











 nova página do texto(beta)
nova página do texto(beta) Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
PermalinkIntroducción
La Osteogénesis Imperfecta (OI), también llamada como la enfermedad de los huesos de cristal tiene como causa un desorden genético hereditario, que afecta principalmente la producción de colágeno, lo que trae como consecuencia en huesos con una densidad ósea y resistencia mecánica por debajo de lo normal [1]. Su tratamiento suele necesitar de la intervención de un equipo multidisciplinario; debido a las variables clínicas que se presentan en la enfermedad; dentro de las áreas más comunes se encuentran la rehabilitación física, tratamiento dental, terapia farmacológica, ortopedia e intervención quirúrgica son las que destacan [2].
A lo largo de la historia, las fracturas en huesos largos se han tratado mediante el uso de la osteosíntesis, la cual consiste en fijar los segmentos de hueso con ayuda de elementos de sujeción, como lo son placas metálicas, dispositivos intramedulares (clavos, tornillos y alambres), agujas y pines, entre otros, dependiendo de la gravedad de la fractura. Estos métodos resultan poco eficientes para el tratamiento de la OI, debido al principio manejado para su fijación que consiste en la penetración del hueso en diferentes zonas para el ajuste del dispositivo utilizado [3].
Posteriormente, debido a los excelentes resultados obtenidos al tratar las fracturas mediante los dispositivos intramedulares, se pensó en aplicar el mismo método en pacientes afectados con OI. Sin embargo, rápidamente se identificó el problema de estos dispositivos al tratar esta enfermedad, el cual presentaba dificultad en el teléscopado del dispositivo, es decir, no crecía junto con el hueso, lo que llegaba a ocasionar un desplazamiento del clavo dentro del hueso obligando a realizar varias cirugías para el reacomodamiento de este [4]; ejemplo de lo anterior ocurre en 1959, cuando Solfield y Millar publican los resultados de la técnica quirúrgica que empleaban en el hospital Chicago-Shriners desde 1948 cuyo título es, Fragmentation, realignment and intramedullary rod fixation of deformities of the long bones in children, donde varios pacientes eran niños afectados con OI, y un elevado porcentaje de los infantes mostraban nuevas fracturas al ser tratados con clavos intramedulares [5].
Conociendo el problema se trataron las fracturas con clavos intramedulares elásticos, Elastic Stable Intramedullary Nail, ESIN por sus siglas en inglés. Sin embargo, un nuevo problema surgió en estos clavos al ser sobre pasados por el hueso debido al crecimiento del infante, por lo que para asegurar un buen funcionamiento se optó por fijar el dispositivo en las epífisis distal y proximal del hueso [6]. En los años 60’s se desarrollan los clavos telescópicos, los cuales al ser fijados en las epífisis redujeron dramáticamente el número de cirugías necesarias en un niño, no obstante, se seguían presentando complicaciones como el hecho que el crecimiento del niño sobrepasara el rango telescópico establecido para el clavo [7].
Inicialmente el dispositivo Bailey-Dubow™ fue el clavo telescópico utilizado para el tratamiento de la OI [5], documentando buenos porcentajes de éxito, este implante consiste en la inserción de sus dos componentes por cada una de las epífisis, es decir se realizan 2 perforaciones en el hueso. Posteriormente se desarrolló el dispositivo Fassier-Duval™, el cual incorpora 2 roscas en ambos extremos del implante lo que permite ser introducido por un solo orificio, reduciendo así el número de operaciones a realizar para su inserción y extracción [7]. En la actualidad los implantes más utilizados para el tratamiento de la rehabilitación de huesos largos en pacientes con OI son los dos clavos telescópicos antes mencionados, aunque dependiendo del tipo de OI también se pueden utilizar clavos intramedulares elásticos o de fijación.
En el presente trabajo se revisarán diferentes geometrías para el diseño de un clavo telescópico especializado en pacientes con OI tipo III, para reducir los problemas existentes y conseguir un mejor porcentaje de éxito en la rehabilitación de estos pacientes. Se llevaron a cabo análisis numéricos con base en la norma ASTM 1264 a los clavos telescópicos propuestos. Finalmente, se muestran comparaciones entre las geometrías propuestas que conllevan a prevenir migraciones en el tratamiento.
Metodología
La metodología aplicada en este trabajo se desarrolla sobre el rediseño de un dispositivo intramedular basado en las complicaciones que se encuentran documentadas dentro de la literatura acerca del dispositivo intramedular telescópico. El diseño de este dispositivo consiste en dos elementos cilíndricos, uno de ellos tubular, el cual se denomina implante hembra, y el segundo sólido, pero con un diámetro cercano al interno del implante hembra, llamado implante macho. Cada implante posee en un extremo una sección roscada, en el implante hembra de 1.65 cm y en el macho de entre 1.00 cm y 1.5 cm. La rosca que se emplea en el implante hembra es una rosca de perfil circular mientras que, en el implante macho el perfil es trapezoidal.
