











 nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1 Introduction
VANET vehicular networks, using the IEEE 802.11p wireless radio interface, provide vehicle-to-vehicle (V2V) and/or vehicle-to-infrastructure (V2I) communications. These make it possible to optimize road safety and traffic management, and to make road users' journeys more comfortable thanks to the diversity of services offered.
In order to establish a sound inter-vehicular communication taking into account the highly dynamic topology that exclusively characterizes VANETs, several routing protocols adapted to these networks have been implemented, namely; Topology-based routing protocols, Geographic location-based protocols, Cluster-based routing protocols, Multicast-based routing protocols and Broadcast-based routing protocols [1-6].
Several studies [7-13] have shown that geographic routing protocols are more efficient as they are more stable, more resilient to high mobility in VANET wide areas and generate less overheads compared to other VANET routing classes.
Notably Greedy Perimeter Stateless Routing (GPSR) [14], a protocol that relies on the current geographical position of its neighbors and that of the target destination to make packet forwarding decisions. It is a popular, innovative protocol, not yet standardized, but growing rapidly.
However, the considerable occurrence of problems such as link breaks, traffic overload on a link or node (congestion), frequent network disconnection resulting in high packet loss, increased end-to-end delays (latency/jitter) and reduced path lifetimes remain as obstacles to the achievement of VANETs.
GPSR has been improved several times in order to overcome a given problem or improve a metric. It is in this context that we present in this paper a new solution tolerant to link failures, link overloads and abrupt network disconnections (traffic load/congestion) applied on the GPSR protocol. The improvement is mainly defined using an elaborate multi-criteria analytical model that guarantees a stable, reliable and uncongested selection of the best potential next hop at an estimated optimal cost.
The rest of the paper is organized as follows: Section 2 reviews related work on geographic routing over VANETs with a focus on improved GPSR protocols. Section 3 presents our motivation. Section 4 describes in detail the proposed approach with an overview of the developed analytical model and its implementation. Section 5 is dedicated to the experimentation and discussion of the results. Finally, we close the article with a conclusion in section 6.
2 Related Works
One of the major challenges for the successful deployment of VANETs is to provide a coherent routing system that allows it to remain functional in case of interruptions (failures). Therefore, different solutions and improved geographic protocols for this purpose are proposed in academic circles, of which we cite the most widespread.
In [15] the authors propose cross-layer weighted position-based routing (CLWPR) to improve the performance of geographic routing in VANETs. CLWPR approach relies on the location of candidate vehicles and the quality of the link layer from navigation. Compared to GPSR, CLWPR shows better performance of packet delivery ratio and end-to-end delay measurements.
In [16] the authors propose a new reliability-based GPSR protocol called (GPSR-R). It was designed to bypass link breakage which often results in significant packet loss. Indeed, the selection of the next hop is based on the reliability of the link. It is the probability that a link will be active for a limited time. The latter is calculated by the tagged vehicle for each of its neighbors, stored in the neighborhood table and updated periodically. As a result, the nodes using links with a reliability factor greater than a given threshold are selected for the construction of the path between evening and destination for the routing of the data.
In [17], the authors propose quantitatively measuring the communication quality of links, by calculating the integrated data transmission cost (IDTC). This cost is a function of node mobility, channel interference and cognitive nodes, the workload on a specified channel, and the distance between the relay and the destination node. Finally the authors propose the Coherent Routing and Channel Assignment (J-SRCA) protocol, based on mobility prediction for network throughput maximization. Where each hop link is simultaneously assigned to a bypass channel interference during a route configuration.
In [18] the authors propose an improved DGF protocol called Directional Greedy Forwarding (DGF- ETX) for VANETs. It integrates the well-known link quality estimation metric, ETX, into a multi-metric routing function that takes into account the distance and direction of candidate transmitters. This protocol uses a passive link quality estimation scheme that does not introduce additional active control packets into the network. The system architecture of DGF-ETX consists of three main modules: HELLO Protocol Module; responsible for generating messages to discover direct neighbors and know their mobility (speed and position), Link Quality Estimation Module; which uses Expected Transmission Count (ETX) metric designed to select routes with high end-to-end throughput and lower loss rates in both directions of the link and Routing Protocol Module which uses a unicast and multihop broadcasting scheme based on applying the multi-metric weight function before sending each packet and select the neighbor with the minimum value as the next hop.
In [19] the authors propose an improved prediction-based GPSR protocol, named GPSR+PREDICT, which focuses on exploiting the information available in the GPS and not used by the GPSR to reduce link breakage leading to bad routing decisions. Therefore, each node estimates its future position based on the information of its current geographical position, its speed and its direction. This new position is inserted into Hello packets and updated periodically.
Adaptive GPSR (AGPSR) [20] is based on bypassing routing loops. AGPSR uses "neighbor trust status" to better manage the greedy routing process, and the right-hand rule of the perimeter mode is modified by "continuous greedy mode" recovery algorithm.
In [21] the authors present the protocol called M-GEDIR (Multi-metric Geographic Distance Routing). This protocol proposes a new geographic routing technique based on the selection of next-hop vehicles from dynamic routing regions and takes into account the main metrics of urban environments, including received signal strength and future vehicle position. The routing decision made by the proposed protocol helps to reduce the probability of link failure.
In [22] the authors propose a new and improved GPSR protocol based on prediction as its name suggests: Prediction based Greedy Perimeter Stateless Routing (PGPSR). The main idea of PGPSR is to redefine the structure of hello and query packets by adding the direction of movement and the speed of the nodes. These two criteria are taken into account before each broadcast to predict the new position of nodes in the next time slot. Thus, PGPSR can easily provide the selection of the right next hop and the best path that leads us to the target without any routing loops.
In [23] the authors propose a Modified GPSR Routing Protocol (MGPSR); to improve the search for the correct path to the destination. The MGPSR transmission process consists of adopting the GPSR perimeter forwarding phase as such and reformulating the greedy forwarding phase by measuring the performance of the next nearest hop communication before each data packet transmission. This measure is calculated via a formula based on a weight entity that shows the importance of neighboring nodes. The authors believe that the simulation results are visibly better in terms of packet loss reduction compared to the AODV and OLSR protocols.
In [24] the authors propose an improved version of conventional GPSR, called MM-GPSR (Maxduration-Minangle GPSR). MM-GPSR aims to improve both the instability of nodes in greedy forwarding and the path redundancy in perimeter forwarding. In greedy forwarding, the current node first determines the allowed communication area, then calculates and compares the cumulative communication times of the neighboring nodes and finally selects the neighbor with the maximum time as the next hop.
As for perimeter forwarding, in case of greedy forwarding failure, the concept of minimum angle is introduced as a criterion for the optimal next hop; thus, the current node calculates and compares the angles formed between the neighboring nodes and the destination, and then selects the neighboring node with a minimum angle as the next hop to forward packets.
In [25] the authors propose Path Aware GPSR (PA-GPSR). It aims at selecting the best path and bypassing the nodes that delivered the packets in recovery mode. PA-GPSR improves greedy forwarding by including two additional extension tables in the neighbor table and improves perimeter forwarding by replacing it with a algorithm based on the right-hand and the left-hand rules.
In [26] the authors propose an enhanced version of the GPSR protocol, as the name suggests Enhanced GPSR (E-GPSR). The objective of this protocol is to minimize end-to-end delays and control messages. In this new version, they have on the one hand eliminated the Perimeter Forwarding phase and on the other hand changed the greedy forwarding phase by a new next hop selection mechanism. The latter is based on the sum of the respective distances "between the source node and the destination" and "between the source node and the next hop". The next hop is the neighbor that provides a minimum overall distance.
In [27] the authors propose a new Fuzzy Logic Based Directional Geographic Routing (FL-DGR) protocol for urban vehicular networks. FL-DGR uses four metrics namely direction, link quality, position and available bandwidth to select the most appropriate next hop for packet transmission. In fact, it uses fuzzy logic to coordinate and analyze conflicting metrics. FL-DGR uses ETX for link quality estimation. It adopts a packet forwarding mechanism in case of network disconnection or non-uniform distribution of nodes occurs.
