
Sistema experimental para el estudio de microdeformaciones mecánicas mediante anisotropía óptica inducida
a,bCarlos H. Saucedo-Zárate, cMáximo López-López, bCarlos Sánchez-López, ªJorge A. Huerta-Ruelas
ªCentro de Investigación en Ciencia Aplicada y Tecnología Avanzada unidad Querétaro IPN Cerro Blanco 141, Querétaro, Qro. México 76090
bInstituto Tecnológico de Aguascalientes, Departamento de Metal-Mecánica Av. Adolfo López Mateos 1801 Ote., Aguascalientes, Ags. México 20256
cDepartamento de Física, Centro de Investigación y de Estudios Avanzados del IPN, Apartado Postal 14-740, México, D. F. 07000
]]>Fecha de recepción: 08-04-10
Fecha de aceptación: 31-06-10
Abstract
Currently there is a scientific and technological interest to evaluate by a non-destructive and non-invasive method the mechanical performance of materials. In this paper we present the development of a multi-functional experimental setup to obtain the strain/stress state in a variety of materials such as, semiconductor heterostructures, composite materials, alloys, among others. The main purpose is to characterize strain/stress state of materials in elastic range, employing reflectance-anisotropy laser (RAL) measurements and strain gages. The system presented is able to obtain traditional strain gages measurements simultaneously with RAL signals in specimens strained with a micrometric computer control. A NI™ platform is used for signal conditioning and processing. The system is composed of an optical setup with a photoelastic modulator as a central device to measure the RAL signal, and a flexor which applies a deformation in a specimen by means of a micrometer. A correlation value 0.99 was found between the RAL optical signal and the strain gages measurements.
From our results a new contact-less procedure was established to measure the microscopic strain behavior with high accuracy. The experimental setup can be employed in traditional metallic materials, composite materials, or new semiconductor heterostructures, where strain gages are difficult, if not impossible to apply.
Key words: Reflectance anisotropy, extensometry, optic anisotropy, elastic strain, silicon (110).
Resumen
]]> Existe en la actualidad un interés tanto científico como tecnológico en evaluar el desempeño mecánico de materiales por medios no invasivos y no destructivos. En este artículo presentamos el desarrollo de un arreglo experimental multifuncional para obtener el estado de esfuerzo/deformación en diversos materiales, tales como; heteroestructuras semiconductoras, materiales compuestos, aleaciones, entre otros. El propósito principal es la caracterización del estado esfuerzo/deformación de materiales dentro del régimen elástico, a través de mediciones de reflectando anisotrópica láser (RAL) y de galgas extensométricas. El sistema presentado aquí, es capaz de obtener mediciones tradicionales a través de galgas extensométricas, simultáneamente con señales de RAL, en probetas deformadas micrométricamente mediante un control computarizado. Se utilizó una plataforma de NI™ para el acondicionamiento y procesamiento de señal. El sistema está compuesto de un arreglo óptico que posee un modulador fotoelástico como dispositivo central para la medición de RAL, y de un dispositivo flexor que aplica una deformación a la muestra por medio de un micrómetro. Se encontró una correlación de 0.99 entre la señal óptica RAL y las mediciones de la galga extensométrica. A partir de nuestros resultados, se establece un nuevo procedimiento de no contacto de alta precisión para la medición de micro-deformaciones. Este sistema puede emplearse en materiales metálicos tradicionales o materiales compuestos, incluyendo nuevas heteroestructuras semiconductoras, donde las galgas extensométricas son difíciles, si no imposible, de aplicar.Palabras clave: Reflectancia anisotrópica, extensometría, anisotropía óptica, deformación elástica, silicio (110).
Introducción
A mediados de los ochentas, se incrementó la actividad de investigación sobre la naturaleza elástica que presentan los sistemas mecánicos, entre ellos los llamados mecanismos dóciles (en Ingles: compliant mechanism) y en especial eslabones y articulaciones usados en robots. (Chang, 1985) (McInroy, 1990), (Mayer, 1994), (Arteaga, 1998), (De León-Morales, 2001), (Meggiolaro, 2005), (Kumar, 2006), (Beasley, 2009). Feliu en su revisión señala; El robot flexible aparece como un área de oportunidad que está siendo abordada multidisciplinariamente a nivel mundial, donde los sensores y su instrumentación, juegan un papel importante. Ver Figura 1.
