











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. Introducción
La deflexión de las vigas es el movimiento hacia abajo que hace una viga desde su posición inicial sin carga a otra posición deformada cuando se le aplica una carga. Dado que las vigas suelen tratarse como elementos bidimensionales, el eje neutro de una viga suele tomarse como punto de referencia para medir la deflexión de las vigas.
La deformación de vigas de acero estructural y concreto reforzado es una medida importante de su rendimiento de servicio, porque se requiere cumplir con los códigos de diseño actuales, y las deformaciones en las vigas consisten en deformaciones por flexión y cortante.
Muchos investigadores han estudiado la curva elástica de trabes para obtener las deflexiones máximas, pero no consideran las deformaciones por cortante. Algunos investigadores han presentado estudios sobre vigas en Voladizo no prismáticas, tales como:
Lee [9], Dado y Al-Sadder [6], Borboni y De Santis [2], Banerjee et al. [1], Solano-Carrillo [21], Chen [4], Yau [25], Brojan et al. [3].
Algunos investigadores han desarrollado modelos matemáticos para obtener la curva elástica para vigas simplemente apoyadas de sección rectangular constante sometidas a una carga uniformemente distribuida y/o carga concentrada tomando en cuenta las deformaciones por flexión y cortante para obtener las deflexiones en cualquier lugar de la viga (rotaciones y desplazamientos perpendiculares al eje longitudinal) [14, 16].
Otros autores han desarrollado modelos matemáticos y ayudas de diseño para vigas rectangulares con cartelas rectas o cartelas parabólicas en los extremos para las vigas sometidas a una carga uniformemente distribuida o carga concentrada tomando en cuenta las deformaciones a flexión y cortante [12, 13, 24, 19, 18, 8, 5, 11].
Estos trabajos muestran los factores para los momentos de empotramiento, factores de transporte o factores de arrastre y factores de rigidez. Varios autores han presentado modelos óptimos para obtener los lados de la viga y su acero de refuerzo longitudinal para secciones rectangulares con cartelas rectas o cartelas parabólicas bajo carga uniformemente distribuida o carga concentrada y momentos en los extremos [15, 10]. Las revisiones de la literatura de las investigaciones desarrolladas y/o comparadas por software se muestran a continuación: Majumder y Kumar [17] estudiaron la deflexión máxima de una viga simplemente apoyada sometida a tres tipos de carga. Las cargas son:
a) Carga uniformemente distribuida.
b) Carga concentrada en el centro de la viga.
c) Carga triangularmente distribuida.
El análisis teórico se realizó por la Teoría de Euler-Bernoulli (Deformaciones por flexión) y se comparó con el software ANSYS 14.0.
Los resultados numéricos mostraron una excelente precisión entre la teoría de Euler-Bernoulli y el software ANSYS 14.0. Debnath y Debnath [7] analizaron la deflexión máxima para diferentes tipos de vigas de sección transversal rectangular constante:
El cálculo teórico se realizó según la Teoría de Euler-Bernoulli (Deformaciones por flexión) y se comparó con el software ANSYS 14.0. Los datos considerados para las vigas son:
Los elementos sólidos estudiados fueron 188, 189, 185 y 285. El resultado más preciso fue medido por el elemento sólido 189 seguido por el elemento sólido 188 y otros elementos sólidos. los resultados fueron precisos entre la teoría de Euler-Bernoulli y el software ANSYS 14.0.
Sihua et al. [20] presentaron el análisis no lineal para una viga de concreto reforzado con ayuda del software de análisis de elementos finitos ABAQUS. La viga es simplemente apoyada y tiene
En este análisis de vigas simplemente apoyadas, se ha introducido a fondo el modelo de plasticidad del daño del concreto en ABAQUS. Finalmente, los resultados de la experimentación y el análisis ABAQUS se compararon en un diagrama, y la carga alcanzó la capacidad de
Si se hubieran considerado las deformaciones de cortante en el software ABAQUS, los resultados del software ABAQUS estarían más cerca de la prueba experimental, porque estas deformaciones tienden a aumentar las deformaciones totales para vigas.
Este trabajo presenta un modelo analítico de la curva elástica para vigas rectangulares con cartelas parabólicas, bajo carga concentrada y momentos en los extremos, considerando deformaciones por flexión y cortante (Teoría de Timoshenko) para obtener las rotaciones y desplazamientos, el enfoque principal de esta investigación. El modelo propuesto se divide en tres partes para la viga:
El modelo actual de la curva elástica para vigas rectangulares bajo carga concentrada considera solo las deformaciones por flexión (Teoría de Euler-Bernoulli).
