











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
1. Introducción
En la actualidad, los dispositivos robóticos de rehabilitación desempeñan un papel crucial en la recuperación de las articulaciones y músculos lesionados. Estos sistemas se basan en proporcionar movimientos repetitivos, suaves y progresivos en el proceso de rehabilitación de las extremidades afectadas. La creciente necesidad de estos dispositivos se hace evidente debido al aumento constante de personas discapacitadas a raíz de que sufren un accidente cerebrovascular (ACV) o presentan una lesión como un incidente traumático. El ACV es una condición causada por el bloqueo del suministro de sangre a una parte del cerebro, y es uno de los principales problemas de atención médica tanto en Estados Unidos como en el resto del mundo [1, 2]. Después de haber presentado un ACV, los pacientes generalmente experimentan una pérdida significativa de movilidad en la mitad del cuerpo, lo que hace que la rehabilitación inmediata sea esencial para recuperar parte de su función en las extremidades.
Por otra parte, los incidentes traumáticos pueden causar lesiones en las extremidades superiores e inferiores, limitando la capacidad de realizar actividades cotidianas en algunas situaciones. Además, esta problemática se agrava por la insuficiencia de profesionales de la salud en fisioterapia para satisfacer la creciente demanda de rehabilitación [3] . Por tanto, el uso de sistemas robóticos en la rehabilitación se ha vuelto fundamental para mejorar la calidad de vida de los afectados por ACV y otras lesiones en las extremidades. Estos dispositivos permiten una rehabilitación intensiva con movimientos controlados y una mayor duración del tratamiento, lo que los convierte en una herramienta valiosa en el proceso de recuperación [2, 4].
De manera más específica, el daño más común en la articulación del tobillo es el estiramiento de los ligamentos de la articulación, conocido como esguince de tobillo. Ocurre cuando el tobillo gira, se dobla o se flexiona de forma no natural; presentándose principalmente en deportistas, aunque también se presentan en personas que realizan movimientos pasivos, es decir, llevan un estilo de vida mayoritariamente sedentaria [5].
Desde una perspectiva mecánica, el tobillo puede ser conceptualizado como un mecanismo con 3 grados de libertad (GDL). Para el diseño del rehabilitador de tobillo, es fundamental identificar los tipos de movimientos naturales que contiene esta parte del cuerpo [6]: a) abducción/aducción, el cual es el movimiento externo e interno en el plano sagital; b) dorsiflexión/plantarflexión, que consiste en el movimiento hacia arriba y hacia abajo en el plano transversal y, por último, c) la eversión/inversión, los cuales son los movimientos de rotación interna y externa en el plano frontal.
Dentro de la alta gama de sistemas desarrollados para la recuperación de tobillos, la mayoría de estos sistemas proporcionan los movimientos de inversión/eversión y dorsi/plantar flexión [7,8]. Esta amplia variedad de dispositivos y enfoques ha revolucionado la forma en que se aborda la rehabilitación de las extremidades, permitiendo un enfoque más efectivo y personalizado para cada paciente [9-12]. La evolución continua en este campo promete seguir mejorando la calidad de vida de quienes buscan recuperar su movilidad y funcionalidad.
En las últimas décadas, se han realizado diversos aparatos y sistemas destinados a la recuperación de las extremidades superiores e inferiores. La mayoría de estos dispositivos se fundamenta en el principio del movimiento continuo pasivo (MCP) (o CPM - Continuous Passive Motion) [13], el cual se emplea en las fases iniciales del proceso de rehabilitación con el propósito de restaurar la movilidad, prevenir la rigidez y recuperar el rango de movimiento. Estas máquinas se erigen como instrumentos suplementarios en el arsenal de los terapeutas físicos, dado que permiten ofrecer movimientos suaves, ininterrumpidos y adaptados a las particularidades de la lesión de cada paciente. Blanco et al., [14,15] presentaron un prototipo virtual de rehabilitación de tobillo con 3 GDL, que proporciona los movimientos de dorsiflexión, plantarflexión, abducción, aducción, inversión y eversión. En este prototipo implementaron controles de tipo Proporcional, Integral, Derivativo (PID) y basado en par calculado por separado para el seguimiento de trayectorias, además desarrollaron modelos matemáticos para uno y dos grados de libertad.
