











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
Los mezcladores industriales son los componentes de mezclado más importantes en las industrias de alimentos, medicamentos, productos químicos, semiconductores, entre otros. En el transcurso del tiempo se ha observado que uno de los principales problemas del mezclado convencional es la formación de segregados o residuos, producto de que los fluidos en proceso presentan números Reynolds pequeños.
Aunque el mezclado y los segregados abatidos pueden mejorarse por medio de algún procedimiento sencillo, como el incremento de la velocidad rotacional de los propulsores, generalmente no resulta muy bueno, ya que compromete el consumo de energía y por lo tanto aumenta los costos. En realidad, las mejoras en los procesos de mezclado siempre son bienvenidas y normalmente justificadas.
En años recientes, el mezclado rotacional típico (i.e., aquel que varía en el tiempo) ha sido extendido al mezclado caótico porque este ofrece, inherentemente, propiedades de estiramiento y retención de los fluidos que igualan los exigentes requerimientos de un buen mezclado (Ottino, 1989). Aunque existen muchos estudios sobre mezclado caótico, son muy pocos los que realmente resultan de utilidad. Sin embargo, gran parte de los mezcladores caóticos generan la caotización por medios mecánicos, lo cual es complejo y poco flexible. En ese sentido, para palear esos problemas, Chau et al. (2004) y Ye & Chau (2007) se propusieron producir eléctricamente el movimiento caótico de mezclado, donde se aprovechan los efectos de la caotización de motores de c.d. para generar dichas dinámicas y comparar eficiencia, perfiles de residuos, consumo energético entre mezcladores rotacionales típicos y rotacionales caóticos o atípicos a nivel simulación y experimental. En ambos trabajos, se utiliza control retroalimentado con retardo de tiempo y se implementa con el circuito de Chua et al. (1992), Mulukutla & Aissi (2002), Kennedy (1992) y Matsumoto et al. (1985). Se comprueba experimentalmente la mayor eficiencia del caótico al mezclar soluciones ácido-base y constatar los cambios en su coloración. Es conveniente mencionar que estos mezcladores ofrecen sencillez mecánica, flexibilidad y controlabilidad.
Algunos otros resultados de trabajos semejantes sobre mezclado rotacional caótico utilizando motores se presentan en los documentos de Clifford & Cox (2006) y Álvarez et al. (2002), donde se persigue simular y experimentar con mezclas de fluidos laminares para estudiar la velocidad de homogenización, la disminución de residuos y la utilización de pantallas adaptables para acelerar caóticamente las reacciones químicas, entre otros aspectos.
En ese sentido, la contaminación producida por el residuo del mezclado rotacional típico, es algo preocupante, y es por ello que en algunos métodos clásicos de mezclado se combinan la cantidad y el posicionamiento de las propelas para tratar de disminuir este residuo, como sucede en el trabajo de Ascanio et al. (2002) para poder competir con el mezclado caótico.
Es bien sabido que en los trabajos sobre caotización los efectos o daños colaterales en los componentes de algunos sistemas de mezclado no son reportados con la claridad necesaria, como es el caso de Chau et al. (2004), Ye & Chau (2007) y Ascanio et al. (2002), así como en las patentes de Muzzio & Lamberto (1999) y Roach (1971), lo que representa una limitación importante para su aplicación confiable, ya que las señales con dinámicas caóticas, cuando estas son de órdenes muy variadas, suelen producir ciclos cortos desbalanceados dentro de los estados de los ciclos caóticos de menor orden, lo cual para el caso de mezclado o agitado algunas veces resultan dinámicas perjudiciales para paletas y propelas (i.e., propulsores). Como puede observarse en el esquema experimental de la Figura 1, en el inciso a) se muestran dos agitadores electrónicos idénticos trabajando de forma típica y caótica (der.) y, en el inciso b) se muestran dos propelas y paletas dañadas por el accionar del agitado caótico.
