












 (pdf)
(pdf)




 SciELO
SciELO  SciELO
SciELO 
 Permalink
Permalink
Introducción
De acuerdo con el balance nacional de energía 2022 (SENER, Mx., 2022), a nivel mundial las energías renovables producen 14.68 % de la energía primaria y tienen un 14.70 % de participación en la oferta interna bruta de energía, 2021. En el contexto nacional, la producción de energía primaria en 2022 fue de 7468.99 Petajoules, 1150.13 de estos fueron aportados por las energías renovables (15.40 %) y la energía eólica contribuyó con 180.54 Petajoules, un 15.70 % de la aportación total de las fuentes renovables. Este incremento en la energía eólica se debe principalmente a la elevada inversión de los aerogeneradores de eje horizontal (Horizontal Axis Wind Turbine, HAWT) y a la falta de zonas con potencial eólico para hacer rentable la inversión. Por otra parte, los generadores eólicos de eje vertical (Vertical Axis Wind Turbine, VAWT) tienen la ventaja, respecto a los HAWT, que son omnidireccionales sin necesidad de un sistema de control de dirección, cuentan con una mejor estética, tienen mayor eficiencia en entornos turbulentos y tienen menores emisiones sonoras (Firdaus et al., 2015). Además, trabajan con velocidades de viento mucho menores a los de eje horizontal. Aunque en la mayoría de los casos es necesario tener un sistema de accionamiento inicial.
Los aerogeneradores de eje vertical de baja potencia (0.5-1 kW) tienen un amplio uso en zonas urbanas, debido a que pueden operar con velocidades de viento de 1 m/s, según su tipo. Los generadores de eje vertical tipo Darrieus han ganado mucha popularidad debido a su reducida variación en el coeficiente de potencia, bajas emisiones de ruido y alta confiabilidad (Tjiu et al., 2015). Para maximizar la extracción de energía de estos dispositivos hay que elegir el perfil adecuado para diseñar las palas, según el recurso eólico de la región donde se instalará. En México, el desarrollo de las turbinas eólicas de baja potencia, diseñados para una región específica, es decir, de acuerdo con el potencial eólico de la zona en donde se instalará (velocidad de viento promedio anual), es escaso.
Se han propuesto diseños de aerogeneradores de eje vertical y horizontal, de baja potencia, como los desarrollados por (Chávez, 2010; Hernández et al., 2012; García et al., 2014; Mendoza, 2017; Chimal & Palomares, 2018), quienes proponen dispositivos capaces de generar hasta 10 kW de potencia, con aplicaciones residenciales. A nivel internacional, también se han hecho esfuerzos para desarrollar aerogeneradores de baja potencia, entre los cuales se destacan los desarrollados por (Luis Mantecón, 2015; Cortés, 2015; Cuesto, 2019; Ramírez, 2021). Sin embargo, como se mencionó previamente, no se hacen diseños específicos de aerogeneradores para una región en particular. El objetivo de este trabajo es diseñar el rotor de un aerogenerador de eje vertical tipo Phi, mediante el software Qblade y validar el diseño con el trabajo experimental desarrollado por Blackwell y colaboradores en Blackwell et al. (1976). Los parámetros de diseño son las dimensiones del aerogenerador y la velocidad promedio anual del viento en la ciudad de Chetumal, Quintana Roo.
Desarrollo
Materiales y métodos
Para el desarrollo del presente trabajo se empleó el software Qblade (Marten & Wendler, Qblade guidelines, Ver. 0.6, 2013), (Marten et al., 2015), el cual es de uso libre, desarrollado por el grupo de energía eólica de la Universidad Técnica de Berlín. Tiene como principal característica la integración de herramientas adecuadas para el diseño de perfiles aerodinámicos, evaluación aerodinámica e integración de estos para la simulación de rotores. Debido a esta característica Qblade permite realizar diseño de rotores de forma rápida al evitar el trabajo en múltiples softwares y la exportación de archivos. Por otro lado, su interfaz gráfica es intuitiva y permite mucha fluidez en el diseño tanto de álabes, rotores y aerogeneradores. La metodología para realizar una simulación en Qblade se incluye en el diagrama de flujo de la Figura 1.
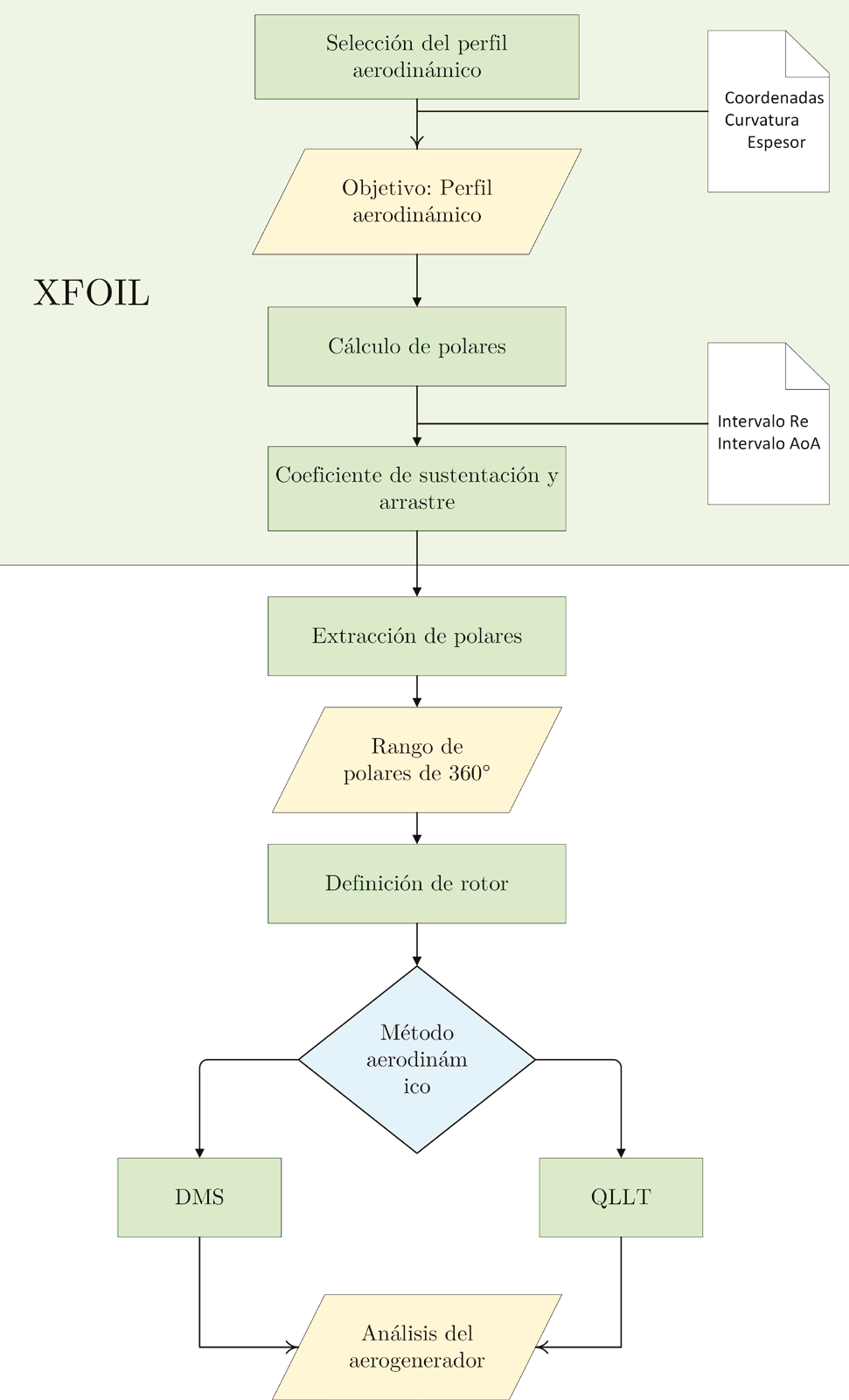