Otro rehabilitador de tobillo de 2 GDL basado en una meza X-Y fue propuesto tanto por Gama [16] como por Romeo et al., [17]; este rehabilitador proporciona los movimientos de abducción/aducción y dorsiflexión/plantarflexión [18]. Para el control con seguimiento de trayectorias, implementaron controladores Proporcional-Derivativo (PD), PID y proporcional integral generalizado (GPI), logrando resultados satisfactorios. También, propusieron un controlador generalizado robusto diseñado específicamente para el seguimiento de trayectorias predefinidas, basadas en polinomios de Bézier.
En trabajos posteriores, Ruiz-Hidalgo et al., [19] y Cobo-Viteri [20] llevaron a cabo la implementación de un control mioeléctrico en un rehabilitador de tobillo. Este enfoque es un sistema de control que utilizan sensores mioeléctricos de superficie adheridos al brazo del paciente. Al realizar movimientos con un joystick, el rehabilitador se activa al detectar el movimiento del brazo, generando así un ejercicio de movimiento. Este enfoque no sólo diversifica las opciones de control, sino que también introduce un método más intuitivo y directo de interacción entre el usuario y el rehabilitador. La integración de este sistema mioeléctrico en el diseño de rehabilitador de tobillo de 2 GDL marca un avance significativo en la mejora de la experiencia de rehabilitación, al proporcionar un control más preciso y adaptado a las necesidades del paciente. Estas innovaciones prometen contribuir a la eficacia y versatilidad de los dispositivos de rehabilitación en el ámbito de la ingeniería biomédica.
Observando una evolución en el ámbito físico, García-Velarde [21] propuso un prototipo rehabilitador de tobillo de 3 GDL. Este dispositivo proporciona los 6 tipos de movimientos básicos, así como dos combinaciones de estos. Las rutinas propuestas aseguran una mayor sincronización y coordinación en los movimientos realizados con el paciente, durante el proceso de rehabilitación [22]. Por otro lado, Guzmán Valdivia et al., [23] presentaron el diseño y control de un sistema interactivo (TobiBot) de 1 GDL para pacientes que requieran de una rehabilitación de tobillo. Se presenta un análisis biomecánico de los movimientos básicos del tobillo de dorsiflexión/plantarflexión. El control de los movimientos se lleva a cabo mediante un control de tipo proporcional-integral-derivativo (PID), con la adición de un control de impedancias para ejercicios que involucran resistencia. Este enfoque considera un videojuego con niveles bajo, mediano y alto, en el rehabilitador se presentan efectos de oposición en los movimientos que el paciente debe realizar.
Para realizar la rehabilitación de tobillo, es necesario que el terapeuta genere un plan de entrenamiento de acuerdo a su experiencia clínica, sin embargo, es imposible garantizar con seguridad que la rehabilitación se está desarrollando adecuadamente, ya que es difícil que los mismos terapeutas puedan controlar con una alta precisión los movimientos, parámetros y fuerzas complejas que la rehabilitación necesita. Por ello, se volvió de gran importancia la fabricación de robots de asistencia que mejoren la rehabilitación tradicional, proporcionando movimientos precisos y adaptativos a largo plazo [24].
En el último siglo se han propuesto diversas arquitecturas de robots asistentes rehabilitadores de tobillo. Los robots paralelos son estructuras mecánicas con al menos dos cadenas cinemáticas conectadas a una base fija y a una base móvil, mientras que los mecanismos solo cuentan con una cadena cinemática. Un ejemplo de un robot paralelos es el rehabilitador de “Rutgers” presentado por Alvarez-Perez et al., [25], el cual es un dispositivo basado en la plataforma Stewart, que lo hace capaz de realizar 6 diferentes movimientos (dorsi - plantarflexión, eversión - inversión, aducción - abducción). Los movimientos son accionados por pistones neumáticos útiles para ejercicios resistivos y que, a través de un sistema de control inteligente se interconecta a una guía con interfaz para realidad virtual (VR) y una interacción háptica en el dispositivo para navegar en un juego de simulación en 3D. D. Cioi et al., [26], utilizaron actuadores neumáticos en el rehabilitador de Rutgers. Realizando pruebas con niños con epilepsia, utilizando un sistema de control que conecta a la máquina con un videojuego de aviación de realidad virtual.
