












 (pdf)
(pdf)




 SciELO
SciELO  SciELO
SciELO 
 Permalink
Permalink1. Introducción
La implementación de robots colaborativos en procesos de laboratorios ha cobrado gran relevancia debido a su capacidad para trabajar de manera segura junto a los seres humanos, optimizando así la eficiencia y precisión en tareas repetitivas y delicadas. Este artículo se enfoca en la primera fase de integración del robot colaborativo ABB YuMi IRB 14000 en un entorno de laboratorio especializado en procesos poliméricos. Se describen las herramientas utilizadas, los procedimientos de calibración y la programación necesaria para asegurar una operación segura y precisa. Además, se presentan los resultados obtenidos y se discuten las mejoras propuestas para futuras implementaciones.
2. Robot colaborativo YuMi IRB 14000
El ABB YuMi IRB 14000 es un robot colaborativo de dos brazos, diseñado específicamente para trabajar de manera segura junto a personas en diferentes entornos. Cada brazo del YuMi tiene 7 grados de libertad, permitiéndole realizar movimientos complejos con alta precisión. Sus brazos están acolchados y su diseño es compacto y ligero, lo que maximiza la seguridad para el personal que se encuentra en contacto directo con el robot [1].
El YuMi incorpora características como la predicción de colisiones y parada instantánea al detectar alguna colisión. Este robot es ideal para el manejo de piezas pequeñas, manejo de material delicado, y tareas de medición e inspección. El ABB YuMi IRB 14000, con sus características avanzadas de seguridad y precisión, se adapta perfectamente a los entornos de laboratorio donde se manejan materiales delicados como los polímeros. En esta sección se detallan las herramientas seleccionadas y su integración en el laboratorio [2].
2.1 Selección de herramientas para el robot
Gripper: El gripper será utilizado para agarrar y manipular objetos de diversas formas y tamaños. Esta herramienta es esencial para la manipulación segura y precisa del material de laboratorio [3].
Cámara: La cámara permitirá la identificación de objetos, mediante visión artificial. Esta capacidad de reconocimiento visual es fundamental para reconocer equipo y sustancias, asimismo, asegurar la correcta manipulación del equipo.
Tapete Antirreflejante: El tapete antirreflejante mejora la capacidad de la cámara para reconocer objetos, eliminando reflejos no deseados que puedan interferir con el sistema de visión artificial.



2.2. Identificación de material de laboratorio a utilizar
Para el manejo seguro y eficiente de sustancias poliméricas, se empleará una variedad de materiales de laboratorio que incluyen probetas, frascos y contenedores específicos para el almacenamiento y manipulación de polímeros. Para garantizar la integridad del proceso es requerido que cada herramienta y contenedor haya sido sometido a pruebas de resistencia con la herramienta a utilizar.
3. Preparación del robot, herramientas y espacio de trabajo
Iniciaremos con la calibración del robot y sus herramientas en el software RobotStudio. Primero, importamos el modelo del robot y configuramos el Smart Gripper, seguido por la calibración de la cámara y del espacio de trabajo. Estos pasos son cruciales para asegurar una operación segura y eficiente [4].
3.1. Calibraciones
Para poder programar el robot de forma correcta es necesario realizar la calibración de cada una de las herramientas a utilizar ya que de lo contrario podría provocar colisiones con el entorno de trabajo o dañar al personal de laboratorio.
3.1.1. Calibración del robot
Posicionamiento inicial:
Colocar ambos brazos del YuMi en una posición de referencia. Esta posición suele ser una configuración predefinida que alinea los brazos en una postura neutral.
Ejecutar calibración:
Ejecutar el procedimiento de calibración, que generalmente incluye actualizar el “Cuentarrevoluciones”.
Validación y ajuste:
Validar que las posiciones alcanzadas por el brazo coincidan con las posiciones predeterminadas. Si es necesario, realizar ajustes finos hasta que el brazo esté correctamente calibrado.
Guardar configuración:
Una vez calibrados ambos brazos, guardar la configuración en el sistema del robot para asegurar que estas calibraciones se mantengan durante las operaciones.

3.1.2. Calibración de la cámara
Es importante tener un posicionamiento inicial de la cámara para adquirir la imagen.
