











 nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1 Introduction
Optimization problem-solvers aim to find solutions that minimize or maximize at least one objective function (OF). So broadly speaking, optimization problems can be divided according to the number of OF that the solver handles to obtain the optimal values; hence, there are two big groups: In the first one, the problem-solver use only one objective function, thus we are dealing with a single objective optimization problem (SOOP).
In the second group, the problem-solver compromises the solutions to satisfy in the best possible way more than one OF; these kinds of problems belong to a class known as multiobjective optimization problems (MOOP). MOOPs are harder to solve than SOOPs; consequently, through history, there have been many proposals focused on reducing obstacles in the diverse facets of the problem solver, i.e., the algorithms or methods.
Some ideas of the first proposed methods referred to as classical methods, to distinguish them from metaheuristic-based methods were classified by Miettinen in [1] as follows:
The no-preference methods use a heuristic to find a single optimal solution without assuming any information concerning the importance of the objectives. In contrast, posteriori methods use preference information about each objective and generate a set of Pareto optimal solutions [2].
The a priori methods usually find a preferred Pareto optimal solution using information concerning the preferences of objectives [3]. Interactive methods work with preference information progressively along the optimization process [4].
Three of the more popular classical methods are the weighted sum approach (WSA), the Benzon method [5], and the normal boundary intersection (NBI) [6, 7].
Regarding metaheuristic methods, Shaffer proposed to solve a MOOP using a genetic algorithm to find a solution in each run of a WSA [8]. A different way to deal with a MOOP is with a multiobjective optimization evolutionary algorithm (MOOEA), which find multiples solutions in the Pareto front in each run.
MOOEA has significantly grown since the Pareto dominance concept was proposed by Goldberg [9] and still being the preferable option to obtain a set of optimal viable solutions. The use of the NBI presents several significant drawbacks; some of them are:
− Transforming a MOOP containing 𝑀 objectives to a set of single optimization problems with
− In some runs, the NBI returns non-Pareto optimal points. A solution was given in [10], where Logist and Impe, propose a removal criterion for these points using the Lagrange multiplier vectors, then the pay-off matrix and the permutation matrix do not need further comparisons.
− It is necessary to use Robust Parameter Design when solving a MOOP with correlated objective functions [11]. This approach throws unrealistic feasible solutions in the Pareto Front; however, they can be avoided using Principal Component Analysis to obtain uncorrelated objective functions. To deal with correlated objective functions, Dias Lopes et al. [11], proposed the RPD-MNBI that combines Robust Parameter Designs, Principal Component Analysis, and Normal Boundary Intersection preserving the original correlation of the problem and reducing the effects of the noise variables.
A way to deal with the difficulty of the constraint equation in the NBI is combining it with a metaheuristic algorithm and penalize the solution that did not fulfill the constraints like the proposed by Zhang and Li in the MOEA/D [12]. The MOEA/D decompose the objective space of a MOOP in
Similarly, in [13], the NBI and the Tchebycheff method are used to guide the search in the neighborhood of the MOEA/D; in this algorithm the classic method and the evolutionary algorithms works together to solve a MOOP; however, the search direction needs to be defined yet.
Another weakness of the MOEA/d is that the recombination operators affect their performance, to solve this in [14] Luo et al. proposed the genetically hybrid differential evolution strategy for recombination that use one mutation strategy focused on the diversity and another focused in convergence.
The problems of the quick convergences and the loss of the diversity affect also the particle swarm optimization algorithms, to avoid this a fusion learning strategy that improved the leadership selection strategy is presented in [15]. The Radial Boundary Intersection based decomposition with an Interior-Point method (RBI-IP) [16] is an algorithm that also uses the NBI.
This algorithm decomposes the objective space in
Another improvement of the NBI is presented by Cui et al. [17] they use the adaptive weight sum, the adjust uniform axes method and Mahalanobis distance to get a wide and uniform distribution of the Pareto Frontier. In this paper, we propose the Normal Attractor Intersection (NAI) method and the Normal Attractor Intersection multi-objective particle swarm optimization (NAImopso).
The first one is a method inspired by the NBI [6], the improved NBI [18], and the Tchebycheff approach. The NAI avoids the a priori definition of the search direction and the equality constraints; a set of attractors that cover the entire Pareto Front are used, minimizing the normal distance to one of these attractors, then a Pareto point is obtained.
