











 nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introduction
The model-free Intelligent PID controller or iPID controller was introduced by Fliess, Join, Mboup and Sira-Ramírez in Join et al. (2006) and Fliess et al. (2006a and b) taking into account unknown dynamics of the plant by using an ultra-local model approach without any modelling procedure. The iPD uses an online numerical algebraic differentiator (Fliess & Sira, 2003; Mboup et al., 2007) to estimate the plant unknown dynamics implemented as an integral filtering a noisy signal. The performance of such a proposed iPID control scheme has been tested for example systems and for models of real systems in simulation as well as for real-time control of physical systems. We shall present only a limited number of references from a much larger number of the published research papers regarding the model-free Intelligent control.
To illustrate the versatility of the model-free iPID control scheme, Fliess, Join and their co-workers applied extensively the model-free intelligent control approach through computer-based simulation. Some references of concerning example systems are an unstable single input single output system (Fliess & Join, 2014); an unstable 3rd order system; a 2nd order delayed system (Doublet et al., 2017); a 2nd order nonlinear system with sign function (Fliess & Join, 2018); a one dimensional heat equation (Fliess & Join, 2018) or a 2nd order linear unstable system (Fliess & Join, 2018). Moreover, Fliess, Join and their co-workers also tested model-free control through computer-based simulation for models of physical systems, for example: a microalgae growth in a closed bioreactor (Tebbani et al., 2016); acute inflammatory response to pathogenic infection (Bara et al., 2016); a freeway traffic flow model (Abouaïsa et al., 2017); a highway multi-ramp inflow traffic regulation (Join et al., 2021) or a multivariable longitudinal and lateral vehicle model (Menhour et al., 2018). In all these applications the model-free control scheme proves its clear advantages over standard model-based PID control. In what follows we shall call iPD control the scheme that consists of an intelligent model-free Proportional and Derivative controller. The intelligent model-free Proportional and Integral control scheme will be just denoted iPI control.
Model-free based control beyond iPID control has also been explored, basically through computer-based simulation. Some examples are: Wang, Tian and their co-workers applied a modified model-free control introducing an adaptation of the model free α parameter for an iPID control scheme with the time-delay estimator (Wang et al., 2020) and adding an adaptive iterative learning compensator and an initial state learning scheme applied to a back-support Exoskeleton (Wang et al., 2021); Chekakta and his co-workers applied a modified iPD controller where the controller gains are tuned using a fuzzy logic system for trajectory tracking of a quadrotor model (Chekakta et al., 2020); Olama and his co-workers applied the model-free approach to control the building end-user power allocation for residential and commercial heating, ventilation, air conditioning and water heater units for a building thermal model in a large-scale power distribution system model (Amasyali et al., 2020); Baciu and his co-workers applied an iPD controller applied an iPD controller for an inverted pendulum system model comparing to a sliding mode controller (Baciu & Lazar, 2020); Elleuch and Damak applied a modified iPD controller combined with a sliding mode control scheme to a robot manipulator model including actuator dynamics (Elleuch & Damak, 2020); Huba et al studied the tuning of iPD controller (Huba et al., 2020); Bembli et al applied a modified iPD control combined with a terminal sliding mode control scheme to an exoskeleton upper limb system model (Bembli et al., 2021); Li et al applied a model predictive current control using an ultra-local model and a sliding mode observer for the estimation to a surface-mounted permanent magnet synchronous motor model (Li et al., 2021); Sehili and Boukhezzar applied an iPID for a direct current motor model (Sehili & Boukhezzar, 2022).
As far as the experimental application of model-free control is concerned, Flies, Join and his co-workers applied for example an iP controller for a greenhouse controlling heating and fogging (Lafont et al., 2014) an iPD controller to drive the pitch, roll and yaw of an acrobatic quadrotor (Clouatre et al., 2020) and both an iPD controller and an iPID controller to a laboratory half-quadrotor (Fliess & Join, 2021).
Other researchers that presented experimental results using the model-free approach, are for example: Ferrari et al. that applied an iP to a diesel-wind microgrid diesel-system model generated HIL dynamics (Ferrari et al., 2021). Han et al. applied an iPD to a 12-dof lower limb exoskeleton replacing the algebraic estimator with a discrete-time extended state observer and computing desired velocities and accelerations with sigmoid function-based tracking differentiator (Han et al., 2020). Quin et al. applied an iPD to a 2-dof laboratory helicopter adding a sliding mode compensator control term and replacing the algebraic estimator with a high pass filter and adding an outer compensation loop using an actor-critic neural network (Quin et al., 2020).