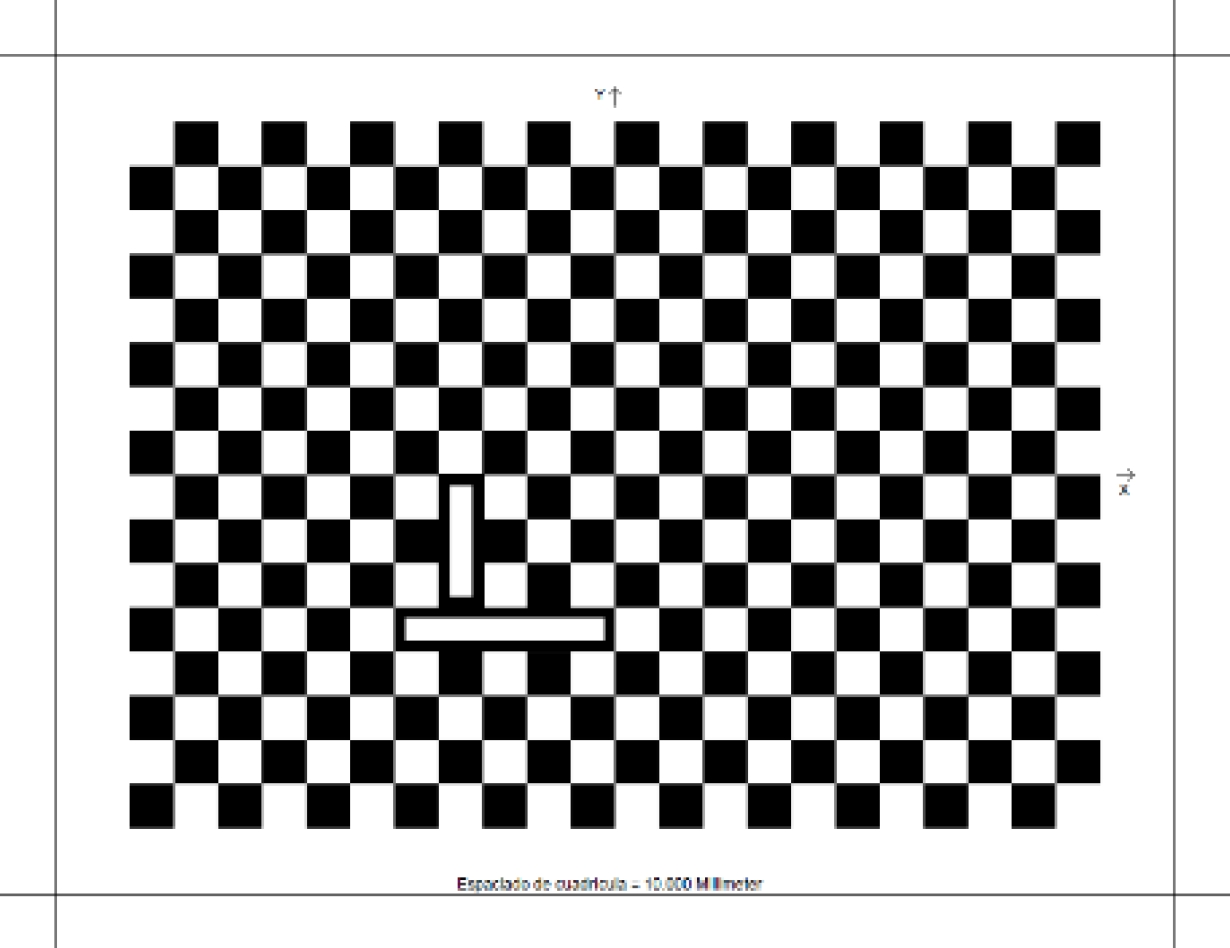
Se añade una plantilla de calibración en nuestro espacio de trabajo.
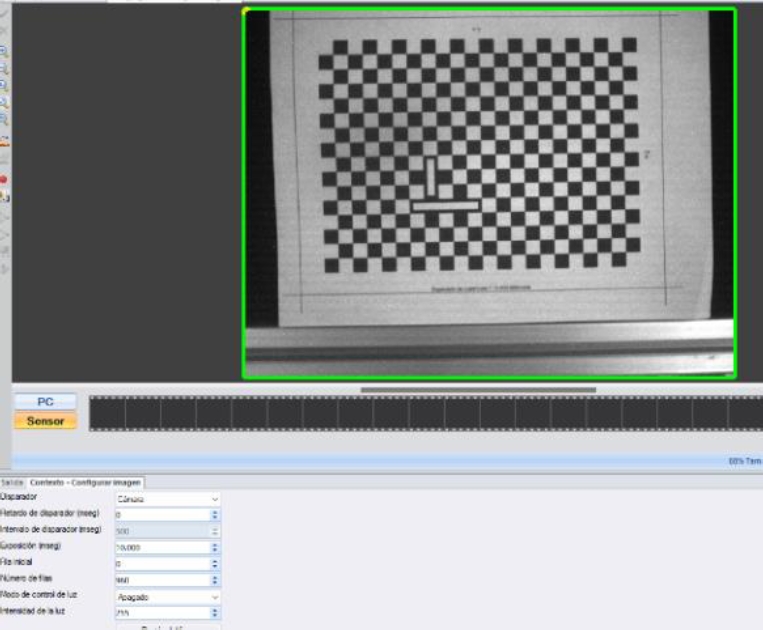
Realizamos la adquisición de la imagen y procedemos a calibrar los parámetros dentro de la interfaz para poder ajustar y obtener una imagen adecuada.
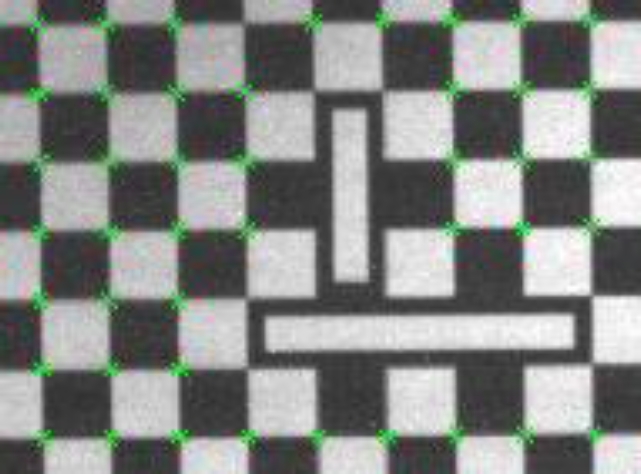
Adquisición de nueva imagen y realizar calibración de la cámara como nos indica el fabricante.
Obtenemos los resultados y la fiabilidad del espacio de trabajo.
Con esto finaliza la calibración de la cámara respecto al espacio de trabajo.
3.1.3. Calibración en el espacio de trabajo
Desde el software creamos un nuevo TCP que este será la punta del gripper, ya que lo utilizaremos como palpador o calibrador de punta, lo establecemos a la distancia en Z de 135.00mm.
Sincronizamos la estación de trabajo con RAPID para obtener los valores de las herramientas que utilizaremos y posteriormente darlos de alta en el flexpendant en el archivo de “Calib Data”.