The second one is a multiobjective optimization algorithm based on decomposition; we used it to prove the ability of the NAI to obtain the Pareto front. It guides the search, and the structure of the randomly selected neighbors-particle swarm optimization (RSN-PSO) proposed in [19] adapted to deal with multiobjective optimization is used to generate new solutions.
We compare our proposal against four multiobjective metaheuristics based on the PSO that are in the state-of-the-proposals; they are the pccsAMOPSO [20] and the KGMOPSO [15]. The evaluation was achieved using three well-recognized indicators used as performance metrics; they are the hypervolume indicator, the coverage, and the ε-indicator. The experimental results showed that solutions obtained with the NAImopso were better than the solutions obtained with the other algorithms with it was compared.
The rest of this paper is organized as follows: Section 2 describes the theory of the NBI to understand the inspiration of the NAI. Sections 3 and 4 introduce the proposed NAI and NAImopso respectively. Section 5 reports the experimental results. Section 6 concludes the paper.
2 Normal Boundary Intersection
The NBI divides a MOOP with
In the NBI the first step is to find the ideal vector
where
In the CHIM,
where
Subject to:
The constraint
where
3 Normal Attractor Intersection
The algorithms that transform a MOOP into a single-objective optimization problem are easier to implement and use than the Pareto dominance-based algorithms, but the preference of each objective needs to be defined as a priori in a weight vector.
The NBI has advantages over other classical methods that obtain solutions with a better distribution on the Pareto front; in contrast, it converts a MOOP in a set of SO optimization problems with equality constraints that could be hardest to solve than the MOOP. In gradient-based methods, the Karush-Kuhn-Tucker condition is used to deal with equality constraints. In evolutionary algorithms, it is common to penalize the individuals that do not satisfy the constrains; an example is the penalty-based boundary intersection (PBI) approach [12].
In the NBI, the search direction needs to be defined. If the objective space has a convex region and a non-convex region, the direction needs to change. In [18] use the CHIMMOD, a dashed line over the axis
In our proposal, the Normal Attractor Intersection (NAI) method, the normal vector direction to CHIM, does not have to be defined a priori, which is an advantage over the
Equation (9) allows to obtain each element
Using the set of attractors, the NAI convert a MOOP in
Minimize:
Subject to:
where
Fig. 1 Graphical representation of the
The previous approach has the same problem of the
For these reasons, we propose to use a method like Tchebycheff decomposition, but instead of minimizing the maximal distance between a point and the ideal vector multiplied by a weight, we minimize the maximal distance between a point and an attractor.
To ensure that the obtained Pareto optimal point is parallel to the attractor, the angle
Minimize:
Subject to:
where
4 Normal Attractor Intersection Based Multi-objective Optimization Using Particle Swarm Optimization NAImopso
The NAImopso is a PSO based algorithm that decomposes the objective space of a MOOP in 𝑁 subproblems; each one is solved using the NAIB with different attractors. The fitness of each particle is obtained evaluating one subproblem, so the size of the swarm is
particle
To preserve the diversity and ensure to obtain a good approximation to the Pareto front, the particles in NAImopso learn from Sbest which is the particle with the best fitness in the subswarm and from RSNbest that is the best particle in a randomly selected neighborhood of size
The position and velocity of each particle
To calculate the fitness of the new position
If the fitness of the new position is minimal, assuming that it is a minimization problem, the Pbest fitness and the Sbest fitness are updated. The NAImopso pseudocode is shown in Algorithm 1; the output is the Pbest of each particle, i.e.,
5 Experiments
To test the performance of the proposed NAImopso the two objective benchmark function ZDT1, ZDT2, ZDT3, ZDT4 and ZDT6 [22] and the three-objective function DTLZ2 [23] were used. We compared the results against other state-of-the-art multiobjective metaheuristics based on the PSO; they are the pccsAMOPSO [20] and the KGMOPSO [15]. In the tests performed with the NAImopso, the number of particles used was
The number of particles in the subswarm of each particle was
A value of the size of the neighborhood that can obtain a good balance between exploration and exploitation, according to [19] is
The experiments were running in a computer with the processor Intel(R) Core (TM) i7-8650U CPU @ 1.90GHz and 16 Gb of RAM. The algorithm was implemented in C++, the mean execution time for each run was 165.21 seconds, the faster time was 44.0 seconds and the slower was 239.0 seconds.
