











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
El transductor octagonal de anillo extendido es usado para medir de manera adecuada las fuerzas horizontales y verticales que actúan simultáneamente sobre los implementos de labranza, cuando se realiza trabajo de roturación de suelo (Raheman y Sahu, 2006). Abbaspour y Khanramaki (2013) diseñaron, construyeron y calibraron un dinamómetro para medir las fuerzas y los momentos aplicados en implementos de labranza, este dinamómetro es capaz de medir las tres fuerzas ortogonales que actúan sobre el implemento y los tres momentos que actúan alrededor de los ejes ortogonales, hasta una fuerza máxima de 20 kN y un momento máximo de 20 kN m; el dinamómetro utiliza dos transductores octagonales de anillo extendidos. Kostic et al. (2014) desarrollaron un sistema de enganche de tres puntos para medir la fuerza de tiro de los implementos de labranza, las pruebas fueron realizadas tanto en laboratorio como en condiciones de campo para confirmar la confiabilidad del sistema de medición y analizar el método de medición del espectro de la frecuencia de muestreo; los resultados de la calibración mostraron un coeficiente de determinación R2 de 0.99 para la función lineal. Kheiralla et al. (2003) diseñaron y desarrollaron un dinamómetro en “U” invertida empleando para este propósito tres octagonales extendidos con capacidad de 10 kN para la carga vertical y 25 kN para la carga horizontal encontrando entre las cargas medidas y las aplicadas un coeficiente de correlación r de 0.99. Khan et al. (2007) diseñaron un sistema de transductor biaxial para medir las fuerzas del agregado tractor-implemento, mostrando que la sensibilidad cruzada del sensor fue menor a 1.5% para la mayoría de los casos. Alimardani et al. (2008), construyeron un dinamómetro a tres puntos en forma de “U”, midiéndose fuerzas en la horizontal de 4.2 kN, y en la dirección vertical de 1.5 kN obtuvieron una sensibilidad promedio de 3.75 mV kN-1 y un coeficiente de correlación r de 0.99. Distintos autores a decir de McLaughlin et al. (1998), Khan et al. (2007) y Reynolds et al. (2015) no mencionan el error existente en las mediciones de las fuerzas de reacción del suelo o en las calibraciones de laboratorio al trabajar con sistemas de sensores de doble anillo extendido, cuando estos son cargadas a diferentes brazos de palanca y con diferentes tipos de empotramiento. Campos-Magaña et al. (2015a) desarrollaron y evaluaron un sistema integral de medición de fuerzas para implementos de labranza, en el cual acoplaron sensores octagonales de doble anillo extendido en el enganche de tres puntos del tractor por medio de una estructura de acoplamiento, y mencionan que en un cambio de profundidad de 0.10 m, las constantes de calibración disminuyen hasta un 5%.
Campos-Magaña et al. (2015a) sugieren la calibración en laboratorio de un sistema integral de fuerzas (SIF) de sensores octagonales de anillo extendido (OAE) con un brazo de palanca similar a la profundidad de trabajo que se realiza en campo, ya que por abajo o por encima de la distancia de calibración, la fuerza resultante subestima o sobreestima la magnitud de las fuerzas. Señalando la necesidad de estimar la magnitud del error de medición en el SIF.
El objetivo de este trabajo fue corroborar la magnitud de la estimación del error en la medición de las fuerzas de reacción del suelo en implementos integrales detectadas por el SIF en comparación con la magnitud de las fuerzas reales monitoreadas por los sensores octagonales individuales, en condiciones de laboratorio y de campo.
MATERIALES Y MÉTODOS
El error de medición entre el SIF y los sensores individuales fue determinado a partir de: a) pruebas en laboratorio y b) evaluación de campo. Los sensores empleados fueron del tipo de Sensores octagonales de anillo extendido con una capacidad a la fuerza de tiro de 40 kN y un par de 36 kN-m como los descritos por Campos-Magaña et al. (2015b) La ecuación del error en condiciones de laboratorio debido al cambio de profundidad de laboreo contra las cargas que representan las fuerzas de tiro, se obtuvo de acuerdo a Campos-Magaña et al. (2015a). La evaluación en laboratorio se llevó a cabo en las instalaciones del Departamento de Maquinaria Agrícola de la Universidad Autónoma Agraria Antonio Narro (UAAAN). Los materiales y equipos que se utilizaron para la evaluación bajo condiciones de laboratorio se muestran en la Figura 1.