De acuerdo con la metodología de diseño de aerogeneradores de Manwell et al. (2010) y a la evaluación de perfiles en Mohamed (2012) se seleccionó el perfil aerodinámico para la generación de polares mediante el código XFoil, posteriormente se define el rotor y se selecciona el método aerodinámico para analizar el desempeño, como a continuación se describe.
Selección de perfil y evaluación aerodinámica
La selección del perfil aerodinámico es una de las fases de mayor importancia para diseñar el rotor, en particular para rotores de potencia baja, ya que la velocidad de viento junto a dimensiones relativamente pequeñas respecto a los rotores convencionales (que operan en el rango de MW), implica que el funcionamiento de estos sistemas coincida con el régimen de número de Reynolds bajo (aproximadamente 105). El rango mencionado no coincide con el de diseño de los perfiles convencionales, los cuales se utilizan en la industria de aeronaves donde el número de Reynolds es alrededor de 30 millones (Tjiu et al., 2015), por lo tanto, hay pocos datos experimentales.
El perfil aerodinámico para aerogeneradores de eje vertical influye directamente en la generación de energía del aerogenerador. Existen diversas investigaciones numéricas en donde el perfil aerodinámico es analizado (Tirandaz & Rezaeiha, 2021). Sin embargo, debido a la aerodinámica transitoria de los aerogeneradores verticales (Rosado et al., 2020), no existe una teoría establecida para la selección de dichos perfiles. Gran parte de las investigaciones que se han realizado emplearon dinámica computacional de fluidos (Elssaka et al., 2021). Debido al costo computacional, es decir, el tiempo de simulación y la capacidad del ordenador, emplear dicho método numérico en la etapa de diseño resultaría inconveniente (Marten, 2020).
El software Qblade permite importar la geometría de la mayoría de los perfiles aerodinámicos, así mismo con el código XFoil se determina el desempeño aerodinámico de estos. XFoil (Drela, 1989) es una herramienta muy usada en la evaluación aerodinámica (estimación de las polares) por su precisión respecto al tiempo de cálculo mínimo. El código mezcla el método de panel de flujo potencial (potencial Flow panel method), con la formulación de capa límite para analizar los efectos de viscosidad predominantes, en los puntos críticos de la geometría respectiva. La metodología se desarrolló para el ámbito de aeronáutica, por lo que, el rango de los ángulos de ataque que admite la evaluación corresponde a valores previos a la entrada en pérdida. Convenientemente el rango de cálculo es apropiado para el propósito de este trabajo, ya que el ángulo de ataque para aviones se ubica entre -10 ° a 15 °. Por otro lado, se debe resaltar que, para los VAWTs, el rango es mayor, especialmente cuando arrancan, así que los valores se extrapolan para el rango completo de -180 ° a 180 °.
La extrapolación de las polares se puede realizar por varios métodos, Qblade permite elegir entre dos, el primero conocido como Viterna-Corrigan (Viterna & Janetzke, 1982), que es considerado una práctica estándar en la industria, el cual satisface la teoría de placa plana “flate plate theory” que consiste en que los perfiles aerodinámicos se deben comportar linealmente en ángulos de ataque pequeños, como se espera teóricamente.
Una particularidad del método Qblade consiste en que es fácil de configurar, ya que solo necesita pocos datos de entrada. Se requiere el ángulo de ataque de entrada en pérdida, además del coeficiente de sustentación y arrastre en dicho punto. Sin embargo, por la sencillez del método no permite configuraciones adicionales para corregir la curva resultante.
El siguiente método es el de Montgomerie (2004) que mezcla una formulación de flujo potencial con “flat plate theory” para obtener la curva. Este tiene más autonomía para modificar la curva debido a las variables que se pueden sintonizar. Así mismo, para la extrapolación de polares en Bianchini et al. (2016) se realiza una comparativa de métodos y el Montgomerie resulta con buen desempeño, por lo tanto, se emplea en este desarrollo.
Diseño del rotor en Qblade
Para desarrollar el diseño del sistema en el software Qblade, se debe ingresar la geometría mediante las coordenadas del álabe a diferentes alturas desde la base hasta la punta superior.