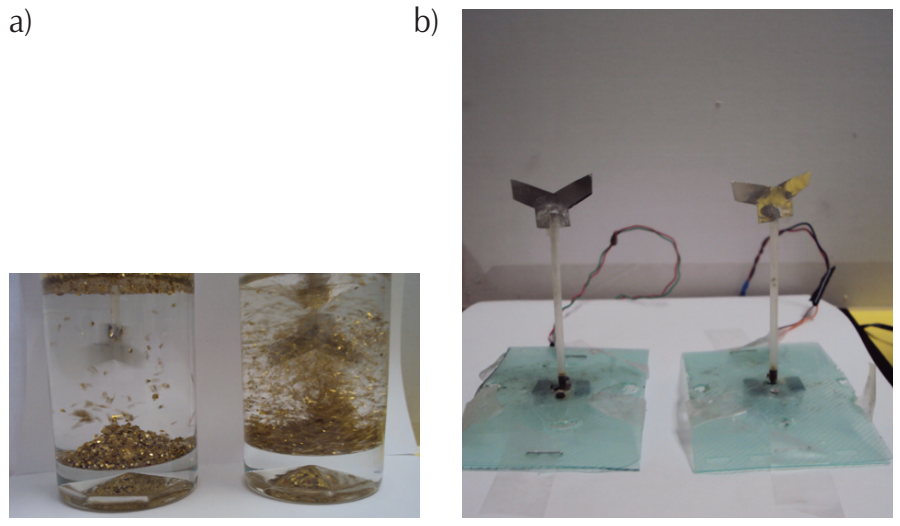
Figura 1 a) Agitados electrónicos típico y caótico (der.) y b) propelas y paletas dañadas por el agitado caótico
De acuerdo con lo anterior, el objetivo de este trabajo es realizar un circuito electrónico pseudocaótico para mezclado que sea más confiable que el caótico y más eficiente que el típico, y que también abata el perfil del residuo. Para lograr esto, se propone realizar un circuito caótico especial que genere una dinámica pseudocaótica amigable con los integrantes del sistema de mezclado; debe contener ciclos cortos en fase y en cantidades iguales en cada estado del ciclo caótico de menor orden para formar los llamados ciclos pseudocaóticos. Estos ciclos deben controlar al mezclador para que produzca un mejor resultado que el que se obtiene con el circuito típico y mucho más confiable que el que se obtiene con el circuito caótico. La creación y aplicación práctica del ciclo pseudocaótico es la aportación en este trabajo.
Para lograr esta confiabilidad se propone construir un par de mezcladores idénticos que reproduzcan las dinámicas señaladas, y para ello utilizarán un oscilador caótico, un modulador de ancho de pulso, un manejador bidireccional de potencia y un micromotor de c.d. con propulsor; estos trabajarán bajo una ley de control en lazo abierto. Se escoge al oscilador de Chua et al. (1992), Mulukutla & Aissi (2002), Kennedy (1992), Matsumoto et al. (1985), Núñez (2017) y (2008) como el generador de la dinámica especial caracterizada por una señal analógica caótica de orden menor. Dicha señal se utilizará por el modulador de ancho de pulso para producir la señal cuadrada con un ciclo caótico binario de orden menor, la cual provocará el movimiento rotatorio de mezclado. Para el caso que nos ocupa se proponen las frecuencias de rotación entre 1 y 12 Hz por ser experimentalmente las que más se asemejan a las del mezclado de interés.
El resto del manuscrito está organizado como sigue. En las secciones 2 y 3 se describen el desarrollo del circuito pseudocaótico y las pruebas experimentales en tiempo real de dos mezcladores idénticos, cuando uno de ellos trabaja en modo típico y el otro en modo pseudocaótico, respectivamente. Después, en la sección 4 se presentan el análisis cualitativo, el diagnóstico general y algunas recomendaciones. Finalmente, en la sección 5 se describen las conclusiones, donde se manifiesta que el funcionamiento de mezclador electrónico pseudocaótico es muy superior al del típico, así como más confiable que el del caótico y por lo mismo, apunta a su posible utilización en laboratorios académicos y de uso en general.
Es muy conveniente mencionar aquí que la aplicación de la dinámica pseudocaótica a un proceso de mezclado puede mejorar su eficiencia, pero nunca en aras de perder su confiabilidad.
El circuito pseudocaótico para aplicaciones de mezclado
El circuito pseudocaótico para aplicaciones de mezclado, o también llamado mezclador electrónico pseudocaótico, está constituido por: 1) el circuito de Chua, 2) el circuito modulador de ancho de pulso, que incluye a los circuitos generadores de onda cuadrada y de ciclos cortos y, finalmente, 3) el circuito manejador bidireccional del micromotor y propulsor. El diagrama esquemático del circuito completo se muestra en la Figura 2.