The model-free control approach shows that it is an effective control strategy for a quite wide variety of control applications. However, the estimate of the system unknown dynamics, that play a key role in the control scheme, has received little attention and has only been presented in computer-based simulations. Indeed, Fliess, Join and his coworkers in (Fliess et al., 2006a and b) show the curves for the estimation of unknown dynamics and in (Villagra et al., 2009) the authors show that the estimation, using the algebraic estimator, is closed to the road slope, rolling resistance and aerodynamic force terms; nonetheless it is not clear how these terms where simulated. In this paper we present experimental real-time results to study the estimation of unknown nonlinear HIL generated dynamics using for this purpose a programable load servomotor coupled to a control servomotor.
The rest of our paper is organized as follows, the following section includes a brief presentation of model-free intelligent control including the estimation integrals and the finite impulse digital filter (FIR) coefficients calculation. We then present the HIL servomotor setup, and a nonlinear model used to generate load dynamics. Afterwards we will show the real-time results, finishing with some concluding remarks.
Intelligent iPD control
The data driven intelligent controller or iPD is a control scheme introduced in Fliess et al. (2006a), (Join et al. (2006), Fliess et al. (2006) is based on the ultra-local model:
Parameter v is the derivation order that in general is 1 or 2. y(t) stands for the output signal of the system, u(t) stands for the control signal, and F(t) denotes unmodeled dynamics. Parameter α is chosen such that when multiplied by u(t) has the same units as F(t).
Using v=2 the iPD control law is given by:
Where the proportional controller gain K
p
, the derivative controller gain K
d
, and α are parameters that are required to be tuned.
Using control law (2) in (1) and considering that
K
p
and K
d
controller gains are selected such that the roots of the corresponding characteristic equation in (3) have strictly negative real parts to ensure that
The unmodeled dynamics estimation term F est as in Fliess & Join (2021), can be approximated taking the Laplace transform of equation (1) considering F est is constant in a small interval, which is to say:
Deriving twice equation (4) with respect to s, eliminates the initial conditions:
Multiplying both side of equation (5) by s -3 , allows to remove the positive power of s and filter corrupting noise using iterated integrals:
The time domain for the right side of (6) is accomplished using the inverse transformation rule:
The time domain for the left side terms of (6),
Using equations (6), (7) and (8) with a=t-τ, the unmodeled dynamics estimation F est is approximated with:
The integrals in this equation are implemented (Mboup et al., 2009) using a Finite Impulse Response (FIR) digital filter with impulse response
The weight values W k correspond to Δx k of the trapezoidal numeric integration rule with sampling period T s :
Where
Each integral in equation (9) is approximated at time t by:
In the above equation
We can at this level present our HIL servo motors setup as well as the corresponding model.
HIL Servo motors setup and model
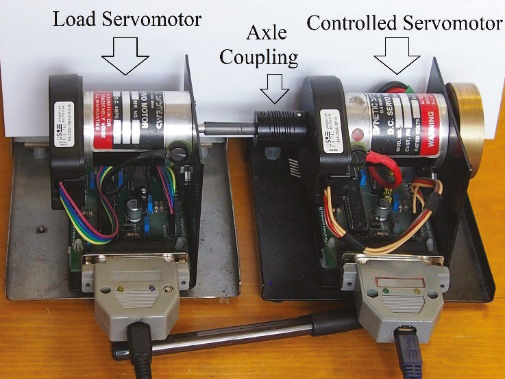
In Figure 1 we present a picture of the two servo motors coupled by their motor shafts used for the Real-Time experiments. Each servo mechanism includes a direct current (DC) motor, a Peripheral Interface Controller (PIC), a high-speed USB communication microcontroller, a digital magneto resistive isolator, an analog galvanic isolator amplifier, an incremental encoder, an H-bridge and the necessary power supplies for all components. Full details of the servo mechanism, including the system schematic, can be found in González et al. (2018). As software development platform we used Matlab/Simulink (The Math Works, 2012) and the QuaRc (Quanser, 2011). RealTime Kernel with T s =0.0015 sec sampling period. The servo mechanism includes a 10 khz low level current controller allowing the control (or input) signal to be proportional to the torque developed by the DC motor. The peak reference input current, that is the control signal, is limited to [-1,1] amps for the low level current loop PI controller.