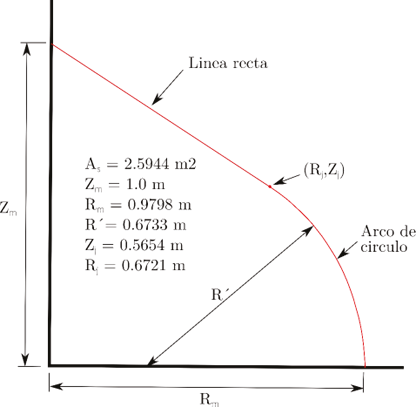
Así mismo, para la definición completa del rotor tipo H que tiene álabes rectos, es suficiente con la definición de las coordenadas en los extremos, es decir, la base y la punta superior. Por otro lado, cuando se diseña el sistema tipo phi se deben describir muchas más secciones por la curvatura que lo caracteriza. Durante el periodo de investigación en los laboratorios Sandia se desarrolló una geometría simplificada de la conocida como Troposkien. En la actualidad es conocida como geometría Sandia (Reis & Blackwell, 1975). Dicha simplificación implica una mayor facilidad en la construcción de los álabes conservando los beneficios de distribución de cargas en operación. La geometría sandía consta de dos líneas rectas en los extremos y un segmento de arco en el centro como se muestra en la Figura 2, con las características definidas que utilizan las etiquetas A como área, Z para los segmentos de línea recta y R para radio, respectivamente.
Simulación DMS y QLLT
Para el análisis de VAWTs el software Qblade ofrece dos modelos aerodinámicos:
El método DMS (Double Múltiple Streamtube, por sus siglas en inglés), es una formulación que emplea un balance de cantidad de momento lineal y la teoría de continuidad. En el DMS se divide al rotor en dos secciones, una zona a barlovento y una a sotavento, y además cada zona se divide en N número de secciones. Para calcular con precisión la velocidad real que impacta sobre el aspa (velocidad relativa), este método calcula por iteraciones la velocidad inducida por la presencia de las aspas y la rotación del rotor y define la velocidad relativa de las aspas mientras estas van rotando (Parashivoiu, 2002). La teoría de las líneas de sustentación de Qblade (QLLT, Qblade lifting line por sus siglas en inglés), considera el aspa como una línea de sustentación que pasa a ¼ de la cuerda del perfil y que además requiere determinar la influencia que tienen las secciones laterales del aspa sobre la sustentación en cada sección. Es decir, calculando la circulación y la vorticidad se puede determinar la sustentación real en cada sección del aspa. Con este método, la influencia de la estela detrás del rotor, también se tiene en cuenta en el cálculo final de la potencia del aerogenerador (Marten, 2020).
Por un lado, el método computacional DMS se utiliza de manera muy amplia en la industria cuando se trata de diseñar rotores, principalmente para las primeras etapas de diseño que tienen como finalidad comparar muchos modelos. Esta metodología la desarrolló Ian Paraschivou al mejorar el método de momentum cuando consideró dos “actuator disk”, al seccionar el rotor en dos y analizar la conversión de energía. La primera zona conocida como “upwind” consiste en la primera interacción del viento con el rotor y la segunda zona nombrada “downwind” es donde el viento deja el rotor.
Las ecuaciones que describen el comportamiento de la velocidad del viento para el método DMS, en la primera zona, la velocidad Vz1 queda como en la ecuación (1):
Donde
V∞i = |
velocidad variable a través de la altura del rotor |
Uu = (Vau /V∞i) = |
factor de interferencia de la sección |
Vau = |
velocidad inducida |
Por otro lado, la ecuación que describe el comportamiento de la velocidad del viento en la segunda zona Vz2 se expresa en la ecuación (2):
Donde Ud es la velocidad en la descarga, que es parte del factor de interferencia en esta sección.
Por otro lado, la metodología QLLT es un modelo computacional de los conocidos como “Vortex method”, el cual se plantea como flujo potencial y con ello se determina el campo de velocidad en el contorno del generador eólico con la influencia de la vorticidad en la estela de los alabes (Jin et al., 2015). Para este último método, las áspas de la turbina eólica se representan mediante componentes nombrados “lifting line” donde la dimensión se determina con los datos polares de los perfiles aerodinámicos (Islam et al., 2008), esta aplicación de la metodología en Qblade está basada en la investigación de van Garrel (Van, 2003), donde se asegura que el mencionado método tiene mejores resultados en cuanto a precisión, comparado con los métodos basados en “Blade element momentum”.
En el método QLLT el campo de velocidad se determina a partir de la influencia de vórtices en la estela de los álabes (Islam et al., 2008). La velocidad del viento en un punto determinado ecuación (3) se calcula a partir de la velocidad del flujo de viento sin perturbación más la velocidad inducida por los filamentos de vórtice, la cual, para un punto p se tiene:
Donde d representa la distancia del punto p al filamento de vórtice y
A pesar de que ambos métodos son considerados de bajo tiempo de cómputo en comparación con el análisis de la dinámica de fluidos computacional CFD, una comparación entre ambos permite definirlos de una forma más específica como bajo y mediano tiempo de cómputo. Por ejemplo, el método DMS para cualquier análisis realizado en el presente trabajo no rebasa un minuto de duración para la simulación, por otro lado, el tiempo de cómputo total para un análisis con el método QLLT con un rotor de 3 álabes y 15 paneles (secciones que forman cada álabe) es de aproximadamente 30 minutos. La diferencia en tiempo es aún mayor al considerar que el análisis DMS permite obtener la curva del coeficiente de potencia (Cp) vs relación de velocidad específica (TSR) completa, mientras que el método QLLT solo arroja un punto de dicha curva en cada análisis, por lo cual su tiempo de cómputo total para la caracterización de un rotor debe ser multiplicado por tantos puntos se deseen en la curva para obtener un tiempo estimado de cálculo computacional.
