APÉNDICE A
Ejemplo de una elipse con centro en (50,25) y semiejes a = 375 y b = 325
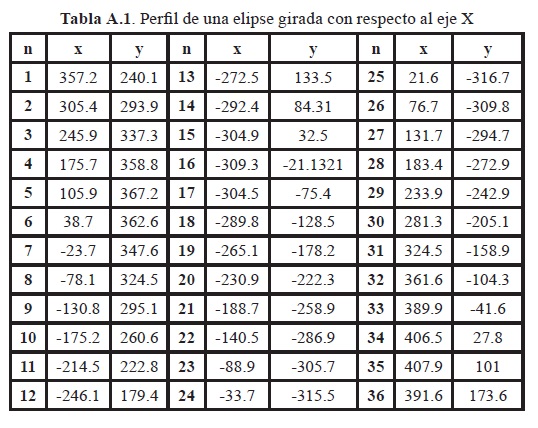
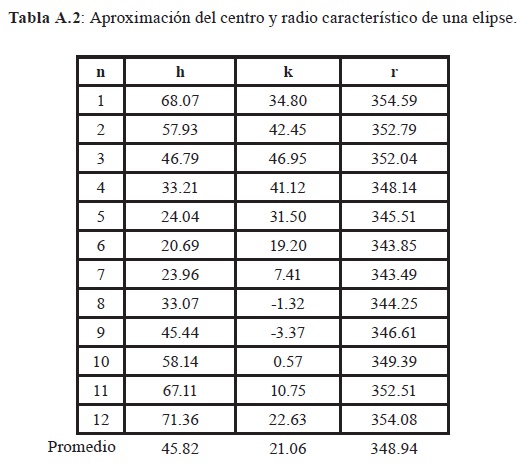
Sea el caso general de una elipse con centro en (50, 25) y semiejes a = 375 y b = 325, los cuales presentan un ángulo Φ = 35° con respecto al eje X, como se muestra en la Figura 2b. En la tabla A.1 se presentan 36 puntos alrededor del perfil elíptico, discretizados como se muestra en la Figura 2a; en la tabla A.2 se muestran los resultados obtenidos para 12 triadas a partir de los 36 puntos, y finalmente en la tabla A.3 se presenta un resumen de los resultados obtenidos. Cada resultado de la tabla A.3 se obtuvo a partir de tres puntos de la tabla A.2 con el siguiente esquema:
Punto 1: 1 + i
Punto 2: 13 + i
Punto 3: 25 + i
donde i = 0, 1,2, ... 12
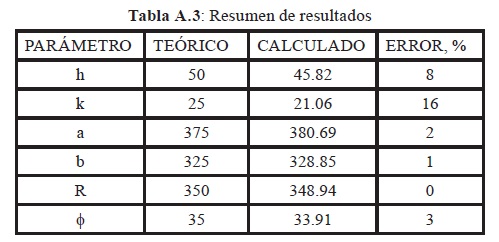
Para el caso general de la elipse se observa que el error aumenta, por lo tanto es necesario usar un método más preciso. Una posible solución es detectar la orientación de los ejes de forma experimental y a partir de esto realizar las mediciones del contorno de la pieza, tomando en consideración la rotación de ejes.
APÉNDICE B
Jacobiano
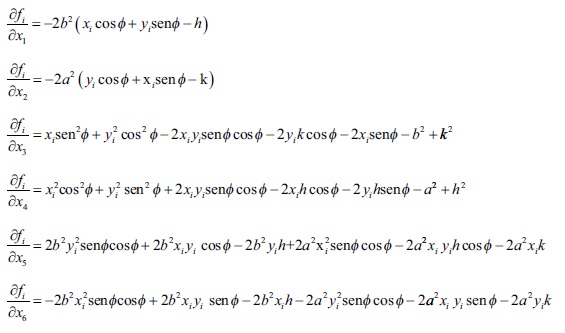
Ejemplo 1: Cálculo de las coordenadas del centro de un perfil elíptico por el método de Newton-Raphson [11],
Retomando el caso general de una elipse con centro en (50, 25) y semiejes a = 375 y b = 325, con un ángulo de rotación Φ = 35° con respecto al eje X, se toman seis puntos del Tabla A.1 para los valores de xi y yi, i = 1, 2, ...,6. Para este caso, los puntos seleccionados fueron: n = 1, 3, 5, 7, 9 y 12.
Para construir la solución x* ≠ 0, tal que f(x*) = 0, se toma la siguiente condición inicial:
x0 = {0,0,0,0,0,0}T.
La solución se encontrará por medio de un algoritmo recursivo y se determinará el número de iteraciones y precisión alcanzada para evaluar si el método no lineal es más confiable que el método lineal.
APÉNDICE C
El dispositivo para la medición de concentricidad del componente consiste en una estructura metálica fabricada en acero de medio carbono, en la cual se encuentra montado un servomotor de 0.14 kW 5000 rpm 0.325 N-m con encoder absoluto multi-turn de 17 bits 131,072 cuentas/revolución, modelo TLYA130PBJ62AA marca Allen Bradley, al cual se encuentra acoplado un reductor de velocidad tipo planetario de relación 50:1, modelo LP050-M02-50-111 marca WITTENSTEIN ALPHA. El servomotor hace girar una flecha sobre la cual se encuentra montado un transductor de posición de tipo inductivo. Un mecanismo de elevación de accionamiento neumático sube el componente hasta una altura conveniente en la cual se realiza la medición. La flecha, a su vez, sirve de guía para el centrado del componente, ya que la punta se aloja en el orificio del rodamiento de la carcasa, de manera que el transductor de posición puede medir la distancia de la masa con respecto al centro de la carcasa; como se describe en la Figura 3b. El control de movimiento del servomotor y la lectura de datos del transductor se realizan por medio de una computadora industrial tipo Panel, Pantalla LCD TFT de 12.1", Protección frontal NEMA 4/12 (IP65), resolución de 800 X 600, procesador Core 2 Duo @ 2.4 Ghz, 2 MB de memoria cache modelo P1121-841 marca Axiomtek, y una tarjeta de adquisición de datos multifunción serie M, 16 entradas analógicas de voltaje, resolución 16 bits, velocidad de muestreo 250kS/s, rango de voltaje -10 V a 10 V, 24 entradas/salidas digitales modelo PCI-6220 marca National Instruments.