
Sistema robótico guía para la inserción de tornillos en cirugía de fijación de columna
Robotic Guide System for Insertion of Screws in Spinal Fixation Surgery
P.E. Muñoz Rodríguez y A. Vivas Albán
Facultad de Ingeniería Electrónica y Biomédica Universidad Antonio Nariño Popayán, Colombia.
]]> Facultad de Ingeniería Electrónica y Telecomunicaciones Universidad del Cauca Popayán, Colombia.
Correspondencia:
Paul E. Muñoz Rodríguez
Correo electrónico: paulmunoz@uan.edu.co
Fecha de recepción: 6 de febrero de 2015.
Fecha de aceptación: 20 de abril de 2015.
Resumen
]]> El presente artículo muestra el diseño y operación de un primer prototipo de robot para la guía en la inserción de tornillos en cirugía de fijación de columna. Este tipo de cirugía, realizada normalmente de forma manual, puede producir muchas lesiones debido a errores humanos al momento de introducir los tornillos en las vértebras del paciente. Para evitar dichos errores se puede utilizar la tomografía computarizada, pero los resultados son mucho mejores si un robot asistente proporciona al cirujano el camino para la inserción del tornillo, según la imagen del tomógrafo. Este artículo muestra como utilizando un robot comercial de bajo costo se puede implementar un sistema que provee una solución funcional a este problema. Se implementó un software que permite definir la posición inicial y final del tornillo a ser introducido, sobre la imagen Dicom del paciente. Con esta información el sistema mueve el robot el cual posee un anillo que guiará al cirujano en la inserción final. Los resultados muestran un sistema bastante preciso ofreciendo al cirujano un camino seguro de inserción.Palabras clave: robótica quirúrgica, cirugía de fijación de columna, inserción de guías, imágenes en formato DICOM.
Abstract
This article presents the design and operation of the first prototype of a robot, designed to guide the insertion of screws in spinal fixation surgery. This type of surgery, usually done manually, could cause many injuries due to human error at the moment of inserting the screws into the patient's vertebrae. Computed tomography can be used to avoid such errors, but the results are much better if a robot assists and indicates the surgeon the path for the insertion of the screw, according to the image scanner. This article shows how using a commercial low-cost robot can be implemented in a system that provides a practical solution to this problem. A software that allows you to define the start and the end positions of the screw to be introduced on the Dicom image of the patient, was implemented. With this information the system moves the robot which has a ring that will guide the surgeon in the final insertion. The results show a fairly accurate system, giving the surgeon a safe path of insertion.
Keywords: surgical robotics, spinal fixation surgery, insertion guides, images in DICOM format.
INTRODUCCIÓN
La robótica médica es una tecnología en desarrollo que está revolucionado la práctica quirúrgica desde hace algunos años, con robots asistentes que proveen al cirujano de una precisa herramienta de apoyo en sus tareas cotidianas. Las ventajas para el paciente son múltiples como cicatrices más pequeñas, menor pérdida de sangre, tiempos de recuperación más cortos, entre otras. Pero lo más importante es la disminución en los errores que pueden ser atribuibles al personal médico [1, 2].
Dentro de las intervenciones quirúrgicas delicadas se encuentra la cirugía de fijación de columna, la cual consiste en inmovilizar dos o varios segmentos vertebrales empleando tornillos que son conectados por barras metálicas, procedimiento que se emplea en hernias discales, fracturas o escoliosis, entre otros [3]. Este tipo de cirugía requiere de gran precisión ya que se pueden presentar complicaciones graves como son la invasión del canal vertebral, la cual ocurre al introducir un tornillo excesivamente medial, inferior o lateral a la línea medial, ocasionando pie caído, incontinencia urinaria, dolor y disfunción sexual [4]. Otra de las lesiones comunes ocurre cuando el tornillo sobrepasa el cuerpo vertebral, lesionando vasos sanguíneos como aorta, vena cava inferior, o vasos iliacos, originando graves hemorragias en el paciente.