Otros tipos de rehabilitadores proponen usar sólo 2 movimientos del tobillo (dorsi/plantarflexión), enfocándose en terapias de tipo activa-resistiva. En éstos, la rehabilitación se realiza por medio de ejercicios que activan los músculos del paciente, por ende, este tiene que generar un esfuerzo para mantener una recuperación gradual siguiendo una rutina planificada. S. Pittaccio et al., [27], desarrollaron un rehabilitador de tobillo de 1 GDL donde la activación se hace por medio se señales electromiografías provenientes del esfuerzo del paciente, desencadenando la activación de actuadores eléctricos (motores) para que el rehabilitador se mueva. También se presentan otras aplicaciones [28-30] que se centran en evaluar accidentes cerebrovasculares, donde la máquina interactúa con juegos virtuales y un control de impedancia que ayuda a mejorar el rango de movimiento dorsi/plantarflexión, así como el torque que genera resistencia en la terapia conforme existe una mejora.
Para los procesos de rehabilitación de tobillo se recomiendan trayectorias definidas con movimientos combinados o complejos, Algunos ejercicios que se llevan a cabo son: flexión/extensión, inversión/eversión, aducción/abducción. Así como, la aplicación de protocolos para llevar una adecuada recuperación. En 2003, Zoch et al., [31] mencionaron que es importante establecer un programa en la rehabilitación del tobillo, así como, una combinación de diferentes ejercicios que conduce a mejores resultados y permite un pronto retorno a las actividades de la vida diaria.
En 2012, Canosa [32] propuso que los protocolos de recuperación tienen que ser específicos para la persona lesionado y responder a las demandas específicas de las actividades que desempeñan. En estos protocolos recomiendan ejercicios de flexión dorsal/plantar e inversión/eversión, así como, el número de repeticiones según el grado y tipo de lesión. En 2018, Monteiro et al., [33] mencionaron que el objetivo de un protocolo de rehabilitación es fortalecer los músculos del pie y aumentar la flexibilidad para mejorar la función de las extremidades inferiores, prevenir complicaciones adicionales y mejorar la autonomía para las actividades de la vida diaria. En 2018, Jansen et al., [34] hicieron mención que los movimientos controlados en fracturas de tobillo a diferentes rangos de amplitud conducen a mejores resultados clínicos y funcionales, obteniendo un regreso más temprano al trabajo. En 2019, Nakao et al., [35] mencionaron que los movimientos de dorsiflexión y plantar flexión realizados en un tiempo de cinco minutos disminuyen la rigidez de los tobillos lesionados y aumentan considerablemente en movimiento y los rangos de amplitud.
Tabla 1: Resumen del estado del arte
| Movimientos | GDL | Rehabilitación | Control | Descripción del sistema | Ref. |
| D/P I/E A/A | 3 | Pasiva | PID | Conformado por una serie de eslabones rígidos que permiten la rotación en los tres ejes para proporcionar los movimientos | [14] (2013) |
| D/P | 1 | Pasiva | N/E | Visión artificial para el seguimiento del rostro, utilizando librería facetracking. | [16] (2018) |
| A/A D/P | 2 | Pasiva | PID | Configuración de mesa XY, utiliza dos motorreductores de CD. | [18] (2014) |
| D/P | 1 | ´Pasiva | Control Mioeléctrico | Un actuador lineal que actúa con un voltaje de referencia de 0 a 4V. | [19] (2014) |
| D/P I/E A/A | 3 | N/E | N/E | Dos plataformas móviles, a su vez alojadas en una estructura de soporte y asistencia. | [20] (2018) |
| D/P A/A I/E | 3 | pasiva | N/E | Basado en un robot paralelo, Cuenta con dos actuadores lineales, un poste de soporte. | [22] (2019) |
| D/P | 1 | Pasiva/activa | PID | Utiliza una tarjeta de control, la interfaz y el controlador. | [23] (2014) |
| D/P | 1 | Activa | N/E | Un zapato tipo sandalia con una placa de prototipos Arduino y un acelerómetro. | [7] (2021) |
| I/E COM FD/P | 2 | Pasiva | PID | Con estructura de robot paralelo tipo 2-RRSP. | [8] (2017) |
D: dorsiflexión, P: plantarflexión, I: inversión, E: eversión, A: abducción, A: aducción. FD: flexión dorsal, COM: combinado, NE: no especifica, PID: proporcional integral derivativo, GDL: grados de libertad.
