










Servicios Personalizados
Revista
Articulo
 Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkIngeniería mecánica, tecnología y desarrollo
versión impresa ISSN 1665-7381
Ingenier. mecáni. tecnolog. desarroll vol.3 no.2 México mar. 2009
Artículos
Vehículo robótico: autónomo y teleoperado con una PDA
Villa-Medina Francisco, * Gutiérrez Joaquín y Porta-Gándara Miguel Ángel
Grupo Ingeniería Centro de Investigaciones Biológicas del Noroeste S.C. Mar Bermejo 195, La Paz 23070, BCS, México * joaquing04@cibnor.mx , Teléfono: 52-612-1238422
Fecha de recepción: 08-12-08
Fecha de aceptación: 30-01-09
Resumen
Se presenta un vehículo robótico terrestre de cuatro ruedas para hacer recorridos sistemáticos de manera autónoma, con un algoritmo de navegación basado en la información de un compás electrónico y un codificador óptico. También cuenta con un sensor ultrasónico para evitar colisiones con objetos en la ruta del vehículo. Por medio de un panel de control con una interfaz gráfica de usuario (GUI), programada en una asistente digital personal (PDA), se trasmiten al vehículo una serie de puntos que forman el recorrido deseado. Los puntos se marcan en un espacio virtual en la GUI que representa la zona de trabajo del vehículo. La comunicación entre el robot y el panel de control, es un enlace bidireccional de radiofrecuencia mediante radio módems que permiten el intercambio de información.
El vehículo robótico puede ser teleoperado de manera manual, en este caso la PDA se convierte en un control remoto convencional. El cambio de modo entre autónomo y manual puede hacerse en cualquier momento.
Una aplicación del vehículo robótico es para analizar la factibilidad de un algoritmo de navegación basado en información redundante de dos sistemas de posicionamiento global (GPS). El vehículo se probó por medio de tareas de recorrido predefinidas en modo autónomo, así como recorridos controlados por un operador. Los resultados muestran que la arquitectura implementada es confiable, robusta y sirve para realizar recorridos sistemáticos en diversas aplicaciones.
Palabras clave: PDA, vehículo autónomo, robótico, teleoperación, antenas de GPS.
Abstract
A four wheeled land robotic vehicle (RV) has been developed in order to perform autonomous systematic routes. The navigation track is accomplished with the information provided by an odometer and an electronic compass. The RV is equipped with an electronic ultrasonic sensor for obstacle detection. The coordinates of the designed track are set in a virtual space with several points which represents the work space. These points are transmitted from the control panel to the RV with a personal digital assistant (PDA) using a graphic user interface (GUI). The communication between the RV and the control panel is achieved with a bidirectional radio modem link.
The RV can also be operated manually; in this case the PDA is used like a conventional remote control. The RV operation mode can be changed at any time. The robotic vehicle was tested in a basket ball court in the autonomous and manually operation modes. One application for this RV is to analyze the viability of a navigation algorithm based on two orthogonal positioning GPS antennas. Results show that the RV is a trusty and reliable tool to perform systematic routes.
Keywords: PDA, robotic vehicle, GPS atennas.
Introducción
Los robots son la integración de partes mecánicas, electrónicas y sistemas de información, desarrollados con un propósito específico, principalmente la manipulación de objetos así como la exploración del ambiente y recopilación de datos. En años recientes, ha aumentado el desarrollo de vehículos robóticos, en respuesta a la necesidad de realizar trabajos que resultan riesgosos para el hombre. Estos robots han sido desarrollados con base en las especificaciones de la tarea a realizar y de las condiciones del ambiente de trabajo (Durrant-Whyte, 2001 y Brooks,1 985).