In [28] the authors propose a delay-based geographic routing protocol called Delay-Aware Grid-Based Geographic Routing (DGGR) for VANETs. This protocol exhaustively exploits real-time traffic information in the case of a connected link and historical traffic information if the link is disconnected, in order to make a judicious route selection for the transmission of data packets. Indeed, DGGR uses a route weight evaluation (RWE) algorithm to evaluate route segments. Given the enormous size of modern cities, the authors opt to divide the road map into a series of Grid Zones (GZ). Depending on the position of the destination, packets can be transmitted between different GZs instead of the entire city map to reduce the computational complexity, where the best path with the lowest delay in each GZ is determined.
In [29] the authors propose GPSR- with Position Prediction and Uncertainty (GPSR-PPU) for Flying Ad-hoc Network (FANET) , which improves the selection of the next node by focusing on the prediction of the position of neighboring nodes and the uncertainty of their missions. The proposed approach has been evaluated in a NS2 simulation environment and in a real platform with missions on a fire fighting scenario.
In [30] the authors propose respectively Density-Velocity-Aware-GPSR protocol (DVA-GPSR) and Enhanced-GPSR protocol (E-GPSR). They aim to reduce the link breakage problem common in VANET communications. DVA-GPSR and E-GPSR protocols improve the e best next hop selection based on distance, vehicle direction, speed variation between the target node and the candidate next hop vehicle, and the number of neighbors of the candidate next hop.
In [31] the authors propose a GPSR-two path (GPSR-2P). The GPSR-2P transmission process consists of using two different paths at the same time between the source and the destination. For this purpose; the source sends the same packet to the node closest to the destination and to the second node closest to the destination. On the other hand, relay nodes send the received packet to its neighbor using a single path as described in traditional GPSR. The authors conclude that this mechanism significantly increases the probability of receiving packets, thereby reducing the packet loss rate. However, it results in higher end-to-end delay than traditional GPSR.
In [32] the authors propose a hybrid routing protocol called Cache Agent Based Location Aided Routing (CALAR-DD). It is a combination of Distance and Direction-based location aided multi-hop routing (DD-LAR) and Cache agent based Geocasting routing (CAG). It has a two-step process. The first step is to select the neighboring vehicle with a maximum distance (near the limit of the transmission range). And a minimum direction angle to the SD line as the next hop to transmit the packet until it reaches the Geocast region. The second step infers that once the geocast region is reached, the CAG transmits the packets to the target destination using the cache agent, using the CAA and CAG algorithms.
In [33] the authors propose a link utility based geographic routing protocol called (Geo-LU).it is particularly suitable for urban environments in VANETs. it aims to improve routing performance by extending the local view of the network topology to the current carrier to include information about two-hop neighbors. Geo-LU considers the usefulness of a two-hop neighbor link by taking into account its minimum residual bandwidth and packet loss rate. Geo-LU requires the exchange of larger HELLO messages than other protocols, which include additional information related to mobility, residual bandwidth and link quality of two-hop neighbors. Nevertheless, the benefits of including this additional information outweigh this overhead.
In [34] the authors propose a QoE-based geographic routing protocol for video broadcasting over VANETs, called GeoQoE-Vanet. The selection process of the next relay vehicle is based on a correlated formula of QoE factors namely: position, direction, speed and link expiry time. Each vehicle records its status information, stores it locally and broadcasts it in Hello messages to neighboring vehicles. When a vehicle decides to send a video to a destination, it first selects the best routing vehicle based on the information stored in its neighbors' table, and then sends the video information to the selected vehicle, which sends the received video data back to another vehicle by repeating the same process until it reaches the destination. This proposed protocol aims to ensure better quality of service (QoS) and quality of experience (QoE) for users. However, GeoQoE-Vanet is only suitable for non-real-time and non -safety applications such as advertising and entertainment.
In [35] the authors propose a new geographic protocol called Trunk Line Based Geographic Routing (TLBGR). It is designed to overcome the data congestion problem in the traditional trunk coordinated control system. Therefore, this protocol uses the traffic flow of the trunk lines and the bi-directional multi-lane road network to provide a real-time data transmission routing scheme. The TLBGR selection process is subdivided into two parts: the selection of the next intersection based on different vehicle densities, and the selection of the next hop in the selected segment between the current and next intersections is performed using the Analytic Hierarchy Process (AHP).
In [36] the authors propose an improved geographic routing scheme, called Geo-CAP, for VANETs (urban areas only). It is in fact a scheme to select the next node according to its mobility with respect to the destination and the dynamic behavior of its link with the current transfer node. Therefore, it is based on a cross-layer model of link dynamic behavior (LDB), which takes into account the loss rate and physical interference, including queuing and retransmission delays on a wireless link. Based on the simulation results obtained, the authors believe that by selecting more reliable links and reacting in a timely manner to varying node load and network conditions, the proposed protocol can offer considerable performance gains by reducing packet loss and delay.
In [37] the authors propose a drone (unmanned aerial vehicle (UAV)) assisted adaptive geographic routing with Q-Learning. In the air component, the global routing path is computed by fuzzy logic and depth-first search (DFS) algorithm using the information collected by the UAV, such as global road traffic, which is then transmitted to the requesting vehicle on the ground. In the ground component, the vehicle maintains a fixed size Q-table converted with a designed reward function and forwards the routing request to the optimal node by consulting the filtered Q-table according to the global routing path.
In [38] the authors propose a new geographic routing protocol named Epidemic and Transmission-Segment-based Geographic Routing (ETSGR). Its purpose is to carry an analysis of the vehicle state, direction, traffic density and link quality. ETSGR mainly uses the epidemic algorithm to find the vehicle state based on the SIR model (susceptible, infected and recovered). In addition, the position of the vehicle and the search for the head node of the network are used with the help of the Geographic Routing Based Transmission Segment Protocol, which analyzes each node to form segments and find the destination to transmit the data in a timely manner. Nevertheless, ETSGR has some shortcomings with respect to timing, which is expected to improve even with an increase in the number of vehicles and different route segments.
In [39] the authors propose a stable geographic protocol based on the position and structure of the backbone, dedicated to VANETs. Its routing process consists of two complementary algorithms (1) bridge node selection algorithm: considers traffic lights at intersections as bridge nodes, which evaluate routes by exchanging control packets, and select the best route based on the path weight. (2) Route update algorithm: in which the bridge nodes regularly update the route. Indeed, before the reception of each transmitted data packet, the destination communicates to the bridge nodes its previous and current geographical coordinates as soon as it passes through an intersection. Thus, the bridge nodes transmit this packet to the new location of the destination by a more reliable path with a lower number of hops.
In [40] the authors propose a new energy-efficient geographic routing protocol called "Improved Energy-aware and delivery Guarantee Geographic Routing protocol" (IEGGR), adapted to sensor networks. This protocol aims, on the one hand, to minimize the consumption of energy resources of the nodes during the communication of data in the network, by introducing a mechanism to calculate the shortest path based only on the position of the neighborhood. And on the other hand, to maximize the packet delivery guarantee by introducing a recovery mechanism that transfers packets around empty areas. Nevertheless, the proposed approach has a limitation, namely the problem of "very big voids" generating important data losses.
In our previously proposed work [41] a new version of the traditional GPSR protocol is presented. It is a link breakage tolerant GPSR protocol named Position Predictive with Threshold-GPSR (PPT-GPSR). It is based on the prediction of the future position of each vehicle and a minimum threshold of the neighbor coverage area. PPT-GPSR is primarily designed to ensure the selection of the nearest potential neighbor, expressed in predictive distance and its location with respect to the threshold that delimits the communication radius exit. This ensures the selection of the shortest path between a source and a destination while avoiding disconnections and link breaks. Our routing strategy is based on two processes.