En este artículo se reporta el diseño, control y resultados de simulación a través de prototipo virtual de un novedoso dispositivo para rehabilitación de tobillo, el cual está basado en la antropometría de la población mexicana, en la cinemática del tobillo y en rutinas de las terapias de rehabilitación. El dispositivo proporciona los movimientos de dorsiflexión-plantarflexión y eversión/inversión y movimiento combinado (2 GDL) con ejes de rotación que cruzan por la articulación del tobillo. Además, los movimientos oscilatorios de dorsiflexión-plantarflexión y eversión - inversión se logran con un movimiento continuo del motor a velocidad constante gracias al diseño de mecanismos de 4 barras. Estos mecanismos transforman el movimiento angular de los motores eléctricos en movimientos oscilatorios en el soporte del pie (base móvil). Su capacidad para ejecutar movimientos precisos de dorsiflexión - plantarflexión y eversión - inversión de manera continua, armónica y a la misma frecuencia del ciclo de marcha, proporciona una experiencia de rehabilitación más efectiva y cómoda para los usuarios. Además de estos movimientos individuales, se resalta su versatilidad al permitir la realización de movimientos combinados, lo cual amplía su utilidad en diversos contextos clínicos. En consecuencia, este dispositivo emerge como una herramienta prometedora en el ámbito de la rehabilitación, ofreciendo soluciones avanzadas y personalizadas para mejorar la calidad de vida de los pacientes.
Este artículo se estructura de la siguiente manera: en la Sección 2 se presentan la máquina de rehabilitación de tobillo, se determina el modelo matemático para los dos movimientos y se diseña una estrategia de control para la velocidad de cada motor. En la Sección 3, se presentan los resultados de simulación, para ambos movimientos, dorsiflexión-plantarflexión y abducción-aducción, con la estrategia de control. En la sección 4 se presentan las conclusiones.
2. Rehabilitador de tobillo de 2 GDL
En la Figura 1 se presenta el rehabilitador de tobillo de 2 grados de libertad. Utiliza dos motorreductores (Motor de engranaje helicoidal, 12 V, 34 RPM); un motor (E1) va acoplado mediante unos eslabones (mecanismo de 4 barras) para actuar el movimiento de dorsi/plantarflexión y el otro motor (E2) va acoplado a otro mecanismo de 4 barras para proporcionar el movimiento de inversión/eversión. En el diseño mecatrónico del rehabilitador de tobillo se implementaron metodologías de diseño concurrente tales como: diseño para manufactura y diseño para ensamble, lo que resulta en un prototipo de bajo costo al minimizar las piezas (15 piezas), utilizar componentes estándar (ejes, rodamientos, sujetadores) y piezas fáciles de manufacturar y ensamblar.
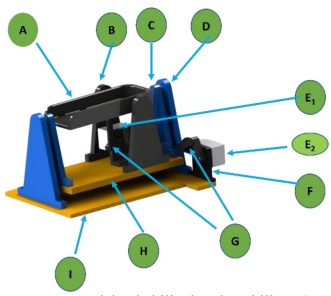
Figura 1 Componentes del rehabilitador de tobillo. A) Base móvil, B) Soporte D/P, C) Soporte I/E, D) Soporte fijo, E) Motorreductores, F) Base motor, G) Mecanismo de 4 barras, H) Base secundaria, I) Base principal.
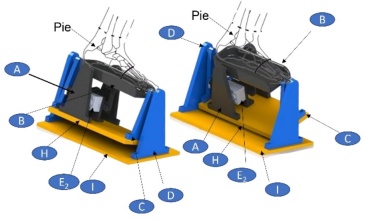
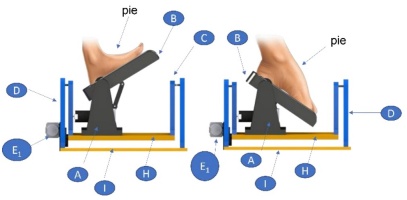
Los motorreductores proporcionan la potencia para impulsar los movimientos del tobillo. Por otra parte, se sintetizó el mecanismo de 4 barras para convertir el movimiento rotativo a velocidad constante de los motorreductores en movimientos de oscilación (balancín) requeridos para reproducir los movimientos naturales de dorsiflexión/plantarflexión e inversión/eversión de manera continua. En la Figura 2 se muestra el prototipo en las posiciones máximas de inversión y eversión, y en la Figura 3 en las posiciones máximas de dorsiflexión y plantarflexión. La configuración del rehabilitador, permite proporcionar también movimientos combinados entre ellos al activar los motorreductores simultáneamente.