Dentro de la pestaña de “Jogging”, encontraremos la herramienta cargada, realizamos la selección para usarlo como apoyo en la calibración. Creamos un nuevo espacio de trabajo en el controlador, este será los limites donde el robot buscará el objeto a detectar.
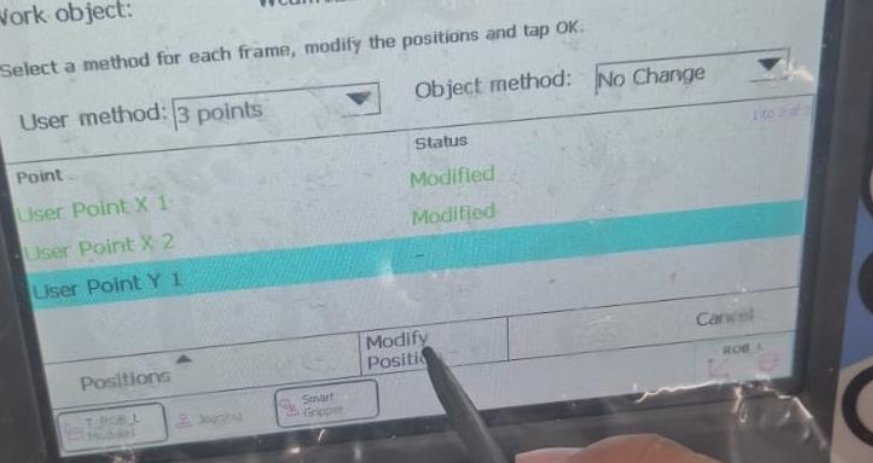
Declaramos nuestro espacio de trabajo para que se calcule por medio de 3 puntos, Centro, X e Y. Se modifica las posiciones respectivas en el controlador y aceptamos, posteriormente esperamos a que termine de calcular nuestro espacio de trabajo.
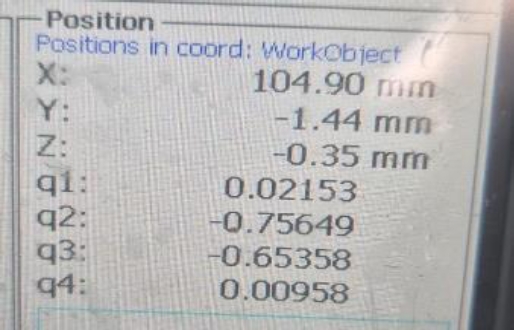
Para corroborar nuestra operación podemos mover el brazo del robot de forma manual y observar cómo cambian los valores de X, Y y Z dependiendo la posición en que se encuentre nuestra herramienta.
Regresamos a la posición de Home y retiramos la plantilla de calibración.
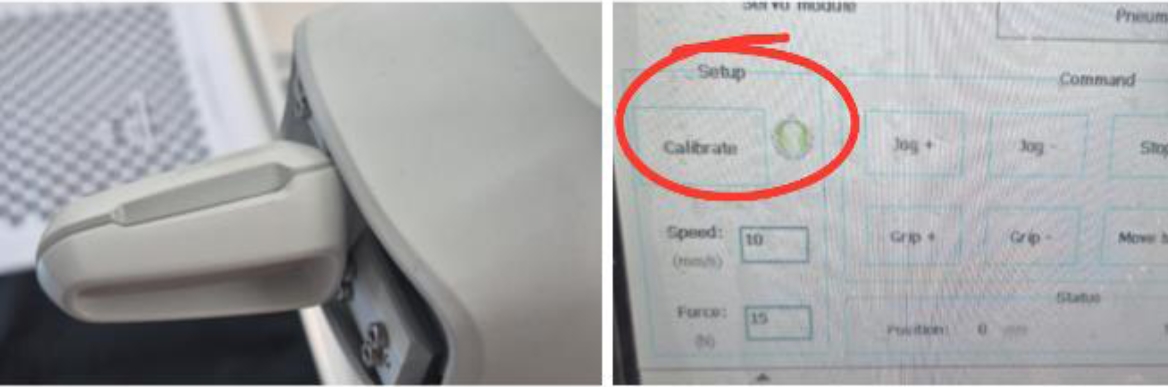
3.1.4. Calibración servomotores
Para la calibración del gripper nos vamos a la pestaña de Smart gripper y configuramos el gripper en posición mínima y realizamos la calibración.
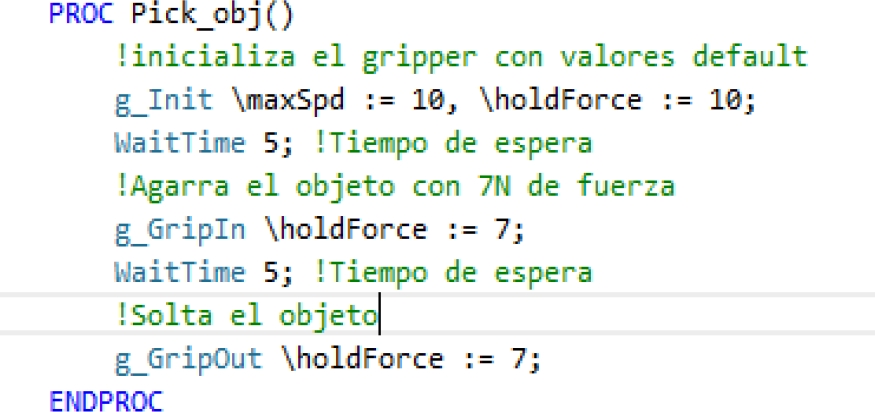
Se realizó un programa de prueba para verificar que funciona correctamente para el agarre de un objeto, para esta prueba se utilizara un frasco de vidrio, inicializaremos el gripper con una fuerza de agarre de 10N y a una velocidad de 10mm/s, posteriormente y le aplicaremos una fuerza de 7N para asegurar la integridad del recipiente.