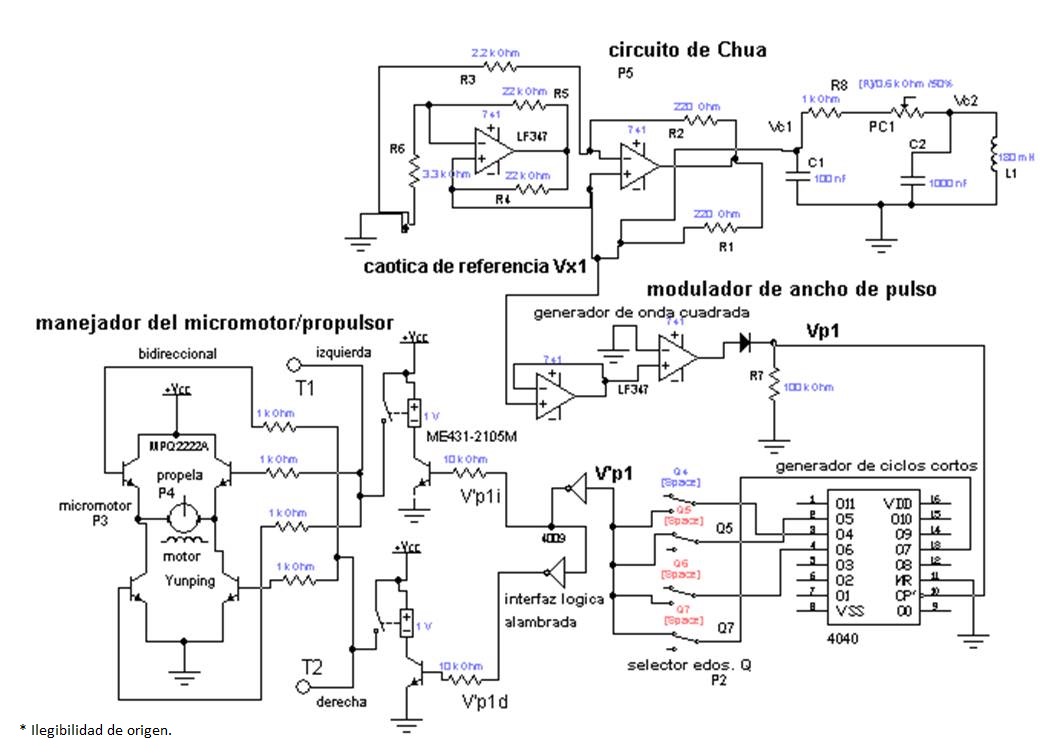
Figura 2 Diagrama del circuito pseudocaótico para un mezclado gentil, i.e., mejor que el típico y más confiable que el caótico
El circuito de Chua
Algunas de las características más relevantes del circuito de Chua et al. (1992), que facilitaron su selección son las siguientes: se le conoce como de doble espiral, ya que produce un atractor cuya dinámica pasa de una espiral sobre un punto de equilibrio al otro y viceversa, es de tercer orden, autónomo, no lineal y disipativo. Además, es muy sencillo de construir puesto que solo se necesitan dos capacitores, un inductor, un resistor y un elemento no lineal. Este último es una conductancia lineal por segmentos, definida por f(x1), la cual se describe en (2). La dinámica del circuito se obtiene de las ecuaciones diferenciales normalizadas (1):
donde x2, x1, y x3, son las variables de estado o señales que representan el voltaje a través de C2, C1, y la corriente en L1, respectivamente. La falta de linealidad necesaria para el comportamiento caótico del circuito mencionado se obtiene de f(x1), llamada diodo de Chua. Dicha función se define en (2):
Donde los valores típicos para los parámetros a (v.g., a= R8m0) y b (v.g., b= R8m1) son -1.27 y -0.68, respectivamente, y para α (v.g., a =C2/C1>0) y β (v.g., β =C2R8^2/L1) son 10.0 y 14.9, respectivamente. En la parte superior de la Figura 2, se muestra el circuito y el diodo de Chua. La literatura sobre este circuito y sus aplicaciones es muy abundante y se remonta a mediados de los 80’s (Chua et al., 1992; Mulukutla & Aissi, 2002; Kennedy, 1992; Matsumoto et al., 1985).
Como ya se señaló, para este caso en particular, el circuito mencionado se hace trabajar en una dinámica caótica de orden menor por medio del parámetro resistivo R8 (i.e., R8= 1 Kilohmio + PC1 (v.g., es un potenciómetro en 0.71 Kilohmio) de la Figura 2), con la idea de que genere una señal analógica caótica de referencia Vx1 que, por su dinámica caótica natural, cada vez que esta señal brinca de un punto de equilibrio al otro y viceversa cruza tres veces el común analógico y completa un ciclo caótico analógico. Dicho ciclo se identifica y forma parte esencial en la realización de este trabajo.