]]> La mala colocación de los tornillos según estudios se encuentra en alrededor del 6%-30% [5]. Estos errores se pueden disminuir empleando cirugías planeadas por computador, pudiendo disminuirse aún más empleando robots que cooperen en la cirugía, posicionado y ubicando el instrumental en una localización precisa.Actualmente existen en el mercado dos dispositivos robóticos que asisten al cirujano en este tipo de cirugías, el SpineAssist, y el AQrate. Los dos robots cuentan con la aprobación de la Agencia de Medicamentos y Alimentos de los Estados Unidos, referente mundial para el uso de este tipo de dispositivos en seres humanos. El primero consiste en un robot pequeño que se monta sobre la columna del paciente, permitiendo al cirujano realizar planificaciones pre-operativas basadas en tomografías tridimensionales [6]. El segundo dispositivo consta de un sistema robótico móvil, integrado a un sistema de seguimiento óptico el cual guía al cirujano a través de las diversas etapas de la cirugía [7]. Sin embargo el costo de dichos robots supera los 100.000 dólares, lo cual hace que no sean muy fáciles de adquirir para los hospitales latinoamericanos.
Por tal motivo el objetivo de este proyecto es construir un primer prototipo de un sistema que pueda servir de guía para la inserción de los tornillos por parte del cirujano, en las vértebras del paciente. El sistema desarrollado utiliza un robot comercial de bajo costo, el cual permite posicionar y orientar una guía por donde se introducirá el tornillo que permitirá la fijación de la columna. El sistema emplea las imágenes en formato Dicom del paciente, obtenidas de un tomógrafo axial computarizado, y con base a ellas posiciona y orienta el robot.
MATERIALES Y MÉTODOS
Brazo robótico OWI
Se escogió para este proyecto el brazo robótico de entrenamiento modelo OWI 0C7[8]. Este brazo sobresale por su bajo costo (alrededor de 100 dólares), cuenta con 4 articulaciones y un gripper tipo pinza. Sin embargo no cuenta con sensores de posición, y sus 4 articulaciones no le proporcionan Codos los movimientos necesarios para el posicionamiento de la guía. Por tal motivo la primera modificación realizada consistió en cambiar la pinza por una articulación adicional, donde se ubicó el anillo guía, para el tornillo a insertar. La segunda modificación radicó en colocar potenciómetros lineales como sensores de posición en cada articulación, dado que los motores originales no vienen con este tipo de sensores. La Figura 1 muestra el robot comercial utilizado y el CAD del mismo con la modificación en su órgano terminal.
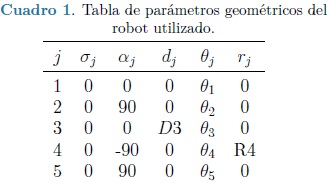
El brazo robótico modificado contará ahora con 5 grados de libertad, mostrándose en la Figura 2 su arquitectura, la cual consta de cinco articulaciones rotacionales.
]]>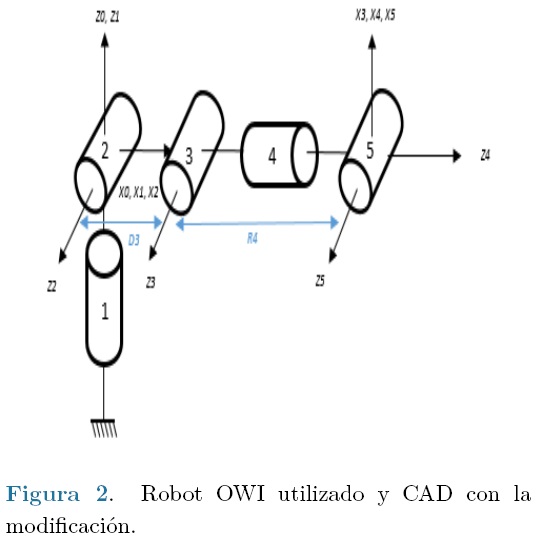
El Cuadro 1 presente los valores de los parámetros geométricos, siguiendo la notación de Khalil-Kleinfinger [9]. Estos valores definen la estructura matemática del mismo, donde j designa el número de la articulación, σj se refiere al tipo die articulación (0 para las articulaciones rotacionales, 1 para las prismáticas), αj se refiere al ángulo entre los ejes zj, dj re presenta la distancia entre los ejes zj, θj simboliza la variable articular rotacional o un ángulo entre los ejes xj, y por último rj simboliza la variable articular prismática o una distancia entre los ejes xj.