The inverted generational distance (IGD) is used to compare the performance of the NAImopso, the IGD is a measure between the solution
where
We executed the NAImopso 30 times to obtain the mean and the standard deviation of the IGD. The results and comparisons are shown in the Table 1, we can observe that the NAImopso obtained better results than other algorithms when optimizing the ZDT1, ZDT2, and DTLZ2 problems.
Table 1 Comparative of the NAImopso, pccsAMOPSO,and KGMOPSO algorithms using the IGD in the ZDT1, ZDT2, ZDT3, ZDT4 and DTLZ2 problems
| Functions | NAImo pso | pccsAMOPSO | KGMO PSO | |
| ZDT1 | Mean | 2.20E-3 | 4.01E-3 | 4.04E−3 |
| Std. | 1.15E-3 | 6.28E-5 | 8.23E−5 | |
| ZDT2 | Mean | 5.45E-5 | 4.09E-3 | 3.98E−3 |
| Std. | 1.66E-1 | 4.81E-5 | 4.99E−5 | |
| ZDT3 | Mean | 1.30E-2 | 3.32E-3 | 5.51E−3 |
| Std. | 5.53E-3 | 9.95E-5 | 9.67E−5 | |
| ZDT4 | Mean | 2.3E-1 | 7.97E-3 | 4.21E−3 |
| Std. | 1.62E-1 | 1.47E-3 | 7.13E−5 | |
| ZDT6 | Mean | 3.33E-2 | 3.4E-3 | 3.39E−3 |
| Std. | 2.09E-2 | 2.28E-4 | 1.46E−4 | |
| DTLZ2 | Mean | 1.80E-3 | 6.14E-2 | 7.48E−2 |
| Std. | 8.71E-6 | 1.89E-3 | 2.50E−3 | |
The NAImopso does not use any non-dominated method, because of that for multimodal problems as the ZDT4 and non-uniform (ZDT6) all the solution is not in the Pareto Front, but with a non-dominated method in the last population we can remove the dominated solutions. There are different metrics (indicators) to evaluate the output quality or the different evaluated algorithms [25, 22]. In this work, we chose to perform the evaluation using the next three metrics: the hypervolume indicator