2. Modelo propuesto
La Figura 1 muestra la diferencia entre la teoría de Timoshenko y la teoría de Euler-Bernoulli. La primera teoría incluye el efecto de los esfuerzos de flexión y cortante sobre la deformación:
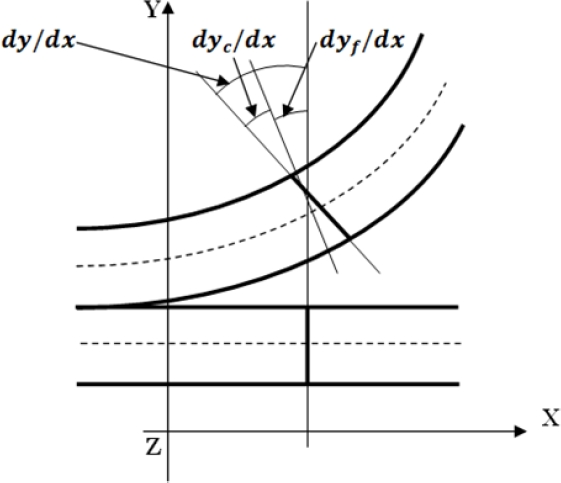
Y la segunda teoría incluye el efecto de los esfuerzos de flexión en la deformación [22, 23]:
La teoría de Timoshenko considera las deformaciones por flexión y cortante, esto es válido para los miembros cortos y largos. La ecuación de la curva elástica se presenta de la siguiente manera [22, 23]:
donde:
|
Módulo de cortante |
|
Desplazamiento total. |
|
Desplazamiento por cortante debido a la fuerza cortante |
|
Desplazamiento por flexión debido al momento |
|
Área de cortante |
|
Módulo de elasticidad. |
|
Momento de flexión alrededor del eje |
|
Momento de inercia alrededor del eje |
Las rotaciones en cualquier parte de la viga por integración de la ecuación (4) se obtienen:
En la Figura 2 se muestra la viga AB sometida a un momento en cada extremo y una carga concentrada, así como su sección transversal rectangular considerando que el ancho “
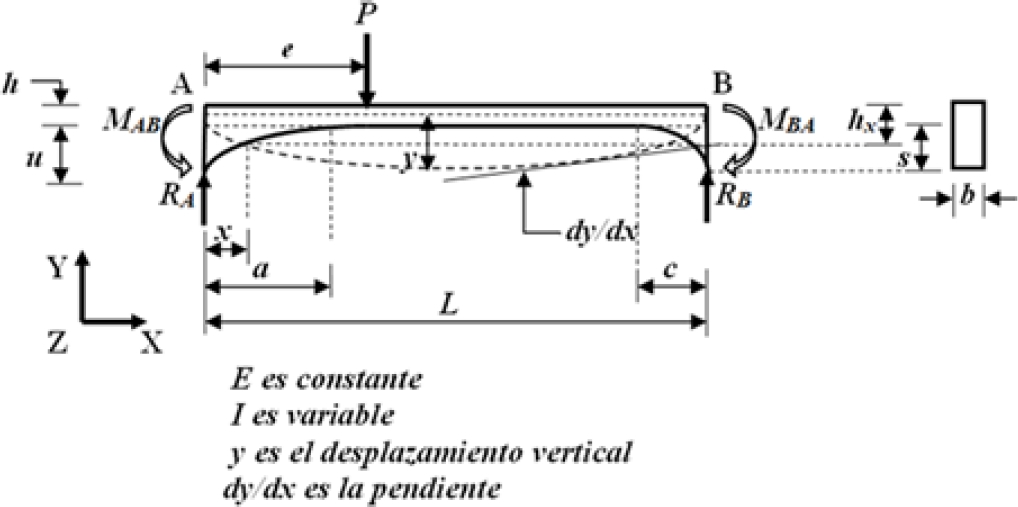
Los valores de las reacciones en los apoyos
Las fuerzas cortantes y momentos alrededor del eje
Sustituyendo las ecuaciones (8) y (10) en la ecuación (5), para
Sustituyendo las ecuaciones (9) y (11) en la ecuación (5), para
La Tabla 1 muestra las ecuaciones de las alturas “
Tabla 1 Propiedades de la sección rectangular con cartelas parabólicas
| Concepto | Ecuaciones | ||
| Intervalo | |||
2.1. Cuando la carga se localiza de
Sustituyendo las propiedades de la Tabla 1 en las ecuaciones (12) y (13) para cada intervalo, y resolviendo las integrales se obtienen las rotaciones en cualquier lugar (
Para
Para
Para
Las ocho condiciones conocidas que debe cumplir la viga para obtener las constantes de integración son:
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Ahora, sustituyendo las ocho condiciones conocidas en las ecuaciones correspondientes, se generan ocho ecuaciones para obtener las constantes de integración. Las constantes de integración se muestran a continuación:
2.2. Carga localizada de
Sustituyendo las propiedades de la Tabla 1 en las ecuaciones (12) y (13) para cada intervalo, y resolviendo las integrales se obtienen las rotaciones en cualquier lugar (
Las ecuaciones simplificadas para intervalo se muestran a continuación. Para
Para
Para
Para
Las ocho condiciones conocidas que debe cumplir la viga para obtener las constantes de integración son:
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Ahora, sustituyendo las ocho condiciones conocidas en las ecuaciones correspondientes, se generan ocho ecuaciones para obtener las constantes de integración. Las constantes de integración se muestran a continuación:
2.3. Carga localizada de
Sustituyendo las propiedades de la Tabla 1 en las ecuaciones (12) y (13) para cada intervalo, y resolviendo las integrales se obtienen las rotaciones en cualquier lugar (
Posteriormente se desarrolla la integral para obtener los desplazamientos en cualquier lugar de la viga (
Para
Para
Para
Las ocho condiciones conocidas que debe cumplir la viga para obtener las constantes de integración son:
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo la condición
Sustituyendo las condiciones en las ecuaciones correspondientes, se obtienen las siguientes: constantes de integración:
3. Aplicación del modelo propuesto
Una manera de verificar la continuidad del modelo propuesto es como siguiente:
Sustituyendo el valor de “
Sustituyendo el valor de “
Sustituyendo el valor de “
Sustituyendo el valor de “
Sustituyendo el valor de “
Sustituyendo el valor de “
Una manera de verificar el modelo propuesto en algunos puntos especiales es como siguiente:
Sustituyendo el valor de “
Sustituyendo el valor de “
Sustituyendo el valor de
La curva elástica para vigas rectangulares con cartelas parabólicas bajo carga concentrada situada en cualquier parte de la viga se obtiene, sustituyendo en las ecuaciones correspondientes de la siguiente manera:
| – | = | ||
-
-
