











 text new page (beta)
text new page (beta) English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1. Introduction
In the last decade, the interest on magnetohydrodynamic (MHD) electrical generators has been renewed due to its potential applications as converters of acoustic [1,2 ] and ocean wave energy . A MHD generator is a device that converts the kinetic energy [3,4 ] of an electrically conducting fluid, for instance a liquid metal, into electrical energy through the interaction with a magnetic field. A common MHD generator consists of a duct with a rectangular cross-section immersed in a static magnetic field that is transverse to a pair of insulating walls. The walls parallel to the applied field are electrical conductors (electrodes). When a conducting fluid flows inside the duct, its motion within the imposed magnetic field induces an electrical current perpendicular to both the fluid motion and the applied field that can be extracted through the electrodes connected to an external load. If the fluid motion is unidirectional, a DC current is induced while, if the fluid moves in oscillatory motion, an AC current is generated. In this way, the kinetic energy of the fluid is converted directly into electrical energy without the need of mechanical parts. DC MHD generators were the first to be developed, particularly at high temperatures using plasma as a working fluid [5]. In the late eighties a proposal was made at Los Alamos National Laboratory to transform acoustic power into electrical power through a liquid metal MHD acoustic transducer [6]. In these devices, the thermoacoustic effect is used to generate an oscillatory motion of a conducting fluid in a duct immersed in an applied transverse magnetic field [2,7,8 ]. Alternate liquid metal MHD generators were later proposed to convert the oscillatory motion of ocean waves into electricity [9-11].
A full evaluation of the performance of liquid metal MHD generators should rely on a detailed analysis of the dynamics of the oscillatory flow interacting with a magnetic field. In contrast with steady MHD duct flows that have been widely studied experimentally and theoretically [12], oscillatory MHD flows have been much less explored [13]. In this paper, we use a two-dimensional model of an MHD generator to investigate analytically the laminar liquid metal flow created by an oscillatory pressure gradient (for instance, produced by either thermoacoustic effect or ocean waves) imposed at the extremes of the generator duct. We analyze the flow in two different regions. First, we consider the region far from the edges of the generator where the magnetic field is uniform. With the aim of understanding the interplay of the imposed pressure gradient and the braking Lorentz force created by the interaction of the induced current with the applied magnetic field, asymptotic solutions are derived in the limits of low and high oscillating frequencies. The second analyzed flow region is where the applied magnetic field is non-uniform, that is, the region where the flow enters or leaves the applied magnetic field. Several studies have addressed the MHD unidirectional flow in this region (see for instance [14,15]), however, it appears that the oscillatory MHD duct flow in a fringing magnetic field has not been previously considered. Assuming high oscillation frequencies, we pay a particular attention to the behavior of the oscillatory boundary layers immersed in the spatially varying magnetic field. These layers, which are a combination of the Stokes and Hartmann layers, determine the flow dynamics to a large extent. Using a perturbation solution, it is found that non-linear effects give rise to steady streaming vortices in the fringing magnetic field. The effect that these vortices may have on the overall performance of the generator is discussed.
2. Oscillatory flow in an MHD generator
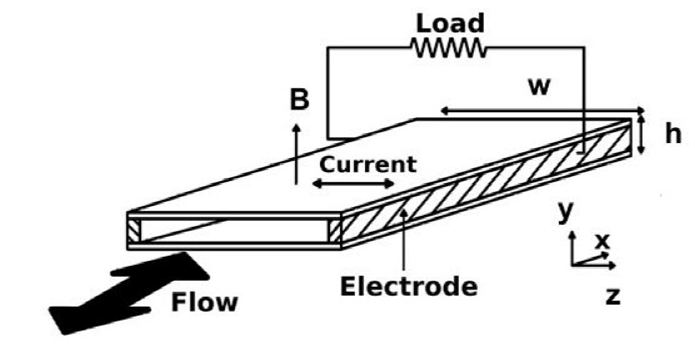
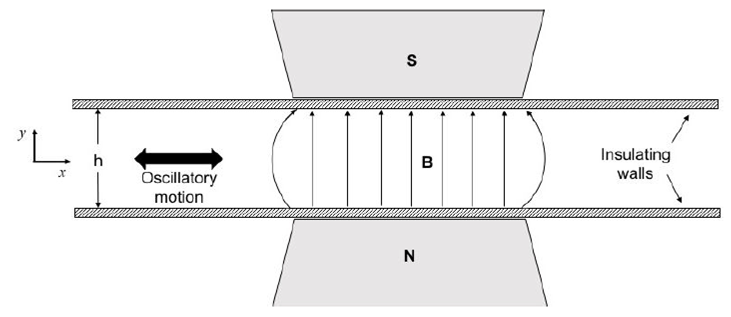
We consider the oscillatory flow of a liquid metal in a duct of rectangular cross-section under a transverse magnetic field. The walls perpendicular to the applied field are electrical insulators, while those parallel to the field are perfect conductors connected to an external load (see Fig. 1). The oscillatory flow is driven by a zero mean, time-periodic pressure gradient imposed at the extremes of the duct.