Los robots experimentales más flexibles son fabricados en otros materiales tales como los compositos reemplazando los eslabones tradicionalmente metálicos, de aquí la necesidad de desarrollo y caracterización de nuevos materiales para estas aplicaciones (Feliu, 2006).
En forma análoga a la utilización de nueva instrumentación basada en técnicas ópticas, como lo ha sido la medición de temperatura, de vibración y de rugosidad sin contacto, se plantea aquí una propuesta experimental para la detección de microdeformaciones mecánicas. En este arreglo experimental se hace uso de la técnica óptica conocida como Reflectancia Diferencial/Anisotrópica (RD/RA) y se plantea la posibilidad de utilizar una instrumentación capaz de medir cambios en la anisotropía óptica de un monocristal de Silicio (1 10), inducidos por un espécimen en estado de deformación.
]]> La espectroscopia de reflexión anisotrópica (RAS) mide la diferencia de reflectancia (Δr) entre dos direcciones ortogonales en el plano de la superficie (x, y) dividida entre la reflectancia media r, de un haz de luz linealmente polarizado incidiendo normalmente sobre la superficie de una muestra cúbica (Aspnes, 1985), (Weightman, 2005):
Donde las reflectancias r corresponden a las amplitudes de reflexión complejas de Fresnel. Ver figura 2.
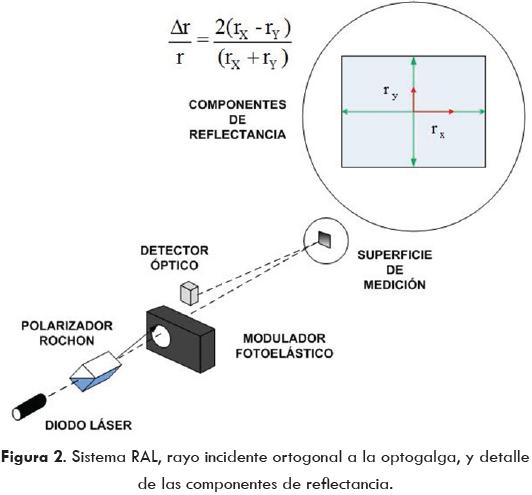
RAS es una prueba óptica de no contacto y no destructiva que es capaz de operar en una gran variedad de ambientes, sus orígenes por Aspnes y colaboradores datan de los ochentas como prueba de superficies y crecimiento de semiconductores (Weightman, 2005). En las primeras publicaciones se refieren a la técnica como espectroscopia por reflectancia diferencial (RDS). Posteriormente se aplicó el termino RAS a la técnica para distinguirla de otros métodos similares. Se publicó una comunicación rápida (Cole, 2003), donde los autores muestran a RAS como una sonda de no contacto que podría ser útil para estudiar el régimen plástico (fluencia) en materiales metálicos policristalinos (Blackford, 2005).
En otros estudios puede observarse que RAS pudo detectar cambios tan pequeños como los debidos a la evolución de la oxidación de la superficie (Huerta, 1995). El estado del arte revela que RAS es ideal para medir pequeñas anisotropías ópticas en general, y no solamente las derivadas de la superficie (Cole, 2003), siendo además una técnica altamente sensible (Weightman, 2005), (Blackford, 2005), (Papadimitriou, 2005). La interpretación del espectro RAS de las superficies cristalinas no es sencilla, depende de la función dieléctrica compleja tanto de la región de superficie como del volumen, es una cantidad difícil de calcular en términos de primeros principios incluso para el volumen de un sólido cristalino. (Weightman, 2005), (Rönnow, 1999).
Papadimitriou utilizó RAS sobre diferentes planos de monocristales de Silicio. En su publicación se observa en particular que el plano (110) presenta niveles de respuesta relativamente mayores que el plano (111) (Papadimitriou, 2005). Este autor realizó su estudio con un barrido de 1 a 6 eV mediante un Monocromador (Espectroscopía típica). También observamos en su trabajo que la región energética entre los 2 y 2.5 eV del cristal de Silicio (110) presenta una clara separación estratificada de niveles de señal dependiendo del esfuerzo aplicado. De aquí que una fuente de luz monocromática cercana a esa energía sería suficiente para llevar a cabo el experimento. Se sustituyó entonces el Monocromador, elemento típico de RAS, por un pequeño diodo láser, teniéndose entonces la reflectancia anisotrópica a una longitud de onda laser fija (RAL). Ver figura 3.