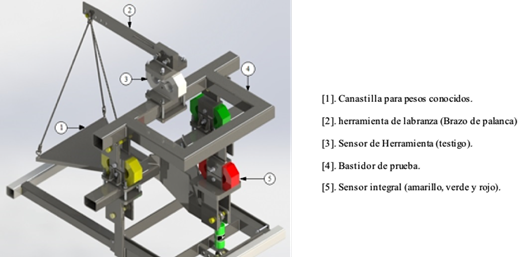
Figura 1: Banco de pruebas con los sensores acoplados simulando el trabajo en campo. Figure 1: Test bench with sensors coupled simulating field work.
El SIF está integrado principalmente por tres componentes, como se muestra en la Figura 1, los sensores verde y amarillo que permiten monitorear la fuerza de tiro, el sensor rojo (5) para monitorear la trasferencia de peso y el bastidor de enganche de los tres puntos. Los otros elementos que integran este banco de pruebas son el sensor testigo (4), la herramienta de trabajo (2) y la canastilla de carga de los pesos conocidos (1).
Para determinar el efecto de la profundidad de laboreo sobre la constante de calibración se planteó un diseño completamente al azar con un arreglo factorial de 2 × 5 × 5 y tres repeticiones, donde el factor A consistió en dos sensores octagonales de referencia (verde-azul y Rojo-amarillo) acoplados a un banco de pruebas (Figura 1) y utilizado uno a la vez, el factor B la longitud del brazo de palanca: 0.60, 0.70, 0.80, 0.90 y 1.05 m y el factor C el peso acumulado: 470, 940, 1410, 2126 y 2842 N. Para contrastar el efecto del brazo de palanca se empleó un sensor [3] acoplado directamente al bastidor [4]-la herramienta [2] y la canastilla [1] de la (Figura 1), con los pesos conocidos. Para el registro de la información se utilizó un sistema de adquisición de datos Daq-book 2000 (Measurement Computing) y un acondicionador de señales DBK-43A (Iotech, Inc.). Las ecuaciones de regresión lineal para la determinación de las constantes se determinaron empleando el programa estadístico Minitab V.17 (Minitab Inc.) y los análisis de varianza se realizaron en el programa estadístico de la Universidad Autónoma de Nuevo León V.1.4. (UANL). El procedimiento de calibración del equipo, así como la secuencia de evaluación bajo condiciones de laboratorio se realizaron de acuerdo a Campos-Magaña et al. (2015a).
Las evaluaciones de campo se llevaron a cabo en el campo experimental de la Universidad Autónoma Agraria Antonio Narro (UAAAN), con coordenadas geográficas 25° 21.610’ N y 101° 2.258’ O. En la Figura 2a se observa el sistema de adquisición de datos utilizado para registrar las fuerzas de reacción medidas por los sensores instalados en el arado de cinceles (Figura 2b).

Figura 2: a) Sistema de adquisición de datos montado sobre el tractor. b) Agregado tractor-arado de cinceles instrumentado: con dos octagonales de doble anillo (amarillo, verde) [1] sensores octagonales de referencia [2] y [3], cinceles de roturación [4] y bastidor [5]. Figure 2: a) Data acquisition system mounted on the tractor. b) Tractor-plow attachment of instrumented chisels: with two octagonal double rings (yellow, green) [1] octagonal reference sensors [2] and [3], breakage chisels [4] and frame [5].
