Segundo algoritmo fundamental del método propuesto para el proceso de discriminación.
Fuente: Elaboración propia.
Discusión
Ante la realidad de que el marco legal mexicano permite el uso de imágenes digitales como soporte en un juicio, se tiene la necesidad de contar con herramientas que faciliten el trabajo de un analista forense cuando se quiere saber cuál es la fuente de origen de una imagen digital. Es así como este trabajo presenta un método basado en la distancia de Hellinger, calculada entre la huella digital de los dispositivos de captura y la huella digital insertada en las imágenes en disputa para identificar su dispositivo de captura. Las huellas digitales se basan en la PDF de señales PRNU extraídas, por un lado, de imágenes de referencia capturadas con los dispositivos candidatos y, por otro, de las imágenes en disputa. El criterio de asociación que el método propuesto utiliza es el valor máximo de similitud encontrado entre los valores promedio de similitud de cada dispositivo de captura candidato. Entonces, el método propuesto permite asociar unívocamente cada imagen en disputa con su respectivo dispositivo de captura, ya que cuando se comparan las imágenes de disputa contra los dispositivos de captura el porcentaje para cinco de los ocho teléfonos se obtuvo una similitud del 100% cuando la imagen en disputa proviene del ese dispositivo. En los otros tres casos se alcanzó una similitud de 96.33%, 99.50% y 85.67%; se asume siempre que en cada caso la imagen en disputa no fue manipulada.
Al comparar, para el mismo caso de estudio, los resultados obtenidos del método propuesto contra los de Goljan et al. y Quintanar-Reséndiz et al., se encuentra que el método de Goljan et al. es mejor en cuanto a que el porcentaje de similitud alcanza el 100% para la identificación de dispositivos de captura desde una imagen digital no manipulada; pero, como lo menciona Quintanar-Reséndiz et al., el método de Goljan et al. requiere más tiempo para la identificación, ya que es 3.23 veces más lento. Por el contrario, el método de Quintanar-Reséndiz et al. es más rápido, pero menos preciso, ya que su porcentaje de similitud promedio es de 99.35%. Además, para su implementación, se debe considerar y evitar las posibles indeterminaciones de la función KLD, cuando P = 0 o Q = 0. En esos casos, sin el debido cuidado de implementación, ocurriría una división por 0 o el cálculo del logaritmo de 0. Por otra parte, el tiempo de identificación para el método propuesto es semejante al de Quintanar-Reséndiz et al. debido a que, además de procesar recortes y no imágenes completas, utiliza la comparación entre PDF. El método propuesto se basa en la función de HLD que, contrariamente a la función de KLD usada en el método de Quintanar-Reséndiz et al., no presenta problemas de indeterminación en su implementación, ya que cuando se utiliza la función HLD ocurre que
Por otro lado, el método propuesto encuentra su realización práctica a través de un programa de software desarrollado en MatlabTM, el cual ofrece una solución sencilla e intuitiva para identificar el dispositivo de captura de una o más imágenes digitales no manipuladas. Además, esta herramienta incluye un módulo para la extracción de metadatos, el tratamiento de imágenes digitales (en disputa o de referencia) y la comparación de las huellas digitales de los dispositivos de captura registrados contra la huella digital insertada en cada imagen en disputa. La comparación se puede hacer utilizando alguno de los métodos de identificación habilitados. Esta herramienta al ser modular permite incluir otros algoritmos de identificación de dispositivo de captura, así como otras herramientas de verificación de integridad y autenticidad de las imágenes digitales.
La Figura 6 muestra un ejemplo del módulo de identificación del programa de software desarrollado. Este módulo menciona los tres métodos de identificación comparados en la sección de Resultados. Enfatizamos aquí que el algoritmo de Goljan et al. consta de dos módulos, uno relativo a la extracción de la señal PRNU y otro para la identificación de dispositivos de captura basado en la correlación tipo PCE que existe entre la señal PRNU de la imagen en disputa contra la huella digital de los dispositivos de captura, la cual se obtiene de la señal PRNU acumulada de las imágenes digitales consideradas como de referencia. Además, en la Figura 7 se muestra un ejemplo del informe que consta de dos páginas. Una primera versión de esta interfaz fue registrada ante INDAUTOR y su número de registro es 03-2021-021111590100-01.

Fuente: Elaboración propia.
Figura 6 Vista del módulo IDENTIFICADOR para el programa de software desarrollado en MatlabTM.

Conclusiones
El trabajo realizado presenta un método basado en la distancia de Hellinger, el cual permite discriminar a qué dispositivo de captura corresponde una imagen digital. La distancia de Hellinger se calcula entre la huella digital de cada dispositivo de captura candidato y la huella digital insertada en la imagen en disputa. En este trabajo se pone de manifiesto que el método aquí propuesto es más rápido que el método de Goljan et al. y no tiene los problemas de implementación práctica como los presentados por el método de Quintanar-Reséndiz et al., basado en la función de KLD. El método propuesto se implementó en un programa de software que, además de utilizar el método propuesto, permite conectar diferentes métodos para la identificación del dispositivo de captura de imágenes digitales en formato JPEG, sin que el usuario tenga que ser un experto en la codificación de algoritmos para estos métodos. La comparación del método propuesto contra el método de Goljan et al. y el método de Quintanar-Reséndiz et al. se hizo a través de un caso de estudio que considera ocho dispositivos de captura, 240 imágenes de referencia (30 por dispositivo de captura) y 160 imágenes en disputa (20 por dispositivo de captura). Los porcentajes promedio de similitud obtenidos fueron de 100%, 99.35% y 97.68%. Aunque el porcentaje promedio de similitud obtenido para el método propuesto es ligeramente menor que para los otros dos métodos, el método propuesto tiene las siguientes ventajas: es más rápido que el método de Goljan et al. y durante su implementación no requiere que se impongan condiciones para evitar alguna indeterminación como ocurre en el método de Quintanar-Reséndiz et al., que está basado en la función KLD. El programa de software presentado genera un informe en formato PDF y al imprimirse queda prácticamente listo para que sea firmado por el analista y entregado al solicitante del servicio.
Conflictos de interés
Los autores declaran que no tienen intereses económicos conocidos ni relaciones personales que pudieran haber influido en el trabajo presentado en este artículo.