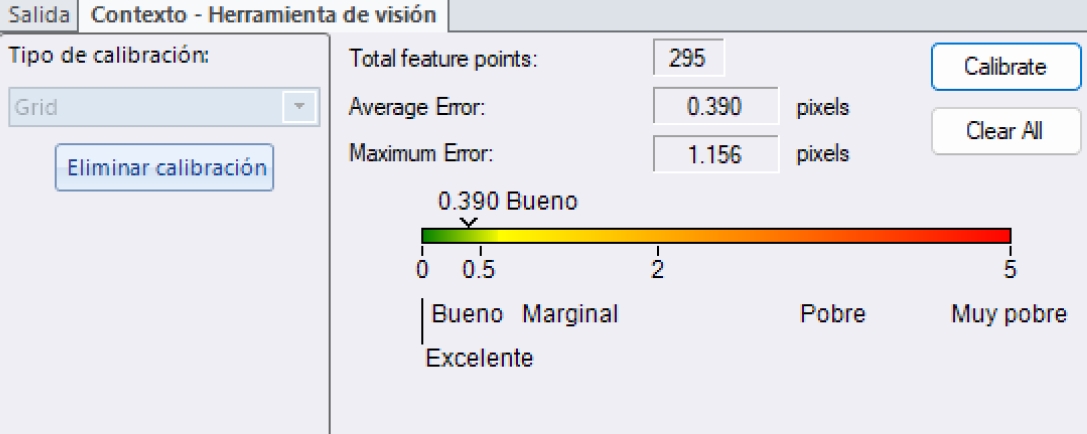
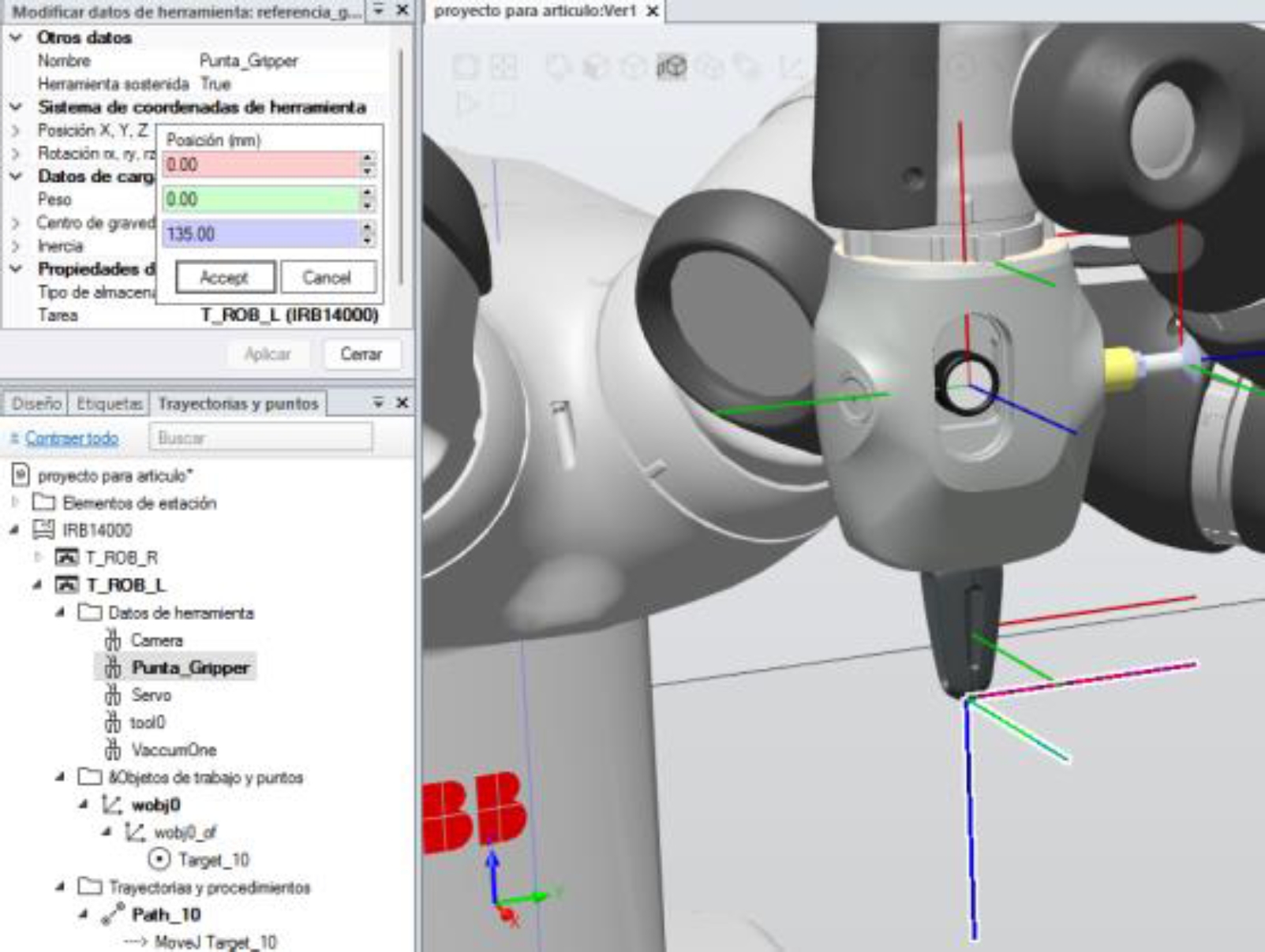

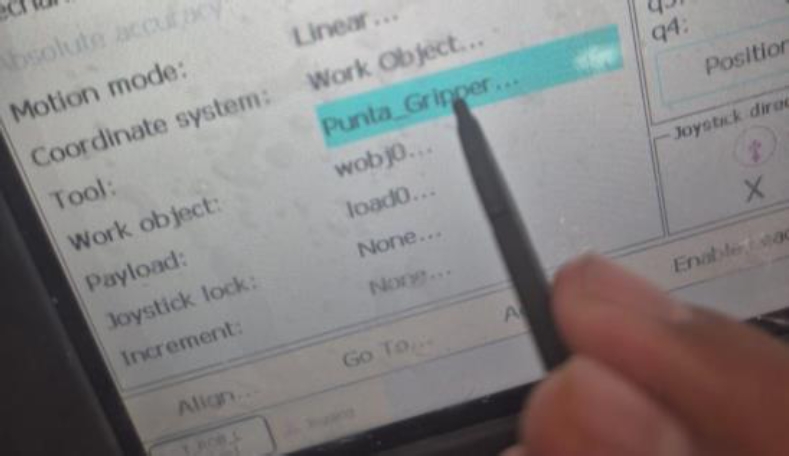
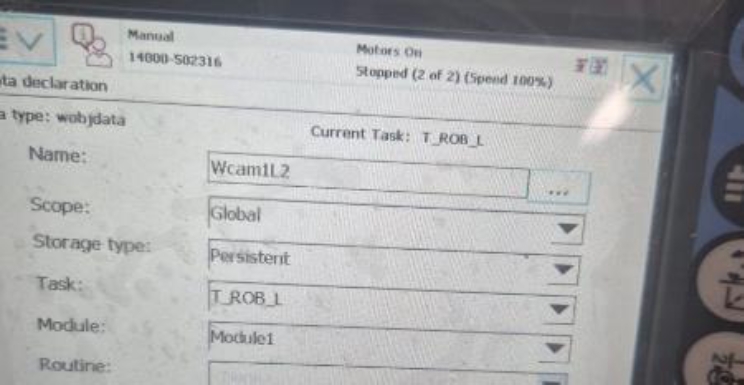

Fig. 13 Posicionamiento de la herramienta en las referencias del espacio de trabajo, centro, extremo en X y extremo en Y respectivamente
4. Programación del robot
Para la programación del robot ABB YuMi IRB 14000 se planea utilizar el software RobotStudio, donde se configurará la cámara y las herramientas necesarias para el manejo de objetos y la identificación visual en el entorno de trabajo. El proceso incluirá la definición de trayectorias precisas para evitar colisiones y asegurar la correcta manipulación de los objetos.
La configuración de la cámara permitirá la adquisición de imágenes y el reconocimiento de patrones para identificar correctamente los frascos de laboratorio