Las pendientes m0 y m1 que se muestran en el plano de fase del diodo de Chua (Kennedy, 1992) (Figura 3) se obtienen de (3):
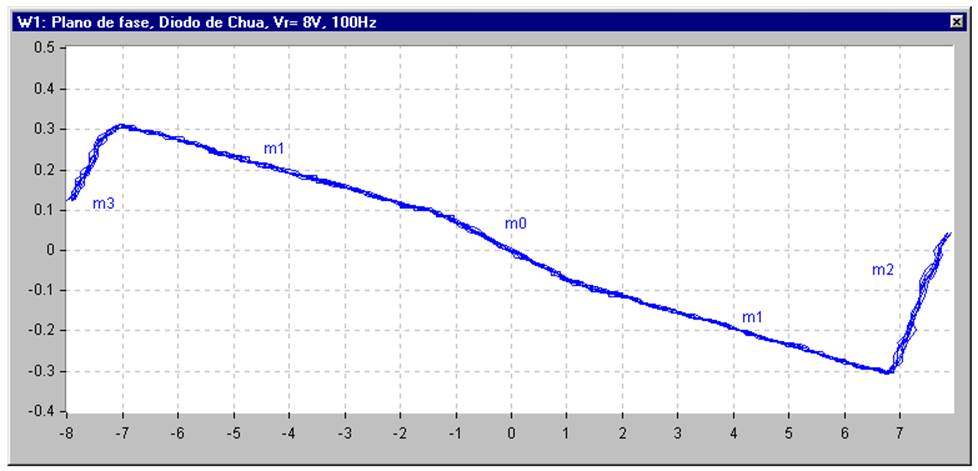
Figura 3 Plano de fase del diodo de Chua o función no lineal f(x1), mostrando pendientes y puntos de ruptura obtenidos según Kennedy (1992) (abscisas: Voltios, ordenadas: Voltios)
El circuito modulador de ancho de pulso y otros
El modulador de ancho de pulso se presenta en la Figura 2, está constituido por el circuito generador de onda cuadrada y por el circuito generador de ciclos cortos (Peatman, 1972).
Circuito generador de onda cuadrada
Se comentó sobre el acondicionamiento al circuito de Chua para producir la señal analógica caótica de referencia Vx1, con alcances aproximados de amplitud y de frecuencia de +/- 2.0 Vp y de 10 a 3000 Hz, respectivamente, y con una dinámica caótica del menor orden posible. Cuando dicha señal pasa de un punto de equilibrio a otro y regresa, cruza tres veces el común analógico y completa un ciclo caótico analógico; esto provoca que el circuito generador de onda cuadrada genere la señal caótica binaria Vp1, o con un ciclo caótico binario, que se muestra en la parte superior de la ventana W2 de la Figura 4.
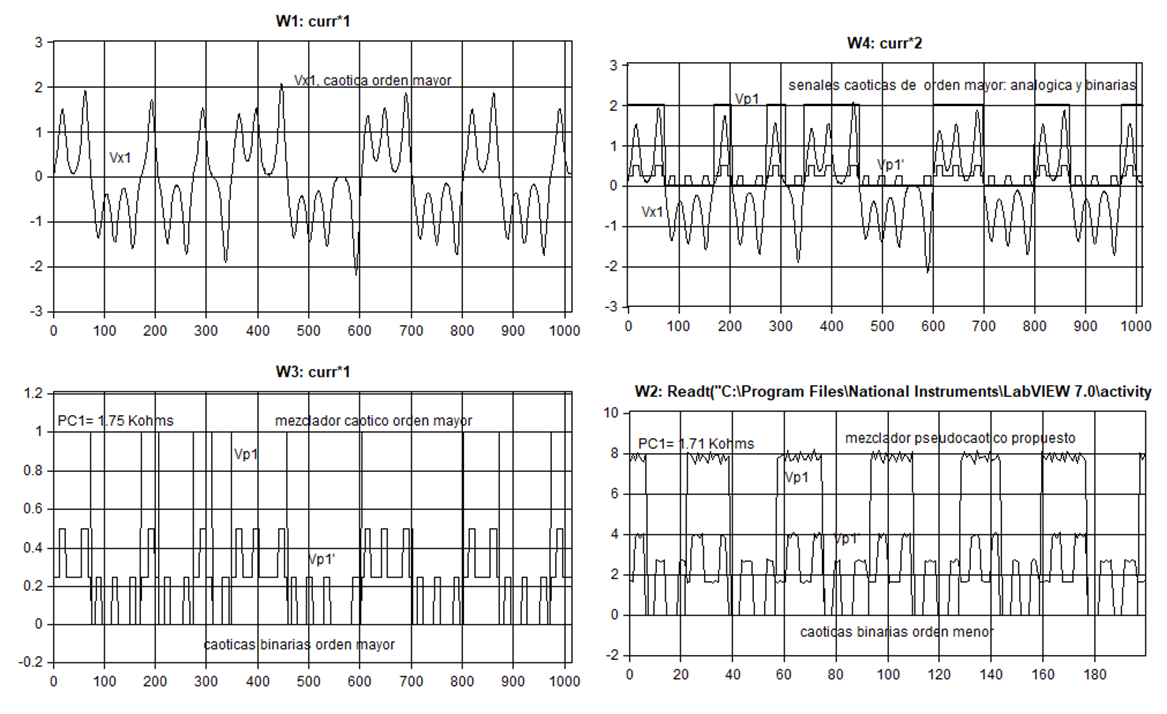
Figura 4 Descripción gráfica de la incorporación de los pulsos cortos en el ciclo caótico de Vp1 para construir el ciclo pseudocaótico de la señal V’p1(W2). La ventana W1 muestra a la señal analógica caótica de referencia de orden mayor Vx1; la ventana W2 presenta a la señal pseudocaótica V’p1 con 4 ciclos cortos balanceados y a la señal caótica de orden menor Vp1 (sup.); la ventana W3 muestra a la señal caótica V’p1 con ciclos cortos desbalanceados y a la señal caótica orden menor Vp1 (sup.). Finalmente, la ventana W4 presenta a la señal caótica de orden mayor Vx1 y a las señales binarias (i.e., Vp1 y V’p1) de W1 y de W3 traslapadas, respectivamente (abscisas: ms., ordenadas: Voltios)
El generador mencionado utiliza un operador analógico y un diodo de conmutación para producir la señal Vp1, cuando se compara el voltaje de la señal Vx1 con el común analógico, mientras esta, como ya se mencionó, realiza su recorrido por los puntos de equilibrio.