Basándose en las complicaciones encontradas dentro de la literatura, se proponen modificaciones en la geometría del implante macho con la finalidad de prevenir una rotación que desencadene en la pérdida de fijación del implante con la epífisis. Asimismo, se plantean modificaciones dentro de las roscas de los implantes, para lograr una mejor fijación entre implante-hueso y evitar la migración del dispositivo intramedular.
La metodología se desarrolla en este trabajo mediante la aplicación del método de elemento finito, en 15 diferentes casos de estudios, de los cuales 7 son con respecto a pruebas de flexión y torsión en el área del alma del dispositivo, 6 casos de estudio consisten en los análisis de la interacción de un modelo 3D de un hueso con OI y las diferentes roscas propuestas, con la finalidad de determinar la resistencia mecánica ejercido en el sistema óseo, finalmente, 2 casos de estudio del tejido óseo afectado con OI sin implante y con un dispositivo intramedular colocado.
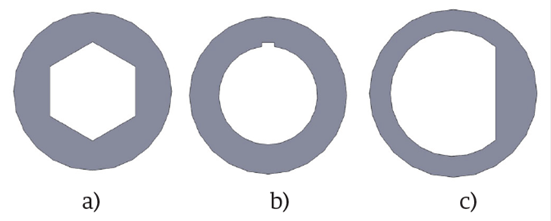
Se propusieron diferentes secciones transversales con las que se pueden atacar los problemas de rotación del implante macho. Las geometrías propuestas para el diseño de un nuevo clavo telescópico son: polígono hexagonal, circular con pestaña y un semicírculo 3/4 de caña, como se observa en la Figura 1.
Prueba de flexión
Se realizó el análisis numérico en el dispositivo Fassier-Duval™ utilizando las condiciones de flexión en cuatro puntos establecidas por la norma ASTM 1264 para dispositivos intramedulares, con la finalidad de obtener un marco de referencia con el cual comparar las nuevas propuestas. Las propiedades del material empleado para el análisis numérico corresponden a un Acero Inoxidable 316L grado médico, el cual cuenta con un módulo de Young de 200 GPa, un coeficiente de Poisson de 0.268 y un límite elástico de 170 MPa [8].
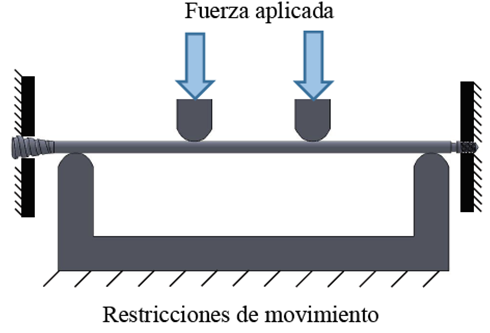
Dentro de la literatura se conoce la biomecánica de las fuerzas que interactúan dentro de los huesos de la pierna, por lo que, se determinan las cargas con base al peso del paciente y la curvatura del hueso, metodología que se emplea en la determinación de las cargas aplicadas al sistema propuesto del clavo intramedular [9]. En el desarrollo del trabajo, se considera un paciente de estudio que presenta OI tipo III de 6 años de edad y un peso de 11 kg.
Con base en lo anterior, se aplicó una carga perpendicular de 100 N para simular el caso más extremo del paciente, el cual refiere a una bipedestación (Figura 2).
A continuación, se efectúa el discretizado de las piezas dentro del análisis, para eso se realiza un mallado libre con elementos triangulares. La Tabla 1 muestra el número de elementos y nodos de los casos analizados.
Prueba de torsión
Se realizaron pruebas de torsión establecidas dentro de la norma, a los 3 diseños propuestos para determinar su resistencia a la misma, y prevenir rotaciones que provoquen una deficiente rehabilitación en los huesos largos de los pacientes con OI.
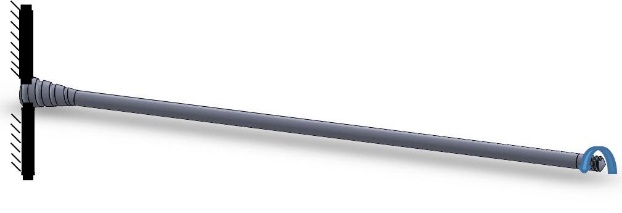
Las condiciones bajo las que se someterá el estudio consistirán en aplicar un punto de sujeción en el extremo del implante externo y una fuerza de torsión de 0.6 N/m en el extremo del implante interno. Se utiliza esta magnitud debido a que, al realizar el movimiento del tobillo, el único elemento que genera resistencia es el peso del pie, el cual se considera equivale al 1.5% del peso total de una persona, en este caso el paciente pesa 11 Kg, por lo que el pie equivaldría a 0.165 Kg.