Rotor Darrieus tipo Phi, Sandia National Laboratories
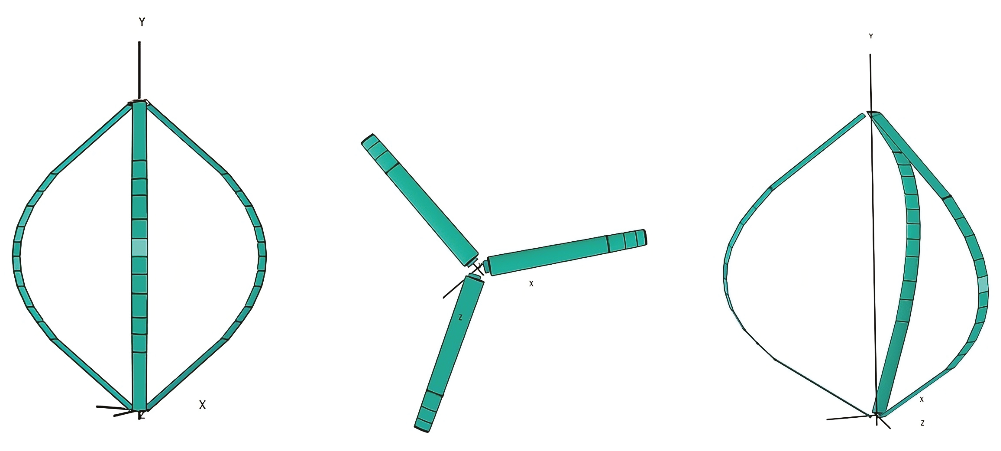
El análisis con el método QLLT, así como la configuración óptima de la simulación se llevó a cabo al analizar el rotor tipo Phi de tres alabes, diseñado en los laboratorios Sandia en Albuquerque, Nuevo México (Blackwell et al., 1976; Sheldahl, 1981) estudiado de forma experimental en el túnel de viento de baja velocidad de la corporación aeroespacial LTV de 4.6 x 6.1 m (Blackwell & Sheldahl, 1977) (Figura 3).
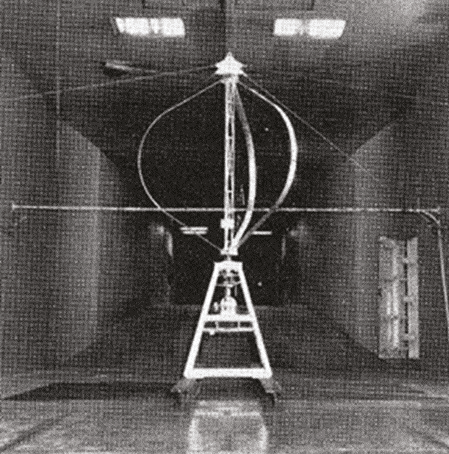
El desarrollo fue impulsado por la agencia (Energy Research and Development Administration, ERDA) del gobierno estadounidense. A partir de los experimentos se generó un reporte técnico publicado en 1976 (Blackwell et al., 1976). Los álabes del aerogenerador fueron fabricados utilizando el perfil aerodinámico NACA 0012, el cual es un perfil simétrico ampliamente estudiado en la industria aeronáutica y, dada la gran cantidad de información disponible del mismo, utilizado en el diseño de VAWTs; en la Tabla 1 se presentan las características del rotor estudiado. Debido a sus dimensiones el VAWT fue caracterizado a escala real, lo cual evita problemas de similitud debidos al escalamiento presentados en el estudio de VAWTs de mayor dimensión (Miller et al., 2021). Por otro lado, los autores realizaron pruebas de campo con el mismo rotor y determinaron que las mediciones experimentales en túnel de viento tienen el grado suficiente de correlación para ser utilizadas como referencia (Sheldahl, 1981).
Tabla 1 Características del rotor Darrieus tipo Phi (Blackwell et al., 1976)
| Altura | 2 m |
| R max | 0.9798 m |
| Perfil aerodinámico | NACA012 |
| Solidez | 30.00 % |
| Número de álabes | 3 |
| Vel. viento | variable |
| Cuerda | 8.815 cm |
| Vel. rotor | 180-267 rpm |
Perfil aerodinámico y polares
La generación de la geometría comienza con el perfil aerodinámico, dado que se utiliza un perfil NACA resulta sencilla la obtención de las coordenadas, ya que el software permite generar las coordenadas de forma automática. Se utilizaron 200 puntos para definir el contorno del perfil, las polares fueron generadas para número de Reynolds (Re) de entre 40,000 y 400,000, valores con los cuales es posible interpolar el resto de los valores requeridos. Es importante mencionar que el Re sobre las aspas, cuando el aerogenerador está rotando, varía constantemente y depende de la relación de velocidad de la punta del álabe. Para el cálculo con XFoil se utilizó un Ncrit igual a 9, para un rango de ángulos de ataque de -10 ° a 20°. Dichas polares fueron extrapoladas utilizando el método Montgomerie. El parámetro Ncrit, está relacionado directamente con la formulación del fenómeno de transición (de laminar a turbulento) del código de XFoil. Este parámetro puede emplear valores de 10-12 para un túnel sin impurezas, un valor de 9 para túneles estándares, de 4-8 para túneles que presenten mayores impurezas (sucios).
En la Figura 4 se presentan las polares de sustentación (Cl) obtenidas con XFoil y extrapoladas para el rango de -10° a 20° (AoA) mediante el método Montgomerie, de igual forma se presentan datos de polares del mismo perfil evaluados de forma experimental en número de Reynolds similar para su comparación.
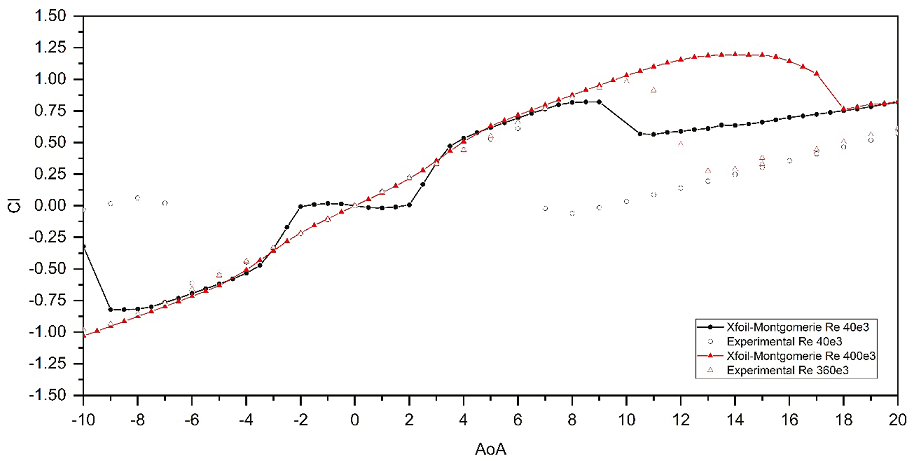
Figura 4 Comparación del coeficiente de sustentación (Cl) generado y datos experimentales para perfil NACA 0012
En la Figura 5 se presenta el coeficiente de arrastre obtenido con XFoil, así como datos experimentales para su comparación.