Si se desea obtener una dinámica caótica más completa para la señal Vp1, que la que aquí se produce por la señal de referencia, se requieren considerar más órdenes y niveles de comparación con sus operadores analógicos (v.g., como se realiza en el trabajo del medidor del caos del circuito de Chua de (Núñez, 2008).
Aunque, como ya se comentó brevemente en la sección 1, esta dinámica de más órdenes y cantidades desiguales de ciclos cortos en los estados de la señal Vp1, producto de las comparaciones con los niveles de equilibrio, en la mayoría de los casos pueden dañar a los propulsores y a sus propelas. Un ejemplo de estos ciclos cortos desbalanceados se presenta en la parte baja de la ventana W3 de la Figura 4.
Circuito generador de ciclos cortos
Para evitar los posibles daños mencionados en la parte final de la sección del circuito generador de onda cuadrada, es necesario balancear o disminuir estas diferencias entre los ciclos cortos por medio de un circuito generador de los mismos. Este circuito se encarga de balancear por estado de la señal caótica binaria Vp1 a estos ciclos cortos como se muestra en la parte inferior de la ventana W2 de la Figura 4.
Para lo anterior, se necesita conocer la frecuencia promedio de rotación Fprom de la señal Vp1. Para el caso y considerando el valor resistivo del parámetro PC1 (v.g., ya seleccionado en la sección del circuito de Chua) que produce una dinámica caótica de orden menor, la Fprom que se obtiene bajo estas condiciones es de 192 Hz. Dicha frecuencia resulta todavía muy grande en comparación con la necesaria por la aplicación comprometida que va de 1 a 12 Hz (v.g., como se especificó en la primera sección). Por lo cual es necesario disminuir esta frecuencia promedio de rotación para obtener la frecuencia real de rotación Freal.
Para ello, se eligió al estado Q7 del contador CD4040 (v.g., que es uno de los 12 estados Q del componente) como el estado de referencia QR. Se obtiene la Freal dividiendo la Fprom entre este estado (i.e., la Freal= Fprom/QR= 1.50 Hz) donde es a la señal de esta Freal a la que se le incorpora o suma en fase y en cantidades iguales, algún otro estado Q de frecuencia mayor, o de ciclo más corto, para construir el ciclo pseudocaótico o la señal pseudocaótica V’p1, tal y como se observa en la parte baja de la ventana W2 de la Figura 4 y en las correspondientes pantallas de las Figuras 5 y 6. De esta manera, este ciclo más corto incorporado asemeja o es equivalente a uno caótico de orden mayor. Es posible lograr más órdenes, si se intercalan los otros dos estados válidos del contador señalados en la Tabla 1.