La mejor opción hubiera sido disponer de un robot; de 6 grados de libertad, el cual permitiría posicionar y orientar el órgano terminal en todas las direcciones, pero por simplicidad y aprovechando las facilidades que proporciona el OWI 007, en esta primera fase se utilizó dicho robot con solo una modificación articular.
Para la implementación del controlador, se obtuvo el modelo dinámico del robot, el cual incluye las masas e inercias de las articulaciones, mediante el software Symoro [10]. Se implementó un controlador PID cartesiano [11, 12] simulado en el ambiente Matlab/Simulink, lo cual permite aproximar el comportamiento de las articulaciones del robot frente a una consigna en el espacio cartesiano. La simulación también permite establecer el de trabajo del robot, el error cartesiano, y los valores de sintonización del controlador, los cuales serán pasados posteriormente al hardware del sistema. La Figura 3 muestra el controlador cartesiano implementado en el ambiente Matlab/Simulink.
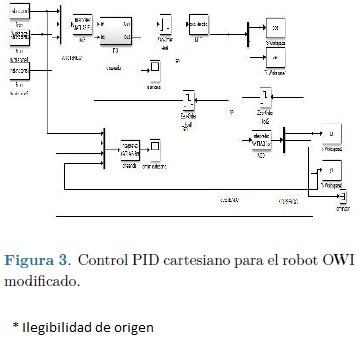
El controlador PID cartesiano toma como señal de entrada una coordenada definida en el espacio cartesiano (x, y, z), la cual es transformada en una consigna articular por medio del modelo geométrico inverso (MGI). Es decir la señal de tres dimensiones de la consigna cartesiana se convertirá en una consigna articular (q1, q2, q3, q4, q5), valores para cada una de las articulaciones del robot OWI modificado. Igualmente esta estrategia de control debe involucrar el modelo geométrico directo (MGD), ya que las señales que entrega el robot son articulares y deben transformarse en señales cartesianas para ser comparadas con las consignas iniciales.
]]> La Figura 4 muestra el error cartesiano obtenido con una consigna triangular, donde el aspecto importante para observar el comportamiento del controlador es el cambio de dirección en uno de los vértices del triángulo. Se observa el seguimiento bastante preciso que hace el PID al momento de cambiar la dirección, obteniéndose un error de máximo 2.3x10-5 metros (decenas de micras), mostrado en la Figura 5.

Por último se retiró el control de interruptores originales que controlaban el brazo de forma manual, para ser remplazado por una tarjeta Arduino mega 2560, donde se embeberá el código de control. Esta tarjeta cuenta con 54 pines de entrada y salida digitales, de los cuales 14 pines cuentan con PWM, 16 pines de entrada análoga, y 24 pines de entrada y salida digital. En la implementación de este proyecto se utilizaron 6 de los pines con PWM, uno por cada motor, para el control de velocidad de estos. Se emplearon además 6 pines para los sensores de posición, y 6 pines para las salidas digitales que controlarán la posición de los motores. La ventaja más importante de esta tarjeta es que se pude embeber código directamente desde Matlab/Simulink con la herramienta Arduino I/O, lo que permite que el programa embebido sea, ejecutado sin tener conexión nuevamente con Matlab/Simulink. De otra parte para manejar la potencia de los motores se utiliza la tarjeta Arduino Motor Shield.
Se elaboró una maqueta para realizar las pruebas del sistema, la cual tiene como base una lámina de acrílico de 5 mm, material escogido por ser radio lúcido en imágenes de tomografía computarizada. En esta lámina se fijó una porción de columna y un indicador esférico el cual sirve como punto de referencia para la base del robot dentro de la imagen.