The hypervolume indicator is proportional to the distribution of the solutions $X'$ in the Pareto front; hence this metric captures the proximity of the solution set to the true Pareto front as well as its distribution in the objective space, better solution sets are those with the larger values. The additive epsilon indicator measures the smallest distance by which a Pareto approximate front
It provides a relative measurement that expresses the minimum necessary value of ϵ that should be added to the solutions $
The coverage
Table 2 Comparative of the NAImopso and MOEA/d algorithms using the
| A= NAImopso y B=MOEA/d | ||||
| Metric | ZDT1 | ZDT2 | ZDT3 | DTLZ2 |
| 3.7865 | 3.7802 | 5.3166 | 2.8787 | |
| 3.9638 | 1.9843 | 3.1667 | 3.9998 | |
| 0.4455 | 0.3069 | 0.5940 | 0.6079 | |
| 0.0099 | 0 | 0.3964 | 0 | |
| 0.1358 | 0.0271 | 0.0559 | 1 | |
| 0.0079 | 0.1095 | 0.0144 | 0.0949 | |
In the four problems, the solutions of the NAImopso cover a larger percentage of the solutions of the MOEA/d
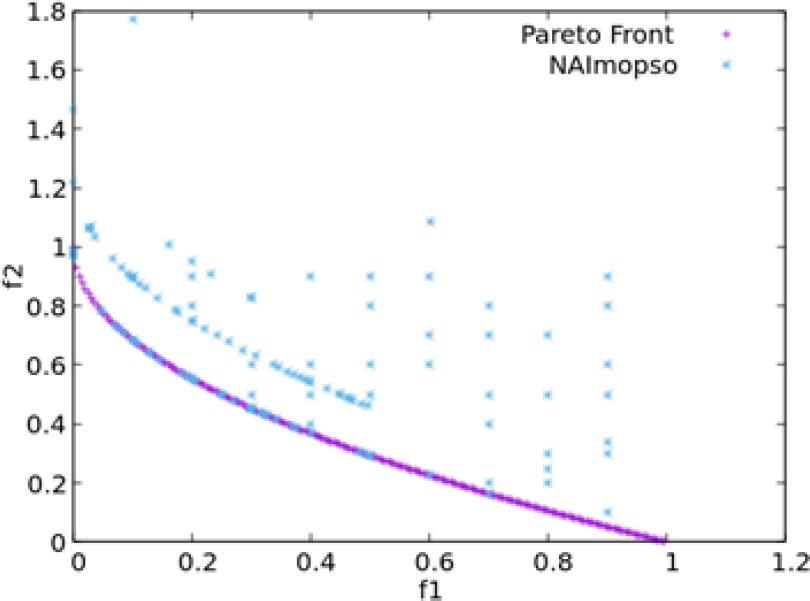
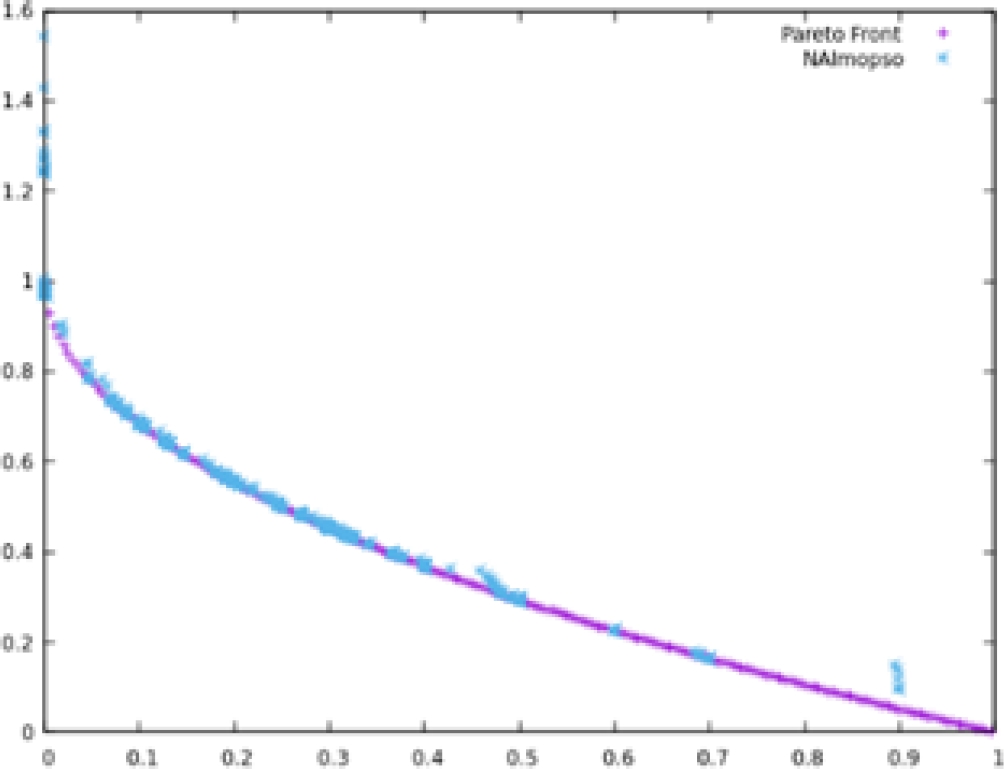
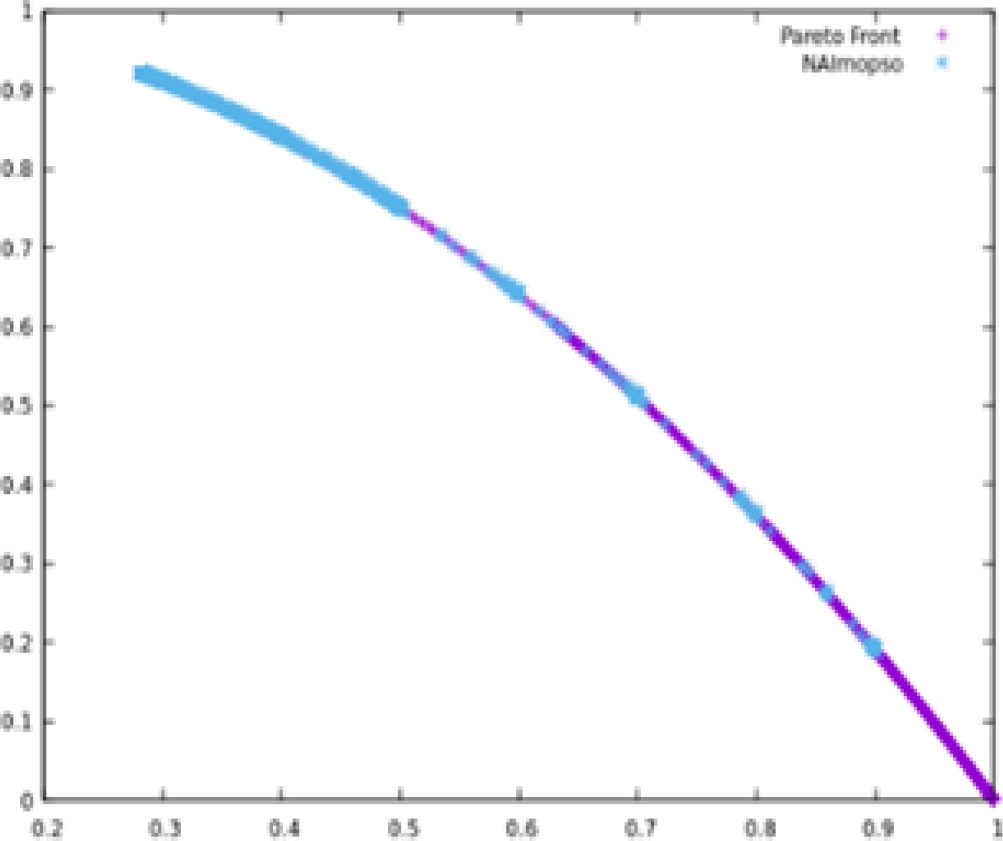
Fig. 3 We indicated the True Pareto front using a `-', the Pareto approximate front obtained with the MOEA/D with an 'x', and the Pareto approximate front obtained with the NAImopso with an '*'. (a) Pareto front of the ZDT1. (b) Pareto front of the ZDT2. (c) Pareto front of the ZDT3