que serán manipulados por el robot. Además, se programarán posiciones auxiliares para guiar al robot de manera segura hasta el punto de captura de imagen, asegurando así una operación eficiente y segura.
4.1. Posicionamiento del robot
Se busca llegar a un puto establecido por coordenadas para que capture la imagen de forma correcta. Así mismo se emplearán trayectorias auxiliares para que llegue a la posición deseada y evitar algún tipo de colisión con el entorno o con el mismo robot.
El punto de referencia que crearemos se encontrara en las coordenadas [400, 0, 400] justo en el centro de nuestro plano de trabajo.
Una vez llegada a la posición procedemos a realizar la captura de imagen para programar el reconocimiento de objetos.
4.2. Programación general de la cámara
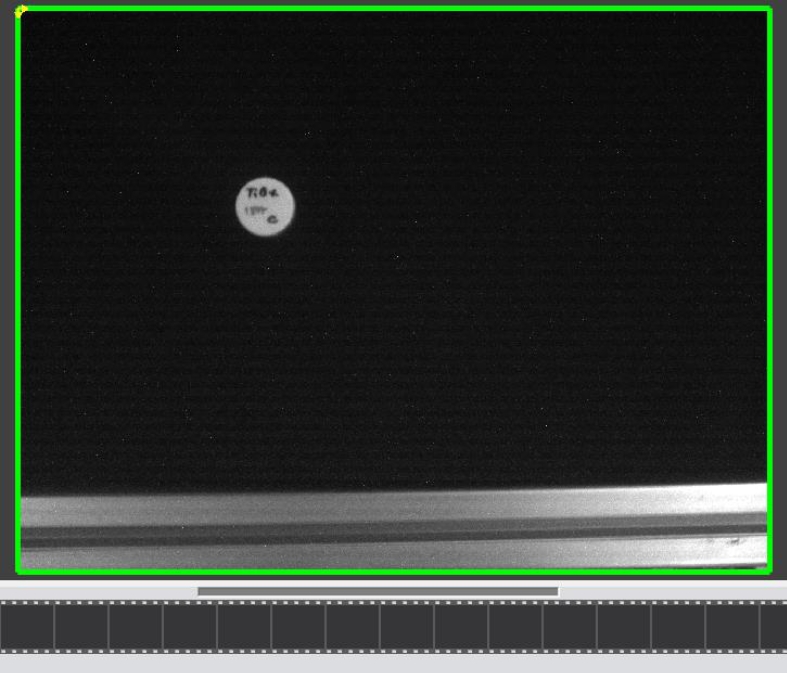
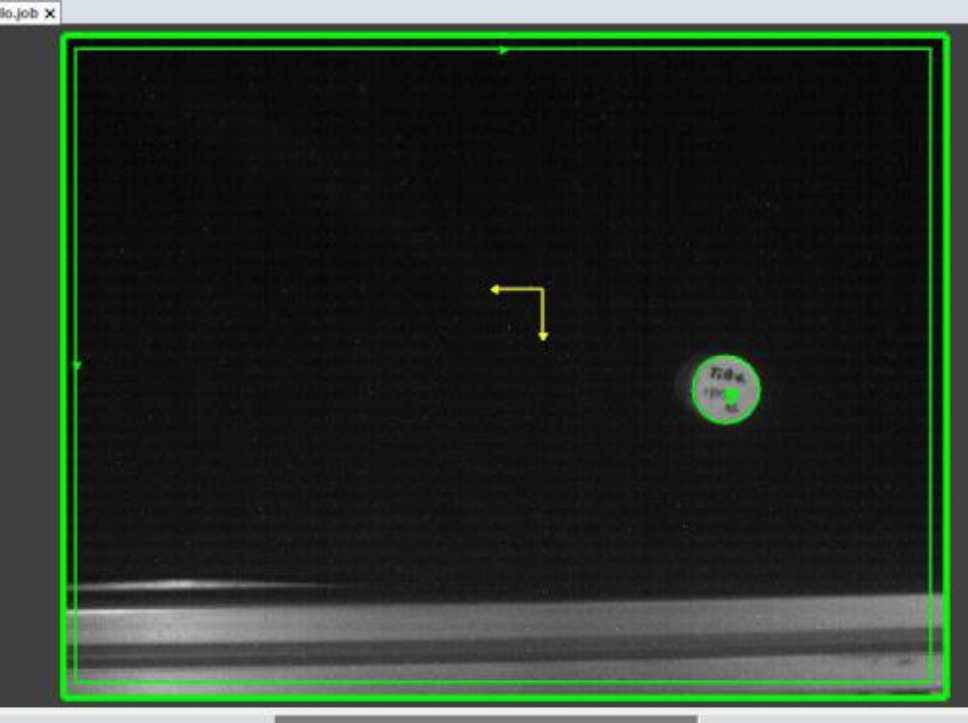