Los vehículos robóticos interactúan en ambientes con obstáculos tanto estáticos como dinámicos; si es un ambiente conocido, es posible desarrollar trayectorias fijas que evadan obstáculos, pero esto resulta inútil cuando la información del área de trabajo es insuficiente o se trabaja en lugares cambiantes, donde la trayectoria inicial es modificada constantemente y la planeación inicial ya no es aceptable (Bourdon y Ruaux, 1995). Para estos casos, se propone un esquema de supervisión o teleoperación para mantener el control del robot o bien para cambiar acciones o rutas, por lo tanto es necesaria la intervención humana o bien de algún otro robot de tipo supervisor (Eicker, 2001).
Existen diferentes sistemas para la teleoperación de vehículos (Fong y Thorpe, 2001 y Hine et al., 1995), desde complejas salas especializadas de control hasta los enlaces de radiofrecuencia unidireccional, tales como los utilizados en aeromodelismo. Otros emplean computadoras personales, lo que resulta una opción viable por su capacidad de procesamiento, pero limitado en cuanto a movilidad y autonomía para el usuario.
Una alternativa que satisface las necesidades de teleoperación, en cuanto a procesamiento, movilidad y autonomía son las PDA y los teléfonos celulares multimedia, entre otros (Fong et al., 2003 ). Con estos equipos es posible mantener una comunicación bidireccional entre un robot móvil y el usuario.
El sistema desarrollado para la teleoperación de un vehículo robótico (VR) basado en una PDA para su control y supervisión es presentado, así como los resultados obtenidos en su operación, tanto de manera autónoma como manual. La arquitectura del móvil se basa en un enfoque modular del tipo maestro-esclavo para su operación, tanto en sus componentes lógicos (software) como en sus componentes físicos (hardware), para permitir su adaptación en diversas aplicaciones.
El vehículo se opera para realizar recorridos sistemáticos, con lo cual se busca caracterizar un algoritmo de navegación basado en la configuración ortogonal de las antenas de dos sistemas de posicionamiento global (GPS). El objetivo es desarrollar un sistema de posicionamiento confiable dentro de un error de ± 4 m para las condiciones geográficas del sur de la península de Baja California, debido a la carencia de radiofaros, que impiden usar el sistema de posicionamiento diferencial (DGPS).
Esta configuración de las antenas es para obtener una mejor recepción de la señal de los satélites por uno de los dos GPS, independientemente de la orientación del vehículo, ya que en un instante dado, una de las dos antenas recibe mejor señal.
Descripción del Sistema
El sistema consta de dos unidades, el vehículo robótico y el panel de control (Fig.1), conectadas por medio de un enlace bidireccional de radiofrecuencia, que permite la transferencia de información para la operación y evaluación del recorrido
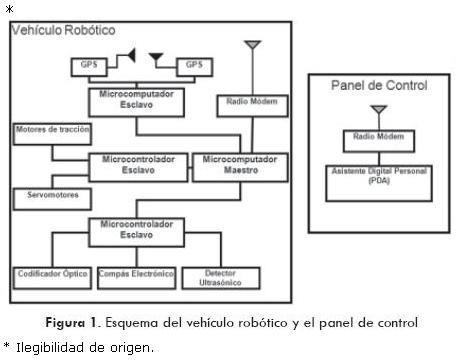
Vehículo Robótico
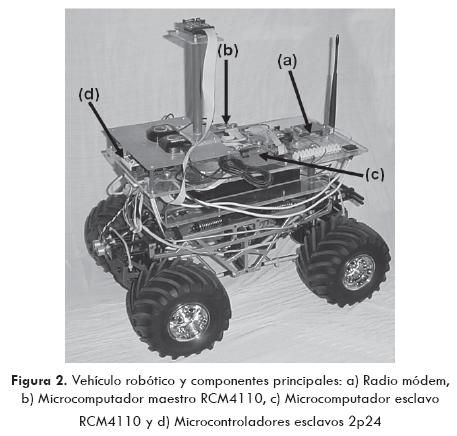
La implementación del VR se realiza con base en la plataforma móvil de un carro eléctrico a escala 1:10 de la marca TAMIYA®, modelo TXT-1. Se trata de un carro todo terreno con tracción en las cuatro ruedas, impulsado por dos motores de corriente directa en paralelo para el avance y retroceso. Esta plataforma cuenta con un mecanismo de dirección tipo Ackermann para el eje anterior y otro en el eje posterior, controlados cada uno por un servomotor (Campion et al, 1996 y Large et al., 2000).