Los arreglos en campo se hicieron para verificar la confiabilidad del sensor integral con tres cinceles colocados en un bastidor rígido a decir, dos cinceles en la barra frontal del bastidor y un tercer cincel en la barra posterior acondicionado para trabajar a profundidad variable (Cuadro 1) La profundidad para los dos cinceles delanteros fue de 0.20 m y el cincel trasero se trabajó a tres diferentes profundidades de 0.20, 0.30 y 0.40 m con cuatro repeticiones por arreglo, para un tamaño de parcela de 80 por 8 m. Se utilizó además un cuarto arreglo como testigo de 0.30‑0.30 m, de profundidad trabajo.
Cuadro 1: Arreglos de profundidad para el trabajo de campo. Table 1: Depth arrangements for field work.
| Arreglos | Profundidad |
|---|---|
| m | |
| 2CF + 1CT | 0.30-0.30 |
| 0.20-0.20 | |
| 0.20-0.30 | |
| 0.20-0.40 |
CF = cincel frontal; CT = cincel trasero.
CF = front chisel; CT = rear chisel.
Las variables obtenidas en campo fueron los voltajes que representan una relación lineal con las fuerzas de reacción del suelo, registradas con el sistema de adquisición de datos Daq-Book 2000 (Measurement Computing) y el acondicionador de señales DBK-43A (Iotech Inc.). Para el procesamiento de la información se utilizaron los métodos de valores del espectral y del área bajo la curva generada por las señales de las deformaciones en volts contra el número de datos (Campos-Magaña, 2015a). Se realizó un análisis de varianza con el paquete estadístico UANL V1.4 (UANL) para determinar cuál método era el más confiable para la estimación del error entre el SIF y los sensores de referencia.
RESULTADOS Y DISCUSIÓN
Estimación del Error en la Medición de las Fuerzas del SIF Bajo Condiciones de Laboratorio
El propósito de las pruebas de laboratorio consistió en la determinación de la ecuación del error de las mediciones de las fuerzas con los sensores integrales del SIF y el sensor de referencia (Figura 1). También fueron obtenidas las constantes de calibración para cada sensor con una carga máxima de 2845 N (Guillen-Sánchez et al., 2018) para los cinco diferentes brazos de palanca utilizados (0.60, 0.70, 0.80, 0.90 y 1.05 m), simulando diferentes profundidades de laboreo.
El comportamiento de los voltajes de las herramientas de trabajo medidas por los sensores integrales del SIF y el sensor de referencia para un brazo de palanca de 0.60 m con cinco niveles de las cargas utilizadas, se muestra en la Figura 3.
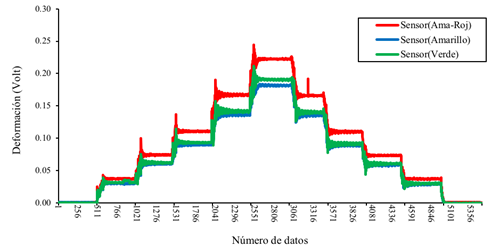
Figura 3: Efecto de cinco cargas acumuladas sobre la deformación de los OAE, en voltaje, para un brazo de palanca de 0.60 m. Figure 3: Effect of five accumulated loads on OAE deformation, in voltage, for a lever arm of 0.60 m.
En esta gráfica se observa el comportamiento de los voltajes de los dos sensores del transductor integral, para un brazo de palanca de 0.60 m con una carga máxima de 2845 N contrastándolo con el sensor de referencia, el cual simuló la magnitud de la fuerza de trabajo de la herramienta de labranza (Figura 1). Se observó un comportamiento similar entre los sensores del SIF lo que indica que tienen una deformación similar al detectar la fuerza horizontal que representa la fuerza de tiro. Además, se aprecia que la magnitud del voltaje del sensor de referencia, acoplado directamente a la herramienta, es ligeramente mayor que el voltaje en los sensores del SIF. Este comportamiento de los sensores testigos se manifiesta en todos los rangos de brazos de palanca a excepción del brazo de palanca cercano de los 0.90 m en donde el comportamiento de las gráficas no muestra diferencia.