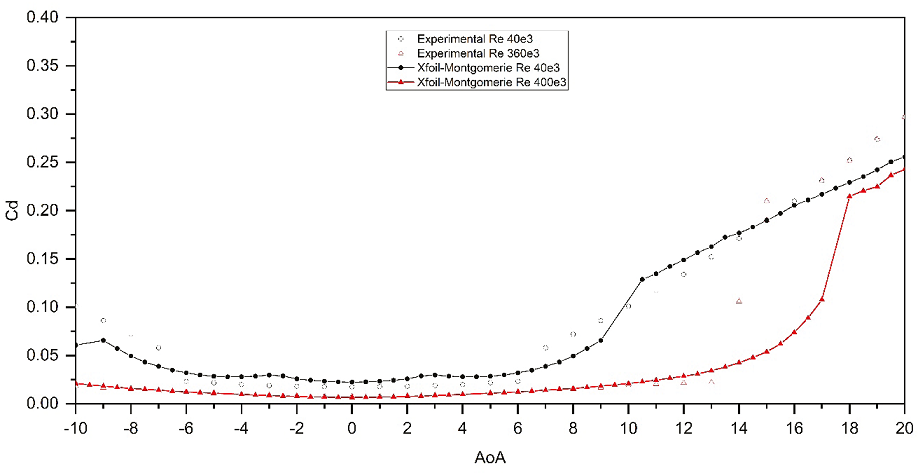
Figura 5 Comparación del coeficiente de arrastre (Cd) generado y datos experimentales para perfil NACA 0012
La diferencia entre los valores experimentales y numéricos puede tener una gran variedad de causas. En primer lugar, los valores de número de Reynolds para los que se calculan las polares son muy bajos, lo cual, podría ocasionar inconsistencias en la estimación de los valores de las polares por causa de las limitaciones propias del software XFoil. Dicho software ha sido reportado como óptimo para la determinación de las polares en condiciones de bajo número de Reynolds (2.0x105) (Morgado et al., 2016), sin embargo, dicho régimen es superior al utilizado para el estudio actual. En segundo lugar, el perfil utilizado fue diseñado para operar idealmente en condiciones de número de Reynolds mucho mayores por lo que su desempeño en un régimen inferior puede verse severamente afectado y, por lo tanto, ser más complicada su definición precisa de forma computacional. Por otro lado, también debe considerarse que los datos experimentales fueron obtenidos con las limitaciones propias de su época (Sheldahl & Klimas, 1961).
Reconstrucción de la geometría Sandia
La geometría curva del álabe fue simplificada al aproximarla mediante dos segmentos rectos en los bordes y un arco de circulo al centro, dicha geometría permite obtener la resistencia estructural propia de la geometría original, pero con mayor facilidad de fabricación. En la Figura 3 se muestra la geometría del rotor tipo Phi. La geometría del rotor fue reconstruida en Qblade tal como se describe en el reporte técnico de Sandia, con la excepción del arco de circulo, el cual fue aproximado mediante segmentos de línea recta. Dado que el método QLLT también hace una discretización del álabe según el número de paneles seleccionado (número de segmentos que forman el álabe), esta implementación no representa un serio inconveniente en la simulación.
En la Figura 6 se muestra la geometría del rotor, así como las coordenadas de las secciones para su construcción en el software.
La Tabla 2 muestra los parámetros para el diseño del aerogenerador que se introdujeron al software QBlade para la generación del aerogenerador mostrado en la Figura 6. El Offset Eje es la distancia que hay entre el eje de rotación y el radio del álabe (de cada sección).
Tabla 2 Parámetros de diseño del aerogenerador de eje vertical tipo Phi
| Altura, m | Cuerda, m | Radio, m | Perfil | Offset Eje | |
| 0.0000 | 0.08815 | 0.0500 | NACA | 12 | 0.5 |
| 0.4350 | 0.08815 | 0.6733 | NACA | 12 | 0.5 |
| 0.5500 | 0.08815 | 0.7850 | NACA | 12 | 0.5 |
| 0.6500 | 0.08815 | 0.8710 | NACA | 12 | 0.5 |
| 0.7910 | 0.08815 | 0.9500 | NACA | 12 | 0.5 |
| 0.9000 | 0.08815 | 0.9820 | NACA | 12 | 0.5 |
| 1.0000 | 0.08815 | 0.9900 | NACA | 12 | 0.5 |
| 1.1000 | 0.08815 | 0.9820 | NACA | 12 | 0.5 |
| 1.2090 | 0.08815 | 0.9500 | NACA | 12 | 0.5 |
| 1.3500 | 0.08815 | 0.8710 | NACA | 12 | 0.5 |
| 1.4500 | 0.08815 | 0.7850 | NACA | 12 | 0.5 |
| 1.5650 | 0.08815 | 0.6733 | NACA | 12 | 0.5 |
| 2.0000 | 0.08815 | 0.0500 | NACA | 12 | 0.5 |
Simulación DMS
El método DMS ofrece pocas opciones de configuración, y por defecto, ya se encuentra configurado con parámetros recomendados, estos son densidad del aire de 1.225 kg/m3; viscosidad del aire de 1.647 × 10−5 Pa*s; número de elementos de malla del álabe, 40; iteraciones máximas, 100; valor epsilon de convergencia, 0.001 y factor de relajación de 0.35.
Simulación QLLT
Para la configuración de la simulación QLLT se requiere la definición de una mayor cantidad de parámetros, entre ellos el vortex time offset (Sc) y el turbulent vortex viscosity (δv) que tienen un efecto predominante, ya que definen el tamaño inicial del vortex core radius y su desarrollo a través del tiempo, ver Figura 7 (Marten & Wendler, Qblade guidelines, Ver. 0.6, 2013). El vortex core radius determina el comportamiento de la estela, ya que afecta la forma en que se modela la estela del viento generada por el VAWT.