Para la comunicación con el panel de control se usa un radio módem conectado a un microcomputador maestro, que a su vez gobierna a tres microcomputadores esclavos, que se encargan del control y el procesamiento de información (Fig. 2).
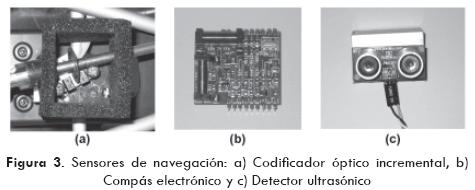
El vehículo cuenta con diversos sensores para navegación y control (Everett, 1995), los cuales son seleccionados de acuerdo a las especificaciones de la tarea a desarrollar. Para efectuar el recorrido sistemático, el vehículo se equipó con tres sensores: un codificador óptico incremental, un compás electrónico (magnetómetro) y un detector ultrasónico empleado como sodar (Fig. 3).
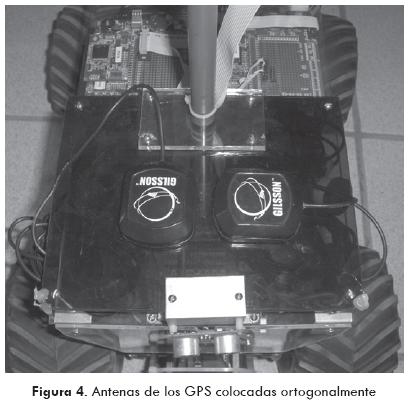
El vehículo lleva abordo dos sistemas de posicionamiento global (Parkinson y Spiker, 1996), que permiten tener la información redundante de la posición geográfica, con dos antenas de alta ganancia colocadas ortogonalmente (Fig. 4), en la que una de las dos señales recibidas es de mejor calidad que la otra.
Radio módem
Para establecer la comunicación inalámbrica se usa un radio módem marca MaxStream® modelo 9XTend a una frecuencia de 900 MHz, que permite tener una cobertura de hasta 64 km, de acuerdo a la potencia programable de salida desde 1 mW hasta 1 W. La máxima velocidad de transferencia de datos es de 115 kbps. La comunicación con el microcomputador maestro es a través de un puerto serie RS232-C.
Microcomputador maestro
Es un microcomputador con operación de multitareas, marca Rabbit Semiconductor®, modelo RCM41 10, que opera a 29.49 MHz, con 512 kb de memoria flash para almacenar el código y 256 kb de memoria RAM. Tiene 6 puertos que sirven para diferentes funciones, de las que destacan la comunicación serial síncrona y asíncrona y la modulación por ancho de pulso (PWM), entre otras. El lenguaje de programación es una variante del lenguaje C, denominado Dynamic-C. La programación del microcontrolador se hace a través de un puerto serial RS232-C.
Desarrolla la función de maestro para coordinar las tareas de tres microcomputadores esclavos, así como el análisis de comandos provenientes del panel de control, como por ejemplo el accionar motores o detenerlos.
Este microcomputador maestro decodifica los comandos en acciones de movimiento para motores y servomotores, procesa la información de los sensores y trasmite la información ordenada vía el radio módem al panel de control, que incluye además las lecturas de los GPS con la posición del vehículo. Microcomputadores esclavos
Esta parte del sistema consiste en un microcomputador RCM41 10 y dos microcontroladores Basic Stamp modelo 2p24 de la marca Parallax®.
El esclavo RCM41 10 es utilizado para recibir la información de latitud y longitud, así como el tiempo universal coordinado (UTC) de cada uno de los GPS cada segundo y transfiere al maestro estos datos. Los GPS son de la marca Garmin® modelo 15L. La comunicación es serial tipo RS232-C. Se usan dos antenas de alta ganancia colocadas ortogonalmente.