The pre-selection process: Unlike basic GPSR, we have integrated a pre-selection procedure that helps to better identify the neighborhood for better decision making. It consists of three basic steps: the current node maintains the history of received Beacon messages and computes the predictive position of its neighbors and compares it to the threshold to derive the set of pre-selected nodes with a predictive position smaller than the given threshold. The second selection process: if the received data packet is marked in Greedy forwarding mode, the current node immediately calculates the future distance between its preselected neighbors and the destination based on the predicted position and then selects the neighboring node with a minimum distance as the next hop to elect the packets But if the data packet is transmitted in perimeter forwarding mode it first tries to switch to greedy mode otherwise it will be transmitted to the first hop that is counter-clockwise (application of the so-called right hand rule) to reach the next hop.
3 Motivation
Geographic routing protocols are responsible for establishing a good path between a source and a destination based on the position with maintenance of these paths. However, in case of link breaks, path repair is required. Given the high mobility and its consequences (link breaks), the overloading of nodes and its consequences (congestion, increased delays), the poor quality of the link and its consequences (disconnections, interferences), the curative repair of a path due to a failed link is costly.
In this context, we propose a preventive solution, tolerant to link failures and avoiding congestion. The objective is to keep the communication network operational with failure prediction. Therefore, we define a multi-criteria cost function that selects the next hop in a path between source and destination based on the distance between the node and the destination, the mobility of the nodes, the load of the traffic passing through that node and the link quality between two neighboring nodes.
4 Proposed Approach
We propose an analytical model applied to the GPSR protocol. The goal is to guarantee a more efficient geographic routing, tolerant to link failures and traffic congestion. This solution is based on a multi-criteria cost function that allows the selection of the nearest stable, reliable and non-congested neighbor. The function is expressed in terms of predictive distance, degree of mobility, node load and link quality.
4.1 Analytic Model
Let be a node (Ni) among a set of nodes (N) belonging to a path (P) between a source (S) and a destination (D).
The cost of selecting the node (Ni) as the best next hop; meeting the following four criteria:
— Short distance: Ni is closer to the destination D,
— Stability: Ni has low mobility,
— Non-congestion: Ni has a low traffic load,
— Reliability: Ni represents the link termination with the best transmission (signal) quality between Ni and its predecessor (Ni).
It is formulated as follows:
where:
SMN(Ni) : Selected Mobility of Node Ni,
STL (Ni) : Selected Traffic Load transiting node Ni,
,SLQ (Ni): Selected Link Quality to the next hop (between Ni and Ni).
α, β, λ and 𝛾: are weighting factors.
In this context, our new best path search process refers to select as the best next hop the node (Ni) with the: minimum predictive distance between it and the destination, low mobility, lowest traffic load and maximum link quality between it and its predecessor (Nj).
In the following, we detail the formulation and calculation of each parameter at node and link.
a) Distance
This is the (future) predictive distance between each node Ni and the destination D, based on the predictive position of each node which will be described in the next section (4.2). The Predictive Distance (PD) is formulated as follows:
with:
Thus, we formulate the ratio of the final distance between Ni and the destination D to the distance of the entire neighborhood of its predecessor Nj from the same destination D as follows:
with:
M: number of neighbors of Nj,
Nj: predecessor of Ni.
b) Mobility
The degree of mobility of a node Ni, in the coverage area of its predecessor, corresponds to its instantaneous speed described in the next section (`4.2), we define this degree of mobility by the following notation:
with :
Thus, we formulate the mobility ratio of Ni, in the coverage area of its predecessor, to that of the entire neighborhood in the same coverage area as follows:
with:
M: number of neighbors of Nj,
Nj: predecessor of Ni.
c) Node Load
The load of a node represents the quantity of traffic passing through that node. The greater the amount of traffic, the greater the node load. The node load is first calculated periodically at each neighboring node and encapsulated in the TL field added to the beacon to be sent just before broadcast. This calculation is done according to the following formula:
with:
PS= size of the transiting packet Ni (extracted from the size field of each received data packet),
E= number of entries in the Ni routing table,
Finally, we formulate the ratio of the traffic load transiting a node to that transiting its predecessor's neighborhood:
with :
M: number of neighbors of Nj,
Nj: predecessor of Ni.
d) Link quality
In order to ensure the reliability of communicative links, we define their quality as follows:
with:
LQ (Ni): Link quality between two neighboring nodes (Ni, Nj)
SINR (Nj, Ni): Signal to Interference Ratio, is the quotient between the received signal power and the interference from other signals using the same frequency band.
SE (Nj): Signal Strength Emitted of ``the node
SR (Ni): Signal Strength Received from the node
Noise: signal noise.
Interference: waves disturbing the signal.
The link quality is measured periodically at each end node (neighbor, receiver) and encapsulated in the new LQ field added in the beacon packet. We formulate the link quality ratio between Nj and Ni versus that between Nj and its entire neighborhood as follows:
with :
M: number of neighbors of Nj,
Nj: predecessor of Ni.
e) The node cost function
Following equations (1), (6), (10), (12) and (15), we formulate the cost function of node CN(Ni) as follows:
α, β, λ and γ: are weighting coefficients depending on whether one wants to focus on nodes with a small estimated predictive distance between each neighbor and the destination, low mobility and node load, or high (good) signal quality. Because mobility and node load affect the link quality, the three parameters complement each other. Therefore, we give priority to the link quality which guarantees reliable decision making (selection), followed by the predictive distance, while mobility and traffic load will be given equal weight:
Therefore, we privilege nodes with a strategic predictive position towards the destination, and a better link quality towards the next hop, we consider mobility and load with the same weight.
4.2. Proposed Approach Implementation
In order to optimize the process of finding the best next hop, the implementation of our proposed approach essentially distinguishes three complementary phases:
a) Destination Verification Phase
Contrary to GPSR and PPT-GPSR [41] which only check if the destination address corresponds to that of the current vehicle, in this paper we have introduced a second procedure which checks the existence of the destination vehicle in the neighborhood of the transmitting vehicle (Nj) before each data packet is sent.
This procedure makes it possible to bypass the recurrence of calculations linked to the process of searching for the best next hop, which generates a significant loss of time in the case where the destination is a direct neighbor of the transmitting vehicle (Nj).
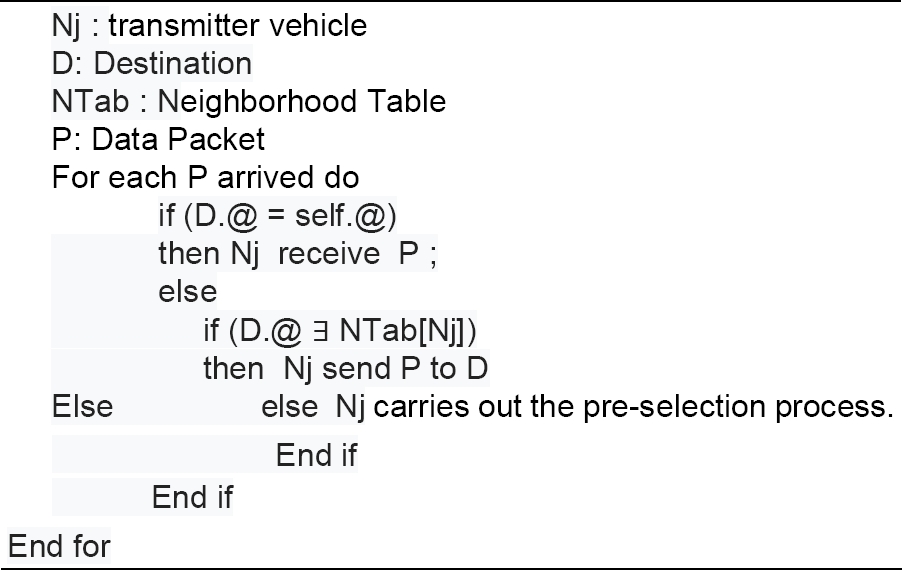
In other words, before the transmission of each data packet, the transmitter (Nj) first checks,
— If the destination address (D) exists in its neighborhood table.
— Then (Nj) transmits this Data packet directly to (D)
— Else (Nj) proceeds to the process of searching for the best Next Hop (relay) starting with the pre-selection phase.
b) Pre-selection phase of potential hops:
We found it crucial to insert again a pre-selection procedure on the GPSR protocol; similar to the one mentioned in our previously proposed PPT-GPSR protocol [41] but more improved.