El análisis de varianza, de las respuestas de los sensores a los cinco brazos de palanca a diferentes cargas, indicó que existe diferencia significativa en el monitoreo de las fuerzas debidas a la magnitud del brazo de palanca y sin cambios significativos en la magnitud de fuerzas de reacción detectadas por cada sensor del SIF para una misma posición del brazo de palanca equivalente a la profundidad de laboreo. El valor máximo promedio detectado en los sensores integrales del SIF, fue de 0.278 V que corresponde a la fuerza de tracción máxima de 2485 N para un brazo de palanca de 1.05 m.
El Cuadro 2 muestra las medias de las respuestas en cada una de las posiciones de los brazos de palanca para los sensores integrales del SIF. La comparación múltiple de medias presentó diferencias estadísticas significativas entre las magnitudes de los voltajes en función de las posiciones de los brazos de palanca.
Cuadro 2: Comparación de medias de los voltajes obtenidos por los sensores del SIF en función, de los brazos de palanca para una carga de 2845 N. Table 2: Comparison of voltage means obtained by the SIF sensors as a function of the lever arms for a load of 2845 N.
| Brazo de palanca | Media de las respuestas |
|---|---|
| m | volt |
| 1.05 | 0.278 a † |
| 0.90 | 0.247 b |
| 0.80 | 0.239 b |
| 0.70 | 0.215 c |
| 0.60 | 0.198 d |
† Letras distintas en la misma columna indican diferencias estadísticas significativas, según la prueba de Tukey (P ≤ 0.05).
† Different letters in the same column indicate significant statistical differences, according to the Tukey test (P ≤ 0.05).
En la Figura 4, se muestra la curva de la regresión entre las cargas (N) y los voltajes (V) para un brazo de palanca de 0.70 m, obteniendo una constante de calibración de 13.36 kN V-1, con un coeficiente de determinación ajustado (R2) de 0.997 que indica una relación lineal de la deformación entre los pesos conocidos (N) y los voltajes (V) obtenidos por los sensores para una profundidad fija de trabajo. Raheman y Sahu (2006), Campos-Magaña et al. (2015c) y Guillen-Sánchez et al. (2017), reportaron coeficientes de determinación similares en las calibraciones en laboratorio de los octagonales de doble anillo utilizando pesos conocidos.
El análisis de varianza para las constantes obtenidas de los sensores verde y amarillo del SIF por efecto del cambio de las magnitudes de las cargas y brazos de palanca no mostró diferencias significativas en la medición de los voltajes obtenidos de los sensores integrales del SIF para cada posición especifica del brazo de palanca, sin embargo, para el factor de las magnitudes del brazo de palanca, sí presentó diferencia significativa de los sensores integrales del SIF contra los sensores de referencia lo cual confirma que la magnitud del brazo de palanca afecta la medición real detectada por los sensores integrales del SIF.
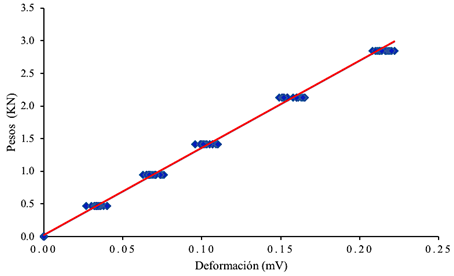
Figura 4: Curva de regresión de la carga aplicada en los sensores integrales del SIF y la deformación para un brazo de palanca de 0.70 m. Figure 4: Regression curve of the load applied to the integral sensors of the SIF and the deformation for a lever arm of 0.70 m.
El contraste de medias para las posiciones de los brazos de palanca, se muestra en el Cuadro 3, las cuales presentaron diferencias estadísticas significativas y un coeficiente de correlación r mayor a 0.95 en todas las posiciones del brazo de palanca.
Cuadro 3: Constantes de fuerzas-voltajes obtenidas en la calibración de los sensores integrales del SIF para los cinco diferentes brazos de palancas. Table 3: Force-voltage constants obtained in the calibration of the integral sensors of the SIF for the five different lever arms.
| Brazo de palanca | Coeficiente de correlación | Constante |
|---|---|---|
| m | kN V-1 | |
| 1.05 | 0.984 | 10.04 a † |
| 0.9 | 0.999 | 11.56 b |
| 0.8 | 0.984 | 11.72 b |
| 0.7 | 0.997 | 13.36 b |
| 0.6 | 0.986 | 14.13 d |
† Letras distintas en la misma columna indican diferencias estadísticas significativas, según la prueba de Tukey (P ≤ 0.05).