2.2 Modelado matemático
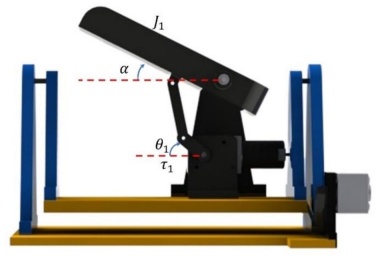
Considere la Figura 4 , donde θ 1 representa el ángulo de giro del motor para el movimiento de dorsiflexión - plantarflexión, J 1 representa el momento de inercia equivalente, respecto al eje de giro del motor, y τ 1 es la entrada de control del motorreductor.
De manera similar, considerando la Figura 5, θ 2 representa el ángulo para el movimiento de inversión-eversión, J 2 representa el momento de inercia equivalente de la plataforma móvil, respecto al eje de giro del motor, y τ 2 es la entrada de control del motorreductor. Para ambos movimientos se considera amortiguamiento viscoso denotados por b 1 y b 2 .
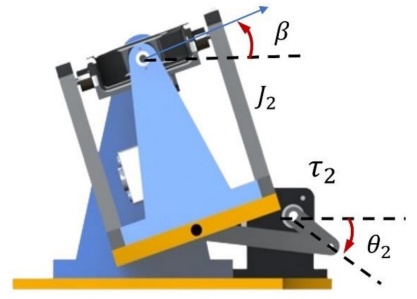
Tomando en cuenta las Figuras 4 y 5, se utiliza la segunda ley de Newton para obtener los modelos matemáticos que rigen la dinámica del sistema, para cada movimiento, dados por:
Haciendo un cambio de variables:
2.3 Sistema de control
Se propuso un control Proporcional - Integral (PI) para la regulación de las
velocidades
Donde se propone que para las velocidades angulares (frecuencia), para estas simulaciones, los valores deseados sean:
En ambas ecuaciones, (1) y (2), las ganancias se definen por
asignación de polos para que la dinámica en lazo cerrado sea asintóticamente
estable,
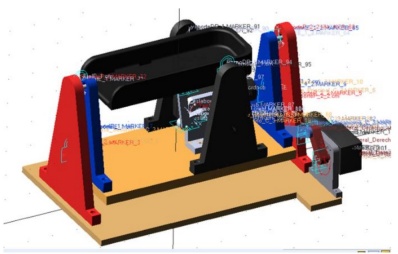
2.4 Construcción del prototipo virtual:
El prototipo virtual se importó en el software MCS Adams® para realizar un análisis dinámico. Una vez que se tuvo el prototipo virtual en el entorno de MSC Adams®, se procedió a colocar las uniones en cada pieza, considerando si era una conexión fija o articulada. Además, se asignaron los materiales, siendo el ácido poli láctico (PLA) para varias piezas (soportes, base móvil y eslabones), como se fabricaron para el sistema físico. Una vez que el prototipo virtual ya cuenta con las uniones, materiales y torques, se implementó un sistema de control específico para cada movimiento. En este caso, se emplearon los controladores PI para asegurar la precisión y estabilidad necesarias en los movimientos y ángulos deseados del rehabilitador. El uso de estos controladores permite ajustar dinámicamente las respuestas del sistema, contribuyendo a un buen desempeño durante el proceso de rehabilitación. Este enfoque integral, desde el diseño virtual hasta la implementación del control en el prototipo físico, garantiza una integración efectiva de la tecnología en el dispositivo de rehabilitación.
3. Resultados y Discusiones
En esta sección se presentan los resultados de simulación, del prototipo rehabilitador de tobillo, en el software de MSC Adams®, ver Figura 6. Para las simulaciones que se presentan, solo se consideran movimientos de dorsi/plantarflexión y de inversión/eversión de manera independiente con la implementación de las estrategias de control (4) y (5). Sin embargo, en el prototipo se pueden realizar ambos movimientos de manera simultánea. En la tabla II se muestran los valores máximos de los movimientos de dorsiflexión, plantarflexión, eversión e inversión.