Los esclavos 2p24 operan a una frecuencia de 20 MHz, cuentan con 16 puertos bidireccionales de un bit cada uno, una memoria RAM de 38 bytes, y 2 kb de EEPROM para el código. El lenguaje de programación es el PBASIC, similar al BASIC tradicional. Sin embargo tiene instrucciones con protocolos de comunicación de alto nivel, como el 1-wire o el I2C.
Un microcontrolador esclavo 2p24 es encargado de manejar específicamente la operación de los motores de tracción y los servomotores de dirección (anterior y posterior). Recibe del maestro los valores adecuados para controlar tanto la velocidad de los motores, como el ángulo de giro de ambas direcciones, que corresponde al modelo cinemático de doble Ackermann, donde la dirección anterior debe girar al mismo ángulo que la posterior pero en sentido opuesto.
El otro esclavo 2p24 se emplea para recibir los datos de los tres sensores con los que cuenta el VR de manera secuencial. Inicia con el conteo del codificador óptico, procede a leer la orientación del compás, y finalmente calcula la distancia de los obstáculos detectados por el sensor ultrasónico. Esta información es enviada al maestro para su procesamiento.
Codificador óptico
El codificador óptico incremental permite medir la velocidad y estimar el desplazamiento, por medio del muestreo de un tren de pulsos generados a la salida del sensor. La velocidad del movimiento es directamente proporcional a la frecuencia de la señal generada por el codificador , que consiste en una rueda dentada la cual gira con el eje de la trasmisión del vehículo. Los dientes de la rueda al girar entre un optoacoplador generan el tren de pulsos.
Al conocer a cuantos pulsos equivale una revolución de la llanta (R) y al medir entonces en un cierto periodo el número de pulsos de salida del codificador (F), y dado que se conoce el perímetro (P) de la llanta, se puede calcular la velocidad (V):

Con el tiempo de muestreo (t), se estima la distancia (d) recorrida por el vehículo:
d=V·t
Compás electrónico
La orientación del vehículo se estima por medio de un compás digital marca PNI® modelo Vector 2X, compuesto por un magnetómetro con dos sensores perpendiculares que miden el campo magnético en un sólo plano. Para calcular el acimut, el compás debe medir el campo magnético de la Tierra en un plano nivelado. El dato de salida del compás indica la orientación en grados con respecto al norte magnético. La resolución del compás es de 1 °, con una precisión de ± 2°, y la frecuencia de muestreo es de 5 lecturas cada segundo. Debido a que la salida del compás es modificada por la influencia de metales, se coloca en un poste de plástico de 0.2 m de altura sobre la plataforma del vehículo.
Detector ultrasónico
El VR lleva un sonar con dos transductores ultrasónicos, uno como trasmisor para emitir un tren de pulsos y el otro como receptor para captar los ecos, si un obstáculo es detectado. El sodar es el modelo Ping de la marca Parallax®, con un rango de detección entre 0.02 y 3 m.
El trasmisor genera un tren de pulsos a una frecuencia de 40 kHz y con base en el tiempo que tarda en recibirse el eco, se calcula la distancia hasta el obstáculo. La distancia (d0) es:

donde (c) es la velocidad del sonido en el aire, (t0) el tiempo transcurrido entre los pulsos de salida y el eco, lo que se denomina tiempo de vuelo.
Panel de Control
El panel de control está integrado por una PDA modelo iPAQ hx2790 de la marca HP® como componente de proceso y almacenaje, además de un radio módem 9XTend (Fig. 5), que se comunican a través del puerto de sincronización de la PDA y el puerto serie del radio módem.

El funcionamiento lógico en la PDA se divide en dos secciones, la atención de solicitudes procedentes del usuario y la recepción de datos provenientes del VR. La programación es desarrollada en la plataforma Visual Studio 2005, en el lenguaje C#.