It consists in a preliminary selection of a set of potential neighbors among which only one will be elected (selected definitively) as the best next hop. This process contributes to a better understanding of the neighborhood for a good decision of the future best next hop. Four steps are necessary for a complete pre-selection, which we mention below.
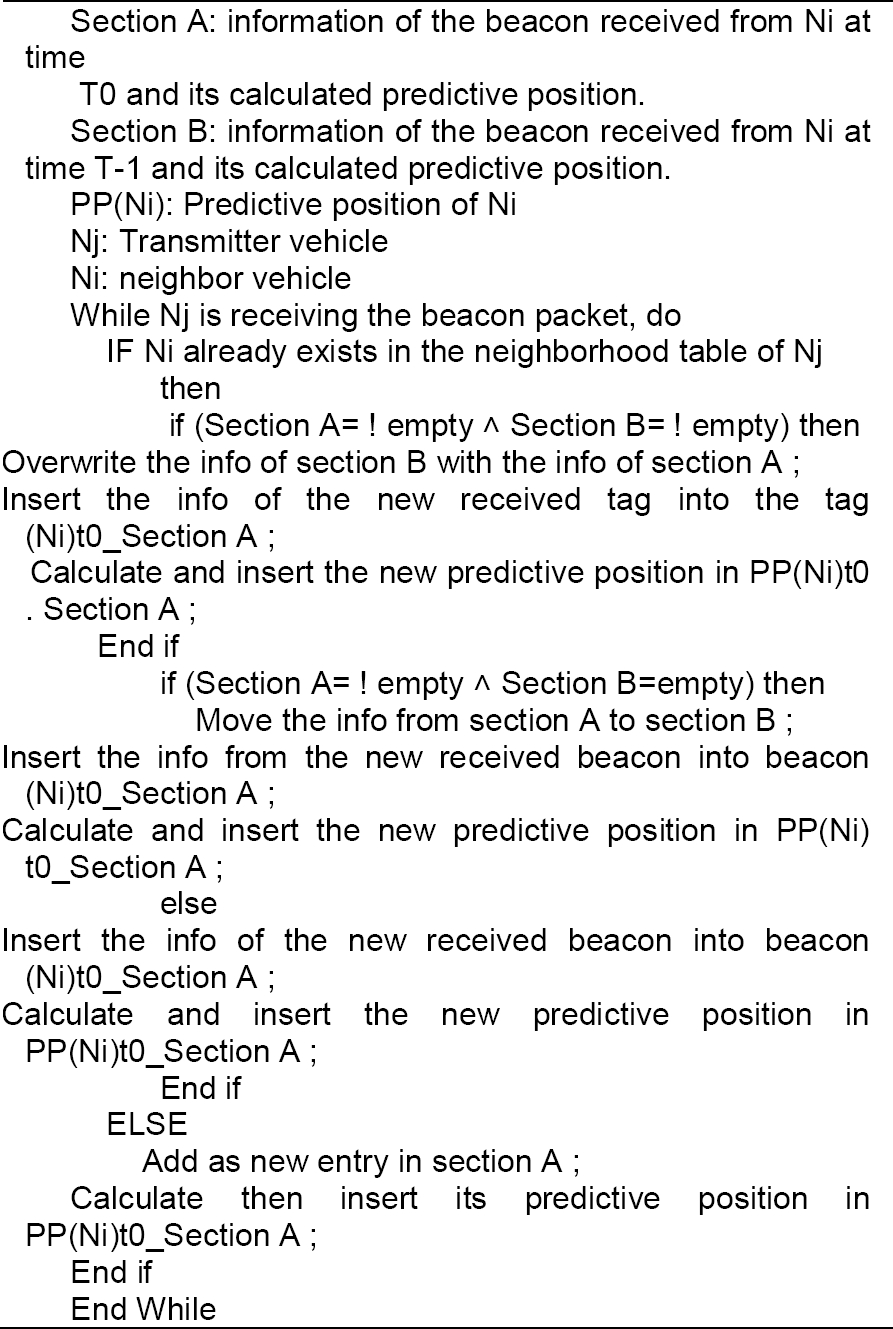
Step 1: Maintain Beacon Message History
This step is based on saving the previous Beacon trace (time t-1) for each neighbor Ni. This means that when a new Beacon is received (time t0), for each neighbor Ni (Beacon (t-1) and Beacon (t0)), it is instantly saved in the new neighborhood table (see table 2).
Table 1 GPSR beacon packet format
| ID vehicle | Geo-coordinates of s vehicle | Time stamp | Traffic Load | Link Quality | Size of packet | |
| @ | Xt0 | Yt0 | TS | TL | LQ | Size |
Table 2 The new format of the neighborhood table
| Identification | Section B Information collected from the beacon received at time t-1 (Before last beacon) and the calculated predictive position | Section A Information collected from the beacon received at time t0 (Last beacon) and the calculated predictive position | ||||||||||||
| Beacon (Ni) t-1 | PP(Ni) t-1 | Beacon (Ni) t0 | PP(Ni) t0 | |||||||||||
| ID neighbor | Geo-coordinates of neighbor | Time stamp | Traffic Load | Link Quality | Predictive position of neighbor | Geo-coordinates of neighbor | Time stamp | Traffic Load | Link Quality | Predictive position of neighbor | ||||
| @ | Xt-1 | Yt-1 | TS | TL | LQ | Xp | Yp | Xt0 | Yt0 | TS | TL | LQ | Xp | Yp |
Step 2: Calculation of the Predictive Position
Each node (Nj) is responsible for calculating the future position of its moving neighbors and injecting it periodically (instantaneously) into its neighborhood table (see Table 2). We formulate the predictive position as follows:
with:
PI(Ni) :Initial position of the neighboring node (Ni) retrieved from the received Beacon.
Displacement: Displacement of the neighboring node (Ni).
BRTt0: Beacon Reception Time (at time t0).
BRTt-1: Beacon Reception Time (at time t-1).
Speed: This is the instantaneous speed of each node which we calculate according to the known formula V=d/t for each axis as follows:
with T=(t0-t-1): time interval between 2 Beacons.
The final formula for the predictive position at time t is as follows:
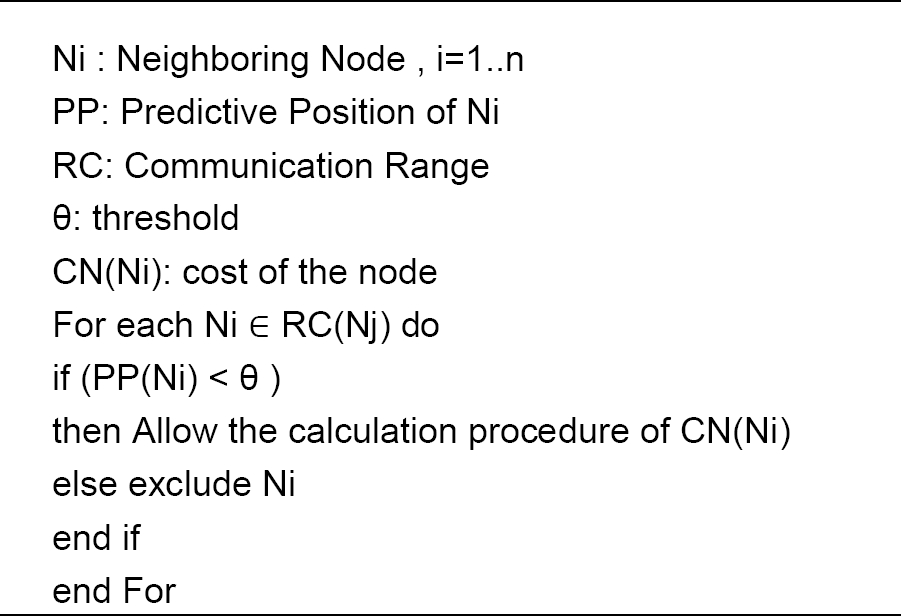
Step 3: Threshold comparison
In this last step each transmitter node (Nj) is asked to compare the calculated predictive positions of its neighbors with a given threshold and decide who to deny and who to allow access to the next hop selection process.