2. Para vigas perfectamente fijadas en sus extremos: El momento
–
–
–
–
–
–
–
–
–
De los dos modelos (MP y MA), estas dos ecuaciones se resuelven para obtener “
–
–
–
–
–
–
–
3. Para vigas usando los mismos momentos y reacciones son del modelo propuesto para los dos modelos.
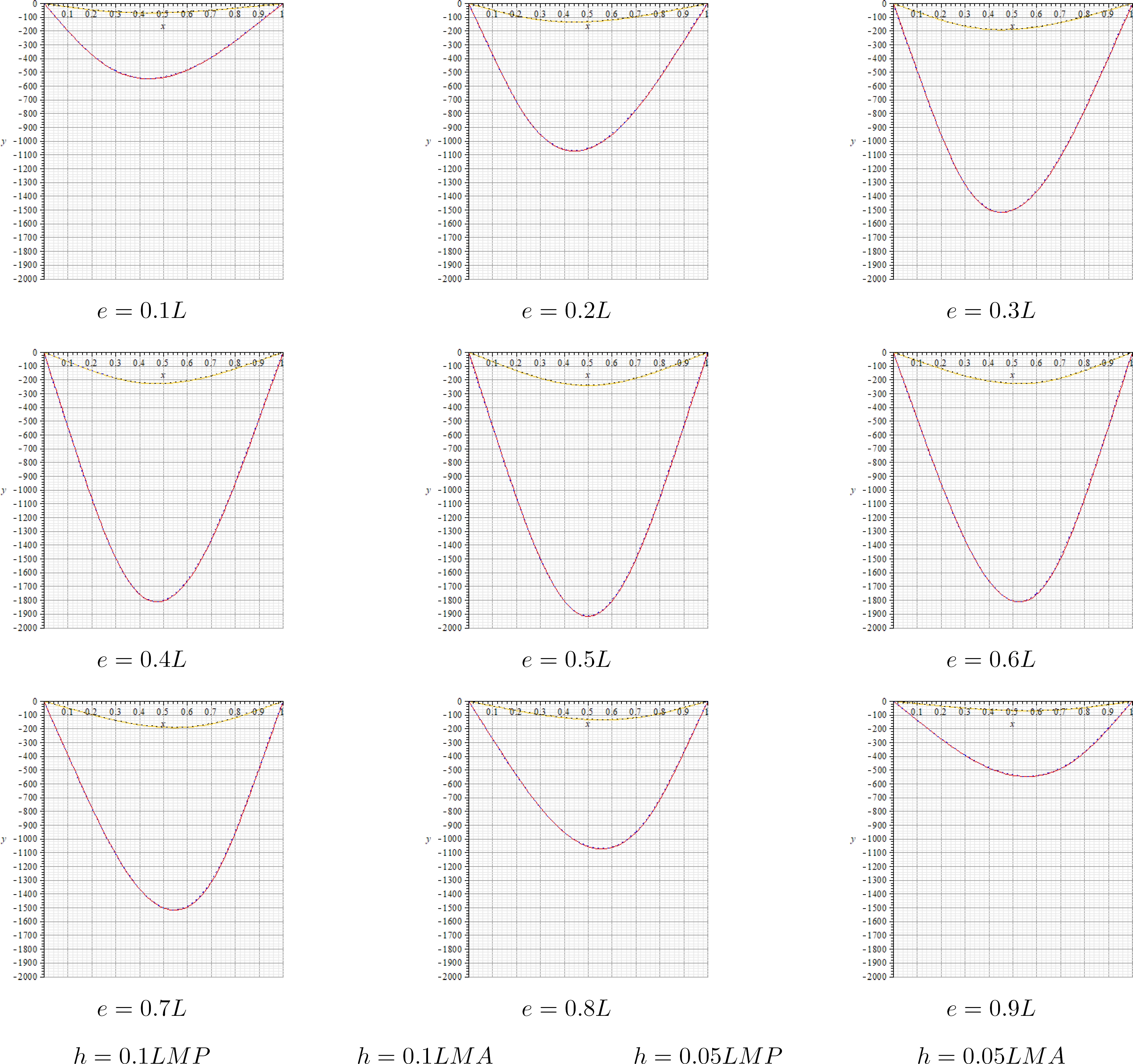
La Figura 3 muestra la curva elástica para vigas rectangulares simplemente apoyadas con cartelas parabólicas bajo carga concentrada situada en cualquier parte de la viga para los dos modelos (MP y MA).
La Figura 4 muestra la curva elástica para vigas perfectamente fijadas en sus extremos con cartelas parabólicas bajo carga concentrada situada en cualquier parte de la viga para los dos modelos (MP y MA).
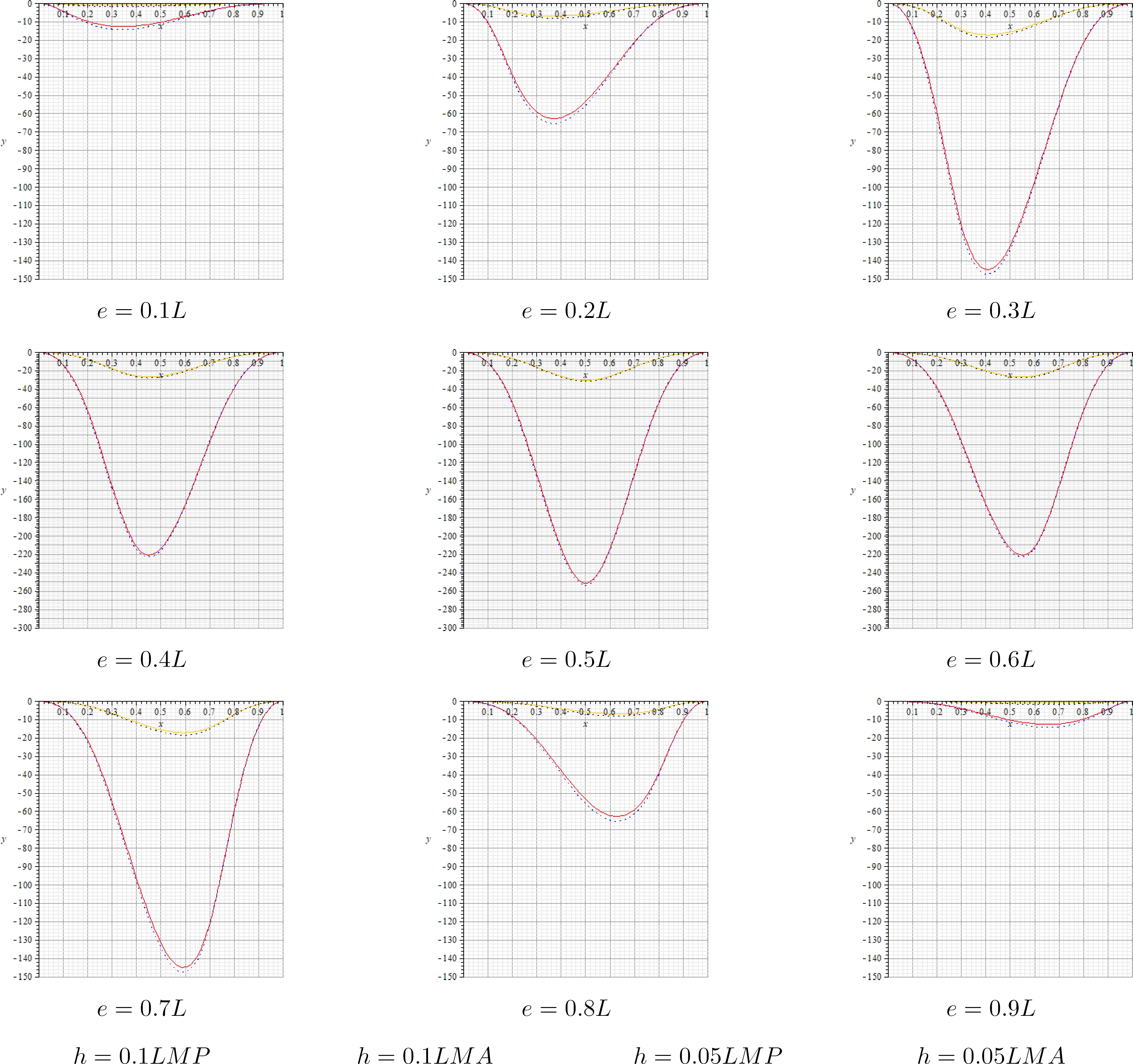
La Figura 5 muestra la curva elástica para vigas usando los mismos momentos y reacciones en sus extremos del modelo propuesto con cartelas parabólicas bajo carga concentrada situada en cualquier parte de la viga para los dos modelos (MP y MA).
4. Resultados
Los valores de la curva elástica (deflexiones) para la viga simplemente apoyada es mayor para el modelo propuesto con respecto al modelo actual para
Para la viga perfectamente fijada en sus extremos es mayor para el modelo actual con respecto al modelo propuesto para
Para la viga usando los momentos del modelo propuesto para los dos modelos es mayor para el modelo propuesto con respecto al modelo actual para
La Tabla 2 muestra la comparación de los dos modelos para obtener los factores para las rotaciones en los apoyos y los desplazamientos máximos para una viga simplemente apoyada.
Tabla 2 Deflexiones en vigas simplemente apoyadas
| e |
Factores de las rotaciones en el apoyo A y en el apoyo B |
Factores del desplazamiento máximo y su ubicación a partir del apoyo A |
||||||||||
| MP | MA | MP/MA | MP | MA | MP/MA | MP | MA | MP/MA | MP | MA | MP/MA | |
| 0.1L | 256.5180 | 252.3370 | 1.0166 | -174.3076 | -172.9501 | 1.0078 | 0.4398 | 0.4397 | 1.0002 | -68.3887 | -68.2495 | 1.0020 |