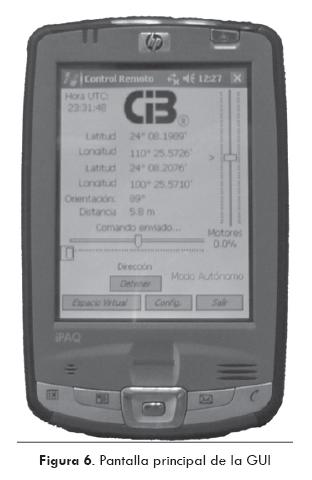
Se programa una interfaz gráfica de usuario (GUI), con la finalidad de simplificar la generación de comandos de control para el VR (Fig. 6). Se implementa, además, una bitácora donde se registra en forma de lista la fecha y hora de los comandos enviados. Se genera un archivo de texto en el que se agrega una línea por cada suceso, y un archivo más es generado para registrar los datos provenientes del VR, como son las lecturas de los sensores y de los GPS para su análisis posterior, estos datos se presentan en la GUI en tiempo real.
Teleoperación
El VR puede ser operado para efectuar recorridos por medio de un algoritmo de navegación (Fig. 7) de dos maneras diferentes: autónoma y manual. Por medio del panel de control se selecciona el modo de operación, y es posible cambiar de un modo al otro en cualquier momento. Cuenta con la función de detección de obstáculos.
Modo autónomo
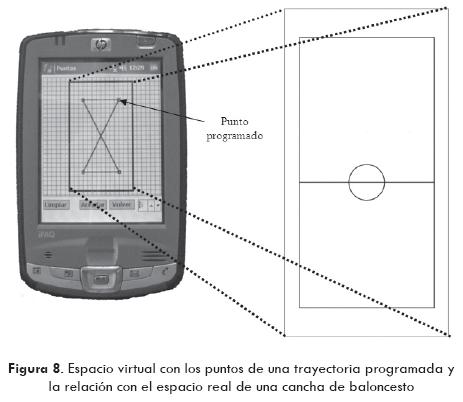
En la PDA se genera un espacio virtual, que representa la zona de trabajo del VR, donde se establece el recorrido que consiste en dos o más puntos seleccionados por medio del lápiz (Fig. 8). Para ir de un punto a otro, se requiere conocer la distancia entre los puntos, además de la orientación de la recta que los une, ambos parámetros son calculados por la GUI de manera automática. Esta información es enviada al VR, el cual toma el control e inicia las acciones necesarias para recorrer la trayectoria al primer punto destino, gira hasta posicionarse en la orientación correcta al punto, y cuando encuentra la orientación correcta, avanza en línea recta hasta recorrer la distancia correspondiente. De manera similar se recorre el resto de los puntos marcados.
A partir de la información de cada punto, el VR calcula el ángulo de la dirección de las llantas y la velocidad para los motores de tracción. El control de dirección se efectúa con base en la orientación de salida del compás para estimar el ángulo de la dirección de la llanta. La velocidad se estima con base en el conteo de los pulsos generados por el codificador óptico incremental, con relación al movimiento de las llantas. El control de la velocidad se encuentra entre 0.04 y 1.5 m/s, para poder registrar suficientes datos de GPS, con el objetivo de tener una trayectoria definida por un dato por metro.
Modo manual
En este caso el panel de control se usa como un control remoto convencional. Para guiar al VR a una posición deseada, puede hacerse mediante el teclado de la PDA. Otra opción es usar la pantalla con los controles virtuales, para seleccionar la velocidad y la dirección de las llantas.
En este modo la información pasa de manera directa al esclavo correspondiente, sin ningún cálculo, donde el lazo de control de la velocidad y dirección correspondientes es cerrado por el operador del VR.
Detección de obstáculos
Esta función se usa en ambos modos de operación con la finalidad de evitar colisiones entre el VR y algún objeto que se encuentre en su trayectoria. La detección se efectúa cuando el VR avanza hacia adelante, con base en la medición del detector ultrasónico, que es cada 2 Hz aproximadamente. Cuando un eco es detectado en la proximidad de 0.3 m el VR se detiene, si el objeto desaparece de la trayectoria, entonces el VR continúa su recorrido.