El objeto que identificará el robot es un pequeño frasco de laboratorio. Procedemos a adquirir la imagen de nuestro espacio de trabajo con el objeto a identificar en el campo de visión de la cámara. Con las opciones que nos muestra el software utilizamos la de identificación y patrón.
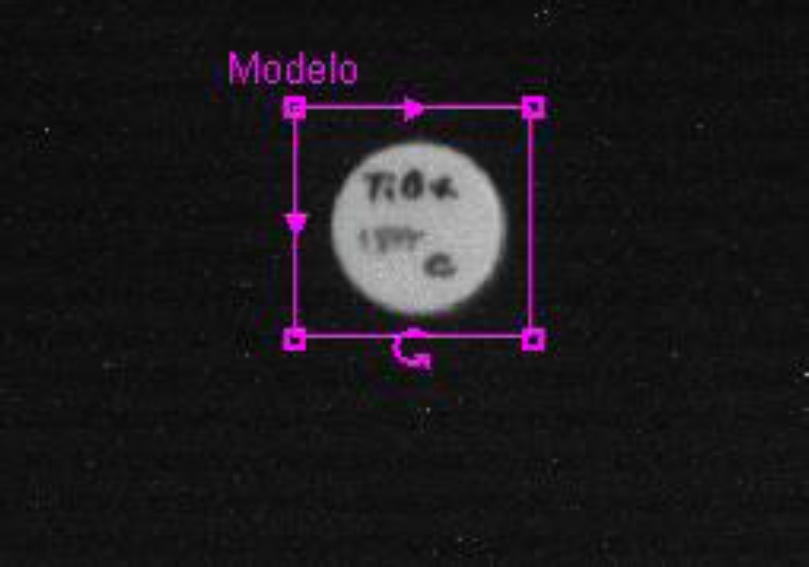
Incluimos dentro de la región de “modelo” nuestro modelo a identificar, en este caso la tapa del frasco. Aceptamos y tendríamos nuestra herramienta de identificación, la cual nos ayudaría a obtener el centro de nuestro objeto a detectar en coordenadas.
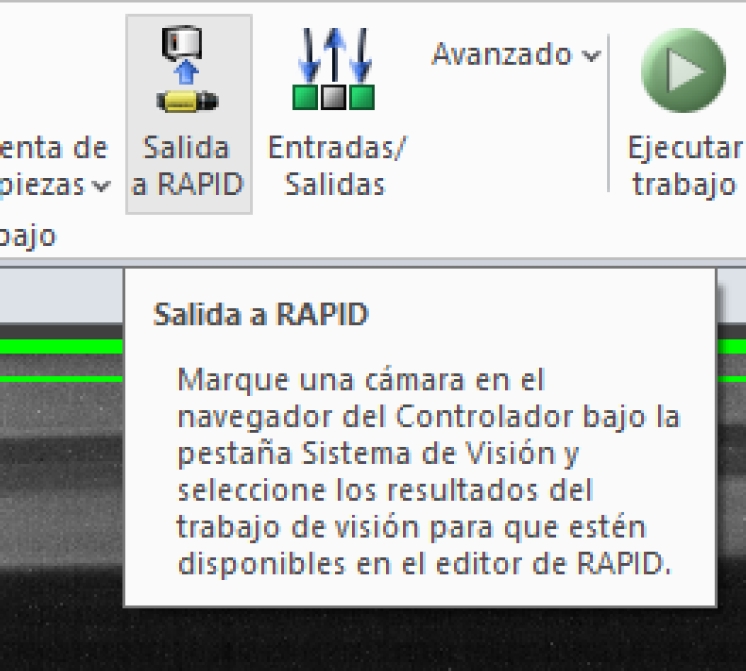
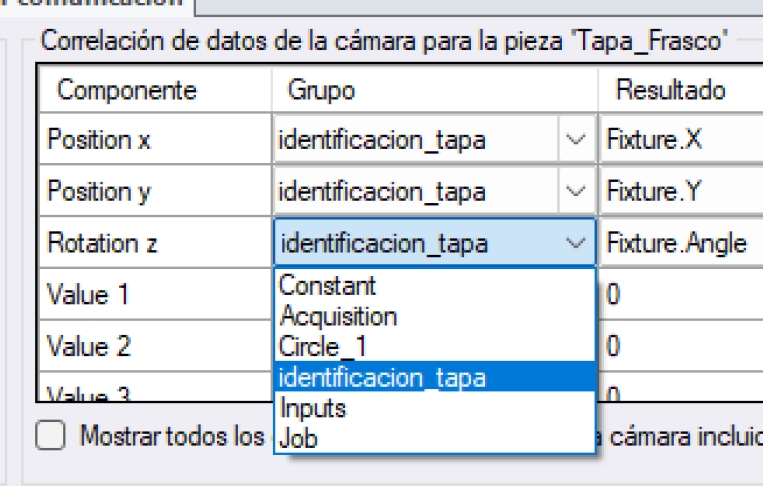
Por último, debemos de extraer esas coordenadas de la cámara y enviarlas al controlador para que el robot obtenga las coordenadas a dirigirse y poder llegar al objeto en cuestión.