In other words:
— If the predictive position of a neighbor (Ni) is less than the threshold θ that delimits the output of the communication radius of its predecessor (Nj) in the interval [T0,T0+ΔT],
— Then it is allowed to proceed with the calculation of the cost of (Ni) for a possible selection of (Ni) as the best next hop of (Nj).
— Else it is imperative to exclude this node as its exit from the communication radius of Nj is imminent.
At the end of this operation, only the set of pre-selected neighboring vehicles are concerned by the selection process of the best next hop.
Step 4: Selection of the best next hop
This phase focuses mainly on the application of our cost function in the GPSR protocol for the selection of the next potential hop (closer to the destination, stable, reliable and uncongested). We distinguish three possible selection cases (depending on the transmission mode)
Case 1: when receiving a data packet marked in greedy forwarding mode,
— If the destination address labeled on it does not match that of the current retransmitting vehicle (Nj),
— Then this leads this (Nj) to calculate the cost of all its pre-selected neighboring Nodes by applying the node cost function CN(Ni) explained earlier in our proposed analytical model.
— After that, the neighbor (Ni) with the optimal CN(Ni) cost will be elected as the best next hop.
Case 2: when receiving a data packet marked in perimeter forwarding mode,
— If the distance between the retransmitting vehicle (Ni) and the destination is less than the distance between the point where the packet entered perimeter mode (Lp) and the destination,
— Then Ni switches the packet to greedy forwarding mode (back to case 1),
— Else (Ni) selects the first neighbor who is in the counter-clockwise direction as the best next hop and passes the packet to him (application of the so-called right hand rule). This continues until the destination is reached.
Case 3: When receiving a data packet marked in greedy forwarding mode,
— If the retransmitting node (Ni) is faced with a local maximum (i.e. none of the pre-selected neighbors are available),
— Then the packet switches to perimeter forwarding mode, i.e. the immediate application of the right hand rule to reach the next hop (go to Else of case 2)
Indeed, since perimeter forwarding is recursively linked with greedy forwarding on which we have introduced a new preselection mechanism as well as a (multi-criteria) cost function that selects the best next hop according to several criteria, we have optimized the process of searching for the best next hop in perimeter forwarding for performance purposes in terms of link breakage tolerance and link congestion.
4.3. Structure of the New Beacon Packet and New Neighbor’s Table
On the one hand, we have preserved all the existing fields in the traditional GPSR beacon packet. On the other hand, we have added the fields: Traffic Load (TL) and Link Quality (LQ) which are needed respectively to convey the traffic load transiting the node (vehicle) and the link quality between each pair of nodes calculated periodically at each neighboring node (Ni) and disseminated to be used for the calculation of the cost of the CN(Ni) node.
In addition to the existing fields in the original GPSR protocol neighborhood table, we have added:
— the predictive position (Xp, Yp).Section A field; on which we insert the predictive position of each neighbor calculated at the arrival of a new beacon (instant t0)
— the Traffic Load TL. Section A field.
— the Link Quality LQ. Section A field.
— an extension (section B) which encapsulates all the information conveyed through the penultimate beacon received (at time t-1), i.e. the geographical coordinates (Xt-1, Yt-1) Time stamp, the node load (TL) and the link quality (LQ), including the predictive position (Xp, Yp) calculated at the arrival of this beacon at time t-1.
-
— These additions contribute to :
In addition, this neighborhood table is updated with each entry (see Algorithm2)
5. Simulation and Results
After implementing the position prediction mechanism and the notion of threshold in the GPSR protocol via our previously proposed protocol (approach) (PP-GPSR /PPT-GPSR) [41], we implemented a multi-criteria analytical model on it (which we named OP-GPSR: OPtimal-Greedy Perimeter Stateless Routing).
In order to determine the efficiency of our proposed improved geographic protocol (OP-GPSR), various simulations were performed on (using) the NS-2.34 simulation environment [42] and compared to the traditional GPSR, PP-GPSR and PPT-GPSR protocols.
We used the topology of the city of Malaga [43]. For the experimental configuration, the different parameters used in the simulation and their brief description are presented in Table 3.
Table 3 Simulation parameters
| Parameter | Value |
| Simulation platform | NS-2 |
| Channel type | Wireless |
| Simulation Time | 500s |
| Simulation Area | 900*1000 meters2 |
| Physical Layer | Phy/WirelessPhyExt |
| Mac Layer | IEEE802_11p/802_11Ext |
| Propagation model | Two-Ray-Ground |
| Traffic model | CBR/UDP |
| Routing protocols | GPSR/ PP-GPSR/ PPT-GPSR/OP-GPSR |
| Threshold | 230m |
| Radio Range | 250m |
| Beacon period | 5s |
| Packet size | 512 octets |
| Speed of vehicle | 20 to 60 Km/h |
| Vehicle number | 20,40,80,120,160 and 200 |
| Number of traffic | 10,15,20 and 30 connections |
5.1 Performance Metrics
We study the performance of our proposed approach according to the following six metrics.
— Packet delivery ratio (PDR) is number of correctly received packets at the destination vehicle over the number of packets sent by the source vehicle.
— Packet loss rate (PLR) represents the ratio between the number of packets lost and the total number of packets sent by the source vehicle.
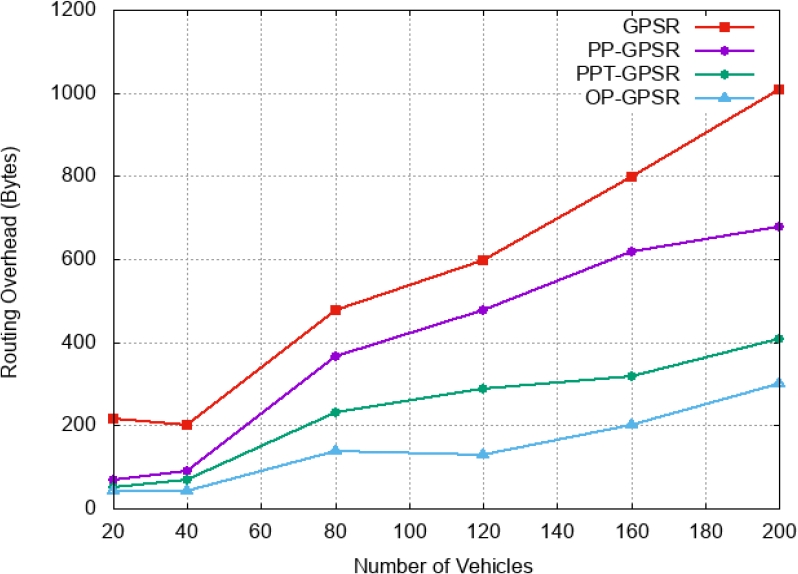
— Routing overhead is number of byte routing packets generated in the network by the routing protocol on the size of the data packets correctly received at the destination vehicle
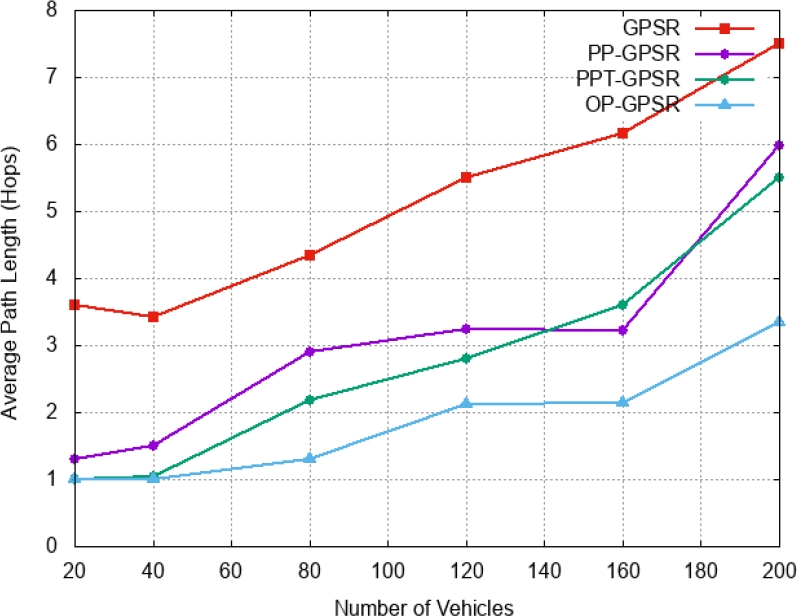
— Average path length (APL) represents the average number of hops along the shortest paths for all possible pairs of network nodes.