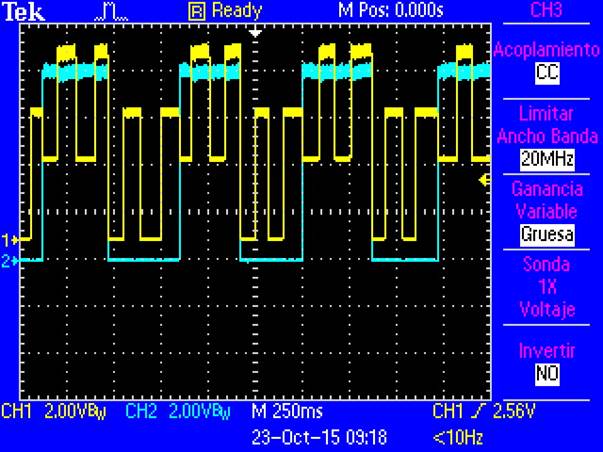
Figura 5 Mezclado de orden 4, señales Vp1-QR (1.50 Hz) (azul-inf.) y V´p1(pseudocaótica) (6 Hz), con 4 ciclos cortos incorporados al ciclo caótico de orden menor de Vp1 (i.e., es el mismo caso de la ventana W2 de la Figura 4) (abscisas: ms., ordenadas: Voltios)
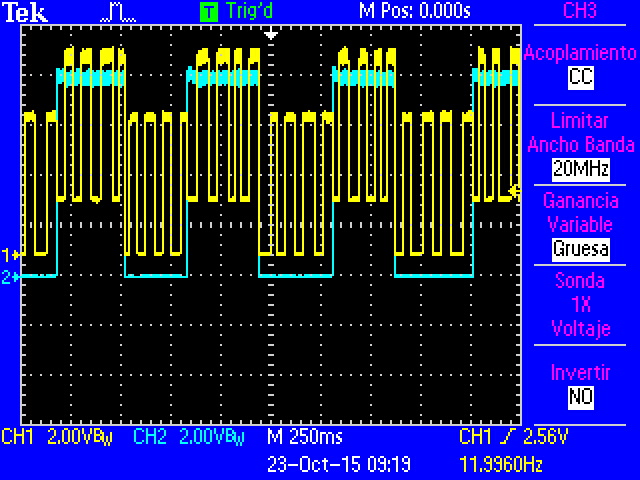
Figura 6 Mezclado de orden 8, señales: Vp1-QR (1.50 Hz) (azul-inf.) y V´p1(pseudocaótica) (12Hz), con 8 ciclos cortos incorporados al ciclo caótico de orden menor de Vp1. Se registra una homogenización más eficiente en tiempo y forma (abscisas: ms., ordenadas: Voltios)
Tabla 1 Selector de ciclos cortos para construir el ciclo pseudocaótico con la dinámica deseada
| Estados Q´s, del CD4040 |
Frecuencia de los ciclos cortos |
Selector y orden |
|---|---|---|
| Q7= 128, QR/Q7= 1, edo. refer. | Freal=Fprom/QR = 1.50 Hz | Selector 4, orden 1 |
| Q6= 64, QR/Q6= 2 | 3.0 Hz | Selector 3, orden2 |
| Q5= 32, QR/Q5= 4 | 6.0 Hz | Selector 2, orden 4 |
| Q4= 16, QR/Q4= 8 | 12.0 Hz | Selector 1, orden 8 |
El selector de estados del contador P2, facilita el conexionado de los estados válidos (i.e., el orden deseado) para que a través de la interfaz de lógica alambrada CD4009 se genere, como ya se dijo, la señal V’p1 que activa al manejador bidireccional del micromotor de c.d. En principio, esta señal puede estar integrada por la suma de los estados del contador QR + Q6, QR + Q5, QR + Q4, pero pueden realizarse otras combinaciones, dependiendo de la dinámica con la que se desea realizar el mezclado pseudocaótico; es conveniente mencionar que las frecuencias de las señales de estos estados válidos del contador son múltiplos enteros de la Freal.
Durante cada rotación se incorporan los ciclos de corta duración, atendiendo solo a los estados válidos del Q4 al Q6, y sus polaridades hace que aparezcan como dinámicas caóticas de mayor orden (v.g., estos pueden ser de 2, 4 y 8 ciclos cortos por ciclo caótico de menor orden, según lo indica la Tabla 1, la ventana W2 (V’p1) de la Figura 4 y las pantallas (V’p1) de las Figuras 5 y 6). Como ejemplo, se tiene el caso de la Figura 6, donde se presenta un mezclado de orden 8, i.e., equivalente a 8 ciclos cortos de 12 Hz por ciclo caótico de la señal Vp1.
El circuito manejador bidireccional del micromotor y su propulsor
El circuito manejador bidireccional del micromotor y su propulsor está integrado por dos microrelevadores (v.g., el ME431 de Mouser), un puente H de transistores (v.g., el MPQ2222A de National), un micromotor de c.d. (Yunping, 2012), un propulsor y su propela. Como se observa en la Figura 2, se utilizan los microrelevadores para poder manejar motores de mayor capacidad, según sea el caso. Las especificaciones electromecánicas del circuito manejador y del propulsor indican que son de respuesta rápida y eficiente; además, cuentan con las protecciones para tolerar ruido eléctrico y variaciones en la alimentación.
Para la operación bidireccional del micromotor y su propulsor se utilizan las señales pseudocaóticas V’p1d (i.e., en rotación derecha) y V’p1i (i.e., en rotación izquierda) provenientes del circuito interfaz de lógica alambrada CD4009 y de los microrelevadores. De esta manera, dichos ciclos rotatorios resultan amigables con el manejador bidireccional del micromotor. Para facilitar el control del puente H de transistores, se utiliza un esquema de control todo-nada en lazo abierto. Próximamente, se tiene contemplado cerrar el lazo con sensores de calidad de mezclado para mejorar la precisión del propuesto.