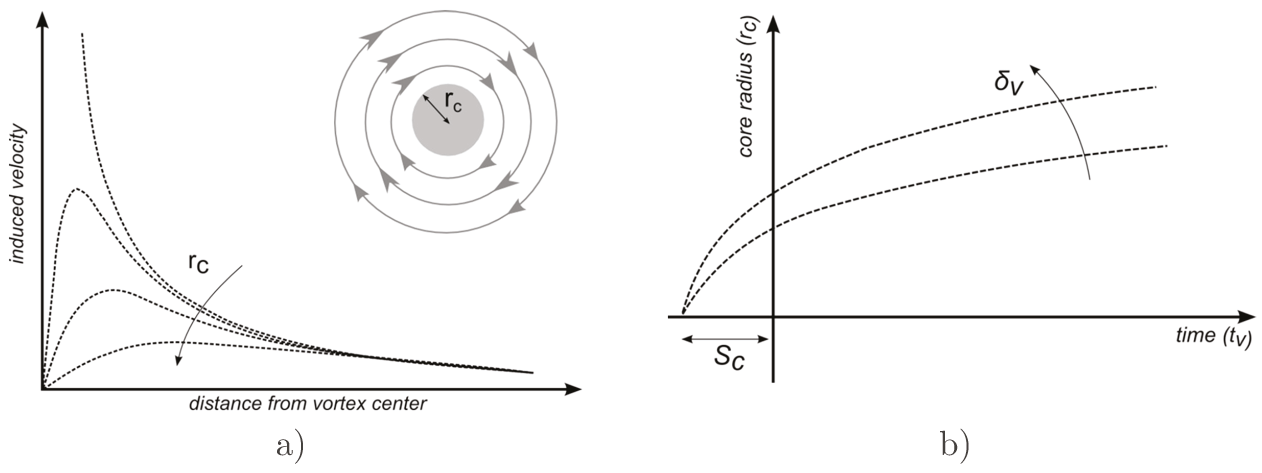
Figura 7 a) Influencia de rc en la velocidad inducida; b) influencia de Sc y δv en rc (Marten & Wendler, Qblade guidelines, Ver. 0.6, 2013)
En la actualidad, no existe un método para la determinación de dichos parámetros por lo que deben ser propuestos de forma empírica, los valores utilizados en el presente trabajo y mostrados en la Tabla 3 se obtuvieron mediante pruebas previas en el rotor. Donde la posición azimutal define la posición del álabe 1, respecto al origen (0°); el Timestep es la cantidad de pasos en una revolución del rotor; las revoluciones del rotor definen el número total de revoluciones que completará el rotor durante la simulación. Delta azimutal define el tamaño de paso de tiempo en términos de pasos azimutales; si se activa Efecto del suelo, la simulación se realiza considerando el efecto del suelo en el campo de velocidad del viento; al activar la opción Sombra de la torre, el programa utiliza un modelo matemático para considerar el efecto de “sombra” generado por el eje del VAWT al obstruir el flujo del viento; el parámetro Máxima longitud de estela, permite definir el momento en el cual un vórtice es removido de la simulación con la finalidad de disminuir el costo computacional; Estela completa permite definir el punto a partir del cual los vórtices que componen la estela son simplificados; Vortex time offset y Turbulent vortex viscosity permiten ajustar el modelado del núcleo del vórtice. Al activar Unsteady aerodynamics los cálculos se realizan al considerar la descomposición de polares.
Tabla 3 Configuración método QLLT en QBlade
| Posición azimutal álabe 1 | 270° |
| Timesteps | 360 |
| Revoluciones del motor | 10 |
| Delta azimutal0 | 10° |
| Efecto del suelo | Desactivado |
| Sombra de torre | Activado |
| Máxima longitud de estela | 9 rev |
| Estela completa | 1 rev |
| Vortex time step | 40 |
| Turbulent vortex viscosity | 500 |
| Unsteady aerodynamics | Desactivado |
Resultados
En la Figura 8 se presentan las curvas del coeficiente de potencia en función del TSR obtenido mediante el método DMS y QLLT, así como los datos obtenidos mediante prueba experimental para la configuración a 180 RPM. El coeficiente de potencia máximo alcanzado en las pruebas experimentales es de 0.27 para un TSR de 4.5. El método DMS arroja un coeficiente de potencia máximo aproximado de 0.26 para un TSR de 4.75 por lo que la gráfica muestra un corrimiento hacia la derecha. Para TSR entre 1 y 3 el método DMS sobreestima el coeficiente de potencia. Los datos experimentales muestran el comienzo del aumento del coeficiente de potencia en valores de TSR entre 2-2.5. Por otro lado, el método DMS arroja valores de Cp de 0.02 para el mismo intervalo de TSR. Dado que nunca se busca que el aerogenerador opere en dicho rango de la curva la discrepancia en esa zona es permisible. Para TSR entre 3 y 4.5 la curva tiene un incremento constante, el método DMS estima dicho comportamiento de forma adecuada, pero subdimensiona los valores.