In Fig. 3 (a) and Fig. 3 (b) show the results obtained for the ZDT1 and ZDT2 functions, we can observe that the solutions of the NAImopso have a better distribution on the Pareto front than MOEA/d, the above can be corroborated because the value of the 𝑆 metric is higher as can be seen in Table 2 which also shows that the coverage of the NAImopso over the MOEA/d is therefore higher. In Fig. 3 (c) we can observe that the solution of the NAImopso is closer to the Pareto front but to there are a set of points that no are non-dominated solutions.
In Fig. 4 (a) the Pareto front of the DTLZ2 function, the non-dominated points obtained with the MOEA/D, and the Pareto candidates obtained with the NAImopso are shown, the results of the NAImopso are on the Pareto front but as can see in the Fig. 4 (b) are only the solutions normal to the axis and not the entire Pareto front.
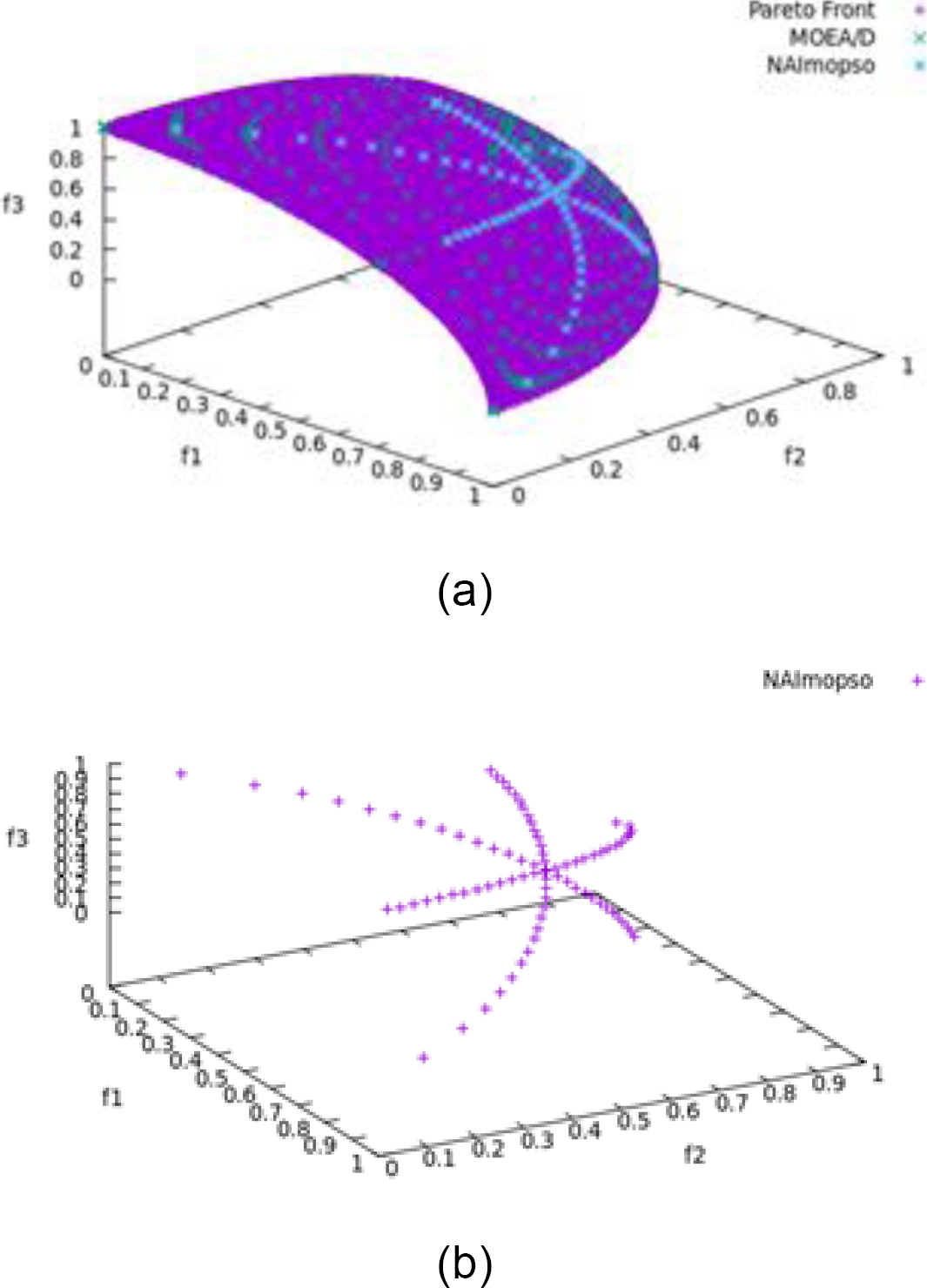
Fig. 4 Non-dominated and Pareto front candidates obtained with the MOEA/D and the NAImopso for DTLZ2 function. (a) Pareto front of the DTLZ2. (b) Pareto front of the DTLZ2 obtained with the NAImops
For the ZDT4 problem due to it is multimodal, in the final solution there are non-dominated and dominates solutions, as shown in the Fig. 5, in the solution of the NAImopso we use the algorithm proposed by Mishra and Harit [28] to find the non-dominated solutions, the final population is the show in the Fig. 6. For the ZDT6 problem, we also used the Mishra and Harit algorithm to keep only the non-dominated solutions, as shown in Fig. 7.
6 Conclusion