Se construyen varios juegos de propulsores y propelas, estas últimas con diferentes tipos de palas. Los juegos se prueban en el laboratorio y se escogen los más apropiados para acoplarse al micromotor de c.d. El diseño y construcción de estos componentes mecánicos se realiza considerando los aspectos del área efectiva de trabajo, par de fuerza, material, peso, volumen por agitar, microacoplador, entre otros (Maxon, 1994).
Pruebas experimentales en tiempo real a los mezcladores estudiados
Se planifican los experimentos para que los resultados faciliten su análisis cualitativo y el diagnóstico del funcionamiento de los circuitos mezcladores. Se construyen dos circuitos mezcladores bidireccionales idénticos para realizar el estudio comparativo de su capacidad de mezclado, cuando se hace trabajar el primero en forma típica y el segundo en forma pseudocaótica; ambos al unísono y bajo las mismas condiciones de laboratorio. Para las pruebas se utilizan líquidos no afines que facilitan la observación instantánea del proceso de homogenización de la incorporación de residuos y de los grados de turbidez; así también permiten la medición de los tiempos para lograr dicha homogenización.
Aplicación de los circuitos mezclando agua y miel en forma típica y pseudocaótica
Se considera una muestra representativa de agua y miel de abeja para medir el tiempo de mezclado necesario en que se logra la homogenización al color deseado o a 100 %, según sea el caso. Por otro lado, también se desea conocer el acumulamiento o el perfil del residuo y el grado de turbidez para ambos tipos de mezclado.
Las fotografías de las Figuras 7 y 8 muestran los experimentos y los colores del grado de homogenización lograda por los mezclados típico y pseudocaótico (der.) de orden 4 (cf., con las señales de la pantalla de la Figura 5) después de un tiempo de mezclado de 4 y 12 s, respectivamente. Se contempla que los mezclados presentan velocidades de rotación, homogenización y turbidez muy diferentes. Ahora bien, si se deja correr la prueba hasta lograr una homogenización de 100 %, los tiempos terminan siendo en promedio del orden de 300 s y de 12 s para los casos típico y pseudocaótico, respectivamente.

Figura 7 Comparación de mezclados: típico vs pseudocaótico (i.e., de orden 4 y los estados utilizados del contador QR y Q5 (i.e., de 1.5 y 6 Hz); con un tiempo de mezclado de 4 s. Se observa la homogenización en proceso y mayor turbidez para el caso pseudocaótico (der.)

Análisis cualitativo, diagnóstico general y recomendaciones
La aplicación y las pruebas de comparación cualitativa a los funcionamientos de los circuitos mezcladores típico y pseudocaótico arrojan resultados conforme a lo planificado.
Resultados del circuito mezclando agua y miel en forma típica y pseudocaótica
Como ya se mencionó, se persigue averiguar experimentalmente los tiempos que tardan los mezcladores típico y pseudocaótico en lograr una homogenización al 100 % del agua y la miel de abeja. Para esta condición los resultados de las pruebas experimentales que se muestran en las fotografías de las Figuras 7 y 8, registraron los tiempos promedio de 300 s y de 12 s para los mezclados típico y pseudocaótico, respectivamente. Finalmente, se puede mencionar que, el mezclado pseudocaótico, registra un tiempo de homogenización mucho menor que el de su contraparte, i.e., su tiempo realizado es equivalente a 4 % del que registra el típico.
Los resultados de la aplicación y su diagnóstico concuerdan con los esperados y es posible mejorarlos a través de:
a) Ajustar el parámetro resistivo PC1 del oscilador de Chua.
b) Utilizar un estado más en el generador de pulsos cortos (v.g., uno de orden 16 con Q3).
c) Perfilar mejor las propelas.
Se constató experimentalmente que los propulsores y sus propelas soportaron muy bien estos cambios instantáneos de dirección, velocidad y par.
También es conveniente mencionar que ante una prueba de agitado de diamantina en agua, el perfil del residuo que formó esta al terminar y que quedó bajo la propela, se aplana mayormente en el caso pseudocaótico, como se aprecia claramente en la parte de la derecha de la Figura 9. Este resultado es muy importante para la industria, ya que se reportan problemas de contaminación y pérdidas económicas debido a los perfiles cónicos de estas incrustaciones (Clifford & Cox, 2006; Álvarez et al., 2002; Muzzio & Lamberto, 1999). En la Figura 10, se muestra la maqueta de prueba prototipo conteniendo los circuitos mezcladores típico y pseudocaótico en condición de reposo.