† Different letters in the same column indicate significant statistical differences, according to the Tukey test (P ≤ 0.05).
La tendencia de las constantes de fuerza-voltaje obtenidas fue inversamente proporcional a la longitud del brazo de palanca (Figura 5) con un coeficiente de determinación R2 de 0.96. Se observa que al incrementar el brazo de palanca, de 0.70 a 0.90 m la constante de fuerza-voltaje disminuye un 13.16%.
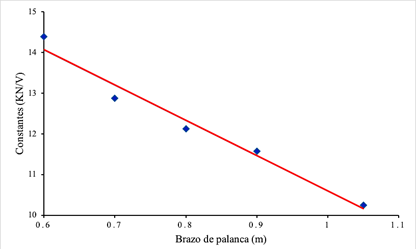
Figura 5: Curva de regresión de las constantes de fuerza-voltaje y la longitud del brazo de palanca. Figure 5: Regression curve of force-voltage constants and lever arm length.
El Cuadro 4 muestra el porciento del error detectado entre los voltajes promedio de los sensores integrales del SIF con respecto a los voltajes promedio de los sensores octagonales de referencia para una carga máxima de 2845 N. Este error mínimo obtenido fue de 2.37% para una longitud de brazo de palanca de 0.90 m e incrementando significativamente al disminuir o aumentar la longitud de este. Campos-Magaña et al. (2015a), McLaughlin et al. (2005) y Soliman (2015) detectaron en pruebas de laboratorio y evaluaciones de campo errores similares, sin embargo no mencionan las causas del mismo y las correcciones a este problema, lo cual dio origen a la realización de esta investigación.
Cuadro 4: Magnitud del error de los voltajes promedio de los sensores integrales y de los sensores octagonales de referencia al cambio de la longitud del brazo de palanca. Table 4: Magnitude of error of average voltages of integral sensors and of octagonal sensors of reference to change in lever arm length.
| Brazo de palanca | A | B | Error |
|---|---|---|---|
| m | - - - - - - volt - - - - - - | % | |
| 0.60 | 0.198 | 0.231 | -14.459 |
| 0.70 | 0.215 | 0.240 | -10.454 |
| 0.80 | 0.240 | 0.249 | -3.506 |
| 0.90 | 0.247 | 0.253 | -2.518 |
| 1.05 | 0.278 | 0.255 | 8.823 |
A: suma promedio de los voltajes de sensores integrales, B: suma de los promedios de los voltajes de los sensores de referencia.
A: average sum of the integral sensor voltages, B: sum of the average voltages of the reference sensors.
El comportamiento del error para cada posición de los brazos de palanca se muestra en la Figura 6. Se observa que el error mínimo obtenido de la fuerza resultante corresponde a la distancia del brazo de palanca de 0.90 m, e incrementó significativamente al disminuir o aumentar la longitud de este. Godwin y O’Dogherty (2007), evaluaron herramientas de trabajo de laboreo de suelos, con sensores con doble empotramiento, encontrando que no existe diferencia significativa entre las magnitudes de las fuerzas detectadas por efecto del cambio de posición de la fuerza resultante.
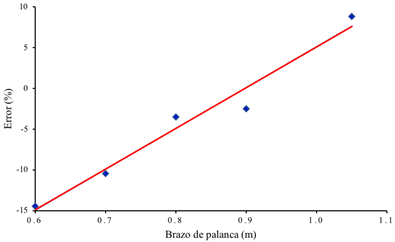
Figura 6: Magnitud del error, bajo condiciones de laboratorio, en función de la magnitud del brazo de palanca. Figure 6: Magnitude of the error, under laboratory conditions, as a function of the length of the lever arm.