The system of equations that govern the unsteady flow of an incompressible, electrically conducting viscous fluid in the presence of a magnetic field are the continuity equation, Navier-Stokes equation, Faraday’s law of induction, Ampère’s law, Gauss’s law for the magnetic field and Ohm’s law which, respectively, can be conveniently written in the following dimensionless form
where the flow velocity \
Further, the dimensionless parameters
The oscillatory motion of the fluid inside the magnetic field induces an electric
current density in the spanwise (
3. Flow in the uniform magnetic field region
We now assume that the aspect ratio of the generator is very large, that is,
We now restrict to the region where the applied field is uniform so that, in
dimensionless terms,
We disregard transient solutions and consider that the harmonic axial pressure
gradient that drives the flow is given by the real part of
where
In the present work the attention is focused in the interplay of inertia and the
braking Lorentz force. The explicit form of the velocity profile (6) is, however, not particularly
insightful. In order to get a better understanding of the physical behavior of this
oscillatory MHD flow, we look for asymptotic solutions in the limits
3.1 Low-frequency solution:
In the low frequency limit it is possible to obtain a regular asymptotic solution
in the flow domain [18]. Since we are
interested in the limit when
Substituting the harmonic pressure gradient and assuming solutions given as the
real part of the expressions
and solve the corresponding equations with no-slip boundary conditions at each
order on the parameter
where
which shows an in-phase Poiseuille flow contribution. The phase angle between the pressure gradient and the velocity is given by
Note that when
3.2 High-frequency solution:
At high frequencies a uniform asymptotic solution for the whole domain does not
exist. Therefore, matching asymptotic solutions in the core and the boundary
layer has to be sought. For the core, we start from Eq.(5) and introduce the variables
We now look for a solution
Here, we assume that
This represents a uniform time-periodic flow that lags behind the imposed
pressure gradient according to the value of
Let us now consider the boundary layer flow. We introduce the stretched variable
for the corresponding function
where