Resultados
El VR se colocó en un punto fijo y se registraron cada segundo las coordenadas a lo largo de 330 s, utilizando un GPS para caracterizar el comportamiento de la señal al girar 90° su antena de alta ganancia (Fig. 9). La antena se mantuvo durante 160 segundos orientada al Norte y después se giró al Este, como se puede apreciar, tanto en la longitud como en la latitud, la señal experimenta un deterioro con esta última orientación.
Se realizaron diversos recorridos con el VR en una cancha de básquetbol para evaluar su desempeño. Se probó el esquema de teleoperación en modo autónomo y manual, así como la detección de obstáculos y el desempeño en terreno irregular. Se plantearon diferentes recorridos donde el vehículo realizó un circuito cerrado.
La trayectoria de uno de los circuitos cerrados tiene 5 puntos, formando un rectángulo de 8 x 1 6 m. El VR se orientó al Norte y el punto de salida seleccionado fue el punto inferior izquierdo, el recorrido se llevo a cabo varias ocasiones a velocidad de 0.8 m/s y 0.4 m/s. En la figura 10 se muestra la trayectoria realizada por el VR en conjunto con la trayectoria programada usando la primera velocidad, en la figura 11, se muestra el resultado con la segunda velocidad.
Otra trayectoria considerada en forma de equis cerrada por la parte superior e inferior, el punto de partida es con el punto inferior izquierdo con orientación al Este. La figura 12 se muestra el resultado obtenido respecto a la trayectoria programada a una velocidad de 0.8 m/s. La figura 13 corresponde al resultado a velocidad de 0.4 m/s, con el mismo punto de partida y trayectoria anterior.
Para verificar que la posición geográfica puede medirse dentro de un margen de ± 4 m, se estableció una trayectoria circular, por fuera del circulo central de la cancha de básquetbol, la figura 14 muestra el recorrido comparado con un círculo de 5 m de diámetro, a una velocidad de 0.8 m/s.
La función de detección de obstáculos, (Fig. 15), se probó tanto en modo autónomo como manual. En ambos casos el VR se frenó de acuerdo a lo esperado, incluso a la máxima velocidad manual de 1.5 m/s aproximadamente, que es una velocidad segura para poder controlar el vehículo. Un video del VR en funcionamiento puede ser visto en: http://cibnor.gob.mx/engineering/VR.html.

Conclusiones
La configuración que permite alternar en cualquier momento la operación autónoma y manual, es versátil dado que se puede cambiar el recorrido del VR. Los comandos enviados al VR fueron ejecutados en tiempo real, lo que muestra la efi ciencia en la comunicación, procesamiento de información y sincronización en los procesos. En todo momento se mantuvo una interacción entre el panel de control y el VR con lo que se brinda seguridad al usuario ante la posibilidad de requerirse recorrida por el VR a 0.8 m/s la operación manual.
La aplicación de una PDA como panel de control, ofrece la posibilidad de crear sistemas con enorme potencial tanto de control, proceso y almacenaje de información. Se cuenta también con un alto nivel de autonomía y movilidad, así como la portabilidad del software, que representa una ventaja adicional.
El proceso paralelo de los distintos sensores y actuadores, es posible debido al diseño modular maestro-esclavo de la arquitectura, la cual permite desarrollar cada una de las funciones del VR. Esta arquitectura es flexible y escalable para ser aplicada a otros sistemas robóticos con mínimas adecuaciones ya que es posible migrar a una netbook o una computadora portátil en lugar de la PDA y usar la arquitectura del VR en un vehículo de mayor tamaño.
El VR tiene la capacidad de transitar tanto en ambientes planos como en terreno irregular manteniendo una operación robusta. Las trayectorias recorridas de manera autónoma en general fueron acertadas al estar dentro del margen de error estimado, al experimentar ligeras desviaciones del punto programado. La fuente de este error se debe a la precisión del compás electrónico y al error acumulativo intrínseco de la odometría.