| 0.2L | 475.7573 | 467.5538 | 1.0175 | -344.4126 | -341.0962 | 1.0097 | 0.4429 | 0.4432 | 0.9993 | -134.4296 | -133.8157 | 1.0046 |
| 0.3L | 623.7549 | 614.4166 | 1.0152 | -496.1313 | -491.1697 | 1.0101 | 0.4532 | 0.4535 | 0.9993 | -190.3910 | -189.4294 | 1.0051 |
| 0.4L | 687.8740 | 679.6049 | 1.0122 | -612.2122 | -605.9814 | 1.0103 | 0.4724 | 0.4725 | 0.9998 | -227.2434 | -226.3062 | 1.0041 |
| 0.5L | 679.9931 | 672.7931 | 1.0107 | -679.9931 | -672.7931 | 1.0107 | 0.5000 | 0.5000 | 1.0000 | -240.2943 | -239.3673 | 1.0039 |
| 0.6L | 612.2122 | 605.9814 | 1.0103 | -687.8740 | -679.6049 | 1.0122 | 0.5276 | 0.5275 | 1.0002 | -227.2434 | -226.3062 | 1.0041 |
| 0.7L | 496.1313 | 491.1697 | 1.0101 | -623.7549 | -614.4166 | 1.0152 | 0.5468 | 0.5465 | 1.0005 | -190.3910 | -189.4294 | 1.0051 |
| 0.8L | 344.4126 | 341.0962 | 1.0097 | -475.7573 | -467.5538 | 1.0175 | 0.5571 | 0.5568 | 1.0005 | -134.4296 | -133.8157 | 1.0046 |
| 0.9L | 174.3076 | 172.9501 | 1.0078 | -256.5180 | -252.3370 | 1.0166 | 0.5602 | 0.5603 | 0.9998 | -68.3887 | -68.2495 | 1.0020 |
| 0.1L | 2027.0581 | 2018.6962 | 1.0041 | -1386.3156 | -1383.6005 | 1.0020 | 0.4397 | 0.4397 | 1.0000 | -546.3744 | -545.9960 | 1.0007 |
| 0.2L | 3756.8373 | 3740.4302 | 1.0044 | -2735.4021 | -2728.7693 | 1.0024 | 0.4432 | 0.4432 | 1.0000 | -1071.7534 | -1070.5257 | 1.0011 |
| 0.3L | 4934.0093 | 4915.3326 | 1.0038 | -3939.1808 | -3929.3574 | 1.0025 | 0.4535 | 0.4535 | 1.0000 | -1517.3580 | -1515.4349 | 1.0013 |
| 0.4L | 5453.3772 | 5436.8388 | 1.0030 | -4860.4556 | -4847.8512 | 1.0026 | 0.4725 | 0.4725 | 1.0000 | -1812.3238 | -1810.4492 | 1.0010 |
| 0.5L | 5396.7450 | 5382.3450 | 1.0027 | -5396.7450 | -5382.3450 | 1.0027 | 0.5000 | 0.5000 | 1.0000 | -1916.7922 | -1914.9380 | 1.0010 |
| 0.6L | 4860.4556 | 4847.8512 | 1.0026 | -5453.3772 | -5436.8388 | 1.0030 | 0.5275 | 0.5275 | 1.0000 | -1812.3238 | 1810.4492 | 1.0010 |
| 0.7L | 3939.1808 | 3929.3574 | 1.0025 | -4934.0093 | -4915.3326 | 1.0038 | 0.5465 | 0.5465 | 1.0000 | -1517.3580 | -1515.4349 | 1.0013 |