Seleccionamos “salida a RAPID” y enviamos las coordenadas del objeto detectado que son X, Y y el ángulo de inclinación. Con esto terminamos la calibración de la cámara para la identificación de nuestro objeto.

4.3. Código de funcionamiento
¡Se inicia declarando las constantes que nos ayudaran a simplificar el código.
PERS wobjdata Wcam1L2:=[FALSE,TRUE,"",[[383.361,-12.2866,-0.704813],[.71137,0.0153852,0.0151982,0.702485]],[[4.05847,-3.98945,0],[.967522,0,0,0.252787]]];
!asignamos a una variable el nombre de nuestro trabajo de visión artificial
CONST string myjob := "calibracion_articulo.job";
VAR cameratarget mycameratarget;
!declaración de detección de objeto
CONST robtarget objeto_auxiliar_antes:=[[-5,-14.52,100.44],[.355457,-0.673058,-0.549159,0.345062],[-1,-1,2,5],[.013,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget objeto:=[[-28.29,-10.78,25.56],[.355467,-0.673066,-0.549144,0.345059],[-1,-1,2,5],[.013,9E+09,9E+09,9E+09,9E+09,9E+09]];
!Funcion auxiliar para posición de adquisición de imagen
PROC GoFotoL()
MoveJ [[125,210,230],[.0644092,0.843286,-0.105959,0.522965],[0,-1,1,4],[.536,9E+09,9E+09,9E+09,9E+ 09,9E+09]], v1000, z100, tool0;
MoveJ [[355.00,205,270],[.469667,-0.443146,0.480795,-0.593186],[-1,-1,2,4],[.664,9E+09,9E+09,9E+09,9E+ 09,9E+09]], v1000, z100, tool0;
MoveJ [[375,-7,290],[.0609033,0.78477,0.616734,0.00 809459],[-1,0,0,4],[.611,9E+09,9E+09,9E+09,9E +09,9E+09]], v1000, z100, Camera;
MoveJ [[400,0,400],[.0,0.707106781,0.7071067 81,0.0],[-1,0,0,4],[.611,9E+09,9E+09,9E+09,9E +09,9E+09]], v1000, z100, Camera;
ENDPROC
!Funcion de deteccion del objeto, establece la cámara en modo adecuado, carga el trabajo de visión, inicializa camra, y adquiere datos enviadas
PROC DetectedObject()
CamSetProgramMode cam_izq;
CamLoadJob cam_izq, myjob;
CamSetRunMode cam_izq;
WaitTime 7;
CamReqImage cam_izq;
CamGetResult cam_izq, mycameratarget;
Wcam1L2.oframe := mycameratarget.cframe;
ENDPROC
!Funcion de que nos ayuda a mover el gripper a las coordenadas del objeto a detectar, transformando las coordenadas de la cámara a las coordenadas del plano de trabajo.
PROC MoveToDetectedObject()
MoveJ objeto_auxiliar_antes, v100, fine, Servo \WObj:=Wcam1L2;
MoveJ objeto, v100, fine, Servo \WObj:=Wcam1L2;
Pick_obj;
MoveJ objeto_auxiliar_antes, v100, fine, Servo \WObj:=Wcam1L2;
ENDPROC
!Funciones auxiliares
!Posicion de Home
PROC GoHomeL()
MoveAbsJ [[0,-130,30,0,40,0],[135,E9,9E9,9E9,9E9,9E9]]\NoE Offs, v1000, fine, tool0;
ENDPROC
!agarrar objeto
PROC Pick_obj()
g_GripIn \holdForce := 7;
ENDPROC
!inicializar gripper y abrir
PROC open_gripp()
g_Init \maxSpd := 10, \holdForce := 10;
g_GripOut \holdForce := 7;
ENDPROC
!Código Main
PROC main()
GoHomeL;
open_gripp;
WaitTime 5;
GoFotoL;
DetectedObject;
MoveToDetectedObject;
!posicion a soltar el objeto
MoveJ [[400,0,400],[.0,0.707106781,0.707106781,0.0],[-1,0,0,4],[.611,9E+09,9E+09,9E+09,9E+0 9,9E+09]], v1000, z100, Camera;
WaitTime 5;
open_gripp;
WaitTime 5;
Waittime 20;
ENDPROC

4.4. Primer pick and place
Una vez terminado el código procedemos a ejecutarlo hasta la función DetectObject() ya que es necesario realizar el posicionamiento de agarre
Una vez el robot haya terminado esa función debemos moverlo de forma manual hasta la posición de agarre que deseemos.