Tabla 2 Valores mínimos y máximos de los movimientos del tobillo.
| Tipo de movimiento | Valor máximo |
| Dorsiflexión | 20.3º a 29. 8º |
| Plantarflexión | 37.6º a 45. 8º |
| Inversión Eversión | 14.5º a 22. 0º 10.0º a 17. 0º |
La Figura 7 muestra los resultados de la
simulación para el movimiento de dorsiflexión-plantarflexión (
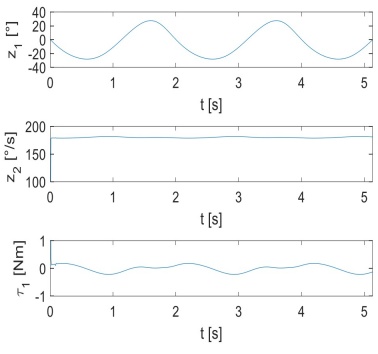
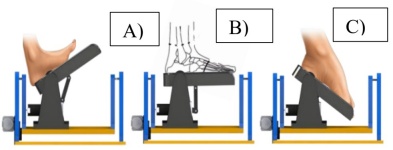
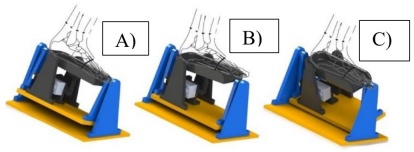
Figura 8 Prototipo virtual en posiciones máximas. A) dorsiflexión), B) posición neutral, C) plantarflexión.
La Figura 9 muestra los resultados de simulación
para el movimiento de inversión-eversión (
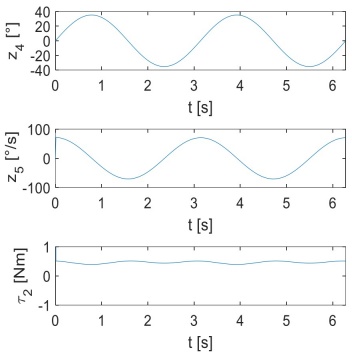
En primer lugar, el rehabilitador ofrece la posibilidad de alcanzar una amplitud de 27° para ambos movimientos de inversión/eversión. Se considera rehabilitar el pie derecho, lo que implica girar el pie hacia adentro y es esencial para fortalecer los músculos y ligamentos involucrados en esta acción, mejorando así la estabilidad y el rango de movimiento del tobillo. En el movimiento de plantarflexión se tiene al apuntar los dedos hacia abajo, y alcanza una amplitud notable de 35°.
Es importante destacar que todos estos movimientos se ejecutan a una velocidad constante, lo que permite un entrenamiento controlado y progresivo. Esta metodología de entrenamiento suave y controlada es fundamental para evitar lesiones adicionales y promover una rehabilitación efectiva del tobillo. Además, se pueden generar movimientos combinados y variar la amplitud máxima y mínima de estos movimientos ajustando la longitud de los eslabones del mecanismo de cuatro barras. Esto ayudará al paciente a realizar movimientos pequeños hasta llegar al movimiento natural del tobillo.
4. Conclusiones
En este artículo se presentan los resultados de simulación de un sistema novedoso de rehabilitación diseñado específicamente para el tobillo. El rehabilitador, impulsado por dos motorreductores que impulsan a mecanismos de cuatro barras, es de dos grados de libertad y permite no sólo ejecutar movimientos alternados, sino también realizar combinaciones de dorsi/plantarflexión e inversión/eversión de manera simultánea.
Los resultados de simulación, obtenidos a través del software MSC Adams®, muestran el desempeño de los controladores PI utilizados para proporcionar los movimientos de dorsiflexión-plantarflexión e inversión-eversión. La configuración de los elementos del rehabilitador permite que los motorreductores trabajen a velocidad angular constante y este movimiento se convierte en oscilante a través de un mecanismo de cuatro barras, contribuyendo a la durabilidad y confiabilidad al evitar los arranques y paros que exhiben los motores en las propuestas de rehabilitadores reportados en la literatura, además que reproducen la cadencia del movimiento de la articulación en condiciones de caminata.
Los resultados de la investigación demuestran que los movimientos proporcionados por el rehabilitador son armónicos y continuos. Con estos movimientos es posible automatizar las rutinas de rehabilitación y liberar al terapeuta de una actividad manual repetitiva, además de que la rutina de rehabilitación se puede realizar en casa con la asistencia remota del terapeuta.