]]>
Los materiales cúbicos, tales como el Silicio, son conocidos como ópticamente isotrópicos. Entonces si la simetría es alterada por una fuerza externa esto podría producir una anisotropía, la cual podría ser detectada por RAS (Papadimitriou, 2005). Esto indujo la idea del uso de un cristal semiconductor de forma análoga a una galga extensométrica (Vishay™, 2002), (Dally, 1993). De manera que las deformaciones superficiales de un espécimen (probeta) sometido a deformación controlada, se transmitan al cristal adherido a la superficie. Luego, mediante los cambios de simetría cristalina detectados por técnica RAL, se midieran indirectamente las deformaciones presentes en la superficie de la probeta.
El problema de cómo deformar el cristal de una manera controlada y al mismo tiempo tener una referencia cuantificable del fenómeno de deformación, se resolvió integrando un dispositivo flexor Vishay™ y un equipo de extensometría NI™ al sistema óptico de RAL.
Desarrollo
a) Montaje experimental
Se diseñó y construyó un Banco Experimental de Esfuerzos y Caracterización de Materiales (Saucedo, 2006), (Saucedo, 2007) (Saucedo, 2009), el cual cuenta con un subsistema óptico experimental que utiliza luz Láser (RAL), donde se implementó un experimento para probar las capacidades del cristal de Silicio como transductor óptico de deformación. El arreglo experimental se montó a partir del siguiente equipo: En una mesa óptica de suspensión de gas se montaron los soportes para los dispositivos ópticos involucrados; Fuente Newport™ 5005, un diodo láser rojo (635nm), polarizador tipo Rochon, un modulador fotoelástico con control PM-100 Hinds™, un amplificador sensible a la fase (Lock-in) Stanford Research™ modelo SR830, Galga extensométrica Omega™, tarjeta de adquisición de datos PCI6025E NI™, unidad de acondicionamiento SC-2345 NI™ con módulos SCC-SG02/03 NI™, Flexor Vishay™ y un fotodetector con amplificador operacional TL-071 para medir la intensidad del haz de luz reflejado. Ver Figura 4.

b) Método de medición:
La preparación del cristal usado como transductor, implica el uso de muestras en forma de oblea, las cuales se cortan apretando con una punta la oblea, y tratando que la dirección del corte coincida con uno de los ejes principales del cristal (esto no siempre es posible para todas las superficies). El resultado de estos cortes se muestra en la Figura 5.

Utilizando un dispositivo fabricado en teflón especialmente concebido para ello (ver Figura 6), el diseño experimental incluye ataque químico previo con acido Fluorhídrico (HF) sobre superficies de los cristales de Si. Esto se realiza con el fin de eliminar impurezas en la superficie del cristal incluyendo los óxidos naturales. Dependiendo del estado de la muestra, es práctica común en estudios de RAS realizar una limpieza con Metanol, el objetivo es remover impurezas orgánicas en la superficie (Molina, 2005). Ver figura 5, 6 y 7.

]]>

La oblea viene de fabrica pulida en acabado espejo por una de sus caras, la cual hay que identificar por microscopio, ésta se marca y se procede al corte del cristal en múltiples trozos que tienen que ser identificados, clasificados y guardados para su uso posterior como sensor óptico que denominaremos como galga óptica u optogalga.
Tanto la galga extensométrica como la optogalga siguen básicamente el mismo procedimiento técnico de implante. Éste incluye preparación de rugosidad de superficie, desengrase, acondicionamiento, catalizador y adhesivo, a excepción de la necesidad del cableado en la galga extensométrica, siendo esto una ventaja fundamental (Dally, 1993), (Vishay™, 2009), (Omega™, 2009).
El flexor es una herramienta sencilla y económica para lograr grandes esfuerzos cerca del empotramiento del espécimen (Vishay™, 2002) (Gere, 1964). Ver figura 8 a).
El dispositivo Portaflexor fue diseñado para permitir hacer ajustes de perpendicularidad y rotación del dispositivo flexor y tener una mayor rigidez del sistema. Conservando los ajustes geométricos del arreglo con un mínimo de cambios a pesar de estar interviniendo manualmente (o por servomotor) el avance del micrómetro durante las corridas experimentales. Ver Figura 8 b) y 8c).