Considerando que el pie actúa en forma de palanca con respecto a la tibia, se consideran el peso del pie como una masa puntual en el centro del pie, la cual se ubica a 2.5 cm del eje de la tibia, genera un par torsor de 0.6 N/m sobre el implante macho (Figura 3).
De igual manera al caso anterior se realizó un mallado libre en los dos implantes del dispositivo intramedular. A continuación, en la Tabla 2 se observan los elementos y nodos generados para los análisis.
Análisis numérico en ensamble rosca-epífisis
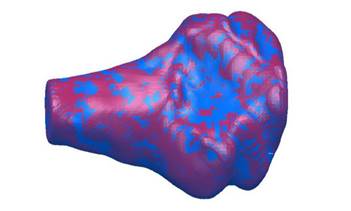
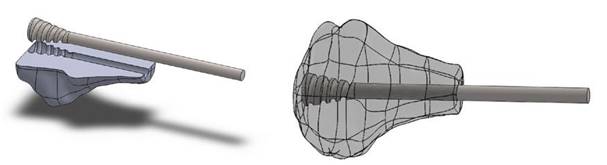
Se realizaron análisis numéricos considerando un ensamble hueso-implante. Para este se obtuvieron modelos tridimensionales de las epífisis de los huesos del paciente de 6 años con OI. Esto se llevó a cabo mediante la realización de una tomografía axial computarizada (TAC) a un paciente con OI tipo III. El estudio tomográfico entrega una serie de imágenes en un formato denominado DICOM. Las imágenes fueron procesadas mediante el programa de cómputo ScanIP®, el cual permite realizar modelos virtuales del hueso. Posteriormente, con el apoyo del programa CAD Solidworks® se corrigió la superficie del modelo para convertirlo a un sólido exportable a un programa de cómputo de análisis mediante elemento finito.
Diferentes modelos de rosca son empleados para establecer la interacción que existe en la fijación hueso-implante. La Figura 4 muestra el modelado de la epífisis distal de la tibia del paciente con OI.
Se realizó la parametrización de los clavos telescópicos considerando las roscas empleadas actualmente para el tratamiento de la OI. Adicionalmente, se efectuaron rediseños de los clavos modificando el perfil de la rosca, con la finalidad de conocer los esfuerzos generados en el tornillo, así como en el hueso del paciente (Figura 5 y Figura 6).

Figura 5 Modelos de rosca para epífisis distal. a) Rosca original. b) Rosca Cortical. c) Rosca ACME.
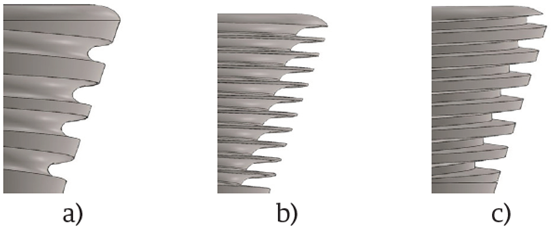
Figura 6 Modelos de rosca para epífisis proximal. a) Rosca original. b) Rosca Cortical. c) Rosca ACME.
Se trasladaron los modelos CAD de la tibia al software SolidWorks®, con la finalidad de generar ensambles entre el implante macho del clavo telescópico y la epífisis, mostrado el ensamble en la Figura 7.
Para el análisis se introdujo al programa de cómputo, las propiedades mecánicas del hueso con OI, las cuales, un coeficiente de Poisson dentro de la literatura se indica que posee un módulo de Young con valores cercanos a 12 GPa de 0.24 ± 0.08 y un límite elástico de 49 MPa, mientras que al dispositivo intramedular se le asignaron las propiedades mecánicas del Acero Inoxidable 316L el cual cuenta con un módulo de Young de 200 GPa, un coeficiente de Poisson de 0.268 y un límite elástico de 170 MPa.