The coupled motor shafts change the controlled servomotor behavior adding friction and inertia. We employ a first order model for the DC motor where parameters are obtained using a closed loop identification method presented in Soria et al. (2010) when output is the speed of motor shaft. We add an integrator to this model to obtain position of the motor:
If we take v=2 in equation (1) this model in the time domain corresponds to:
Using the identification method mentioned above, we obtained b=94.03 and a=2.45. It should be noted that when first performing the identification of the coupled servomotors, load servomotor input is u HIL (t)=0. Parameter b is related to the amplifier gain and rotor inertia whereas parameter a is related to friction and rotor inertia. Model (14) can be written like equation (1) as:
When validating model (15) we found that the coupling of the servomotors introduces a perturbation that can be considered adding to model (15) a gravity term:
Using the method presented in Garrido & Soria, (2005) to estimate gravity terms, we identified parameter K int =0.1267.
In (16)
This torque adds the non-linear term
Using method Garrido & Soria (2005) we identified parameter K HIL =0.9013 for the coupled servomotors with HIL torque given by (17).
The proposed model for the servomotors setup with axle coupling includes a friction and gravity terms:
With
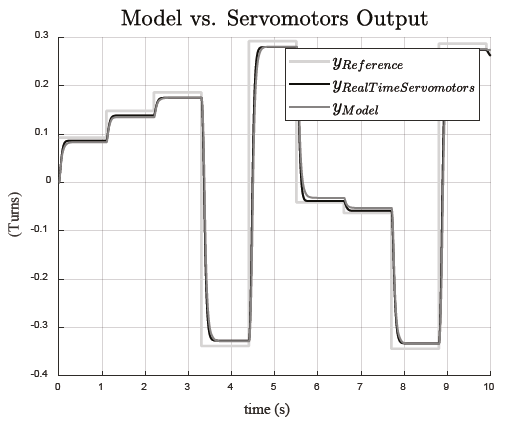