La maqueta no pudo ser introducida con el brazo robótico al tomógrafo, debido a que las partes metálicas generan artefactos llamados streaking [13], que por su alta densidad, superan el umbral para el adecuado procesamiento de los datos, dando lugar a imágenes con destellos.
La maqueta es llevada a un tomógrafo General Electric, modelo CTE Dual, del Centro de Imágenes de Occidente, de la ciudad de Popayán, Colombia. La maqueta contiene una porción de columna real compuesta por 5 vértebras lumbares, 2 torácicas y el sacro. La siguiente figura 6 muestra la maqueta y el indicador de referencia para la base del robot.
]]>
Una vez obtenidas las imágenes, en el equipo de tomografía se instala el robot con su respectivo controlador, en el lugar exacto donde se encontraba el indicador esférico, como se muestra en la figura 7.

Software de control
El software diseñado lleva por nombre IBA (Ingeniería Biomédica Aplicada). El programa se desarrolló en VTK (motor gráfico de código abierto) [14], y es compilado en C++ sobre la plataforma Visual Studio 2010. La interfaz de usuario como íconos, botones, y ventanas fueron desarrollados en Qt (software de código abierto) [15]. Las imágenes empleadas se encuentran en formato Dicom (Digital Imaging and Communication in Medicine). Este formato es el estándar reconocido mundialmente para el intercambio de imágenes médicas, diseñado para la visualización, almacenamiento, impresión y transmisión de ellas. Un objeto DICOM simple puede contener solamente una imagen, pero esta imagen puede tener múltiples "fotogramas" (frames), permitiendo el almacenamiento de bloques de cine u otros datos con varios fotogramas.
La manera estándar de representar un estudio médico se hace mediante tres cortes ortogonales a saber: axial, sagital y coronal. El corte axial es perpendicular al eje inferior-superior, el plano sagital es perpendicular al eje izquierda-derecha y el plano coronal es perpendicular al eje anterior-posterior. La Figura 8 presenta estos cortes realizados a la maqueta del proyecto.
La librería para controlar el desplazamiento y recorrido de las imágenes para la navegación es Vtk lmage Plane Widget. Este widget puede ser usado para orientar y posicionar una imagen en un plano finito, utilizando cortes de la imagen en los tres planos como se muestra en la Figura 9.
]]>
En esta imagen se empleó la herramienta de coordenadas del Plane Widget de VTK con la cual se pueden visualizar las coordenadas en x, y, z de cualquier punto de la imagen reconstruida en sus diferentes planos. Los valores visualizados se encuentran expresados en milímetros en la parte inferior izquierda de la imagen. Esta información permite ubicar la base del robot y el punto donde se desea que se desplace la punta del robot donde, lugar donde se encuentra un pequeño cilindro que sirve como guía para el instrumental.
El punto de origen en la imagen donde se encuentran las coordenadas (0, 0, 0), está ubicado en un vórtice de la imagen (Figura 10), mostrándose en color amarillo.

Para determinar correctamente las coordenadas cartesianas que serán enviadas al robot, se toman los dos puntos interiormente mencionados y se restan matemáticamente, lo que origina un nuevo punto que tiene como punto de origen la base del robot con la coordenada deseada para que el robot se positions A continuación se muestra un ejemplo de una toma de datos con el fin de verificar el cambio de origen.
• Coordenada de la base del robot A = (255, 229, 8)
• Coordenada donde se desea ubicar el robot B = (240, 288, 141)
Realizando la diferencia aritmética, entre los dos puntos se obtienen las coordenadas reales en donde se desea posicionar el robot en la maqueta.
]]>B - A = (-15, 59,133)
Para verificar gráficamente se ingresan los datos al software GeoGebra [16] como se muestra en la Figura 11.

En donde en el punto C se encuentra la coordenada deseada con respecto a la base robot en la imagen.