Donde la estimación del error bajo condiciones de laboratorio entre arreglos de sensores, para un determinado brazo de palanca, se puede estimar empleando la siguiente Ecuación 1:
Estimación del Error en la Medición de las Fuerzas del SIF Bajo Condiciones de Campo
Los resultados de los distintos arreglos de cinceles trabajando en campo a diferentes profundidades se muestran en las Figuras 7 y 8, el comportamiento fue similar en la medición con los sensores integrales del SIF y sensores de referencia.
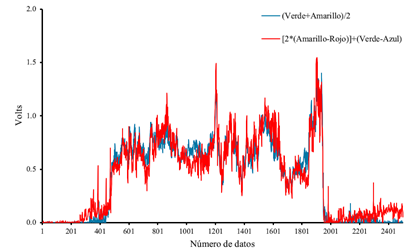
Figura 7: Contraste de los voltajes obtenidos entre la combinación de sensores (Ama+Ver)/2 contra 2*(Ama-Roj)+(Ver-Azul). Para un arreglo de trabajo de dos cinceles delanteros a 0.30 m y un cincel trasero a 0.30 m de profundidad. Figure 7: Contrast of the voltages obtained between the combination of sensors (Ama + See) / 2 Vs 2 * (Ama-Roj) + (Ver-Azul). For a working arrangement of two front chisels at 0.30 m and a rear chisel at 0.30 m depth.
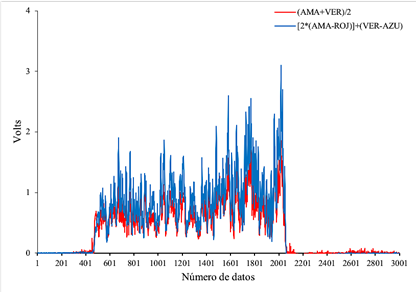
Figura 8: Contraste de los voltajes obtenidos entre la combinación de sensores (Ama+Ver)/2 contra 2*(Ama-Roj)+(Ver-Azul). Para un arreglo de trabajo de dos cinceles frontales a 0.20 m y un cincel trasero a 0.30 m de profundidad. Figure 8: Contrast of the voltages obtained between the combination of sensors (Ama + See) / 2 Vs 2 * (Ama-Roj) + (Ver-Azul). For a working arrangement of two front chisels at 0.20 m and a rear chisel at 0.30 m depth.
La estimación de la diferencia entre las mediciones del SIF con respecto a las mediciones de los sensores testigos se calcularon empleando la siguiente Ecuación 2:
donde: Volt A es igual al promedio de los voltajes de los sensores del SIF Amarillo y Verde.
Volt B es igual a la suma de los voltajes de los sensores testigo Amarillo-Rojo (dos veces) más el Verde Azul
El error detectado para cada uno de los cuatro arreglos de profundidad en ambos métodos de análisis se muestra en el Cuadro 5. El error mínimo obtenido fue del 8.15% para el arreglo de cinceles de 0.30-0.30 m y el error máximo fue de 42.35% para el arreglo de cinceles 0.20-0.40 m en los dos métodos de análisis utilizados.
Cuadro 5: Contraste de la medición del error mediante los métodos del área bajo la curva y el método espectral. Table 5: Measurement of error by area under the curve method contrasted with the spectral method.
| Profundidad de arreglos | Área bajo la curva | Espectral | ||||
|---|---|---|---|---|---|---|
| A | B | Error | C | D | Error | |
| m | V n | % | volt | % | ||
| 0.20-0.20 | 920.38 | 1325.05 | 30.66 | 0.67 | 0.98 | 31.51 |
| 0.30-0.30 | 999.78 | 868.55 | 15.19 | 0.82 | 0.76 | 8.15 |
| 0.20-0.30 | 1321.80 | 1892.23 | 29.88 | 0.86 | 1.24 | 31.18 |
| 0.20-0.40 | 1015.17 | 1776.98 | 41.10 | 0.85 | 1.54 | 42.35 |
A, C: (Amarillo + Verde) /2. B, D:2*(Amarillo-Rojo) + (Verde-Azul). V n Voltaje por el número de datos.