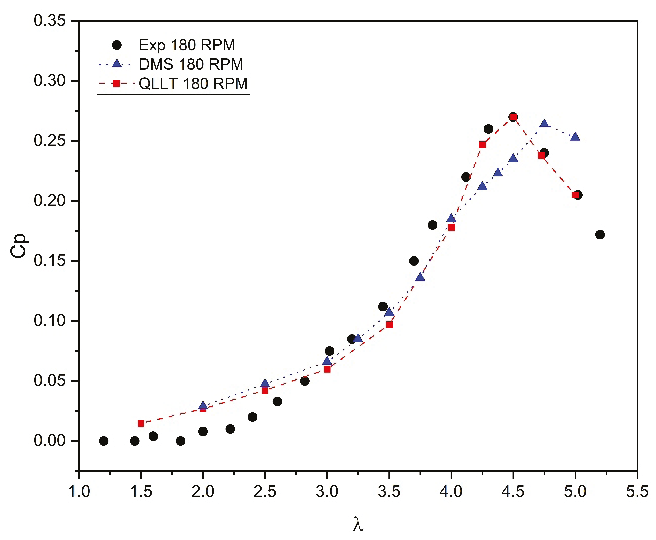
El método QLLT muestra una mejor correlación con los resultados experimentales, sin embargo, para el rango de TSR entre 1 y 3 también se aprecia una sobreestimación del coeficiente de potencia dado que ambos modelos muestran el mismo comportamiento, este puede ser atribuido a las polares utilizadas. Para el rango entre 3 y 4.5 el método QLLT estima de forma adecuada el desempeño del rotor en especial en el rango 4-4.5, en donde a diferencia del método DMS acierta en el valor de Cp máximo para un TSR de 4.5. El TSR se define como la relación entre la velocidad en la punta del rotor con la velocidad del flujo libre y se expresa como en la ecuación (4):
Dado que la velocidad de flujo libre es constante para todas las pruebas realizadas en el presente trabajo, la variación de λ se realiza con el cambio de la velocidad angular del rotor, de tal forma que a mayor velocidad angular el TSR será mayor. Dicha configuración genera que el número de Reynolds varie entre cada punto de estudio de la curva, dicho efecto tiene mayor predominancia en las pruebas a velocidad de viento constante, dato que la velocidad de rotación debe ser modificada y esta tiene un mayor impacto en la definición del Reynolds local del álabe. El número de Reynolds local para VAWTs se define en la ecuación (5):
En donde W es la velocidad relativa percibida por el perfil aerodinámico, c es la longitud de la cuerda y ν es la viscosidad cinemática. La velocidad relativa se define en la ecuación (6):
donde U(1-a) es la velocidad del viento reducida por el factor de interferenciaa. Analizando las ecuaciones es posible afirmar que el aumento de la velocidad de rotación aumenta el TSR y el Reynolds, por lo tanto, en valores bajos de TSR se tendrán los valores más bajos de Reynolds, este efecto tiene mayor impacto en pruebas a velocidad de viento constante.
En la Figura 9 se presentan los resultados del análisis realizado a velocidad angular constante (267 RPM), en esa prueba la velocidad de rotación del aerogenerador se modifica para obtener el TSR deseado, difiere en las pruebas a velocidad de rotación constante en que Reynolds varia de forma mayor, dado el mayor impacto de la velocidad de rotación en la determinación de este.
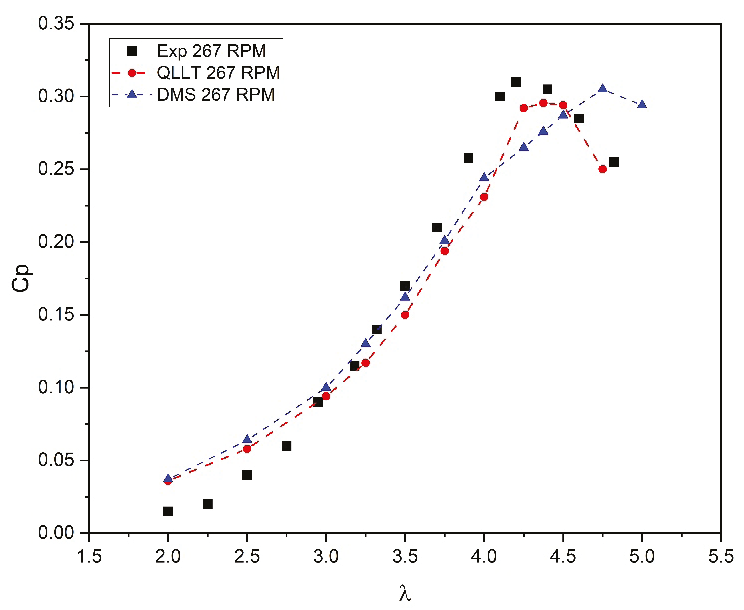
En cuanto a las tendencias de predicción de los modelos estudiados, el método DMS se ajusta de forma adecuada a la curva en la zona de TSR entre 0 y 2, entre 2 y 5 la curva se ubica por debajo de la curva de datos experimentales por lo que el método DMS subdimensiona el desempeño del rotor, finalmente para el intervalo comprendido entre 5 y 8 el método DMS sobreestima el valor de Cp.
El método QLLT parece ajustar de una mejor forma el comportamiento de la curva de datos experimentales.
Para el intervalo comprendido de 0 a 2 se observa una ligera sobreestimación, entre 2 y 4.5 los valores obtenidos son inferiores a los valores experimentales, finalmente en el intervalo de valores superiores a 4.5 el método QLLT también sobreestima el coeficiente de potencia.
La sobreestimación del coeficiente de potencia en valores de TSR superiores al Cp máximo puede atribuirse en primer lugar a la diferencia de las polares utilizadas y los datos experimentales, dado que en la zona de la curva estudiada se presentan relativamente bajos ángulos de ataque, las variaciones en los coeficientes de sustentación y arrastre tienen una mayor importancia.
En la Figura 10 se muestra la evaluación realizada con una velocidad de viento constante igual a 11 m/s. Dicha configuración de análisis requiere la variación de la velocidad de rotación del rotor para ajustar el valor de TSR deseado. Debido a que en condiciones normales de operación los VAWTs siempre trabajan en valores de TSR superiores a la unidad, la componente de la velocidad percibida por los alabes que tiene predominancia es la velocidad de rotación. Por lo tanto, para las pruebas a velocidad de viento constante el Reynolds aumenta de forma proporcional al TSR (Blackwell et al., 1976). De esta forma, la gráfica nos permite analizar la tendencia de comportamiento en la predicción de los métodos estudiados para un rango más amplio del Reynolds en comparación con los análisis con velocidad de rotación constante en donde el Reynolds tiene un comportamiento con menor variación. Para el rango de TSR comprendido entre 0.5 y 2.5 el método DMS subestima el coeficiente de potencia, por otro lado, el método QLLT tiene una tendencia opuesta al sobre estimar el coeficiente de potencia, siendo que el método DMS se ajusta mejor a la curva experimental para esta zona. Para el rango de TSR comprendido entre 2.5 y 4 ambos métodos subestiman el coeficiente de potencia. Es en este rango en donde el método QLLT tiene un mejor ajuste con la curva experimental.