El software IBA integra la visualización de imágenes Dicom en sus diferentes planos con la capacidad de navegar a través de las imágenes, ubicar la lesión, y finalmente posicionar y orientar la guía que estacionará al robot.
El programa permite medir el tamaño de los pedículos y el cuerpo vertebral, lo que brinda la oportunidad de escoger el tornillo más apropiado para la cirugía de fijación de columna.
El procesamiento de imágenes en el software IBA consiste en visualizar y reconstruir las imágenes Dicom en cuatro ventanas, en tres de ellas se visualizan los planos corporales requeridos para el planeamiento de la cirugía, que corresponden a los planos frontal, sagital, y coronal. Las imágenes 2D reconstruidas permiten visualizar las vértebras, desde los diferentes planos.
En la cuarta ventana el software IBA cuenta con un control interactivo de imágenes 3D el cual tiene integrado tres funciones las cuales son "navegación", procesamiento" y "posición". A continuación en la figura 12 se muestra una imagen del software IBA.
]]>RESULTADOS
El software IBA permite visualizar las imágenes tomadas en el tomógrafo computarizado. En total se realizaron 192 cortes del volumen de la maqueta estos cortes permiten realizar la reconstrucción de la imagen en sus diferentes planos. El software está diseñado de tal forma que se pueda seguir en forma vertical los pasos para posicionar el robot. Estos pasos son seis como se muestra en la Figura 13.

Como puede verse en la anterior figura, el primer paso es abrir la imagen Dicom de la imagen a ser procesada.
Para tener una mayor claridad de la imagen se ha incorporado una herramienta que permite que con el clic derecho del mouse y desplazando el puntero de izquierda a derecha o arriba y abajo, se observen cambios de contraste y nitidez en la ventana de la imagen. Esto puede verse en la Figura 14 donde se pueden apreciar los cambios en la imagen con respecto a la Figura 12.

El segundo paso es ubicar el mouse sobre la ventana "Imagen 3D " y con clic sostenido del botón central sobre los planos se recorren las imágenes hasta ubicar el indicador esférico, como se muestra en la Figura 15.
]]>
A continuación se repite el procedimiento anterior se ubica el mouse sobre la ventana 3D con el botón central sostenido se desplazan los planos para ubicar el pedículo en el que se desea posicionar el órgano terminal del robot y donde se insertará el tornillo. Los cambes de las imágenes en los planos se pueden observar en las diferentes ventanas.
Una vez localizado el punto donde se quiere posicionar el órgano terminal del robot se obtienen las coordenadas como se muestra en la Figura 16.

El siguiente paso es orientar el órgano terminal del robot donde se encuentra la guía. La orientación consiste en encontrar dos ángulos en los planos frontal y transversal.
El software IBA cuenta con una, herramienta que permite sobre la imagen del plano graficar el ángulo más indicado para que el tornillo ingrese a través del pedículo sin invadir el canal vertebral como se observa en la Figura 17.


Por último, dando clic; en el botón de "Activar" el robot se mueve a la posición deseada, colocando el anillo en posición para que el cirujano introduzca por él el instrumental para realizar la perforación y a continuación el tornillo. La Figura 19) muestra el sistema completo en su fase de posicionamiento final.

Para verificar el correcto funcionamiento del sistema se empleó un arco en C marca OEC, modelo 9800, propiedad de la Unidad Neurológica Santa Clara, ubicada en los quirófanos de la clínica Saludcoop de la ciudad de Popayán, Colombia. El intensificador de imágenes se emplea en modo fluoroscopia para tomar imágenes continuas de rayos X de la maqueta en tiempo real, lo que permitirá verificar la correcta posición y orientación del sistema.
Una vez obtenidas las imágenes en el arco en C, estas son grabadas en medio digital en formato bmp, propio del equipo. Estas imágenes se cargaron al software Geogebra, con cuyas herramientas se midieron los ángulos en que se encontraba posicionada la guía. Estos ángulos se comparan con los obtenidos en el software IBA, el error angular es la diferencia entre estos dos valores.