— End to end delay defines the average time in seconds that a data packet takes to be transmitted from the source till the destination vehicle.
— Interferences Rate (INR), represents the interference rate generated on the communication channel between the source and its receiver.
5.2 Discussion of the Results
In this section, we discuss the results of the simulation experiments carried out.
For a more appropriate performance evaluation of the OP-GPSR protocol, we found it more judicious to keep the same simulation scenarios previously used to evaluate the performance of PP-GPSR and PPT-GPSR [41].
In order to study the impact of density, we vary the number of nodes (20, 40, 80, 120, 160 and 200 vehicles) while keeping the number of connections relatively fixed (20 then 30) for each scenario.
As for the study of the impact of traffic load, we vary the number of connections (10, 15, 20 and 30 connections) using a density of 120, 160 and 200 vehicles for each scenario.
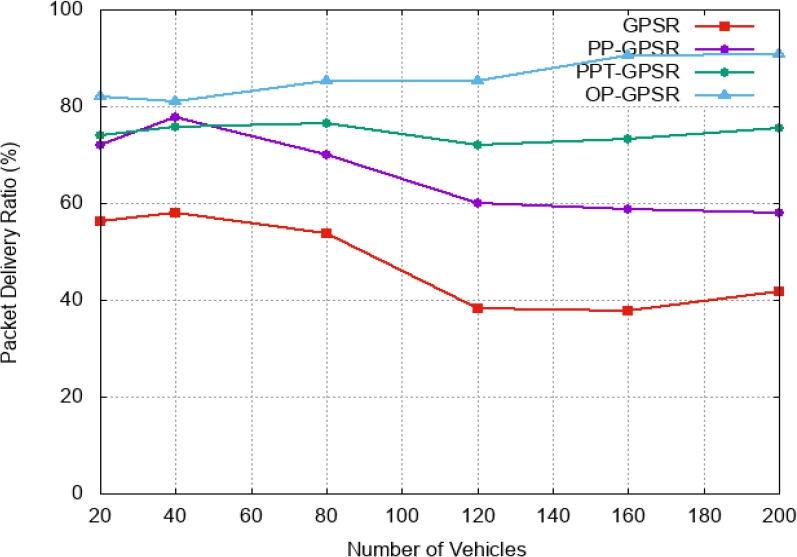
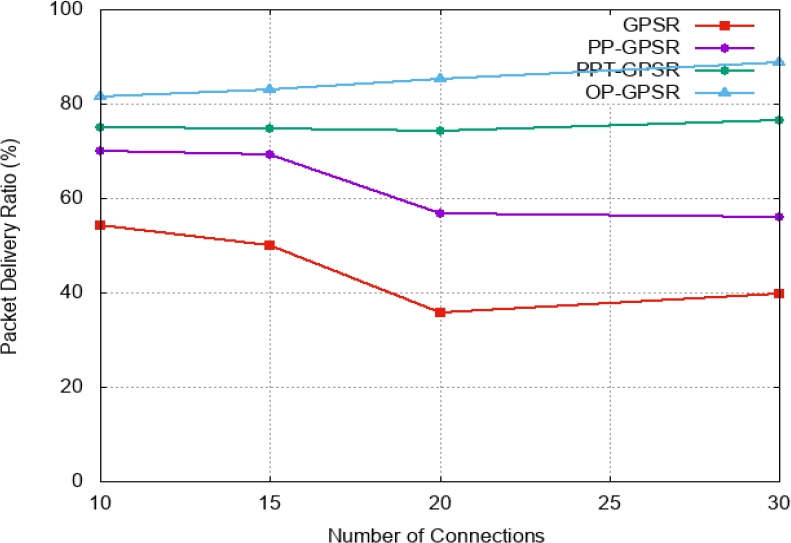
Fig. 2 and Fig. 3 represent Packet delivery ratio as a function of the number of vehicles and the number of connections respectively. We notice that Packet delivery ratio (PDR) of GPSR and PP-GPSR drops with increasing number of vehicles and number of connections. In the best case, the PDR does not exceed 58% and drops to 37% for GPSR and 77% and drops to 56% for PP-GPSR. The PPT-GPSR and OP-GPSR protocols offer significantly higher delivery rates (PRD) than the previous protocols. The PDR varies in both cases from 72% to 76% for PPT-GPSR and from 80% to 90% for OP-GPSR. This performance is due to the choice of the best next hop for establishing the best path. However, we note that OP-GPSR outperforms PPT-GPSR.
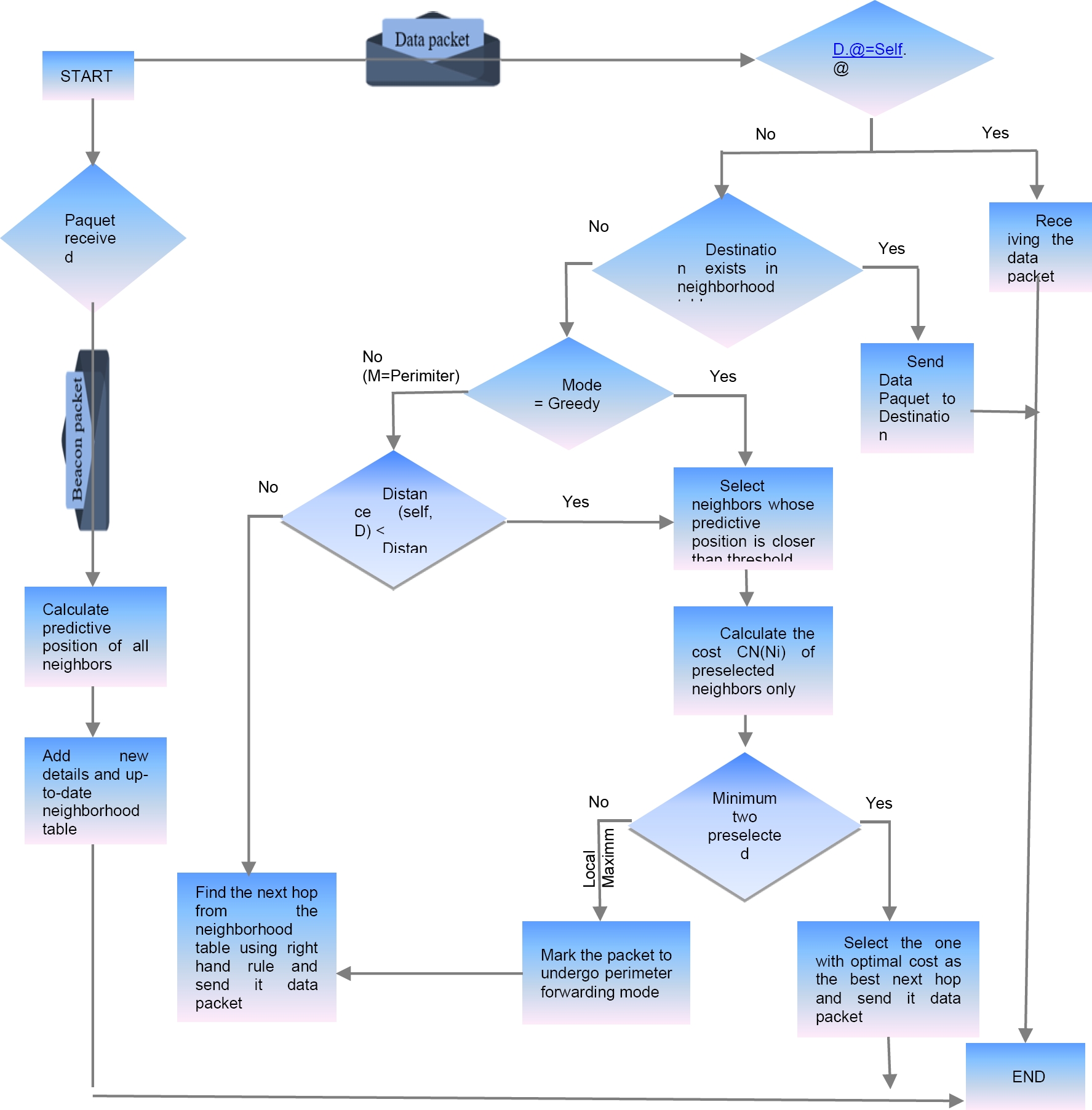
Fig. 1 The general architecture of the proposed approach. D: Destination Location, Self: current node (transmitter), Ni: neighboring node (receiver), Lp: Location Packet Entered Perimeter Mode, M: Forwarding Mode (greedy or perimeter)