In this paper, we proposed the NAI and the NAImopso methods; they provide a synergetic combination of a classical method and a bio-inspired algorithm that performs better than the MOEA/d. The combination of methods allows obtaining good results without using the non-dominated search that uses most of the Evolutionary algorithms. The solutions are Pareto candidates, and we do not use any strategy to ensure that the solutions are Pareto points; however, the decision-maker could apply a non-dominated method or evaluate only the selected solutions.
For problems with three objectives, a good representation of Pareto front is obtained which in real multi-objective optimization problems could facilitate the work for the decision-maker, although the solutions are not distributed in the entire Pareto front. We compared the NAImopso with other PSO multi-objective algorithms, such as the pccAMOPSO, cdAMOPSO, clusterMOPSO, and the pdMOPSO. The IGD metric was used to evaluate the different algorithms. The NAImopso obtained better solutions when optimizing the ZDT1, ZDT3, and DTLZ2 problems. In the case of the ZDT2, the results of NAImopso were as good as those obtained with the other algorithms.
Independently of the NAImopso, the NAI can be used with other multi-objective algorithms to guide the search. Moreover, it can be used in preference algorithms and to optimize problems with many-objectives. Also, to improve the capacity to find better non-dominated solutions we can prove to add dynamic adjustment of the parameters with fuzzy logic like the proposed in [29] or use NAImopso with a Bacterial foraging optimization (BFO) as is described in [30].