A continuación se describen las condiciones del Banco Experimental:
Para evidenciar la sensibilidad del sistema se utilizó un rango de bajo esfuerzo (flexión de viga de 0 a 2 mm) con pequeños incrementos de 0.01 mm de avance del micrómetro. La deformación se consigue mediante el empuje del propio micrómetro, de donde se toma lectura del avance. En la visualización de la simulación de desplazamiento (ver Figura 9), se observa la región de mínimo desplazamiento cerca del empotramiento donde están colocadas la optogalga (cara frontal a tensión) y la galga extensométrica (cara posterior a compresión), así como el desplazamiento máximo yf (flecha), correspondiente al extremo de la viga desplazada y medida por el micrómetro . Para este rango de flexión baja correspondiente al máximo de 2 mm de flecha yf se tiene un factor αn=0.0125 , lo cual permite aplicar el modelo lineal (Feynman, 1964), (Belendez, 2001).
]]>
Hay un límite de linealidad geométrica para flechas yf mayores a 0.0417 m (4.17 cm) en la viga Vishay de 6.35 mm de espesor, el modelo lineal es válido solo para pequeñas flexiones αn< 0.375, (Belendez, 2002). En cuanto al régimen elástico de las corridas experimentales, la deformación de las fibras exteriores de la viga deberá estar dentro del límite elástico del material en los rangos de prueba, salvo que intencionalmente se esté estudiando régimen plástico. Donde probablemente no se utilice una optogalga, sino la superficie misma del material en estudio (Cole, 2003), (Martin, 2004).
Modulador PEM 100 ajustado a 45°, λ=635 nm (señal de referencia) y retraso de onda de 0.5λ, polarizador inicial Rochon 0º. La amplitud del retardo se programa acorde a la longitud de onda en uso para lograr un haz modulado en polarización que tiene como extremos de polarización dos estados de polarización lineales mutuamente perpendiculares.
Fuente de alimentación Newport 5005 de Diodo Láser ajustada a l0= 14.40 mA, Vf=2.17 V en corriente directa.
Amplificador Lock-in estabilización de señal r debajo de nivel de saturación, Ajuste de sensibilidad media de Δr y estabilización. Aplicación de filtros de rechazo, señal de referencia por Modulador fotoelástico.
Alineación de láser, polarizador, modulador y detector; la luz linealmente polarizada se hace incidir a ángulos tan cerrados como sea posible, para considerar que se trata de una incidencia y reflejo especular perpendicular, en la que no exista diferencia sustancial entre la reflectividad paralela y perpendicular al plano de incidencia (Tompkins, 1999). A partir de la fuente de luz, ésta se polariza linealmente con un polarizador tipo Rochon. El rayo con componente paralela al plano de incidencia pasa a través del modulador fotoelástico. Posteriormente incide sobre la muestra en estudio, midiéndose los cambios en intensidad en el orden de milésimas respecto al promedio, que se asocia a la diferencia de reflexión entre dos direcciones perpendiculares y en la que una de ellas coincidirá con la dirección del esfuerzo aplicado. Desde los orígenes de RAS con Aspnes, esta diferencia de reflexión al dividirse entre la señal promedio (Ver ecuación 1), se conoce como Reflectando Anísotrópica Normalizada en la literatura, es una cantidad adimensional (u.a), lo mismo aplica para RAL, que es una derivación de RAS a una frecuencia fija.
Resultados y Discusión
En las Figuras 10 y 11 se presentan las gráficas que se obtuvieron de las pruebas de Extensometría, desplazamiento del micrómetro y señal RAL, así como la correlación de ambas señales.
]]>

Se extendió el rango de medición hasta 6 mm de flecha, encontrándose una alta correlación también entre ambas variables, Figura 12.

]]> Haciendo un ajuste lineal entre la señal de RAL contra Extensometría o contra avance de desplazamiento de micrómetro, se observa lo siguiente:
Una fuerte correlación entre las variables de 0.995. La correlación cercana a la unidad nos indica que ambas señales varían en forma lineal en el intervalo de prueba. Lo que implica que las microdeformaciones (1με= 1 × 10-6 m/m) obtenidas por extensometría pueden ser evaluadas por una ecuación lineal Y=a+bX a partir de lecturas de RAL.
El sentido positivo por el crecimiento monótono de los valores de RAL Normalizada con respecto al promedio de extensometría. La señal de RAL está cambiando por variación de la anisotropía óptica en el cristal de silicio. Esta anisotropía óptica es inducida por la deformación aplicada al volumen (probeta Vishay) donde se encuentra el cristal adherido. De tal manera que el cristal de Silicio actúa como "transductor" de deformación en la probeta, tal como lo testifica la señal de la galga extensométrica.