En el plano transversal el ángulo de referencia calculado en el software IBA es de 71.1 grados, y el medido en la imagen obtenida en el arco en C, es 71.86, con una error aproximado de 0.76 grados, como se observa en la Figura 20.
]]>
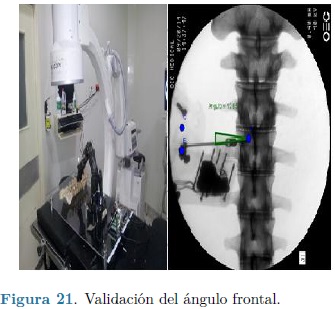
Por otra parte en el plano frontal el ángulo calculado en el software IBA es de 12 grados, el obtenido en el arco en C es de 12.85 grados, con un error aproximado de 0.85 grados como se observa en la Figura 21.
DISCUSIÓN
Las salas de cirugía son unidades médicas de alto riesgo en donde la prioridad es la seguridad del paciente. La cirugía asistida por robots es un procedimiento de alto riesgo [17], en donde se puede generar situaciones que comprometan la seguridad del paciente [18].
Actualmente no existen normas de seguridad para los robots quirúrgicos pero existen normas para los robots industriales como la ISO 10218: 2011 que presenta los requisitos de seguridad para los robots industriales. En la parte medica está la ISO 13485: 2003, norma en la cual se establecen los requisitos de gestión de calidad para dispositivos médicos; y en la ISO 14971: 2012 se presenta la aplicación del sistema de gestión de riesgos para dispositivos médicos, lo cual implica la seguridad para la interacción robots-humanos [19].
La seguridad de un robot quirúrgico está en su diseño el cual es basado en la descripción de un procedimiento quirúrgico y en conocimientos técnicos y médicos de la cirugía. Este tipo de procedimientos requiere de una estandarización, control y seguimiento para estos sistemas de alto riesgo. Uno de los modelos más empleados es el Healthcare Failure Mode and Effects Analysis (HFMEA), que es una herramienta de evaluación en donde se identifican las posibles causas de error del sistema mediante diagramas de flujo. Los errores se priorizan según gravedad, frecuencia, y probabilidad, con las medidas de control existentes, con la toma de medidas para cada caso, y con el tipo de cirugía robótica a realizar [20].
]]> CONCLUSIONES
Este artículo presentó un prototipo funcional de robot para asistir en una cirugía de fijación de columna, con el fin de ayudar al cirujano en la correcta ubicación y orientación de una guía para la inserción de los tornillos en el cuerpo vertebral. Se utilizó un sencillo robot comercial de bajo costo, el cual fue modificado con el fin de proveerle un grado de libertad adicional, para un total de cinco grados de libertad. Se utilizó un tomógrafo computarizado el cual obtiene imágenes en formato Dicom de una columna vertebral real. El software desarrollado, llamado IBA, permite mostrar en pantalla la imagen en tres dimensiones de las vértebras de la maqueta realizada, pudiéndose definir el punto inicial y el punto final de la inserción del tornillo transpedicular. Realizando sencillos ajustes en el software es posible que el robot modificado, el cual está ubicado y referenciado al lado de la columna vertebral, se mueva frente a la vértebra en cuestión, mostrando al cirujano por medio de un anillo fijado a su órgano terminal, la posición y orientación guía para que él pueda introducir el tornillo.
Los resultados muestran un error angular bastante pequeño. Aunque se utilizó para este trabajo un robot comercial muy simple y de solo cinco grados de libertad, los resultados muestran que es posible construir un sistema más completo con el cual podrían iniciarse pruebas en el quirófano. El obtener una herramienta funcional de este tipo permitiría reducir considerablemente la posibilidad de errores al momento de introducir los tornillos transpediculares en cirugía de fijación de columna.
Trabajos futuros explorarán el sistema con un robot más robusto y de seis grados de libertad, así como su prueba en las operaciones de fijación de columna más sencillas.