Dentro de la literatura, se indica que pacientes con OI tipo III, durante su infancia, el crecimiento más notable que sufren llega a ser entre 10 y 12 cm de su estatura total, la cual representa en la tibia un crecimiento promedio de entre 3 y 4.5 cm [10]. Sin embargo, como se explicó anteriormente, estos dispositivos, al ser telescópicos se van alargando al mismo ritmo que el hueso, por lo que la reacción generada en la rosca es mínima. Las condiciones de frontera empleadas para este caso de estudio consistieron en colocar una fijación en las epífisis, al mismo tiempo que se ejercía una fuerza de tensión de 50 N sobre el dispositivo, la cual será la misma en todos los análisis para poder realizar las comparaciones de los esfuerzos en la rosca,
En la siguiente Tabla 3, se muestra la cantidad de elementos y nodos generados mediante el mallado libre para el análisis de la rosca y la epífisis.
Análisis numérico en ensamble hueso-implante
Finalmente, en los últimos dos casos de estudio se procedió a realizar un análisis considerando un ensamble total del hueso y el dispositivo mostrado en la Figura 8, el cual fue sometido a cargas de flexión, considerando al hueso como una viga en cantiléver y simulando los movimientos de desplazamiento de un niño pequeño con los implantes colocados.
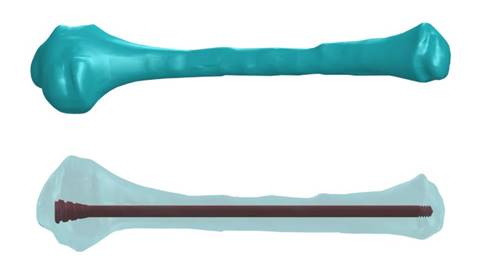
Para estos análisis el mallado libre para el hueso sin implante arrojo una cantidad de elementos de 8763 y de 13898 nodos, mientras que para el ensamble entre hueso-implante género 20068 elementos y un total de 32623 nodos.
Resultados y discusión
Los resultados muestran esfuerzos, desplazamientos y deformaciones unitarias de los casos de estudio establecidos; de la misma manera, se recopilaron los datos en la Tabla 4, la Tabla 5, la Tabla 6, la Tabla 7 y la Tabla 8 con la finalidad de comparar el cambio geométrico del alma del implante macho y el anclaje en el ensamble del sistema.
Tabla 4 Resultados de análisis numérico en 4 puntos de flexión.
| Clavo | Esfuerzos σ (MPa) | Desplazamientos δ (mm) | Deformaciones Unitarias ε |
|---|---|---|---|
| Fassier-Duval® | 433.32 | 0.63742 | 0.003382 |
| Hexagonal | 373.72 | 0.63196 | 0.00103 |
| Circular con pestaña | 448.88 | 0.55171 | 0.0008546 |
| Semicírculo 3/4 de caña | 338.844 | 0.5663 | 0.001218 |
Tabla 5 Resultados de torsión en dispositivos intramedulares.
| Clavo | Esfuerzos σ (MPa) | Desplazamientos σ (mm) | Deformaciones Unitarias ε |
|---|---|---|---|
| Hexagonal | 973.47 | 0.2321 | 0.003111 |
| Circular con pestaña | 1289.941 | 0.1731 | 0.004584 |
| Semicírculo 3/4 de caña | 575.76 | 0.19966 | 0.001648 |
Tabla 6 Resultados en epífisis distal.
| Tipo de rosca | Esfuerzos σ (MPa) | Desplazamientos σ (mm) | Deformaciones Unitarias ε |
|---|---|---|---|
| Fassier-Duval® | 23.425 | 0.00203 | 0.000394 |
| Cortical | 42.579 | 0.002157 | 0.00293 |
| ACME | 18.8 | 0.00204 | 0.000495 |
Tabla 7 Resultados en epífisis proximal.
| Tipo de rosca | Esfuerzos σ (MPa) | Desplazamientos σ (mm) | Deformaciones Unitarias ε |
|---|---|---|---|
| Fassier-Duval® | 16.139 | 0.00217 | 0.000348 |
| ACME | 30.565 | 0.002094 | 0.001355 |
| Cortical | 55.464 | 0.00228 | 0.001411 |
Tabla 8 Esfuerzos del análisis en el ensamble hueso-implante.
| Esfuerzo sobre la superficie del hueso MPa | Esfuerzo en epífisis distal MPa | Esfuerzo en epífisis proximal MPa | |
|---|---|---|---|
| Hueso sin implante | 402.06 | 14.92 | 4.24 |
| Hueso con implante | 260.22 | 67.60 | 57.07 |
Los resultados de la Tabla 1 y la Tabla 2 muestran los resultados de los primeros 7 casos de estudios correspondientes al análisis de flexión y torsión de los implantes con la modificación geométrica en el alma del dispositivo.