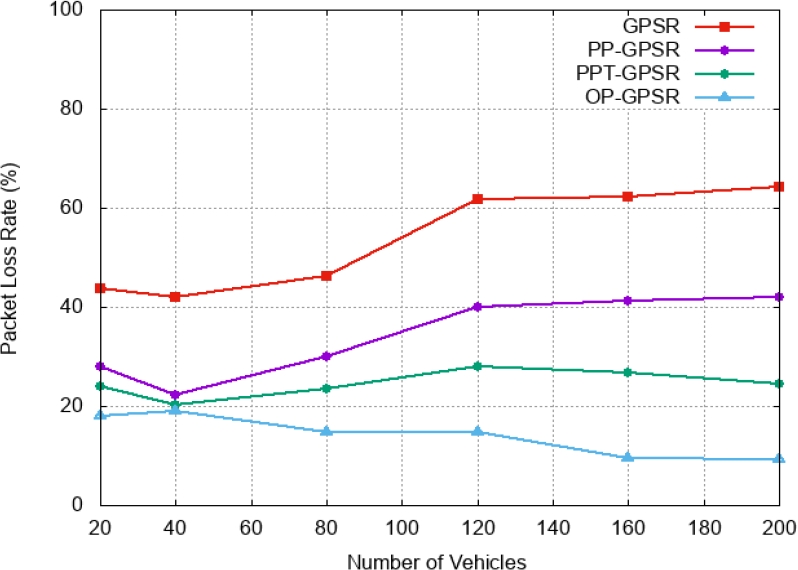
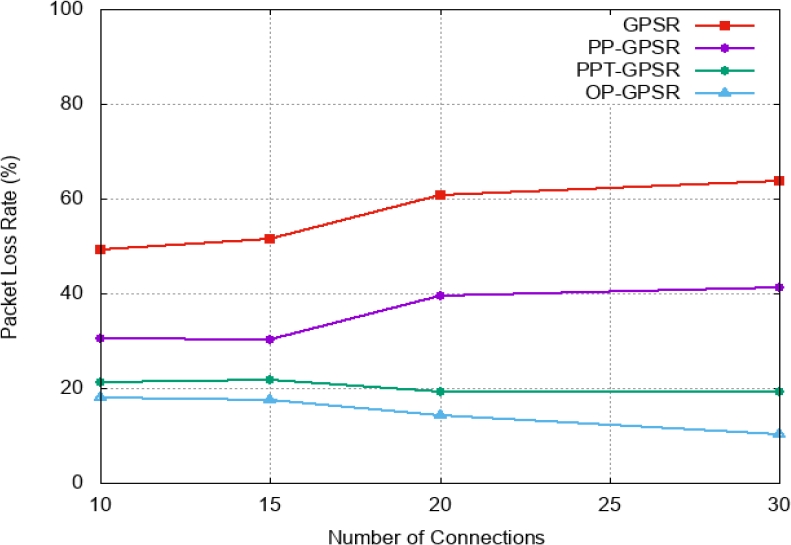
Similarly Fig. 4. and Fig. 5 represent packet loss rate as a function of number of vehicles and number of connections respectively. Considering the results, the packet loss rate (PLR) increases automatically and considerably for GPSR and PP-GPSR protocols. However, the PLR decreases significantly for PPT-GPSR and OP-GPSR. PLR reaches 24% for PPT-GPSR and only 9% for OP-GPSR.
The overhead measure is a crucial metric for the evaluation of any proposed solution. Fig. 6 shows routing overhead as a function of the number of vehicles. The large number of vehicles favours the increase of this type of packets. Only the rate of generated overheads compared to GPSR is lower by about 30% for PP-GPSR and 58% for PPT-GPSR and 70% for OP-GPSR. These results demonstrate the performance of OP-GPSR.
The average path length according to the number of vehicles (Fig. 7), for PP-GPSR and PPT-GPSR are close together. However the average path length of OP-GPSR is significantly lower compared to the other three protocols.
By increasing the number of vehicles, the routing protocols are offered several paths to reach the destination. Fig. 8 shows end-to-end delay results as a function of the number of vehicles. The PP-GPST, PPT-GPSR and OP-GPSR protocols have significantly lower end-to-end delays than GPSR. End-to-end delay of OP-GPSR is significantly lower than PP-GPSR and PPT GPSR.
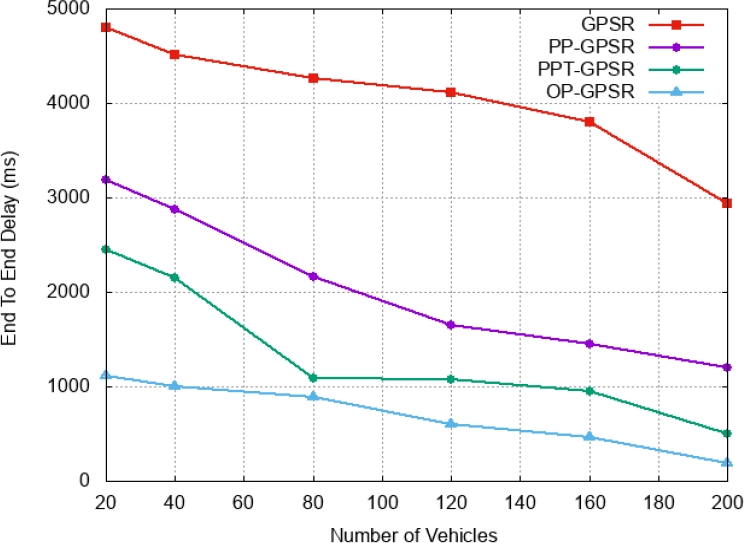
Fig. 9 and Fig. 10 represent the interference rate generated during the exchanges (transmission/reception) carried out via the GPSR, PP-GPSR, PPT-GPSR and OP-GPSR routing protocols as a function of the number of vehicles and the number of connections. It can be seen that the interference rate increases with increasing number of vehicles and number of connections for all three routing protocols except for the protocol proposed in this paper "OP-GPSR" through which this rate only decreases further.