La detección de obstáculos, por medio del sensor ultrasónico, operó correctamente, toda vez que el VR se detuvo a velocidades de hasta 1.5 m/s.
Al comparar los modos de operación, resulta que son más precisos los movimientos realizados en modo autónomo. Esto es porque en el modo manual el usuario controla el recorrido con base en lo que percibe visualmente, y entonces las correcciones son tardías, mientras que en el recorrido autónomo el VR corrige de manera más oportuna. Adicionalmente, se requiere de pericia y práctica por parte del usuario para ejecutar el modo manual.
De acuerdo a los resultados experimentales en las diversas trayectorias desarrolladas por el VR, el sistema presentado permite ser utilizado para la caracterización del uso de dos antenas ortogonales de GPS. La finalidad es utilizar las coordenadas del GPS que reciba una mejor señal durante un recorrido y entonces ser procesado por un algoritmo de navegación.
El margen de error estimado para la caracterización de los GPS es de ± 2.5 m, por lo que las desviaciones presentadas en los recorridos de campo satisfacen los requerimientos para el algoritmo de navegación, basado en la configuración ortogonal de los GPS.
Agradecimientos
Al técnico Jorge Cobos por su ayuda en el montaje y armado del VR y al FOMIX CONACYT-Sinaloa por los recursos aportados al proyecto: SIN-2005-C01-03.
Referencias
Bourdon, Gerard, Ruaux, Pascal and Delaplace, Stephane, Instantaneous Fuzzy Modelling for Obstacles Avoidance, Systems, Man and Cybernetics. Intelligent Systems for the 21 st Century, IEEE International Conference, 22-25 Oct 1 995, Vancouver, BC, Canada. [ Links ]
Brooks, Rodney A, "A Robust Layered Control System for a Mobile Robot", IEEE Journal of Robotics and Automation, 2 (1): 14 - 23, Mar 1 986. [ Links ]
Campion, Guy, Bastin, Georges and D'Andra-Novel, Brigitte, "Structural properties and classifi cation of kinematic and dynamic models of wheeled mobile robots", IEEE Transactions On Robotics and Automation, 1 2(1 ):47-62, February 1996. [ Links ]
Durrant-Whyte, Hugh, A Critical Review of the State-of-the-Art in Autonomous Land Vehicle Systems and Technology, Informe Técnico, Thechnical Report SAND2001 -3685, Sandia National Laboratories, 2001. [ Links ]
Eicker, Patrick. The Embudito Mission: A case study of the systematics of autonomous ground mobile robots. Informe Técnico, Technical Report SAND2001 -01 93, Sandia National Laboratories, 2001. [ Links ]
Everett, H R, Sensors for Mobile Robots: Theory and Application, A.K. Peters, Wellesley, MA, 1 995, 528. [ Links ]
Fong, Terrence W and Thorpe, Chuck, "Vehicle Teleoperation Interfaces", Autonomous Robots, 11(1): 09-1 8, July 2001. [ Links ]
Fong, Terrence W, Thorpe, Chuck and Glass, Betty, PdaDriver: A Handheld System for Remote Driving, IEEE International Conference on Advanced Robotics 2003, IEEE, July, 2003. [ Links ]
Hine, Butler, Hontalas, Phil, Fong, Terrence W, Piguet, Laurent, Nygren, Erik and Kline, Aaron, VEVI: A Virtual Environment Teleoperations Interface for Planetary Exploration, SAE 25th International Conference on Environmental Systems, July, 1 995. [ Links ]
Large, F, Sekhavat, S, Laugier, C and Gauthier, E, Towards robust sensor-based maneuvers for a car-like vehicle. In Proc. IEEE International Conference on Robotics and Automation, 4: 3765-3770, 2000. [ Links ]
Parkinson, Bradford W and Spiker, James J, Global Positioning System: Theory and Applications, 1st edition, American Institute of Aeronautics and Astronautics, 1 996, 793. [ Links ]