A, C: (Yellow + Green) / 2. B, D: 2 * (Yellow-Red) + (Green-Blue). V n Voltage by the number of data.
El análisis de varianza indicó que no existe diferencia significativa entre los métodos espectral y de área bajo la curva, para la estimación del error de medición de fuerzas entre los diferentes arreglos de los sensores que componen el SIF, comparado con los arreglos de los sensores de referencia tampoco se presentaron diferencias significativas en el monitoreo del error debido a los arreglos de los cuerpos de cinceles a diferentes profundidades de trabajo.
La comparación múltiple de medias (Cuadro 6) indicó que para la profundidad de trabajo 0.20-0.20 m y 0.20-0.30 m la magnitud del error fluctúa entre el 30 al 31%. El error mínimo fue obtenido cuando el implemento trabajó con herramientas de labranza del mismo tamaño de 0.70 m y a profundidades iguales (0.30-0.30) m en la parte delantera y trasera, con un error del 13.07% y reducido a 3.07% con el factor de corrección obtenido en las calibraciones de laboratorio. Para el arreglo de (0.20-0.40) m donde la profundidad de laboreo de la parte delantera del implemento es de 0.20 m diferente en las herramientas delantera y trasera, el error incremento significativamente. Este tipo de comportamiento no ha sido reportado en la literatura ya que registros solo se han hecho con cinceles trabajando a la misma profundidad (Cadena-Zapata et al., 2012; Abbaspour y Haghighat, 2011; Cheng et al., 2007). Lo que significa que para mediciones de fuerzas en cinceles a diferentes profundidades de laboreo los sistemas desarrollados a la fecha no son confiables.
Cuadro 6: Comparación de medias del error obtenidos en los métodos espectral y área bajo la curva para cuatro arreglos de laboreo en las evaluaciones de campo. Table 6: Comparison of error means obtained in the spectral methods and area under the curve for four tillage arrangements in the field evaluations.
| Arreglo de profundidad de laboreo | Error |
|---|---|
| m | % |
| 0.20-0.40 | 41.72 a † |
| 0.20-0.20 | 31.08 b |
| 0.20-0.30 | 30.53 b |
| 0.30-0.30 | 13.07 c |
† Letras distintas en la misma columna indican diferencias significativas, según la prueba de Tukey (P ≤ 0.05).
† Different letters in the same column indicate significant differences, according to the Tukey test (P ≤ 0.05).
Estudios realizados por varios autores (Cadena-Zapata et al., 2012) muestran que se puede reducir hasta un 45% la fuerza especifica requerida para laboreo (kNm-2) cuando se aplica la teoría de la profundidad critica (Godwin y O’Dogherty, 2007), donde se utilizan cinceles frontales someros trabajando a la profundidad crítica y cinceles traseros trabajando a la profundidad de trabajo requerida. Lo que significa que se requiere mejorar la confiabilidad de transductores para la medición de fuerzas en las operaciones de labranza empleando implementos integrales.
Esto indica claramente que el banco de pruebas construido y mostrado en la Figura 1 requiere de modificaciones que contemple todas las combinaciones de fuerzas y momentos posibles que actúan en este sistema complejo de laboreo.
CONCLUSIONES
- Para el rango de profundidades de calibración del SIF se observó que este se ve afectado en su confiabilidad de medición obteniéndose las ecuaciones de corrección correspondientes para elevar dicha confiabilidad a niveles aceptables.
- Para la evaluación del SIF en campo el menor error detectado ocurre cuando el implemento trabaja con cinceles de igual tamaño y a profundidades de trabajo iguales en la parte delantera y trasera del implemento y este error se ve minimizado aplicando la ecuación de corrección obtenida en laboratorio.
- Se requiere del rediseño del banco de pruebas que permita hacer todas las combinaciones posibles de arreglos y así poder determinar las ecuaciones que permitan reducir al máximo el error de medición entre los sensores testigo contra los sensores que integran el SIF.