Figura 9 Los perfiles finales del agitado de diamantina en agua son cónico y casi plano (der.) para los agitados típico y pseudocaótico, respectivamente. El agitado pseudocaótico seleccionado fue de orden 4 y sus estados fueron QR y Q5

Diagnóstico general y recomendaciones
La aplicación de mezclado de agua y de miel de abeja arroja resultados cualitativos prometedores, puesto que el mezclador electrónico pseudocaótico supera casi en todo al típico. Se piensa que el primer mezclador podría ser más rentable que utilizar dos o tres típicos semejantes, porque aparte de homogenizar mejor, también puede reducir el cono de residuos contaminantes (Clifford & Cox, 2006; Álvarez et al., 2002; Muzzio & Lamberto, 1999), lo cual podría plantear alternativas novedosas de solución a problemas añejos de contaminación en el mezclado de procesos industriales en general.
Las frecuencias pseudocaóticas y su variación deben ser gentiles con el propulsor y la propela, ya que se busca que el circuito mezclador sea más confiable que eficiente. Esto se puede lograr con el posicionamiento adecuado del selector de ciclos cortos, como se indica en la Tabla 1.
Para validar cuantitativamente la reproducibilidad de los resultados se necesita contar con la instrumentación para correlacionar mediciones entre ambos funcionamientos de energía, conductividad, pH, vibración y sonido. Así también, se requiere realizar una evaluación a mediano plazo para averiguar acerca de la pérdida de confiabilidad, producto que compromete:
a) El ciclo de vida de los integrantes del mezclador.
b) El acumulamiento de residuos contaminantes.
c) La pérdida de producto mezclado.
Optimizar las propelas y los recipientes de mezclado es una labor primordial. En ese sentido, se puede mencionar que se tiene un bosquejo de un propulsor novedoso en contrafase, el cual se piensa mejorará los resultados del mezclador pseudocaótico.
Se contempla que un sistema mínimo de control digital que administre las recetas de mezclado pesudocaótico, considerando la retroalimentación de las variables más representativas, podría mejorar el costo-beneficio en general.
Proponer y evaluar aplicaciones de este tipo de mezclado en laboratorios académicos e industriales enriquecería mucho al prototipo (v.g., en la fabricación de pinturas, en el procesado de alimentos, en las actividades de lavado, molienda, pulido, entre otras) (Figura 10).
Conclusiones
La evaluación cualitativa del mezclador pseudocaótico basado en el circuito electrónico realizado, muestra que su funcionamiento es muy superior al del típico y más confiable que el del caótico.
Este circuito cumple con todas las características planteadas además de su eficiencia, utilizando el mezclado pseudocaótico no compromete la confiabilidad. Es más sencillo y económico que los mezcladores con control retroalimentado, ya que solo utiliza un circuito de Chua, un modulador de ancho de pulso y un manejador bidireccional del micromotor con su propulsor.
La generación de la dinámica pseudocaótica es la verdadera aportación del trabajo. Esta se basa en disminuir la frecuencia de una señal caótica de orden menor por medio de un divisor binario de frecuencia, asimismo toma de referencia a uno de los estados de este divisor para sumarle otros estados de frecuencia mayor en fase y balanceados, los que finalmente resultan equivalentes a algunos caóticos de orden mayor. Así, es posible lograr un mezclado mejor que el del circuito típico y más amigable y confiable que el del circuito caótico con un buen abatimiento del perfil de residuos contaminantes.
Se tiene contemplado realizar validaciones cuantitativas (v.g., utilizando mediciones de conductividad, pH, sonido, vibración y consumo eléctrico) de la calidad de la homogenización con diferentes sustancias.
Es importante averiguar los efectos colaterales de este tipo de mezclado (v.g., como la pérdida de material mezclado, la incrustación excesiva de residuos, el desgaste del equipo, entre otros), dado que la bibliografía consultada sobre estos efectos en la mayoría de los mezcladores electrónicos caóticos reportados y funcionando son desconocidos, o en el mejor de los casos están por declararse.
Por otro lado, el circuito mezclador propuesto puede ser escalado fácilmente a nivel industrial y durante su desarrollo surgieron ideas para mejorarlo utilizando propulsores en contrafase.
Se pretende automatizar el proceso para integrar recetas de mezclado y evaluar las posibles mejoras (v.g., en obtener menores tiempos de homogenización, cantidades de residuos contaminantes, consumos de electricidad, desgastes en sus componentes y pérdidas de producto mezclado). Esto facilitaría la obtención del costo/beneficio y las aplicaciones en laboratorios académicos e industriales, v.g., en fabricación de pinturas, lavado, procesado de alimentos, molienda, pulido, entre otras.