| 0.8L | 2735.4021 | 2728.7693 | 1.0024 | -3756.8373 | -3740.4302 | 1.0044 | 0.5568 | 0.5568 | 1.0000 | -1071.7534 | -1070.5257 | 1.0011 |
| 0.9L | 1386.3156 | 1383.6005 | 1.0020 | -2027.0581 | -2018.6962 | 1.0041 | 0.5603 | 0.5603 | 1.0000 | -546.2744 | -545.9960 | 1.0007 |
donde:
Estas comparaciones se realizan para
Las rotaciones y desplazamientos son mayores en el modelo propuesto con respecto al modelo actual.
Las rotaciones mayores aparecen cuando la carga
La diferencia mayor de las rotaciones para los dos modelos aparecen en
Los desplazamientos máximos aparecen cuando la carga
La diferencia mayor de los desplazamientos máximos para los dos modelos aparecen en
La Tabla 3 muestra la comparación de los dos modelos para obtener los factores para las rotaciones en los apoyos y los desplazamientos máximos para una viga empotrada en ambos extremos. Estas comparaciones se realizan para
Los momentos
Los momentos
Las reacciones
Los desplazamientos máximos en el modelo actual son mayores con respecto al modelo propuesto.
Los desplazamientos máximos aparecen cuando la carga
La mayor diferencia de los desplazamientos máximos entre los dos modelos aparece en
Tabla 3 Deflexiones en vigas perfectamente fijadas en sus extremos
| e |
Factores para momentos y reacciones en el apoyo A |
Factores del desplazamiento máximo y su ubicación a partir del apoyo A |
||||||||||
| MP | MA | MP/MA | MP | MA | MP/MA | MP | MA | MP/MA | MP | MA | MP/MA | |
| 0.1L | 0.0966 | 0.0932 | 1.0365 | 0.9943 | 0.9889 | 1.0055 | 0.3383 | 0.3452 | 0.9800 | -0.9263 | -1.7891 | 0.5177 |
| 0.2L | 0.1694 | 0.1635 | 1.0361 | 0.9507 | 0.9416 | 1.0097 | 0.3687 | 0.3714 | 0.9927 | -6.8415 | -8.1793 | 0.8364 |
| 0.3L | 0.2016 | 0.1958 | 1.0296 | 0.8463 | 0.8380 | 1.0099 | 0.4071 | 0.4079 | 0.9980 | -17.0884 | -18.4643 | 0.9255 |
| 0.4L | 0.1925 | 0.1886 | 1.0207 | 0.6869 | 0.6825 | 1.0064 | 0.4507 | 0.4507 | 1.0000 | -26.5992 | -27.9204 | 0.9527 |
| 0.5L | 0.1560 | 0.1543 | 1.0110 | 0.5000 | 0.5000 | 1.0000 | 0.5000 | 0.5000 | 1.0000 | -30.4482 | -31.7431 | 0.9592 |