A continuación, se observan los resultados de los análisis ejecutados a las roscas propuestas y el modelo tridimensional de un hueso con propiedades de OI. La Tabla 6 muestra los resultados para el caso de la epífisis distal, donde es la rosca del implante macho la que interactúa con esta y la Tabla 7 la interacción entre implante hembra y epífisis proximal.
Asimismo, en la Figura 9 se puede observar un diagrama que permite observar las zonas que sufren un mayor desplazamiento al momento de ejercer una fuerza axial a lo largo de la epífisis.
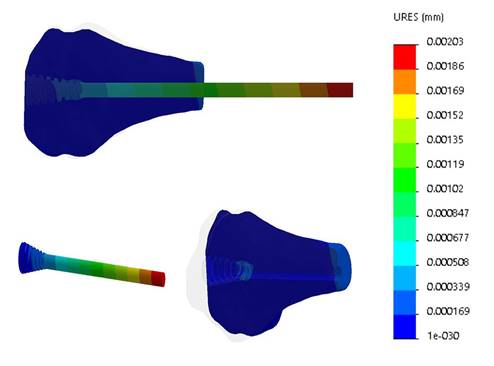
Finalmente, se observó que, al colocar el implante dentro del hueso se evita la flexión del tejido óseo, como se observa en la Figura 10, los esfuerzos se concentran en el dispositivo intramedular, permitiendo mantener el hueso recto y así, prevenir fracturas.
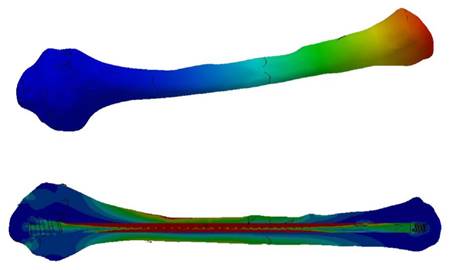
Los esfuerzos encontrados en el hueso con el dispositivo intramedular son menores comparándolos con el hueso sin implante, lo siguiente se puede observar en la Tabla 8, donde se exhibe el esfuerzo máximo encontrado en la superficie del hueso en ambos análisis, mientras que el generado en las epífisis del hueso aumenta debido al anclaje generado por el dispositivo.
Lo anterior radica en las propiedades mecánicas de los elementos implicados en el ensamblaje, como se observa en la Figura 10, el acero inoxidable 316 L, posee una mayor resistencia a deformarse, por lo que puede decirse que, en un análisis a flexión, el hueso únicamente se deformará en el punto que el implante sufra una deformación.
Conclusiones
Con los datos obtenidos se puede observar fácilmente que la propuesta con mayor rigidez a la torsión es el clavo semicírculo 3/4 de caña. Mientras que el clavo que sufre una mayor deformación es el circular con pestaña, por lo que se puede concluir que, si bien el clavo circular con pestaña ofrece una mayor rigidez a la flexión, es fácilmente deformable a la torsión.
Con base en los resultados numéricos obtenidos de las propuestas en flexión y torsión, se puede concluir que, dentro de las geometrías propuestas, la de sección semicírculo 3/4 de caña es la que presenta una menor concentración de esfuerzos a la flexión, así como una menor deformación, bajo esta hipótesis este sería el rediseño con el que se pueden atacar las debilidades existentes dentro del clavo comercial que actualmente se utiliza para el tratamiento de la OI.
De acuerdo con los resultados de los análisis realizados a las roscas se puede observar que la ACME presenta una menor cantidad de esfuerzos en la zona de la epífisis distal, con lo que se puede argumentar que este tipo de rosca al no sufrir concentraciones de esfuerzos no daña la integridad del hueso, por consiguiente, la sujeción del implante con el hueso es mayor que con la rosca con la que actualmente cuneta el dispositivo.
En el caso de la epífisis proximal, el tipo de rosca que presenta menor concentración de esfuerzos es la que actualmente se encuentra en el dispositivo intramedular comercial, si bien los esfuerzos generados entre la rosca ACME y el clavo comercial crecen aproximadamente el doble, en esta sección debido a la forma cónica del extremo roscado proporciona una mayor sujeción entre el clavo y la epífisis, en cuanto al análisis tibial se refiere.
Finalmente, se observa que el clavo telescópico, le brinda una mejor resistencia ante los desplazamientos, asimismo, se encarga de actuar de concentrador de los esfuerzos que se generan durante la aplicación de la carga y de esta manera reducir los esfuerzos en el hueso.
Con los resultados obtenidos, se continuará la investigación realizando la manufactura del dispositivo intramedular con la finalidad de realizar pruebas experimentales ex vivo planteadas en este trabajo, en tejido óseo de carnero, esto debido a la similitud del canal intramedular con el tejido óseo humano con condiciones de OI.