REFERENCIAS
1. P. Gomez, "Surgical robotics: Reviewing the past, analyzing the present, imagining the future," Robotics and Computer-Integrated Manufacturing, vol. 27, no. 1, pp. 261-266, 2011. [ Links ]
2. R. Autorino, J. Kaouk, J. Stolzenburg, I. Gill, A. Mottrie, A. Tewari, J. Cadeddu, "Current status and future directions of robotic single-site surgery: a systematic review," European Urology, vol. 63, no. 2, pp. 266-280, 2013. [ Links ]
]]>3. H. Herrera, R. Moreno, R. González, E. Barcena, J. Gracia, "Evaluación de la columna lumbar posquirúrgica" Radiología, vol. 55, no. 1, pp. 12-23, 2013. [ Links ]
4. B. Upendra, D. Meena, B. Chowdhury, A. Ahmad, A. Jayaswal, "Outcome-based classification for assessment of thoracic pedicular screw placement," Spine, vol. 33, no. 4, 384-90, 2008. [ Links ]
5. V. García, J. Burgos, T. Barrios, E. Sierra, L. Anton, G. Beorlegui, "Mal posicionamiento de tornillos pediculares lumbares que producen radioculalgia pos operatoria con la estimulación neurofisiológica intra operatoria normal," Columna, vol. 12, no. 1, pp. 322-325, 2013. [ Links ]
6. O. Hadomi, "Robotics spine surgery by Mazor Robotics," 2012. [ Links ]
7. S. Kostrzewski, J. Duff, C. Baur, "Robotic system for cervical spine surgery," Int. J. Med. Robot, vol. 8, no. 1, pp. 184-190, 2012. [ Links ]
]]>8. F. Sahin, P. Kachroo, Practical and Experimental Robotics. CRC Press (Boca Raton), 2008. [ Links ]
9. E. Dombre, W. Khalil, Modeling, Performance Analysis and Control of Robot Manipulators. Wiley (London), 2010. [ Links ]
10. W. Khalil, D. Creusot, "SYMORO+: a system for the symbolic modelling of robots," Robotica, vol. 15, no. 1, pp. 153-161, 1997. [ Links ]
11. A. Vivas, Diseño y Control de Robots Industriales Teoría y Práctica. Elaleph (Buenos Aires), 2010. [ Links ]
12. J. Lenarcic, T. Bajd, M. Stanisic, Robot Mechanisms (Intelligent Systems, Control and Automation: Science and Engineering). Springer (New York), 2014. [ Links ]
]]>13. The VTK User's Guide 11th edition Kitwatre Inc, 2012. [ Links ]
14. Qt Framework, Página principal: http://qt.nokia.com/products/ online accessed 08 Oct 2014.
15. M. Lee, S. Kim, S. Lee, "Overcoming artifacts from metallic orthopedic implants at high-field-strength MR imaging and multi-detector CT," Radiographics, vol. 8, no. 1, pp. 791-803, 2007. [ Links ]
16. Hohenwater, "GeoGebra" online accessed 2014. [ Links ]
17. E. Kananzides, "Surgical and interventional Robotics Core concepts, Tecnology and Desing," IEEE Robotics and automation Magazine, pp. 122-130, 2008. [ Links ]
18. K. Ahmed, S. Sharma, S. Khan, "Revisiting patient safety for innovative urological surgery," Trends in Urology and Men's Healt, vol. 3, no. 1, pp. 1722, 2012. [ Links ]
19. Q. Hoang, J. Guiochet, D. Powell, M. Kaaniche, "Human-Robotic interactions: model based risk analysis and safety case construction," Embedded Real Time Software and Systems. ERTS, 2012. [ Links ]
20. J. DeRosier, E. Stalhandske, J. Bagian, T. Nudell, "Using health care Failure Model and Effect Analysis the VA National Center for Patient Safety's prospective risk analysis system," Jt Comm J Qual Improv, vol. 28, no. 1, pp. 248-267, 2002. [ Links ]
]]>