| 0.6L | 0.1056 | 0.1062 | 0.9944 | 0.3131 | 0.3175 | 0.9861 | 0.5493 | 0.5493 | 1.0000 | -26.5992 | -27.9204 | 0.9527 |
| 0.7L | 0.0553 | 0.0578 | 0.9567 | 0.1537 | 0.1620 | 0.9488 | 0.5929 | 0.5921 | 1.0014 | -17.0884 | -18.4643 | 0.9255 |
| 0.8L | 0.0187 | 0.0219 | 0.8539 | 0.0493 | 0.0584 | 0.8442 | 0.6313 | 0.6286 | 1.0043 | -6.8415 | -8.1793 | 0.8364 |
| 0.9L | 0.0022 | 0.0043 | 0.5116 | 0.0057 | 0.0111 | 0.5135 | 0.6617 | 0.6548 | 1.0105 | -0.9263 | -1.7191 | 0.5177 |
| 0.1L | 0.0940 | 0.0932 | 1.0086 | 0.9902 | 0.9889 | 1.0013 | 0.3441 | 0.3452 | 0.9968 | -12.5921 | -14.3128 | 0.8798 |
| 0.2L | 0.1650 | 0.1635 | 1.0092 | 0.9439 | 0.9416 | 1.0024 | 0.3708 | 0.3714 | 0.9984 | -62.7547 | -65.4342 | 0.9591 |
| 0.3L | 0.1972 | 0.1958 | 1.0072 | 0.8401 | 0.8380 | 1.0025 | 0.4077 | 0.4079 | 0.9995 | -144.9686 | -147.7146 | 0.9814 |
| 0.4L | 0.1896 | 0.1886 | 1.0053 | 0.6836 | 0.6825 | 1.0016 | 0.4507 | 0.4507 | 1.0000 | -220.7226 | -223.3631 | 0.9882 |
| 0.5L | 0.1547 | 0.1543 | 1.0026 | 0.5000 | 0.5000 | 1.0000 | 0.5000 | 0.5000 | 1.0000 | -251.3548 | -253.9444 | 0.9898 |
| 0.6L | 0.1061 | 0.1062 | 0.9991 | 0.3164 | 0.3175 | 0.9965 | 0.5493 | 0.5493 | 1.0000 | -220.7226 | -223.3631 | 0.9882 |
| 0.7L | 0.0572 | 0.0578 | 0.9896 | 0.1599 | 0.1620 | 0.9870 | 0.5923 | 0.5921 | 1.0003 | -144.9686 | -147.7146 | 0.9814 |
| 0.8L | 0.0211 | 0.0219 | 0.9635 | 0.0561 | 0.0584 | 0.9606 | 0.6292 | 0.6286 | 1.0009 | -62.7547 | -65.4342 | 0.9591 |
| 0.9L | 0.0038 | 0.0043 | 0.8837 | 0.0098 | 0.0111 | 0.8829 | 0.6559 | 0.6548 | 1.0017 | -12.5921 | -14.3128 | 0.8798 |
dónde:
La Tabla 4 muestra la comparación de los dos modelos para obtener los factores para las rotaciones en los apoyos y los desplazamientos máximos para una viga usando los momentos del modelo propuesto para los dos modelos. Estas comparaciones se realizan para
Las rotaciones en el modelo propuesto son cero, porque los momentos son para vigas perfectamente fijadas en sus extremos.
Las rotaciones máximas aparecen en
Los desplazamientos máximos en el modelo propuesto son mayores con respecto al modelo actual.