Una variante del sistema puede consistir en utilizar una maquina universal de tensión sustituyendo al flexor Vishay, para otros rangos de esfuerzo-deformación.
Se realizó una búsqueda inicial ante el IMPI, con Folio DDPSIT2.08-51 1, no encontrándose sistema patentado con principios de funcionamiento similar al presentado en este artículo, se continúa con el trámite de la patente en el IPN.
Conclusiones
Se ha mostrado que la Técnica óptica de reflectando diferencial laser RAL, permite el monitoreo de microdeformaciones sin contacto en base a propiedades de anisotropía óptica dependiente de la deformación inducida en cristales de Silicio. Con esto se abre la posibilidad del estudio de capas delgadas de semiconductores como posibles Opto-Galgas (transductores) para el estudio de microdeformaciones.
Resalta la importancia de su potencial aplicación Tecnológica:
]]> • Para la caracterización de nuevos materiales en desarrollo experimental (Feliu, 2006).• Como Sonda de no contacto de posible aplicación en áreas de gran importancia en diseño en micro y nano escala de robótica y mecanismos dóciles (compliant) (Tseytlin, 2006).
• Retroalimentación en el control de brazos robóticos flexibles. (Shuzhi, 1998) (Martins, 2002)
• Análisis de esfuerzos intrínsecos en un área tecnológica donde las galgas extensométricas no pueden competir ya que su uso es difícil, si no imposible, de aplicar. La posibilidad de caracterización de estados de esfuerzo nativos o intrínsecos a nivel nanométrico por medios de no contacto abre posibilidades al desarrollo de nuevas tecnologías como lo es el desarrollo de heteroestructuras con propiedades optoelectrónicas relacionadas a estos estados de esfuerzo (Nakamura, 2005), (U.S. Provisional Patent Application, 2009). Actualmente están en estudio muestras crecidas en el equipo MBE (Epitaxia de Haces Moleculares) del Departamento de Física Cinvestav, IPN.
Posibles ventajas del sistema Propuesto
Las técnicas de espectroscopía óptica se han desarrollado principalmente motivadas por el desarrollo de dispositivos optoelectrónicos de gran importancia tecnológica, sus aplicaciones se han extendido, siendo muy variadas ya que son técnicas de medición de las llamadas ideales:
• No se perturba el sistema que se mide, por ser no invasiva y sin contacto, lo que permite regularmente hacer mediciones a distancia.
• Es virtualmente inmune a la interferencia por estática que se presenta en las instalaciones cableadas, tampoco hay que realizar compensación de longitud de cable (resistencia extra, para el balanceo del puente Wheatstone) ya que es inalámbrica.
]]> • Podría usarse en largos periodos de monitoreo, y en forma continua, sin problemas de calentamiento o necesidad de compensación de temperatura ya que no requiere de voltaje de excitación (para los puentes de Wheatstone), como es requerido en el uso de las galgas extensométricas.• Las Optogalgas son reutilizables, el monocristal de silicio es retirable utilizando una mezcla solvente a base de acetona y es reinstalable sin deterioro físico.
• Hay aplicaciones en las que no se cuenta con otra opción, por las dimensiones físicas. No siempre las tecnologías convencionales y maduras podrán resolver los problemas que se presenten en el futuro, como lo es ya el caso de la caracterización de heteroestructuras.
Posible inconveniente.
• Requiere de equipo de laboratorio multipropósito. No es específico para la aplicación de RAL, al momento. Sin embargo cada uno de los componentes del sistema puede irse desarrollando para desempeñar una tarea dedicada y única. Como lo fue, por ejemplo, la sustitución inmediata del Monocromador por el Diodo Láser. De la misma forma se podrían ir desarrollando los demás componentes. Con excepción del modulador fotoelástico, los demás componentes no presentan limitante para la miniaturización del sistema y reducción de los costos de hardware.
Agradecimientos
CHSZ manifiesta su agradecimiento a: DGEST por la licencia comisión otorgada para estudios de Doctorado en el IPN. A CONACyT por su apoyo No. 202283 para este fin. Las valiosas observaciones del Dr. Juan Bautista Hurtado y del Dr. Iván Domínguez López miembros del comité tutorial. Así como la paciencia y tiempo dedicado en entrevistas directas al Dr. J. Rafael Molina Contreras en la revisión de mis ideas y escritos dada su valiosa experiencia en RAS.