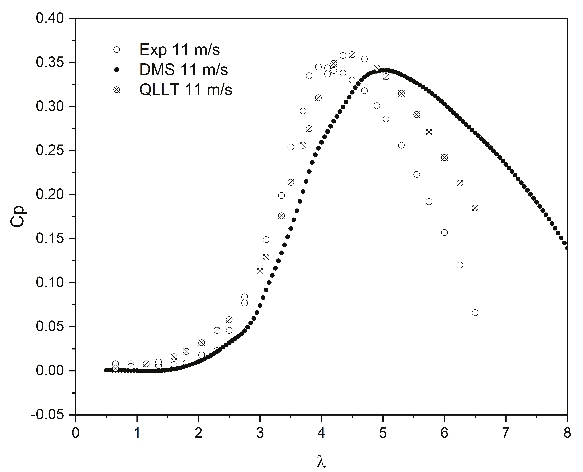
En cuanto a la determinación del coeficiente de potencia máximo con el método DMS se obtiene un Cp max = 0.34 en un TSR igual a 5. Con el método QLLT se obtiene un Cp max = 0.359 en un TSR igual a 4.5. Dado que el valor experimental es Cp max = 0.345 en un TSR igual a 4 es posible afirmar que ambos métodos permiten obtener un valor de coeficiente de potencia aceptable sin embargo el método QLLT estima de mejor forma el rango del TSR para el Cp max.
En la Figura 11 se muestra el error entre los valores estimados por los métodos DMS y QTTL con referencia a los datos experimentales. El signo negativo en el error implica que el método está subestimando con referencia al valor experimental para el mismo TSR, por otro lado, cuando el error es positivo el método está sobrestimando al valor experimental para el mismo TSR. Para el caso de valores de TSR superiores a TSR (Cp max) el error tiende a aumentar (sobreestimación) hasta alcanzar el error máximo para el mayor de TSR evaluado de 6.5.
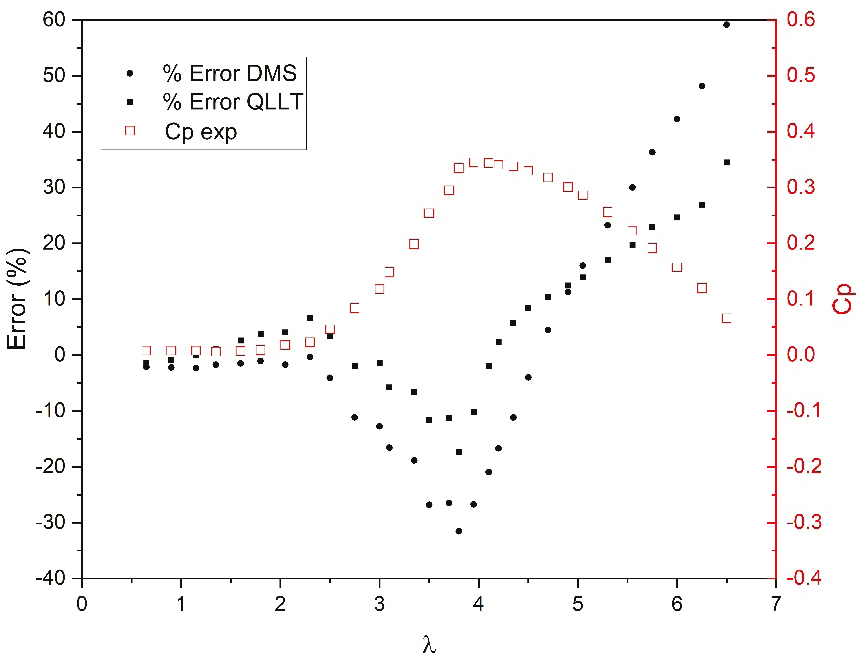
En el caso del Método DMS el error máximo es de poco más de 59 %, por otro lado, para el método QLLT el error máximo obtenido es de poco más de 34 %, sin embargo, dicha zona de la gráfica es reportada en pocas ocasiones, dado que no es la zona de operación deseada para un VAWT. Por otro lado, Blackwell et al. (1976) advierten que el método DMS tal como está implementado en Qblade no ofrece resultados confiables en dicha zona.
Si se considera como límite el valor experimental de Cp max el error promedio del método QLLT es de 11.05 % y el del método QLLT de 5.32 % y los errores máximos de 31.53 % y 17.39 %, respectivamente. En vista de tales resultados, el método QLLT resulta una mejor opción para la estimación del coeficiente de potencia de un VAWT, sin embargo al considerar el tiempo de cómputo el método DMS es adecuado para las primeras etapas de diseño.
Conclusiones
En el presente trabajo se muestra el análisis de un rotor Darrieus tipo Phi para aerogenerador que puede funcionar en regiones con velocidad de viento promedio anual cercana a 10 m/s. Se utilizaron los métodos QLLT y DMS para analizar el coeficiente de potencia y velocidad específica, con los cuales se logró la comparación con datos experimentales reportados en la literatura y con ello la validación de la propuesta.
El método QLLT permite obtener resultados con mayor correlación a los datos experimentales, en particular para el caso de estudio de este trabajo la diferencia en el error máximo absoluto es de casi 25 %. Se obtuvieron los parámetros adecuados para la configuración de los métodos DMS y QLLT para el modelado de VAWT de baja potencia, en especial, se determinaron valores de Sc y δν que modelan el desarrollo de la estela.
Como trabajos futuros a partir de la presente investigación se considera un análisis estructural de las piezas y los materiales, así mismo la selección de generador eléctrico y el circuito de acondicionamiento de potencia y con ello una valoración de la eficiencia del sistema, así como un análisis costo beneficio para la viabilidad.
Finalmente, el software utilizado para el análisis del VAWT tiene actualizaciones constantes, y en la actualidad cuenta con un módulo para modelado de los brazos de soporte de los álabes, así como un mayor grado de opciones de configuración para el modelado de los vórtices que permiten definir el campo vectorial, lo cual puede ser aprovechado en trabajos futuros para una mejor configuración de la simulación.