The phase angle between the boundary layer and the pressure gradient is given by
Again, in-phase and out-of-phase contributions are obtained in the boundary
layer, the structure of which depends on the value of
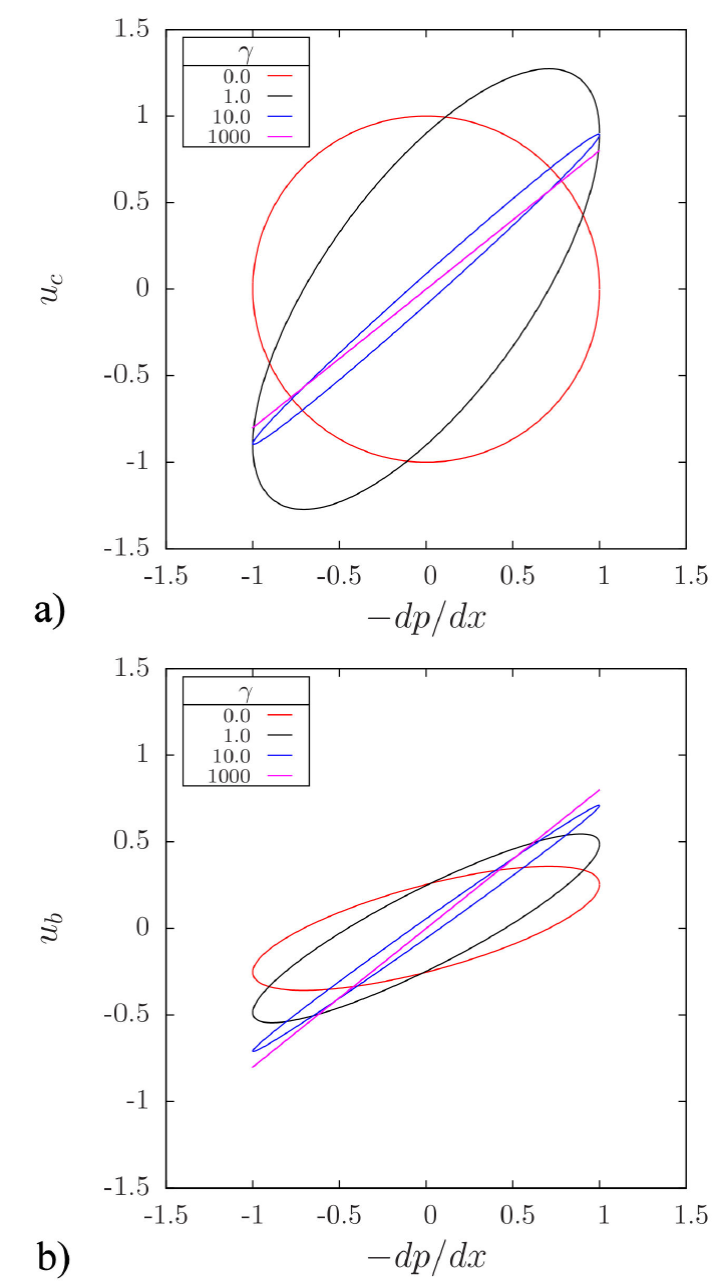
An illustrative way of visualizing the phase lag produced by the Lorentz force
between the velocity and the pressure gradient is by noticing that these
quantities satisfy the parametric equations of an ellipse in the plane
where
4. Flow in the non-uniform magnetic field region
In this section, we address the oscillatory flow of the liquid metal close to the
edges of the magnets where the magnetic field is non-uniform. In this region, the
transverse magnetic field varies from its maximum strength to zero as the
As in Sec. 3, we consider the oscillatory motion of the liquid metal limited by two
infinite insulating plane walls at rest under a transverse magnetic field. We are
now focused on the region close to the edges of the magnets, so the transverse
magnetic field is expressed in the form
Here
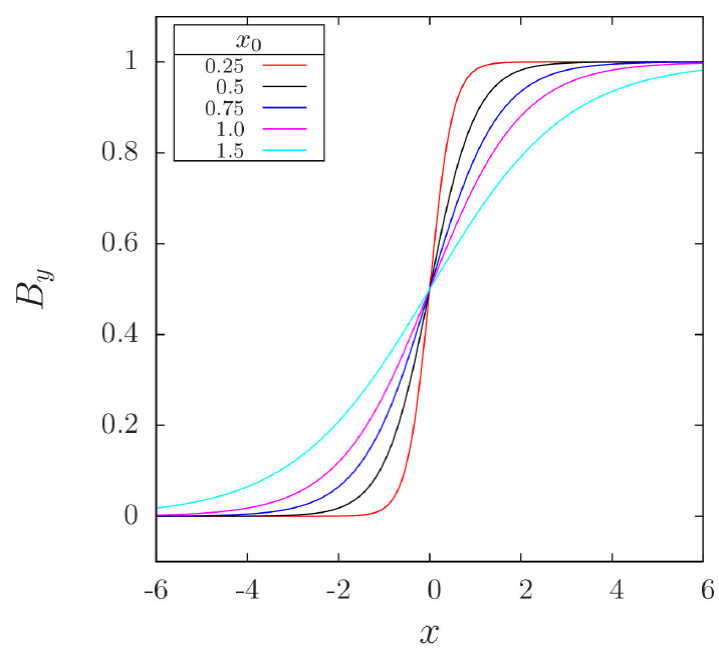
FIGURE 4 Dimensionless applied magnetic field distribution as a function of the axial coordinate x in the magnet edge region for different values of the x0 parameter.
We assume that as a result of the imposed pressure gradient, beyond the boundary
layer (outer flow) the fluid oscillates irrotationally with a zero-mean in the axial
direction so that the corresponding velocity component in dimensionless form can be
expressed as the real part of
where the outer velocity
These dimensionless parameters estimate, respectively, the ratio of the amplitude of
the oscillation to the characteristic length
From Eqs. (21) and (22), the explicit form of the function
where the harmonic variation of the electric field was assumed.
In turn, the inner layer flow is governed by the equations:
where
where (28) and (29) represent the no-slip condition of the velocity components at the wall and (30) is the matching condition for the inner and outer flows.
4.1 First order solution
We now look for a solution of the boundary layer problem as a perturbation
expansion in the small parameter
where
where the first and second approximations are denoted, respectively, by
subindexes 0 and 1. By eliminating the pressure gradient and current densities
in Eq.(26) with the substitution of Eqs.