]]> Referencias y apéndices.
1. Arteaga Marco A., " On the Properties of a Dynamic Model of Flexible Robot Manipulators". Journal of Dynamic Systems, Measurement, and Control. Vol.120, No. 1, March 1998. [ Links ]
2. Aspnes D. E. and Studna A., "Anisotropies in the Above Band-Gap Optical Spectra of Cubic Semiconductors," Phys. Rev. Lett. 54 (17), Apr 29, 1956-1959, 1985. [ Links ]
3. Beasley Ryan A., Howe Robert D. "Increasing Accuracy in Image-Guided Robotic Surgery through Tip Tracking and Model-Based Flexion Correction". IEEE Transactions on Robotics, Vol. 25, No. 2, April, 2009. [ Links ]
4. Beléndez T. y Beléndez A. "No linealidad Geométrica en Mecánica de Sólidos: Una Experiencia de Laboratorio". Real Sociedad Española de Física. 2001. ISBN:84-932150-0-7 [ Links ]
5. Belendez Tarsicio, Neipp Cristian and Belendez Augusto. "Large and small deflections of a cantilever beam". European Journal of Physics. Institute of Physics Publishing, 2002. [ Links ]
]]>6. Blackford J. R., Koutsos V., Martin D. S., Roseburgh D. S., Madani-Grasset F., Schwerdtfeger J. V., Kratiras C., Zaiser M., and . Cole R. J. "RAS as a remote sensor of plastic deformation in metals". Phys. stat. sol. (c) 2, No. 12, 3997-4002, 2005. / DOI 10.1002/pssc.200562225. [ Links ]
7. Chang L-W, "Dynamic analysis of robotic manipulators with flexible links", Dissertation Abstracts International Part B: Science and Engineering, vol. 46, no. 2, 1985. [ Links ]
8. Cole R. J., Kheradmand S., Higgins D. D., Madani F., Macdonald B. F., Koutsos V. and Blackford J. R. "Stress-induced optical anisotropy in polycrystalline copper studied by reflection anisotropy spectroscopy". Journal of Physics D: Applied Physics, 36 (L1 15-L118) University of Edinburgh, Edinburgh, UK, 2003. [ Links ]
9. Dally James W., Instrumentation for Engineering Measurements. John Wiley & Sons Inc., 211-234, 1993. [ Links ]
10. De León-Morales J., Alvarez-Leal J. G., Castro-Linares R. And Alvarez-Gallegos J. "Control of a flexible joint robot manipulator via a non-linear control-observer scheme". Int. J. Control, Vol. 74, No. 3, 290 - 302, 2001. [ Links ]
]]>11. Feliu Vicente Battlle. "Robots Flexibles; Hacia una generación de Robots con nuevas prestaciones". Revista iberoamericana de Automática e Informática Industrial., Vol. 3, Núm. 3, julio, 24-41, 2006. ISSN 1697-7912. [ Links ]
12. Feynman Richard P., Leighton Robert b., Sands Matthew. Feynman Lectures on Physics Volume 2, Addison-Wesley, 1964, Cap 38; Elasticity. [ Links ]
13. Gere James M. y Timoshenko S. P., Mecánica de Materiales. Grupo Editorial Iberoamerica, 377-381, 395-396. 1986. [ Links ]
14. Huerta Ruelas J. A. Anisotropías Ópticas en Cristales de Teluro de Cadmio. Tesis de Maestría. UASLP. 1995. [ Links ]
15. Kumar Santosha Dwivedy, Eberhard Peter. "Dynamic Analysis of Flexible Manipulators, a Literature Review". Mechanism and Machine Theory. 41, 749-777, 2006. [ Links ]
]]>16. Martin D. S., Weightman P., "Reflection anisotropy spectroscopy of molecular assembly at metal surfaces," Thin Solid Films 455-456, 752-758, 2004. [ Links ]
17. Martins Jorge, Ayala Botto Miguel, Da Costa José Sá. "Modeling of Flexible Beams for Robotic Manipulators". Multibody System Dynamics, 7, 79-100. Kluwer Academic Publishers, 2002. [ Links ]
18. Mayer J. R. Rene and Graham A. Parker. "A Portable Instrument for 3-D Dynamic Robot Measurements Using Triangulation and Laser Tracking". IEEE Transactions on Robotics and Automation, Vol. 10, No. 4, August 1994. [ Links ]
19. McInroy, J.E., Saridis, G.N., "Acceleration and torque feedback for robotic control: Experimental results", Journal of Robotic Systems, vol. 7, no. 6, 813-832, 1990. [ Links ]
20. Meggiolaro M.A., Steven Dubowsky, and Constantinos Mavroidis. "Geometric and elastic error calibration of a high accuracy patient positioning system". Mechanism and Machine Theory Elsevier, 40, 415-427, 2005. [ Links ]
]]>21. Molina C. J. Rafael, Espinosa-Luna Rafael. "Reflectance-difference study near the E1 and E1 + Δ1 transition regions of CdTe". J. Phys. D: Appl. Phys. 38, 12-16, 2005. [ Links ]
22. Nakamura Takahiro, Okuda Tetsuro, Kobayashi Ryuji, Muroya Yoshiharu, Tsuruoka Kiyotaka, Ohsawa Youichi, Tsukuda Takumi, Ishikawa Shin "1.3-μm AlGaInAs strain compensated MQW-buried-heterostructure lasers for uncooled 10-Gb/s operation". IEEE Journal of selected topics in quantum electronics ISSN 1077-260X CODEN IJSQEN, vol. 11, No.1, 141-148, 2005. [ Links ]
23. Omega™. www.omega.com [ Links ]
24. Papadimitriou D. and Richter W. "Highly sensitive strain detection in silicon by reflectance anisotropy spectroscopy". Physical Review B 72, 075212, 2005. [ Links ]
25. Rönnow D., Lastras-Martínez L. F., Cardona M., and Santos P. V., "Determination of the piezo-optical properties of semiconductors above the fundamental gap by means of reflectance difference spectroscopy," J. Opt. Soc. Am. A 16, 568-573, 1999. [ Links ]
26. Saucedo Zárate Carlos Humberto, Carlos Sánchez López, Jorge Adalberto Huerta Ruelas. Diseño y Fabricación de Prototipo para el Estudio de Esfuerzos en Cadenas Cinemáticas, ENINVIE, Encuentro de Investigación en Ingeniería Eléctrica. Zacatecas, Zac, Marzo 28-30, 2007. [ Links ]
27. Saucedo Zárate Carlos Humberto, Sánchez López Carlos, Huerta Ruelas Jorge Adalberto. "Diseño preliminar de un banco didáctico/experimental Para el estudio de esfuerzos en cadenas cinemáticas reconfigurables", Conciencia Tecnológica No. 32, Julio-Diciembre 2006, ISSN: 1405-5597. [ Links ]
28. Saucedo-Zárate Carlos H., López-López Máximo, Sánchez-López Carlos, Correa Jose Luis. Reflectance difference laser measurements applied to the study of the stress/strain state in materials. Proc. SPIE, Vol. 7499, 74990U. 2009; doi:10.1117/12.849043. [ Links ]
29. Shuzhi S. Ge, Lee T. H., and Zhu G. "Improving Regulation of a Single-Link Flexible Manipulator with Strain Feedback". IEEE Transactions On Robotics And Automation, Vol. 14, No. 1, February 1998 . [ Links ]
30. Tompkins Harland G., William A. McGahan. Spectroscopic Ellipsometry and Reflectometry. A user's Guide. John Wiley & Sons, Inc. pp 2-16, 1999. [ Links ]
31. Tseytlin Yakov M. Structural Synthesis in Precision Elasticity. Mechanical Engineering Series. Springer. 2006. USA. ISBN 10: 0-387-25156-1 [ Links ]
32. U.S. Provisional Patent Application Serial No. 61 /126,680, filed May 6, 2008. (Wo/2009/137556) "Group III Nitride Templates and Related Heterostructures, Devices, and Methods for Making them", 2009. [ Links ]
33. Vishay™ Education Division. Vishay Flexor. Cantilever Flexure Frame. Instruction manual. 1982. [ Links ]
34. Vishay™ Education Division. Experiments in Mechanics Strain Gages Series. E-1 05 Cantilever Flexure, Experiments in Mechanics Strain Gages Series. E-1 03 Principal Strains and Stresses - Flexure. March 2002. [ Links ]
35. Weightman P., Martin D. S., Cole R J and Farrell T. "Reflection anisotropy spectroscopy". Reports on Progress in Physics. 68, 1251-1341, 2005. [ Links ]
]]>