Una vez realizado esto regresamos a home y procedemos a correr el programa completo.
5. Resultados obtenidos
En esta sección se presentan los resultados obtenidos durante la implementación del robot colaborativo ABB YuMi IRB 14000 en el laboratorio de procesos poliméricos.
5.1. Espacio de trabajo y calibración
Uno de los principales hallazgos fue la importancia de tener un espacio de trabajo con medidas específicas y bien calibrado. Durante los experimentos, se observó que la precisión del robot en la recolección de objetos podía verse afectada por variaciones de 2 a 6 mm si el espacio de trabajo y el palpador no estaban calibrados adecuadamente. Para abordar esta problemática, se propuso realizar las siguientes acciones:
– Establecer un espacio de trabajo específico con dimensiones precisas, garantizando que todos los elementos necesarios para las operaciones del robot estuvieran dentro de este espacio.
– Utilizar un palpador específico para la calibración, lo cual ayudará a minimizar las desviaciones y a asegurar una precisión consistente en las tareas del robot.

5.2. Impacto en la precisión
El análisis de los datos recolectados mostró que, sin un espacio de trabajo bien definido y un palpador específico, es muy complicado corregir las desviaciones de posicionamiento. La precisión del robot en la manipulación de objetos no alcanzó los estándares requeridos para las operaciones de laboratorio.
5.3. Ejemplos prácticos
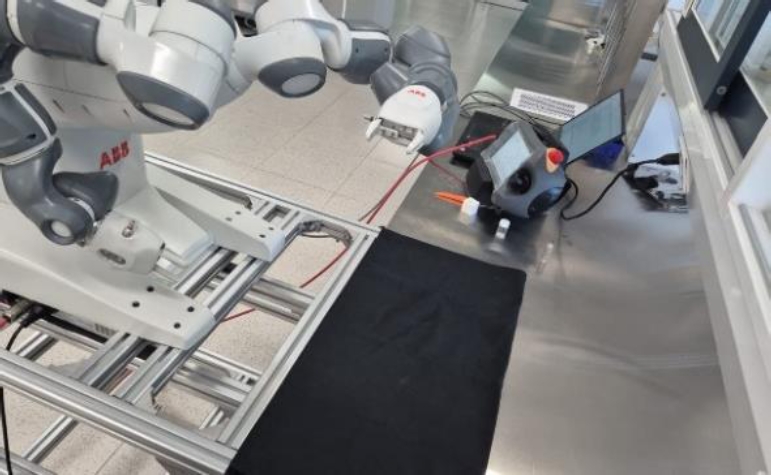
Se realizaron pruebas específicas para evaluar el impacto de la falta de calibración adecuada. En una de las pruebas, el robot debía recoger un frasco de vidrio ubicado en el espacio de trabajo.
Los resultados mostraron que, debido a las desviaciones de 2 a 6 mm, el robot no fallaba en recoger el frasco, sin embargo, existía la posibilidad de que aumentara el riesgo de daños o errores en el proceso. Enlace a video demostrativo aquífn

6. Implementación futura
En el futuro, se busca corregir estos errores de desviación con la recolección de objetos para poder expandir la implementación del robot YuMi en otras áreas de la investigación de polímeros. Esto incluye automatización de diversas tareas dentro del laboratorio, tales como la manipulación de muestras, la preparación de ensayos y la realización de pruebas de materiales.
La integración se extenderá a procesos repetitivos y precisos, como el reconocimiento de sustancias y la interacción con equipos de medición. Además, se espera la utilización de patrones y la lectura de códigos Data Matrix para garantizar una gestión óptima del inventario y la trazabilidad de los procesos.
Los futuros desarrollos también abordarán desafíos potenciales en la escalabilidad y seguridad del sistema, proponiendo soluciones innovadoras para mantener la integridad y eficiencia en el entorno de laboratorio.
7. Conclusiones
La implementación del robot colaborativo ABB YuMi IRB 14000 en el laboratorio de procesos poliméricos ha demostrado ser un avance significativo en la automatización de tareas delicadas y repetitivas. Las principales conclusiones derivadas de esta primera fase de implementación son las siguientes:
Importancia de la calibración:
La precisión en la manipulación de objetos depende críticamente de una calibración adecuada del espacio de trabajo y de las herramientas utilizadas. Pequeñas desviaciones en la calibración pueden afectar significativamente la eficacia del robot en tareas de recolección y manipulación.
Selección de herramientas:
La elección correcta de herramientas, como el gripper y la cámara, es fundamental para asegurar una operación eficiente y segura. Estas herramientas permiten al robot manejar objetos de diversas formas y tamaños, y realizar tareas de reconocimiento visual con alta precisión.
Procedimientos de programación:
La programación detallada del robot, incluyendo la definición de trayectorias y posiciones auxiliares, es esencial para evitar colisiones y asegurar la correcta manipulación de los objetos.
La configuración de la cámara para la adquisición y reconocimiento de imágenes también es crucial para el éxito de las tareas asignadas al robot.
Impacto en la investigación:
La integración del robot YuMi en el laboratorio abre nuevas oportunidades para automatizar procesos de investigación en polímeros, mejorando la eficiencia y reduciendo el riesgo de errores humanos. Además, la capacidad del robot para trabajar de manera segura junto a los investigadores permite una mayor colaboración y optimización de los recursos del laboratorio.
Mejoras futuras:
Para futuras fases de implementación, es necesario abordar las desviaciones de posicionamiento identificadas durante esta primera fase. La recolección de datos y la refinación continua de los procedimientos de calibración y programación contribuirán a mejorar la precisión y eficacia del robot en tareas más complejas.