(21), (22), (27), and using (31) and (32), we find that
with boundary conditions
Assuming that
the function
with boundary conditions
The solution of (38) that satisfies conditions (39) is
where
From the solution(40) it is
possible to estimate the thickness of the Stokes-Hartmann boundary layer,
namely,
which coincide with the ordinary hydrodynamic limit [21], where
4.2 Second order approximation
The equation for the second order approximation
Note that the products of the harmonic functions and derivatives on the
right-hand side of (41) introduce
terms proportional to
where the real part of
with boundary conditions
The solution is given in the form
with
The constants
Solution (45) correctly recovers the hydrodynamic solution [21] when the magnetic field strength tends to zero. Particularly, the contribution to the tangential velocity reduces to
In turn, the boundary value problem satisfied by the steady state part,
where conjugate complex quantities are denoted by an overbar and
where constants
In the boundary layer, the second order steady velocity component parallel to the wall is given by
where
In this way, the steady streaming flow goes beyond the boundary layer,
penetrating into the potential flow. The finite velocity at the edge of the
boundary layer can be used as the inner boundary condition for the outer flow
[25]. Although far form the magnet
edges
Unlike the hydrodynamic case, when a magnetic field is present the steady
solution (50) does satisfy the
vanishing of the streaming flow as the distance from the walls tends to infinity
[26]. This means that the streaming
motion does not penetrate from the boundary layer into the potential flow. Figure 5 shows the contribution to the
tangential velocity
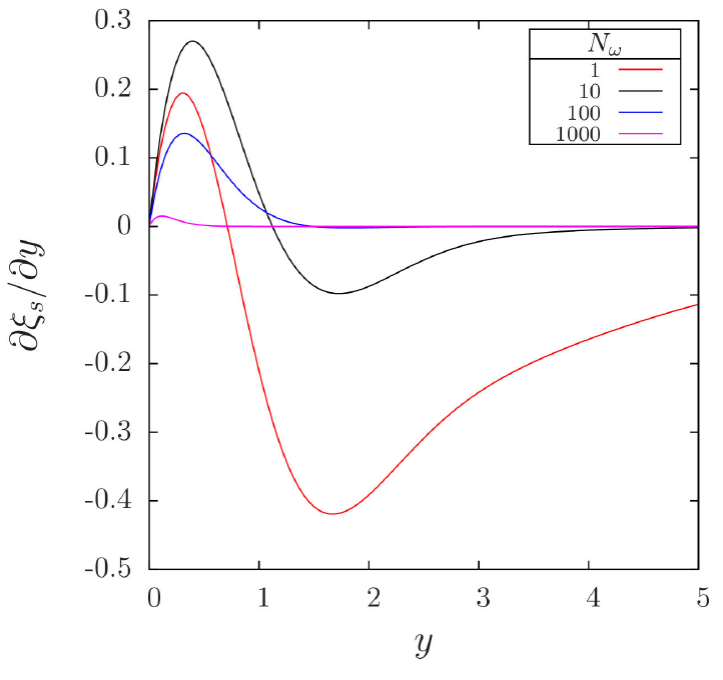
FIGURE 5
The steady part of the stream function,
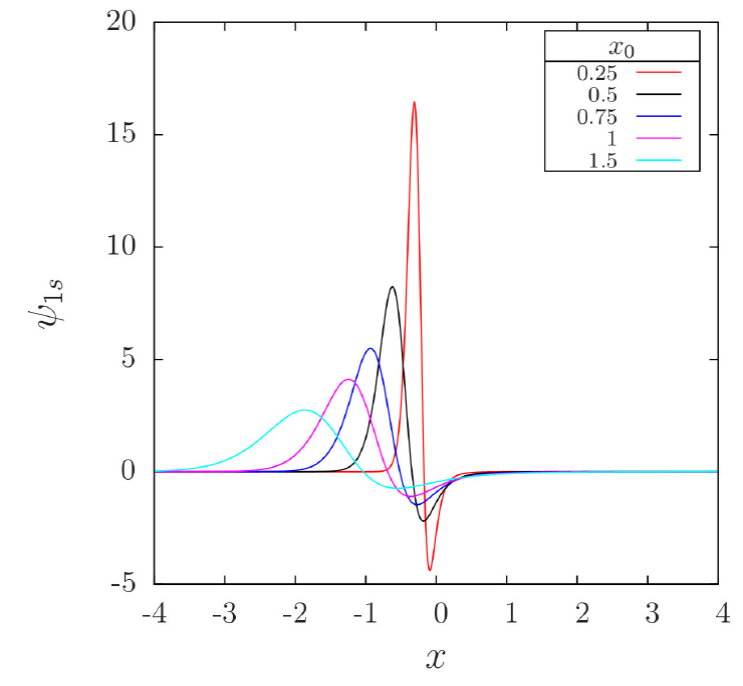
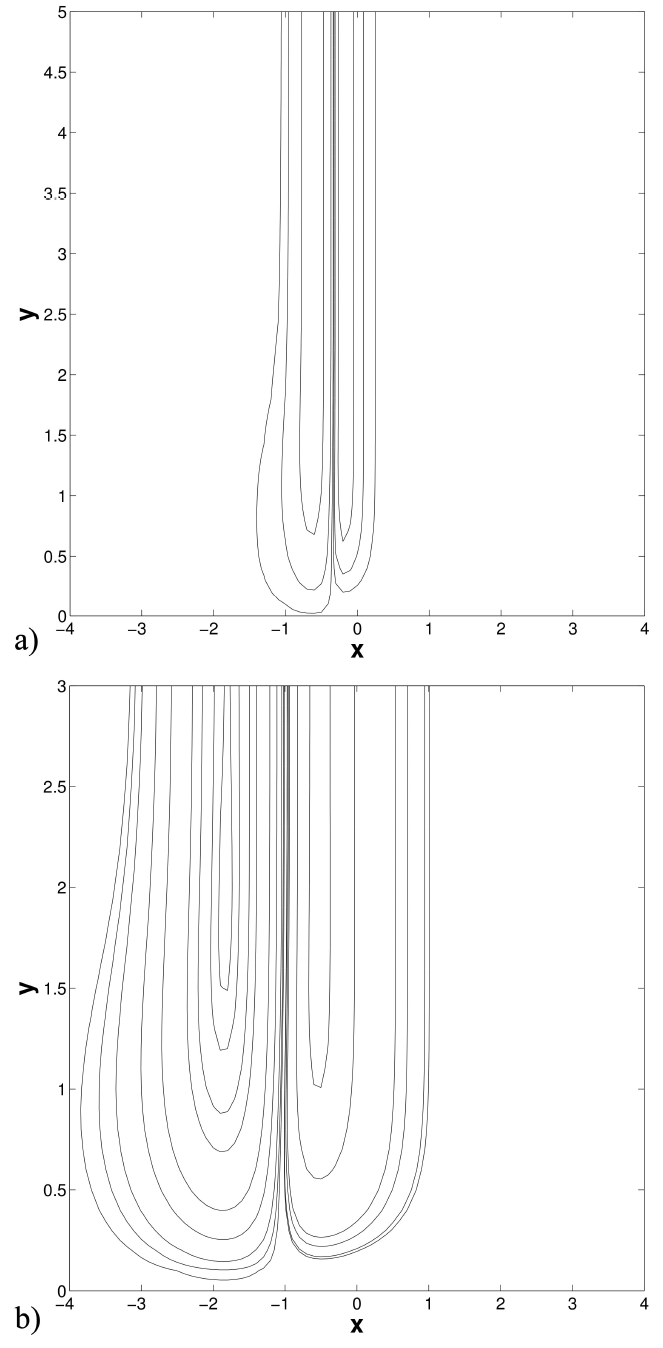
FIGURE 6 Steady part of the stream function,
In Fig. 7, the streamlines in the fringing
field region are displayed for the cases
5. Concluding remarks
We have explored the zero-mean oscillatory two-dimensional flow of a liquid metal in
an alternate MHD generator driven by an imposed harmonic pressure gradient. The
finite extension of the applied magnetic field transverse to the electrically
insulating duct walls was considered for the analysis of the flow behavior. In the
uniform field region, characteristic flows were explored through asymptotic
solutions for a small (
The analysis of the entrance oscillatory flow in the fringing field region at the edges of the MHD generator was carried out for high oscillation frequencies using a perturbation method, assuming the small amplitude of oscillation approximation. From the first order solution, the thickness of the boundary layer was estimated, and it resulted a combination of the Stokes and Hartmann layers, each of which are recovered in the corresponding limits. The second order solution revealed that, superimposed to the primary oscillatory flow, a secondary flow composed by a time periodic motion oscillating with twice the original frequency and a steady streaming contribution exist. A pair of steady streaming vortices emerges in the fringing field region as a consequence of non-linear effects caused by the spatial variation of the magnetic field. The extension and intensity of the vortices grow as the magnetic field gradient increases. Unlike the hydrodynamic case, these vortices do not penetrate into the potential flow but remain confined in the boundary layer and, moreover, their strength decreases as the magnetic field becomes stronger. Although the disturbance created by the steady streaming vortices is not expected to affect the performance of the MHD generator, one could conveniently consider a smooth magnetic field gradient for design purposes.