Los desplazamientos máximos aparecen cuando la carga
La mayor diferencia de los desplazamientos máximos entre los dos modelos aparece en
Tabla 4 Deflexiones en vigas usando los momentos del modelo propuesto para los dos modelos
| e |
Factores de las rotaciones en el apoyo A y en el apoyo B |
Factores del desplazamiento máximo y su ubicación a partir del apoyo A |
||||||||
| MP | MA | MP | MA | MP | MA | MP/MA | MP | MA | MP/MA | |
| 0.1L | 0 | -5.1895 | 0 | 0.3489 | 0.3383 | 0.3535 | 0.9570 | -0.9263 | -0.7409 | 1.2502 |
| 0.2L | 0 | -9.8149 | 0 | 1.7051 | 0.3687 | 0.3754 | 0.9822 | -6.8415 | -6.1251 | 1.1170 |
| 0.3L | 0 | -10.9028 | 0 | 3.4972 | 0.4071 | 0.4101 | 0.9927 | -17.0884 | -16.0440 | 1.0651 |
| 0.4L | 0 | -9.1986 | 0 | 5.2014 | 0.4507 | 0.4516 | 0.9980 | -26.5992 | -25.6383 | 1.0375 |
| 0.5L | 0 | -7.2000 | 0 | 7.2000 | 0.5000 | 0.5000 | 1.0000 | -30.4482 | -29.5211 | 1.0314 |
| 0.6L | 0 | -5.2014 | 0 | 9.1986 | 0.5493 | 0.5484 | 1.0016 | -26.5992 | -25.6383 | 1.0375 |
| 0.7L | 0 | -3.4972 | 0 | 10.9028 | 0.5929 | 0.5899 | 1.0051 | -17.0884 | -16.0440 | 1.0651 |
| 0.8L | 0 | -1.7051 | 0 | 9.8149 | 0.6313 | 0.6246 | 1.0107 | -6.8415 | -6.1251 | 1.1170 |
| 0.9L | 0 | -0.3489 | 0 | 5.1895 | 0.6617 | 0.6465 | 1.0235 | -0.9263 | -0.7409 | 1.2502 |
| 0.1L | 0 | -10.2916 | 0 | 0.7854 | 0.3441 | 0.3461 | 0.9942 | -12.5921 | -12.2257 | 1.0300 |
| 0.2L | 0 | -19.4833 | 0 | 3.5567 | 0.3708 | 0.3722 | 0.9962 | -62.7547 | -61.3273 | 1.0233 |
| 0.3L | 0 | -21.6718 | 0 | 7.1282 | 0.4077 | 0.4084 | 0.9983 | -144.9686 | -142.8824 | 1.0146 |
| 0.4L | 0 | -18.3250 | 0 | 10.4750 | 0.4507 | 0.4509 | 0.9996 | -220.7226 | -218.8014 | 1.0088 |
| 0.5L | 0 | -14.4000 | 0 | 14.4000 | 0.5000 | 0.5000 | 1.0000 | -251.3548 | -249.5006 | 1.0074 |
| 0.6L | 0 | -10.4750 | 0 | 18.3250 | 0.5493 | 0.5491 | 1.0004 | -220.7226 | -218.8014 | 1.0088 |
| 0.7L | 0 | -7.1282 | 0 | 21.6718 | 0.5923 | 0.5916 | 1.0012 | -144.9686 | -142.8824 | 1.0146 |
| 0.8L | 0 | -3,5567 | 0 | 19.4833 | 0.6292 | 0.6278 | 1.0022 | -62.7547 | -62.3273 | 1.0233 |
| 0.9L | 0 | -0.7854 | 0 | 10.2916 | 0.6559 | 0.6539 | 1.0031 | -12.5921 | -12.2257 | 1.0300 |
5. Conclusiones
El modelo presentado en este documento para una viga de sección transversal rectangular con cartelas parabólicas bajo una carga concentrada localizada en cualquier parte de la viga y momentos en los extremos para obtener las rotaciones, los desplazamientos y la curva elástica, considerando las deformaciones por flexión y cortante (teoría de Timoshenko) ha sido desarrollado para el caso general. Las principales conclusiones son:
-
En el modelo actual la relación “
El modelo propuesto es mayor con respecto al modelo actual para las rotaciones en los apoyos y los desplazamientos máximos, cuando se presentan los mismos momentos en los extremos.
El modelo propuesto supera al actual en el intervalo de
El modelo propuesto es menor con respecto al modelo actual para los desplazamientos máximos, cuando la viga está perfectamente fijada en sus extremos.
Los desplazamientos máximos por el modelo propuesto que considera las deformaciones por flexión y cortante son mayores para vigas con los mismos momentos en los extremos, y son menores para vigas perfectamente fijadas en sus extremos respecto al modelo actual que considera las deformaciones por flexión.
Por lo tanto, las deflexiones máximas que actúan sobre las vigas del modelo propuesto en este trabajo deben compararse con las deflexiones máximas permitidas por los códigos de construcción, porque en algunas condiciones podría ser que no cumpla con los estándares establecidos por los códigos de construcción.
Entonces, el modelo propuesto es más apropiado y seguro con respecto al modelo actual para el análisis estructural, debido a que los esfuerzos cortantes y los momentos flectores están presentes en cualquier tipo de estructura y aparecen deformaciones por flexión y cortante. Las sugerencias para investigaciones futuras pueden ser:

