
Luis Bernardo Ugarte Lucuy1, Manuel Euripides Ruiz-Sandoval Hernández2 y Bill F. Spencer3
1 Proyecto Torres Tres Carabelas, Bolivia.
2 Universidad Autónoma Metropolitana- Azcapotzalco.
3 University of Illinois at Urbana Champaign.
Artículo recibido el 28 de noviembre de 2012
Aprobado para su publicación el 19 de diciembre de 2012
Resumen
Una de las metas en la ingeniería estructural es la de disminuir los efectos que las solicitaciones sísmicas puedan producir en las construcciones. Excesivos desplazamientos o aceleraciones conllevan a un deterioro de las condiciones de seguridad y servicio de las estructuras. Esta situación pone en riesgo a sus ocupantes, así como a las construcciones aledañas.
El control estructural ha tenido un gran auge en las últimas décadas, y tiene por objetivo el mantener las solicitaciones sísmicas dentro de límites preestablecidos. Existen diferentes tipos y clasificaciones de control, siendo una de las usadas las que se basan en el principio de funcionamiento de los dispositivos empleados: pasivos, activos y semiactivos. Otra forma de control que ha sido utilizada recientemente es mediante el acoplamiento de dos o más sistemas estructurales por medio de dispositivos de pasivos. Una de las ventajas es la distribución de las fuerzas sísmicas entre las estructuras y una disminución en las secciones de los elementos estructurales.
En este trabajo se presenta el estudio del acoplamiento entre dos estructuras por medio de dispositivos semiactivos. El primer paso consiste en determinar cuál es el efecto que se tiene en el sistema cuando las dos estructuras tienen masas iguales o con cierto grado de diferencia. Posteriormente se investiga cuántos y cuáles son los puntos de acoplamiento óptimos entra ambas estructuras. Finalmente se presenta le distribución del cortante basal en función del tipo de dispositivo de control utilizado. Los resultados muestran que el uso de los dispositivos de control semiactivos puede ser considerado como una opción viable en el control estructural de estructuras acopladas.
Palabras clave: Control estructural, estructuras acopladas y dispositivos semiactivos.
Abstract
One of the challenges in structural engineering is diminishing the effects seismic stresses can produce in structures. Excessive displacement or acceleration together can cause a deterioration of safety conditions and maintennance of the building. This situation places the occupants as well as neighboring structures at risk.
There has been a great boom in the upgrading of structural control in the last decades, and it's objective is maintaining 9 seismic stresses within preestablished limits. There are different types and classifications of controls; one of them being used is based on the performance of devices in place: passive, active and semi-active devices. Another form of control that has been used recently is by means of coupling two or more structural systems through passive mechanisms. An advantage is the distribution of seismic forces within the structures and a displacement or diminishing in sections of the structural elements.
]]> In this work, a study of coupling between two structures through sem-active devices is presented. The first step g consists of determining the resulting effect in the system when the two masses are equal or are different to a negligible degree. Afterward, which and how many points of optimal coupling between the two structures is investigated.Finally, the performance of distribution of basal shear in the type of control device used is presented. The results demonstrate that the use of semi-active control devices could be considered as a viable option in the structural control of adjoined structures.
Key words: Structural control, adjoined (coupled) structures and semi-active devices (mechanisms)
Resumo
Uma das metas na engenharia estrutural é o de reduzir os efeitos sísmicos que podem ocorrer nas construções. Os deslocamentos excessivos ou acelerações levam a um deterioramento das condições de segurança e de serviço das estruturas. Esta situação ameaça a seus ocupantes e às construções circunvizinhas.
O controle estrutural tem crescido muito nas últimas décadas, e tem como objetivo manter as solicitações sísmicas dentro dos limites pré-estabelecidos. Os diferentes tipos de classificação e de controle, zendo um dos maíz utilizados, balsean-se no principio do funcionamiento dos dispositivos empegados: pasivos, activos e semiactivos. Outra forma de controle que tem sido utilizado recentemente é mediante o acoplamento de dois ou mais sistemas estruturais por meio de dispositivos passivos. Uma das vantagens é a distribuição das forças sísmicas entre estruturas e uma diminuição nas seções dos elementos estruturais.
Este trabalho apresenta o estudo do acoplamento entre duas estruturas através de dispositivos semiativos. O primeiro passo consiste em determinar qual é o efeito provocado sobre o sistema, quando as duas estruturas têm massas iguais ou com certo grau de diferença. Posteriormente se investiga quantos e quais são os pontos ideais de acoplamento entre ambas as estruturas. Por fim, apresenta-se a distribuição do corte de base por tipo de dispositivo de controle utilizado. Os resultados mostram que o uso dos dispositivos de controle semiativos pode ser considerado como uma opção viável no controle estrutural das estruturas acopladas.
Palavras chave: Controle estrutural, estruturas acopladas e dispositivos semiativos
]]> INTRODUCCIÓN
Eventos sísmicos de gran intensidad ocurren cada año en diferentes zonas del mundo. Recientemente, estos han cobrado miles de vidas humanas, así como incalculables pérdidas económicas. Una forma de mitigar estos daños es la reducción de los efectos sísmicos sobre las estructuras. Existen diferentes técnicas para reducir los efectos de eventos dinámicos. Las primeras usadas fueron la inclusión de aisladores de base, cuyo objetivo es la colocación de una capa intermedia entre la estructura y el terreno. Esta técnica tiene un cierto grado de eficiencia y depende en gran medida de las características de la excitación a la que está sujeta la estructura. De esta manera no necesariamente será efectiva para cualquier tipo de sismo.
En las últimas décadas, los sistemas de control estructural han cobrado importancia dentro del campo de la ingeniería estructural. Estos sistemas no buscan el aislamiento de la estructura, sino el delimitar su respuesta por medio de dispositivos ubicados estratégicamente en ella. Hay una gran variedad de estos dispositivos basados en diferentes principios de funcionamiento. Uno de los más atractivos por su eficiencia son los sistemas activos. Éstos pueden producir fuerzas sobre la estructura tanto de empuje como de jale. Éstas, si no son calculadas correctamente, pueden provocar una desestabilización del sistema. Adicionalmente, requieren de grandes cantidades de energía, que en el momento de un evento sísmico, puede no estar disponible. Así, será necesario contar con fuentes alternativas de energía en caso de una emergencia.
Otros sistemas menos eficientes son los semiactivos. Éstos combinan las bondades de sistemas activos y pasivos. Dado su principio de funcionamiento, sólo pueden oponerse al movimiento de la estructura de forma variable, de tal forma que no pueden desestabilizar al sistema. Finalmente, la energía necesaria para su operación puede ser proporcionada por una batería de baja potencia. De acuerdo con las características descritas en este estudio sólo se consideran los dispositivos semiactivos como sistemas de control estructural.
Recientemente se han buscado nuevas estrategias de control que no necesariamente involucran a la misma estructura sino a la unión de dos o más de ellas. La idea es aprovechar el control que pueda ejercer una estructura sobre la otra y 3 de esta manera realizar un algoritmo que minimice las respuestas de ambos edificios.
El concepto de acoplar edificios fue introducido en Estados Unidos por Klein et al. en 1972, y pocos años después por Kuneida en Japón (Christenson, 2001). Desde ese tiempo, se realizaron muchos estudios analíticos y pruebas experimentales, primero enfocados en las características de los edificios; luego se plantearon variantes del dispositivo de | acoplamiento, como el tipo, la cantidad y ubicación adecuada de éstos, para generar un control adecuado; y posteriormente se implantan dispositivos de control (activo, pasivo y semiactivo) como elemento de conexión para mejorar las > respuestas de ambas estructuras.
El objetivo de este trabajo es el definir las características, ubicación y número de dispositivos de control semiactivo necesarios para el acoplamiento de dos estructuras para lograr una disminución en su demanda de desplazamiento ante un evento sísmico.
La organización de esta investigación está planteada de la siguiente manera. Primero se hace una revisión de los diferentes sistemas de control. Se puntualizan sus ventajas y desventajas. Posteriormente se estudia el efecto que tiene la similitud dinámica entre el acoplamiento de dos estructuras. El siguiente paso es la selección de dos sistemas de estructurales a ser acoplados. Se utilizan dispositivos activos, pasivos y semiactivos y se determina la mejor configuración | de los mismos (cantidad y ubicación). Por último, se utilizan diferentes esquemas de control como elemento de unión entre estructuras y se analizan las propiedades dinámicas de ambos modelos bajo diferentes excitaciones de terreno.
CONTROL ESTRUCTURAL
]]> En las últimas décadas, el control estructural ha cobrado gran importancia como alternativa eficaz para mitigar los efectos dañinos de los desastres naturales (sismo y viento). La noción de control estructural se remonta 110 años atrás, cuando John Milne (Profesor de ingeniería en Japón) construye una pequeña casa de madera sobre esferas, para demostrar que la estructura puede estar aislada de los movimientos del terreno. Por otro lado, a principios del siglo XX, se encontró que los motores de los automóviles y aviones producían importantes vibraciones sobre los puntos de conexión. Por esta razón se vio la necesidad de aislar, absorber o incrementar el amortiguamiento de dichas vibraciones (Housner et al., 1997).La idea de control estructural, es incrementar el amortiguamiento suplementario de las estructuras mediante dispositivos especiales, y de esta manera tengan un desempeño superior ante las cargas dinámicas externas.
SISTEMAS DE CONTROL ESTRUCTURAL
Existen tres principales clases de dispositivos que agregan amortiguamiento suplementario al sistema, los cuales pueden ser categorizados como estrategias de control. El primer tipo se denomina pasivo, y su característica principal es que no es controlable y no requiere ningún tipo de energía externa (Fig. 1).
El segundo tipo se llama activo, y su particularidad es que puede ser controlado; sin embargo, requiere grandes cantidades de energía externa para operar (Fig. 2).
El tercer tipo se denomina semiactivo y combina los aspectos positivos de los sistemas pasivos y activos. Son sistemas que pueden ser controlados dentro de ciertos límites y requieren pocas cantidades de energía externa (Fig. 3).
En los últimos años, el uso de sistemas pasivos se ha hecho muy popular en varios países, incluyendo varias aplicaciones de amortiguadores viscosos y disipadores de energía en México. Debido a su adaptabilidad y reducción de la respuesta los sistemas activos proporcionan un desempeño superior sobre los sistemas pasivos. Sin embargo, su costo y el consumo de energía, restringen su aplicación. Los sistemas semiactivos surgen como una alternativa atractiva para proteger las estructuras, estos dispositivos combinan las mejores características de los sistemas activos y pasivos; proveen la adaptabilidad de un sistema activo, pero sin estar asociadas a grandes cantidades de energía requeridas, además no son capaces de desestabilizar el sistema. La presente investigación se enfocó a estudiar los sistemas de control semiactivo, y debido a sus ventajas respecto a los otros sistemas.
MODELOS DE EDIFICIOS ACOPLADOS DE DOS GRADOS DE LIBERTAD
]]> Se consideran dos sistemas de un grado de libertad acoplados (Fig. 4).La ecuación de movimiento de cada elemento está dada por:
Donde mi, ki y ci representan la masa, rigidez y amortiguamiento de cada sistema, Famortiguamiento es la fuerza que ejerce el amortiguador sobre la estructuras, y Esismo es la fuerza producida por la aceleración del terreno al sistema estructural. Si la ecuación (1) se presenta como una representación de estados se tiene:


Donde los vectores z1 y z2 están definidos con los estados del sistema como:


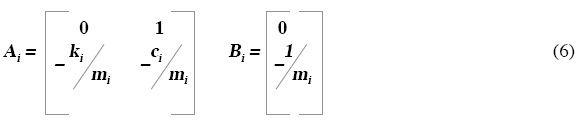
Donde Ai y Bi están definidos como:
]]>
En el caso de considerar como salidas los desplazamientos, velocidades y aceleraciones entonces las matrices Ci están definidas como:

* i: representa el número del edificio considerado.
De la Fig. 4 se determina que el valor del vector ui (fuerza de amortiguamiento) se calcula como:

La velocidad puede ser definida a partir de la ecuación 3 de la siguiente manera:

Donde el vector T1 y T2 definen la salida que modifica la respuesta del sistema:


Si se escribe de forma matricial:
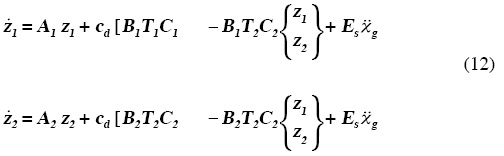
Si los sistemas de un grado de libertad están conectados, entonces el sistema acoplado será uno solo:

El primer término de la ec. 13 (matrices A1 y A2), define las propiedades dinámicas del sistema, ya que están en función de las rigideces (k1 y k2), las masas (m1 y m2) y los amortiguamientos (c1 y c2) de ambos edificios. El segundo término de la ec. 13 representa el efecto de la fuerza de control que ejerce un edificio sobre otro, y su efecto sobre las propiedades dinámicas del sistema; donde B1 y B2 representa la posición del dispositivo de control en la estructura. Los vectores T1, T2 junto con C1 y C2 definen la respuesta del sistema que será modificada, en este caso la será la velocidad debido a que el amortiguador modifica este parámetro.
Como el sistema está sujeto a un movimiento de terreno, se agregó el término Esẍg en la ec. 13; con el fin de diferenciar el término que modifica las propiedades dinámicas debido a la fuerza de acoplamiento (segundo término) y las fuerzas debidas a excitaciones externas como sismos Es g.
g.
En el modelado del sistema se consideran valores paramétricos de la masa, rigidez, amortiguamiento. También se incluye una relación de masas λ= m2/m1. Se considera una variación de λ desde 1 (masas iguales) hasta λ igual a 4.
La conexión de ambos grados de libertad se realizó mediante un amortiguador pasivo. Se busca investigar cómo afectan los valores de este dispositivo en la respuesta del sistema. Para un valor de cd=0, se podría entender que los edificios no están acoplados, mientras que para valores altos de cd, la conexión entre estructuras es rígida.
]]> Con la ayuda del programa Matlab® R2009a se reprodujo el sistema de 2GDL. En la Fig. 5 se muestra la variación de porcentaje de amortiguamiento crítico del sistema en función de los diferentes valores de cd, así como de la relación de masas de los sistemas.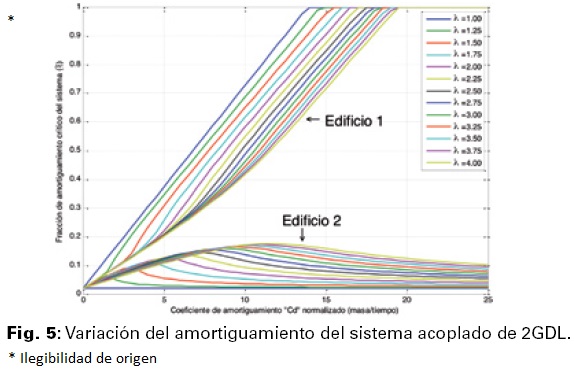
Se observa en la Fig. 5 que a medida que el valor del coeficiente de amortiguamiento cd se incrementa (se hace más rígido), el amortiguamiento del edificio 1 (más pequeño) aumenta progresivamente hasta alcanzar un amortiguamiento crítico. De la misma manera ocurre con el edificio 2, pero el incremento no es considerable (aprox. 18% del crítico) y sólo llega hasta un determinado punto para después decrecer. Como el sistema contiene dos grados de libertad existen dos frecuencias en él; y por tanto, dos modos de vibración. Se observa que a medida que el coeficiente λ aumenta, las frecuencias naturales del sistema tienen valores más alejados entre sí.
Ahora se observa cómo el coeficiente cd afecta las respuestas de la raíz cuadrada media (R.M.S. por sus siglas en inglés) en desplazamientos de ambos modelos (Fig. 6).
De la Fig. 6 se puede concluir que: cuando el coeficiente de amortiguamiento cd se incrementa (más rígido), los desplazamientos en ambos edificios se reducen hasta cierto punto óptimo. A partir de este valor el incremento del coeficiente aumenta los desplazamientos en ambos edificios. También, se aprecia que a medida que los valores del coeficiente λ disminuyen, la capacidad de control se reduce, hasta quedar nula (cuando ω1= ω2). Esto muestra que si los edificios son iguales, el acoplar edificios no es muy eficaz.
MODELOS ANALITICOS DE ESTUDIO
En este trabajo se utilizan los modelos S.A.C.4, que representan modelos estándar de edificios para su aplicación en control estructural. Los modelos contemplan dos edificios: de tres y nueve niveles respectivamente, y representan estructuras típicas de baja y media altura que están ubicadas en una región de alta sismicidad, como es Los Ángeles, California, (Fig. 7).
Los edificios cuentan con un sistema de marcos resistentes perimetrales, que brindan resistencia contra fuerzas laterales. Los claros intermedios están compuestos por marcos simples y tienen poca contribución contra cargas laterales. Ambos edificios cuentan con un sistema de piso de sección compuesta (vigas de acero con losa de piso), que proporciona un diafragma rígido al sistema.
]]> Las columnas del edificio de nueve niveles son modeladas como simplemente apoyadas en la base del sótano y restringidas lateralmente en la base del suelo. Esto debido a la cimentación compuesta de muros de concreto perimetrales alrededor del suelo. Los modelos de estudio no consideran parámetros nolineales en los miembros estructurales. Las vigas y columnas son modelados como elementos de marcos planos (3GDL), de los cuales se determinan las matrices de rigidez y masa para cada estructura. La matriz de amortiguamiento de ambos modelos se determina de acuerdo al criterio de Rayleigh.
SISTEMAS DE EDIFICIOS SAC ACOPLADOS
Se acoplaron los modelos S.A.C. de 3 y 9 niveles (Fig. 8a). Sólo se considera un punto de contacto entre las estructuras. La mejor posición de este dispositivo será investigado más adelante. El diagrama de control retroalimentado del sistema está representado en la figura 8b. La fuerza de retroalimentación del sistema acoplado está en función de las diferencia de velocidades de ambos estructuras, multiplicado por el valor del amortiguamiento de la conexión.
Dónde:
c1 = Velocidad del nivel donde se encuentra el dispositivo de control, edificio 1 (tres niveles).
c2 = Velocidad del nivel donde se encuentra el dispositivo de control, edificio 2 (nueve niveles).
Se creó un modelo matemático de por medio de representación de estados de las estructuras acopladas (ec. 13). Los grados de libertad considerados en cada modelo se muestran en la Fig. 9.
CANTIDAD Y UBICACIÓN ADECUADA DE LOS DISPOSITIVOS DE CONTROL
]]> Después de construidos los modelos matemáticos se procedió a determinar la mejor ubicación de los dispositivos de control, así como la cantidad adecuada de los dispositivos. Para lograr este propósito se consideraron dispositivos pasivos como elementos de conexión (amortiguadores viscosos). Se hizo variar el coeficiente de amortiguamiento cd de conexión para observar su efecto en la reducción de la respuesta de los sistemas acoplados.Se consideraron tres diferentes ubicaciones de conexión los amortiguadores: tercero, segundo y primer nivel. En la Fig. 10 se muestra cada uno de estos arreglos. También se muestra el tipo de línea que será asociado a las conexiones. Así, la línea continua es la conexión en el tercer nivel, la discontinua en el segundo nivel y la intercalada en el primer nivel.
Se calcularon las respuestas R.M.S. en desplazamientos, velocidades y aceleraciones para diferentes valores de cd. En base a estos resultados se determinó la mejor alternativa de conexión (Fig. 11).
En las gráficas de desplazamientos del edificio 1 (Fig. 11), cuando el amortiguador está en el tercer nivel (línea continua), se logra reducir el desplazamiento en el último nivel con un valor de cd menor. Mientras, cuando se considera el dispositivo de control en el segundo nivel (línea discontinua), la respuesta se reduce pero con un valor mayor de cd. Cuando el amortiguador se encuentra en el primer nivel (línea intercalada), la capacidad de control disminuye.
En el caso de las gráficas de velocidades y aceleraciones, se aprecia más claramente el fenómeno anterior, se requiere un cd óptimo menor cuando el amortiguador se localiza en el tercer nivel y un cd más grande cuando el amortiguador está en el segundo nivel. Con ello, se resume que la mejor alternativa es cuando el amortiguador se ubica en el tercer nivel. Y los valores óptimos del coeficiente de amortiguamiento están entre los siguientes valores:

Si se considera que un dispositivo de control comercial tiene un intervalo de cd entre 1.0-50 KN-Seg/mm; los valores óptimos pueden ser alcanzados sin dificultad.
Para los valores de cd seleccionados se calcularon los periodos naturales de cada estructura (Tabla 1) y el amortiguamiento del sistema (Tabla 2).
Una vez que se determinó que la mejor posición de conexión es el punto más alto del menor de las estructuras, se procedió a investigar el número necesario de puntos de conexión para lograr una reducción óptima de desplazamientos. Los modelos considerados se muestran en la Fig. 12. La línea discontinua representa el uso de tres dispositivos, la intercalada el uso de dos y la continua el uso de un solo amortiguador.
Se calcularon las respuestas R.M.S. de los modelos descritos para diferentes valores de cd (Fig. 13).
]]> De la Fig. 13 se puede apreciar que la mejor alternativa es utilizar tres amortiguadores, uno en cada nivel de acoplamiento. Se observa que la capacidad de control cuando existen tres amortiguadores es mayor que cuando existe sólo uno; además, el valor de cd (óptimo) para alcanzar las respuestas mínimas es menor cuando se utilizan tres dispositivos.De los modelos estudiados se puede concluir que:
1. Reducción de las respuestas: El uso de la mayor cantidad de dispositivos de control resulta la mejor alternativa. En este caso particular, con el uso de tres amortiguadores se consiguen reducir efectivamente las respuestas, que cuando se utiliza uno o dos elementos.
2. Respuestas versus costo: Se consigue una mejor respuesta con un número mayor de amortiguadores; sin embargo, si se pondera el elevado costo de los dispositivos de control, la reducción de la respuesta utilizando tres dispositivos o solamente uno, no se justifica económicamente. Por ejemplo, si se analizan las respuestas en desplazamientos del edificio 1 (Fig. 13) utilizando tres y dos amortiguadores, éstas se reduce aproximadamente de 12cm a 4.2 y 4.5cm respectivamente, mientras que utilizando un dispositivo de control en el tercer nivel, la respuesta se reduce de 12 cm a 5.3 cm. Por lo tanto, una reducción en desplazamientos de 1.1 cm representa un gasto doble, considerando un sólo dispositivo o dos.
Al considerar uno y tres dispositivos de control es posible el incrementar el amortiguamiento suplementario del sistema (ver figuras 14 y 15).
SISTEMAS DE CONTROL ACTIVO Y SEMIACTIVO EN ESTRUCTURAS ACOPLADAS
Teoría de control de sistemas activos
La idea del control activo en estructuras eleva los conceptos de ingeniería estructural de la estática usual (diseño de elementos bajo cargas básicas), a comportamientos dinámicos y adaptables que aumentan la capacidad de la estructura a resistir cargas extraordinarias (Soong, 1990).
Si se considera la ecuación de movimiento del sistema:
]]>
Donde M, С y K son las matrices de masa, amortiguamiento y rigidez respectivamente; f(t) es el vector que representa la excitación externa, u(t) el vector definido por la fuerza de control, y por último D y E son las matrices que definen la ubicación de las fuerzas de control y excitación externa.
Si se supone que el vector u(t) es una función lineal del vector de desplazamiento χ(t) la velocidad χ(t) y la fuerza de excitación f(t), la ecuación tiene la siguiente forma:

Donde E1, C1 y K1 son las ganancias de control que dependen del tiempo. Si se remplaza la ecuación 14 en la 15 se tiene:

En la ec. 16 se aprecia el concepto y representación del control activo en estructuras; y como un diagrama cerrado de planta (closed-loop) afecta las respuestas del sistema. Se observa que los parámetros de rigidez y amortiguamiento se modifican por las ganancias, y su reducción y efectividad dependerá de los algoritmos de control seleccionados.
En general, la idea de utilizar un control activo puede modificar las propiedades del sistema (ec. 16), de esta manera se pueden aprovechar los cambios en el sistema para responder a las excitaciones externas de la forma más favorable.
Uno de los primeros pasos para desarrollar la teoría de control activo es seleccionar una función adecuada de la ec. 15, que esté en concordancia con las leyes del control activo. La bibliografía (Soong 1991 y Preumont 2006) propone varios tipos de algoritmos de control para aplicaciones en ingeniería estructural, en la presente investigación se utilizó el algoritmo LQR.
En la presente investigación se utilizó el algoritmo LQR y para ello se define la ecuación de movimiento del sistema, representada en el espacio de estados (ec. 5):
]]>
En la teoría clásica de control, es necesario definir el vector u(t), de manera tal que la respuesta en la ecuación 17 se minimice y a la vez se cumplan todas sus restricciones. Para ello se define el Indice de desempeño, denominado J, (Soong, 1990) y el valor óptimo de la fuerza de control se obtiene como:

Donde P(t) en la teoría de control, representa la matriz de Riccati para un determinado tiempo tf, y su valor se podrá determinar resolviendo la ecuación del mismo nombre (ec. 19):

La ec. 19 está en función de Q y R, que representan las submatrices de ganancia respecto al desplazamiento y la velocidad y tendrán los siguientes valores:
a) Valores de Q.: Valores altos de Q (Q≥0) dan prioridad a la reducción de las respuestas sin importar el tamaño de las fuerzas de control o energía requerida. Por otro lado, valores pequeños de Q limitan la aplicación de fuerzas grandes, minimizando éstas sin importar la reducción de las respuestas.
b) Valores de R.: Valores altos de R (R>0) representan que el ahorro de energía es importante para la aplicación de las fuerzas de control, es decir, el algoritmo busca la mínima fuerza posible para reducir las respuestas. Por otro lado, valores pequeños de R, dan poca importancia al consumo de energía, y por tanto, pueden aplicarse mayores fuerzas de control.
Sistemas de control semiactivo y fuerzas de control
]]> Un sistema de control activo, se podría considerar como un sistema óptimo. Sin embargo, a medida que el sistema requiere la introducción de grandes cantidades de energía, hace ésta técnica poco viable, debido a costos y la inexistencia de dispositivos que generen tales fuerzas.En la actualidad, se han utilizado diferentes tipos de dispositivos semiactivos en estructuras reales, especialmente en Japón. En la presente investigación se utilizó un dispositivo semiactivo de alto desempeño, fabricado por la corporación Kajima (Kurino et al. 2004). Las propiedades del controlador son (Tabla 3):
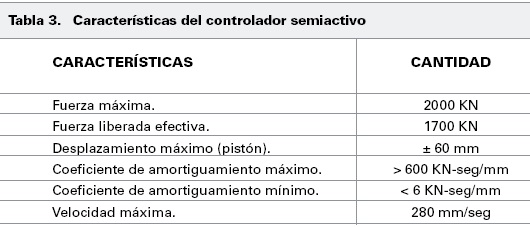
El controlador semiactivo es utilizado de tal manera que las fuerzas requeridas estén dentro de los intervalos admisibles del actuador. El diseño del mismo responderá a las siguientes condicionantes que son implantadas (ec, 20), (Kurata et al., 1999):

Donde u(t) es la fuerza de salida requerida por el sistema y calculada de acuerdo al algoritmo LQR. Si ésta fuerza ,excede el valor fmax del actuador semiactivo, entonces la computadora ordenará la aplicación de esta fuerza máxima (ec. 20). Cuando el valor del cociente entre ui y vi (velocidad en el tiempo i ) tiene un valor mayor al coeficiente de amortiguamiento cdmax entonces la fuerza de salida será fd = cdmax X Vi (ec. 21). Cuando el valor de ui y el cociente ui/vi son menores que los máximos valores del dispositivo, la fuerza de control fd tendrá valores intermedios y suficientes para minimizar las respuestas (ec. 21). Es necesario aclarar que cuando los modelos tengan dos ó tres dispositivos de acoplamiento (uno en cada nivel), existirán tres fuerzas de diferentes magnitudes.
Excitaciones del terreno
Para evaluar los sistemas de control propuestos, se utilizan los siguientes registros acelerográficos: a) El Centro en su componente N-S, registrado en el Imperial Valley Irrigation District, California en mayo de 1940. b) Kobe en su componente N-S, registrado por la Agencia Meteorológica de Japón (JMA) en enero de 1995 durante el terremoto de Hyogo-ken Nanbu. c) Taft en su componente E-W, registrado en la región de Arvin y Tehachapi, California en julio de 1952.
]]> Estos tres registros acelerográficos tienen la particularidad de contener un intervalo de frecuencias alto, lo que conlleva a afectar a estructuras de baja y mediana altura, con periodos los cuales oscilan de 0.2 a 0.8 seg. Los espectros de respuesta en aceleraciones fueron escalados de manera que su velocidad máxima oscile en 50 cm/seg (Kurata et al., 1999). En la Fig. 5.3 se presentan los espectros de respuesta en aceleraciones, cuando se considera una relación de amortiguamiento crítico de 2% del sistema:
Modelos de edificios acoplados con un dispositivo de control
La simulación de los modelos se la realizó mediante la plataforma SIMULINK del programa Matlab® 2009a.
Las respuestas máximas por piso del Edificio 1 (tres niveles) y edificio 2 (nueve niveles) son (Fig. 16):
En la Fig. 16 se observa que los tres sistemas de control reducen las respuestas en el edificio 1. Mientras que en el edificio 2, sólo el sistema activo tiene una buena capacidad de control, el semiactivo reduce las respuestas en poca proporción y el sistema pasivo perjudica las respuestas.
Fuerzas de control efectivas (1 actuador)
La Fig. 17 representa la energía, en términos de fuerza, que cada sistema de control aplica durante la excitación producida por los diferentes acelerogramas. Se observa que el sistema de control activo introduce una mayor cantidad fuerza acumulada que los otros sistemas de control, mientras que los sistemas semiactivos y pasivos son más próximos.
]]> Disipación de energía y comando de fuerza
Otra manera de expresar la reducción de las respuestas es la disipación de energía de cada uno de los sistemas, y se representa al graficar el desplazamiento que sufre el pistón versus la fuerza que ejerce (ver figuras 18, 19 y 20).
Las figuras 21, 22 y 23 representan el comando de fuerza de los dispositivos de control. Por ejemplo, el cuadrante de acción de un sistema pasivo, oscilara respecto al valor del coeficiente de amortiguamiento cd, ya que el único valor variable es la velocidad. En un sistema activo el comando de fuerza tiene su campo de acción en los cuatro cuadrantes; es decir, el dispositivo de control puede "empujar" y "jalar", para contrarrestar las excitaciones externas. En un sistema semiactivo, el campo de acción se limita a dos cuadrantes; es decir, solamente actúa en la misma dirección de la velocidad del edificio.
Distorsiones de entrepiso y cortante basal
En puntos anteriores se presentan resultados relacionados con la dinámica estructural de los modelos y características de los diferentes sistemas de control. A continuación se analiza el comportamiento del edificio considerando las limitaciones que proponen las normas y reglamentos.
Las distorsiones de entrepiso para ambos edificios (tres y nueve niveles) se determinaron para los diferentes sistemas de control, y cuando los edificios están desacoplados. Se aprecia que para las diferentes aceleraciones de terreno consideradas, el comportamiento es parecido. El sistema activo y semiactivo reducen las distorsiones en el edificio 1 casi en la misma proporción (Fig. 24), mientras que la reducción del sistema pasivo no es muy consistente. Para el edificio 2, el sistema activo tiene un mejor comportamiento que el semiactivo, mientras que el pasivo perjudica la reducción de distorsiones (Fig. 24).
En la Fig. 25 se aprecia la reducción del cortante basal en ambas estructuras. El sistema semiactivo tiene un buen desempeño respecto a los demás sistemas de control en el edificio 1. Mientras que en el caso del edificio 2, se observa que el sistema activo tiene una mejor reducción del cortante basal que sus similares pasivo y semiactivo. De hecho, el sistema pasivo no contribuye en la reducción de las respuestas.
Análisis de resultados
]]> Con los modelos simples de 2GDL, se pudo comprender los conceptos de estructuras acopladas, y los parámetros determinantes para que esta técnica sea aplicable en estructuras en escala real, como la razón de masas y/o frecuencias de ambos sistemas. En caso que las frecuencias de ambos edificios sean iguales, se observó que la capacidad de control disminuye considerablemente, lo que implica que es necesario tener dos estructuras disimilares para aplicar esta técnica.Una vez acopladas las estructuras, se realizaron variantes de ubicación y cantidad de los dispositivos de control. Se concluyó que la mejor alternativa es el uso de tres dispositivos en los tres primeros niveles de cada estructura. Sin embargo, cuando se considera un amortiguador en el tercer nivel, también se obtienen resultados equiparables con un tercio del costo del sistema de control.
Se implantaron dispositivos de control pasivos, semiactivos y activos, y se lograron reducir las respuestas de las estructuras, incrementar el amortiguamiento del sistema, disipar la energía producida por el sismo, reducir la cortante basal y distorsiones de entrepiso. Los sistemas activos tuvieron un mejor desempeño en la reducción de las respuestas en ambos edificios; mientras que los sistemas semiactivos tuvieron un comportamiento adecuado en el edificio 1 (tres niveles) pero relativamente bajo sobre el edificio 2 (nueve niveles). Los dispositivos pasivos ayudaron a mejorar las respuestas en el edificio 1, pero no ayudaron a mejorar las respuestas en el edificio 2.
CONCLUSIONES
La técnica de acoplar estructuras resulta una alternativa viable para proteger las estructuras ante acciones dinámicas desfavorables como sismos.
Se encontró que el acoplar estructuras de masas similares no reduce las respuestas dinámicas del sistema. A mayor relación de masas entre las estructuras se tiene la posibilidad de lograr un mejor control estructural entre ambas; sin embargo una razón de diferencia del 25% ya tiene efectos significativos.
La mejor configuración de los sistemas de control resulta en la utilización del máximo número posible de dispositivos acoplados entre cada estructura. Se logró una reducción de desplazamientos hasta 66% con dispositivos semiactivos en la estructura SAC de 3 niveles y de hasta 10% en la estructura SAC de 9 niveles. Para el caso de dispositivos activos es de 57% y 34% respectivamente.
La opción de colocar sólo un dispositivo semiactivo en la ubicación más alta posible de conexión entre las dos estructuras, se obtuvo una reducción de respuestas de hasta 65% y 6% para las estructuras SAC de 3 y 9 niveles. Esta configuración resulta una alternativa factible, considerando el elevado ahorro económico que implicaría utilizar un elemento en vez de tres.
Los sistemas activos producen las mayores reducciones desplazamientos en la estructura SAC de 9 niveles con 28% comparado con el 6% de los dispositivos semiactivos; sin embargo, la fuerza necesaria para tener estos desempeños es aproximadamente de más de 3 veces que la requerida con dispositivos semiactivos.
]]>REFERENCIAS
1. Abe M.; Igusa T., "A rule-based feedforward control strategy with incomplete knowledge of disturbance", en First World Conference of Structural Control, TA 4.63-70, 1994. [ Links ]
2. Akbay Z.; Aktan H. M., "Actively regulated friction slip devices", en 6th Conference on Earthquake Engineering £ in Canada, pp. 367-374, 1991. [ Links ]
3. Caughey T. K.; Karyeaclis M. P., "Stability of semi-active impact damper, Part I-Global behavior; Part II-Periodic solutions", en Journal ApplicationMechanics, 56(4), pp. 926-940, 1989. [ Links ]
4. Christenson R. E.; Spencer B. F., "Semiactive control of civil structures for natural hazard mitigation: analytical and experimental studies", en PHD dissertation, University of Notre Dame, Notre Dame-Indiana, EUA, 2001. [ Links ]
]]>5. Christenson R. E.; Spencer B. F.; Hori N. y Seto K., "Coupled building control using acceleration feedback", en Computer-Aided Civil and Infrastructure Engineering, 18, 4-18, 2003. [ Links ]
6. Christenson R. E.; Spencer B. F.; Johnson E. A.; Seto K., "Coupled building control considering the effects of building/connector configuration", en Journal of Structural Engineering©, ASCE, 10.1061/ASCE 0733-9445(2006), 132:6(853), 2006. [ Links ]
7. Cimellaro G. P, "Coupled building control", en 16th ASCE Engineering Mechanics Conference, Seattle-WA, EUA, 2003. £ 8. Craig R.; Kurdila A., Fundamentals ofStructural Dynamics, John Wiley & Sons Inc., Second Edition-Ney Jersey, EUA, 2006. [ Links ]
9. Cundumi S. O., "A variable damping semiactive device for control of the seismic response of buildings", PHD о Dissertation, University of Puerto Rico, Mayagüez-Puerto Rico, 2005. [ Links ]
10. Dyke S. J.; Spencer B. F.; Sain M. K.; Carlson J. D., "Modeling and control of magnetorheological dampers for seismic response reduction", en Smart Materials and Structures, Vol. 5, pp. 565-575, 1996. [ Links ]
]]>11. Fujimura K.; Sano M.; Watanabe T.; Seto K., "Vibration control of flexible structures Arranged in Parallel by Using Coupled Building Control Mechanism", en Journal Jido Seigyo Rengo Koenkai Koen Ronbunshu, Vol. 47th, Page Rombunno.111, code F0989C, 2004. [ Links ]
12. Housner W.; Bergman L. A.; Caughey T. K.; Chassiakos A. G.; Claus R. O.; Masri S. F.; Skelton R. E.; Soong T. T.; Spencer B. F. ; Yao J. T. P., "Structural control: past, present, and future", en Journal of Engineering Mechanics, Vol. 123, No. 9, ©ASCE, Paper No. 15617, 1997. [ Links ]
13. Kobori T.; Koshika N.; Yamada N.; Ikeda Y., "Seismic response controlled structure with active mass driver system. Part 1: Design", en Earthquake Engineering Structural Dynamics, 20 133-139, 1991. [ Links ]
14. Kurata N.; Kobori T.; Takahashi M.; Niwa N.; Midorikawa H., "Actual seismic response controlled building with semi-active damper system", Earthquake Engineering and Structural Dynamics 28, 1427-1447, 1999. [ Links ]
15. Kurino H.; Tagami J.; Shimizu K.; Kobori T., "Switching oil damper with built-in controller for structural control", en Journal of Structural Engineering, Vol. 129, No. 7, ©ASCE, 2003. [ Links ]
]]>16. Kurino H.; Matsunaga Y.; Yamada T.; Tagami J., "High performance passive hydraulic damper with semi-active characteristics", en 13th world conference on earthquake engineering Vancouver-Canada, paper No. 33, 2004. [ Links ]
17. Luco E.; De Barros F. C. P., "Optimal damping between two adjacent elastic structures", en Earthquake Engineering and Structural Dynamics, 27, 649-659, 1998. [ Links ]
18. Lynch J. P., "Active structural control research at Kajima Corporation", Summer Research Report at Kajima Corporation, Stanford University, 1998. [ Links ]
19. Lynch J. P.; Wang Y.; Swartza R. A.; Lu K. C.; Loh C. H., "Implementation of a closed-loop structural control system using wireless sensor networks", Department of Civil and Environmental Engineering, University of Michigan, Ann Arbor, MI, EUA, 2005. [ Links ]
20. Masri S., "An experimental study of an adaptive momentum exchange damper for structural control applications", en 2nd European Conference on Structural Control, ENPC, Champs-Sur-Marne, France, 2000. [ Links ]
]]>21. Matlab®, "The Language of technical computing", Version 7.8.0.347, Copyright 1984-2009, The MathWorks Inc, 2009a. [ Links ]
22. Morales F. E., "Algoritmo de control de desplazamientos de edificios semiactivo de manera descentralizada", Tesis de Maestría, Universidad Autónoma Metropolitana, México D.F., 2007. [ Links ]
23. Ohtory Y.; Christenson R. E.; Spencer B. F.; Dyke S. J., "Benchmark control problems for seismically excited nonlinear buildings", en Journal of Engineering Mechanics©, ASCE, Vol. 130, 366, 2004. [ Links ]
24. Preumont A., "Vibration control of active structures", Université Libre de Bruxelles, Kluwer Academic Publishers, 2nd Edition, 2006. [ Links ]
25. Rai D. C., "Future trends in earthquake- resistant design of structures", en Current Science, Vol. 79, No 9, Special Section: Seismology, 2000. [ Links ]
]]>26. Shimizu K.; Orui S.; Kurino H., "Observed response of high-rise building with semi-active switching oil dampers to earthquake and typhoon", en 4th World Conference on Structural Control and Monitoring, 4WCSCM-214, 2004. [ Links ]
27. Soong T. T., "Active structural control: Theory and practice", State University of New York Buffalo, John Wiley and Sons Inc. NY, EUA, 1990. [ Links ]
28. Soong T. T.; Masri S. F.; Housner G. W., "An overview of active structural control under seismic loads", en Earthquake Spectra©, vol. 7, No. 3, 1991. [ Links ]
29. Spencer B.F.; Sain M. K., "Controlling buildings: A new frontier in feedback", special issue of the IEEE Control Systems Magazine on Emerging Technology, Vol. 17, No. 6, pp. 19-35, December, 1997. [ Links ]
30. Spencer B. F.; Nagarajaiah S., "State of the art of structural control", en Journal of Structural Engineering, ASCE©, pp. 845 - 856, 2003. [ Links ]
]]>31. Tena A., "Curso de sistemas de control de la respuesta sísmica", Universidad Autónoma Metropolitana, México D. F, 2001. [ Links ]
32. Uang C.; Bertero V., "Use of energy as a design criterion in earthquake-resistant design", Report No UCB/EERC-88/18, 1988. [ Links ]
33. Varadarajan N.; Nagarajaiah S., "Wind response control of building with variable stiffness TMD: EMD/HT", en Journal Engineering Mechanics, in press, 2003. [ Links ]
34. Watanabe T.; Fukuchi S.; Matsumaru K., "Connected control method applied to ordinary and base isolated structures", en 5th World Conference on Structural Control and Monitoring, 5WCSCM-052, 2010. [ Links ]
35. Zhu H.; Wen Y.; Iemura H., "A study on interaction control for seismic response of parallel structures", en Computing Structures, 79(2), pp. 231-242, 2001. [ Links ]
]]>4 S.A.C. Unión de tres instituciones: The Structural Engineers Association of California (SEAOC), the Applied Technology Council (ATC) and California Universities for Research in Earthquake Engineering (CUREE)
]]>