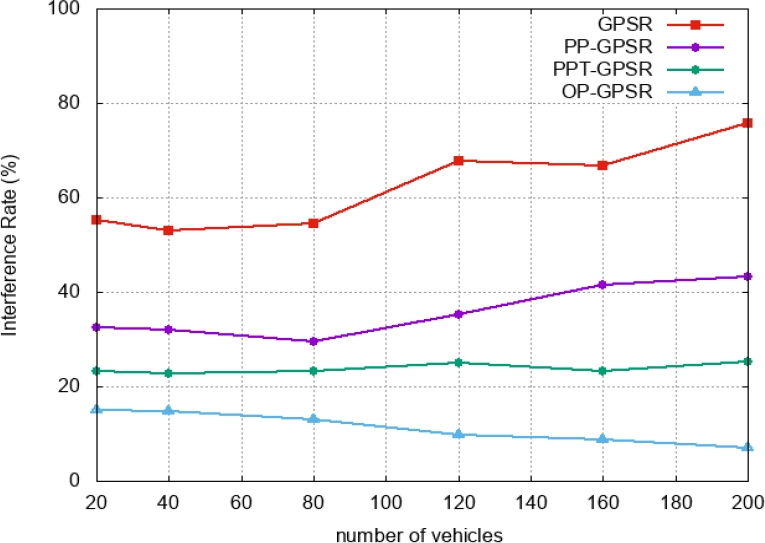
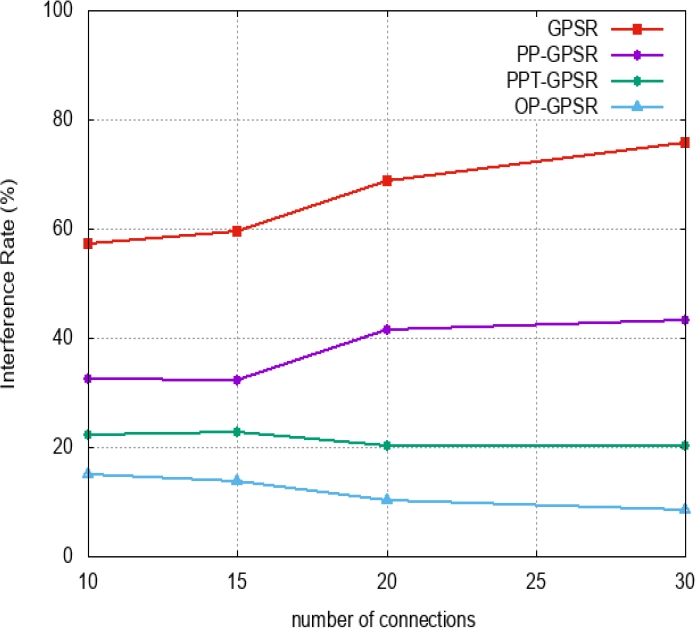
As the number of interferences increases, the SINR decreases, resulting in poor link quality and frequent disconnections and link breaks. The GPSR and PP-GPSR protocols, unfortunately, suffer from a progressive presence of interference due to overlapping with other signals using the same bandwidth, resulting in more frequent collisions and link breaks.
These performances are the result of the application of the cost function for the selection of the nodes, rich in link quality and weak with respect to the distance, mobility and load of the nodes for the selection of the best next hop, hence an optimal path.
In what follows, we present another reading of the results obtained. In Table 4 we show the average gains obtained from the three protocols compared to the conventional GPSR protocol, Fig. 11 illustrates these gains.
Table 4 Gain compared to GPSR (%)
| PP-GPSR | PPT-GPSR | OP-GPSR | |
| INR vs number of connections | -20.96 | -35.89 | -44.14 |
| INR vs number of vehicles | -20.52 | -30.35 | -41.79 |
| Average path length vs number of vehicles | -43,88 | -47,15 | -60,26 |
| End To End Delay vs number of vehicles | -48,73 | -66,32 | -75,67 |
| overhead VS number of vehicles | -30,22 | -58,69 | -73,15 |
| PLR vs number of connections | -20,65 | -32,32 | -42,75 |
| PLR vs number of vehicles | -19,52 | -28,91 | -40,16 |
| PDR vs number of connections | 18,16 | 30,24 | 41,76 |
| PDR vs number of vehicles | 18,52 | 26,91 | 41,16 |
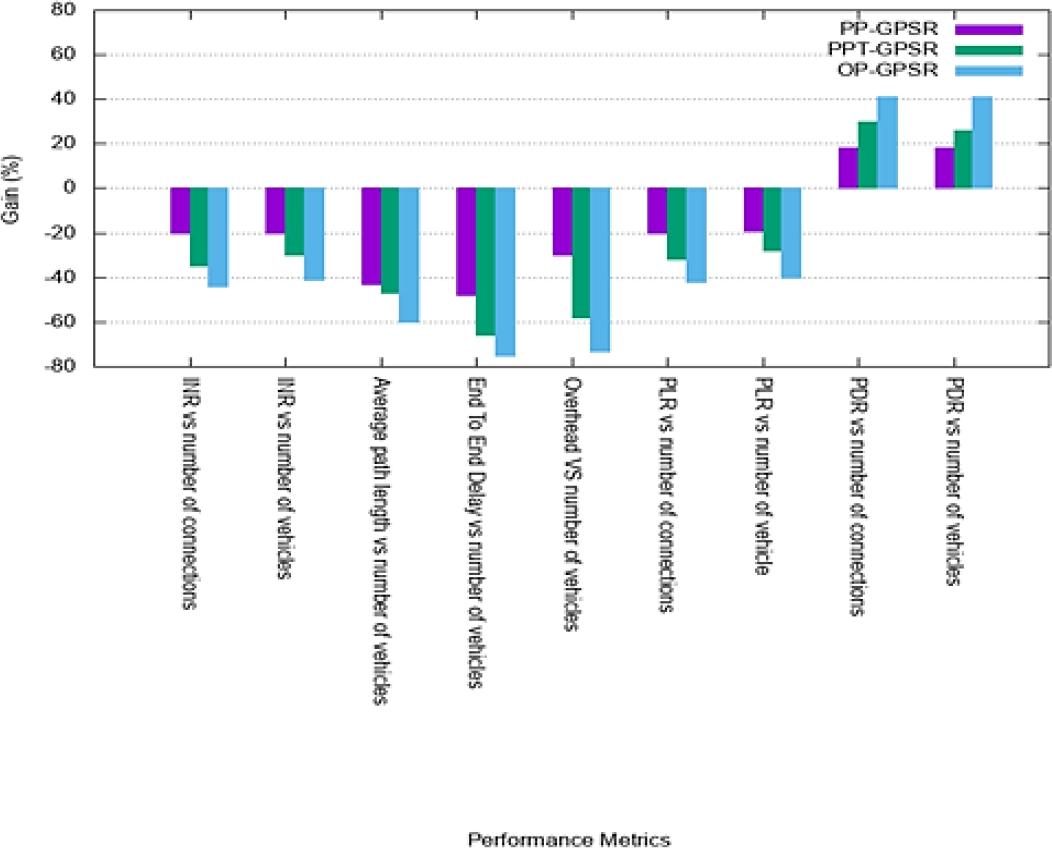
It is clear that the OP-GPSR solution offers the best performance in terms of interference rate, path length, end to end delay, overhead rate, packet loss rate and packet delivery ratio. The gain difference between OP-GPSR and PP-GPSR is in the order of about 25% while this difference between OP-GPSR and PPT-GPSR is in the order of 15%.
6 Conclusion
Due to the highly dynamic topology of VANETs, modeling and prediction of vehicle mobility is key to the design of efficient communication protocols. Indeed, our improved version of the GPSR geographic protocol named PP-GPSR relies on predictive distance calculation to select the next hop closer to the destination.
As for PPT-GPSR, to select the next hop closer to the destination, it calculates the instantaneous predictive distance and introduces the notion of the threshold of the node's coverage area to avoid the selection of nodes leaving this area.
Finally, OP-GPSR is based on the selection of the best next hop according to an estimated cost formulated by the analytical model. The performance of the proposed OP-GPSR solution is mainly due to the choice of the next hop and the generated path.
This choice is based on the selection of the closest hop to the destination with low mobility, low traffic load and high link quality.
This results in low disconnection and less frequent path breakage, resulting in higher packet delivery rates (PDR) and lower packet loss rates (PLR).
Similarly, this choice opts for a shorter efficient path to the destination, resulting in a reduction in the number of hops, which automatically leads to a reduction in end-to-end delay. We also note that routing overhead remains very low compared to the three protocols studied.
We conclude that the proposed OP-GPSR approach based on a multi-criteria analytical model offers a routing that is tolerant to link failures due to link breakage, congestion or overload.
As perspectives, we plan to augment the proposed solution with other factors such as bypassing the nodes that deliver packets in recovery mode and link failure due to unpredictable road accident.