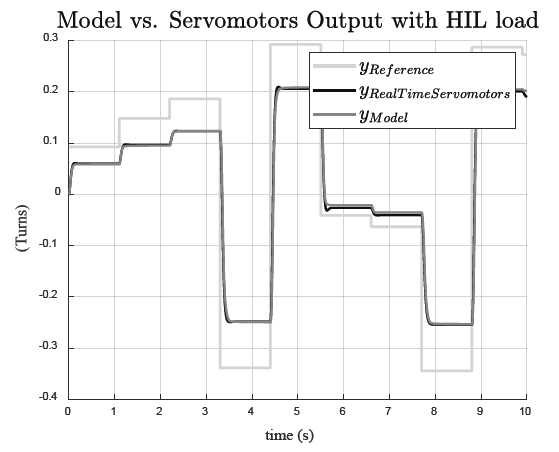
It can be noticed in Figure 3 that the behavior of the real servomotor setup and model (19) are close allowing to confirm that the HIL allows to generate the load torques to the real coupled servomotors.
Simulation and real-time results
We present simulation and real time control results with
Estimation of
In the simulation and the real time results we manually tuned the required parameters as in most of the published literature about iPD control, setting sliding window size M=80, α=94.03, Kp=710.59 and Kd=39.81. The controller gains were tuned for
Figure 4 shows the control results when
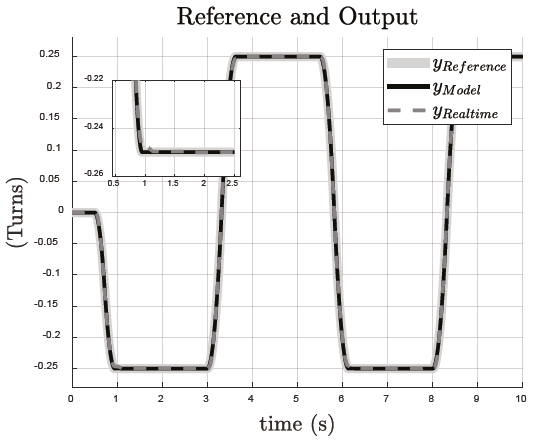
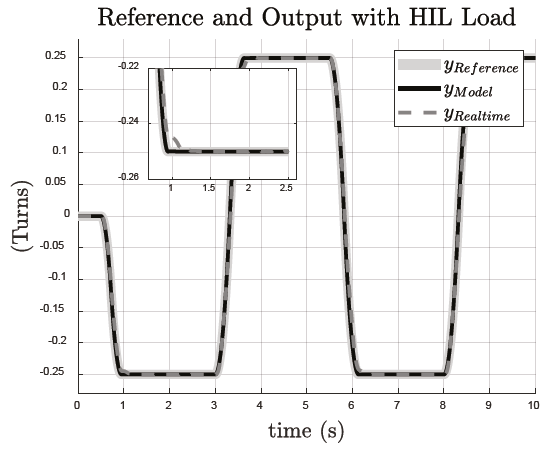
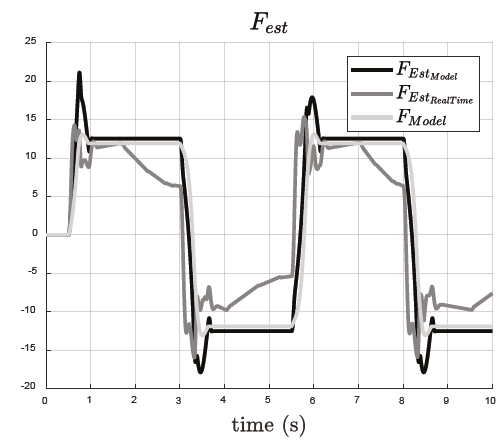
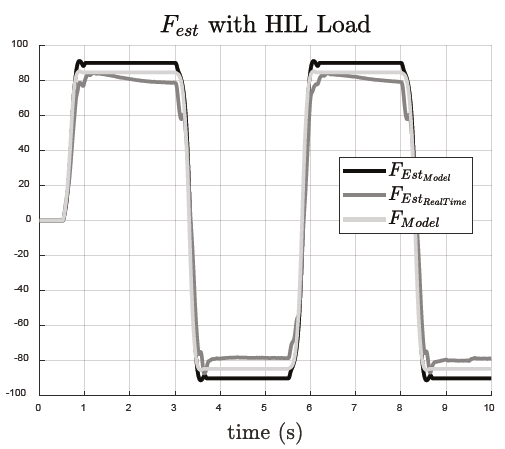
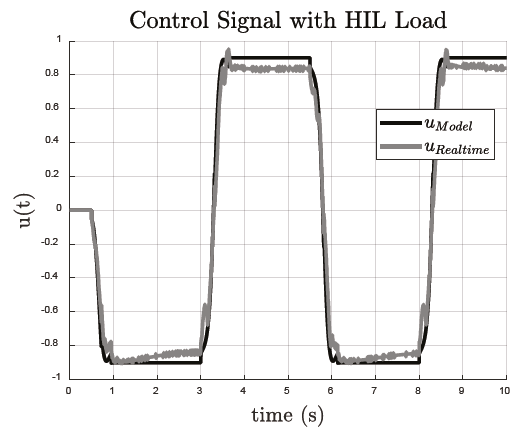
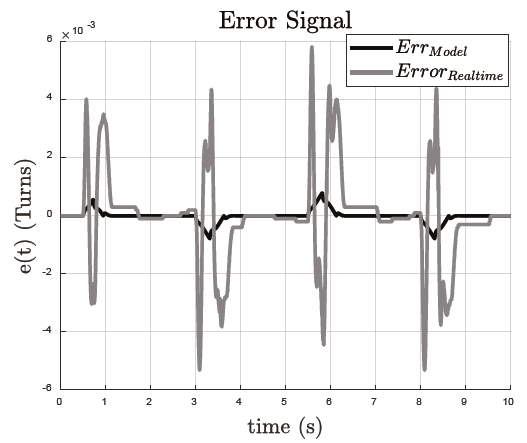
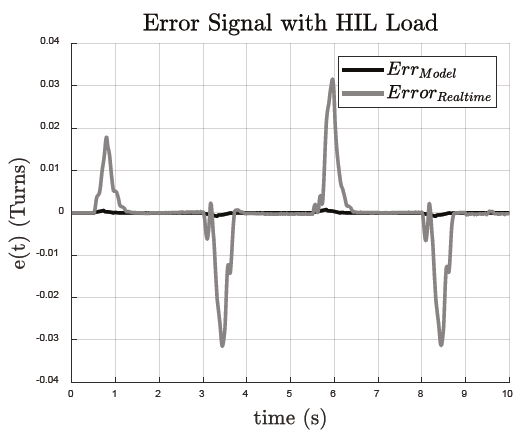
Figure 6 shows the F(t) dynamics for
Figure 7 shows the
Conclusions
The model-free intelligent control approach has shown its effectiveness in several model and real-time applications considering unknown dynamics employing an estimation integral. The estimation depends on the sampling period for real-time application and the approximation sliding window size that should be small enough so it will not introduce too much delay. Our experimental results show that lose-loop dynamics not zero and condition

