Robots modulares para cirugía mínimamente invasiva
Modular Robots for Minimally Invasive Surgery
A.H. Vilchis-González, J.C. Ávila-Vilchis, R.G. Estrada-Flores, R. Martínez-Méndez, O. Portillo-Rodríguez, M. Romero-Huertas
Facultad de Ingeniería Universidad Autónoma del Estado de México.
]]>Correspondencia:
Adriana H. Vilchis González
Correo electrónico: hvigady@hotmail.com
Fecha de recepción: 11 de Septiembre de 2013.
Fecha de aceptación: 11 de Febrero de 2014.
RESUMEN
Este artículo se enfoca en las consideraciones que se deben tomar en cuenta sobre el diseño de robots modulares que permitan auxiliar al médico en intervenciones de CMI (Cirugía Mínimamente Invasiva). Se presenta el estado del arte de los sistemas robóticos modulares tanto re-configurables como auto re-configurables, así como los dispositivos y materiales quirúrgicos usados en cirugía de mínima invasión con el fin de tomarlos como referencia en las propuestas de diseño, considerando la normatividad para dispositivos médicos y con un enfoque de diseño para dispositivos de ablación durante laparoscopías abdominales.
]]> Palabras clave: robot quirúrgico, cirugía mínimamente invasiva.
ABSTRACT
This article concerns the aspects that have to be taken into account for mechanical design of modular robots to be used as a surgical tool in MIS (Minimally Invasive Surgery) interventions. For this purpose, several works concerning modular, reconfigurable and autoreconfigurable robots are presented. Materials and surgical devices that are used for MIS are taken into account as a reference for modular and reconfigurable robots design considering regulations on medical devices and technology. The information presented in this document is oriented to abdominal ablations in laparoscopic interventions.
Keywords: surgical robot, minimally invasive surgery.
INTRODUCCIÓN
La CMI (Cirugía Mínimamente Invasiva) es un enfoque para realizar tareas quirúrgicas minimizando el daño causado al paciente y que ha tenido un crecimiento importante desde mediados de los años 90 [1]. Este tipo de cirugía consiste en la realización de intervenciones quirúrgicas mediante pequeñas incisiones en el cuerpo de un paciente, lo que presenta diferentes ventajas con respecto a la cirugía convencional abierta; como por ejemplo, un menor daño quirúrgico al paciente y por consecuencia una recuperación más rápida con una posible reducción en los gastos y tiempos de hospitalización [1]. Los procedimientos de CMI evolucionan buscando minimizar el daño al paciente, como en el caso de la laparoscopía convencional donde, en general, se practican varios orificios en la pared abdominal del paciente para insertar trocares que permiten al cirujano introducir instrumentos quirúrgicos dentro de la cavidad abdominal.
Para optimizar procedimientos laparoscópicos se ha propuesto reducir el número de orificios quirúrgicos y practicar sólo uno que coincida con la cicatriz umbilical [1], reduciendo el grado de invasión de la cirugía y procurando respetar aspectos estéticos corporales. Para esto, el orificio único se utiliza con el objetivo de introducir una cámara e instrumental médico que se despliega en el interior del abdomen para efectuar alguna tarea quirúrgica. En este contexto, el propósito de la CMI es el de utilizar orificios cada vez más pequeños para lograr el acceso al interior del cuerpo humano, de tal forma que se han utilizado orificios para colocar trocares de hasta 2.7 mm de diámetro.
En sus inicios, la CMI parecía estar identificada como una cirugía estándar, a la cual todos los procedimientos quirúrgicos migrarían.
]]> En una década, varios procedimientos que se realizaban mediante cirugía tradicional lograron realizarse usando CMI; sin embargo, la cirugía laparoscópica se ha enfocado a algunos procedimientos simples realizados por la mayoría de los cirujanos o a procedimientos más avanzados realizados por unos pocos médicos especializados en esta área. Algunos de los problemas abiertos en la cirugía laparoscópica son: la falta de visión en tres dimensiones, la falta del sentido del tacto por parte del cirujano, la disminución en el uso de su destreza al usar dispositivos de manipulación debido al reducido número de movimientos independientes (grados de libertad) que posee el instrumental y las limitaciones de las interfaces hombre-máquina [1].Se han identificado dos enfoques para la solución de los problemas que enfrenta la cirugía laparoscópica: aquellos que surgen de requerimientos (problemas para los que hay solución) y que proporcionan soluciones únicas mediante el uso de computadoras, imágenes, robots y telecomunicaciones y los que surgen de oportunidades como lo son las nuevas tecnologías que pueden proveer respuestas a algunos problemas actuales, pero que principalmente extenderán las capacidades del cirujano a través del uso de avances en genética, sistemas microelectromecánicos (MEMS por sus siglas en inglés), ingeniería de tejidos o nanotecnología, entre otras [2].
Las técnicas de CMI en general y de laparoscopía en particular, han presentado diversas ventajas como incisiones más pequeñas que permiten una recuperación más rápida y beneficios estéticos; sin embargo, para el caso de cirugías complejas, la efectividad de la laparoscopía todavía tiene que ser probada [3]. Esto se presenta por ejemplo cuando se ha planeado por el cirujano hacer una intervención laparoscópica, pero al realizar la cirugía se toma la decisión, debido a la complejidad de la situación, de cambiar a una cirugía abierta. La razón de este tipo de decisiones se basa en el hecho de que los instrumentales laparoscópicos comunes no cuentan con suficiente destreza (grados de libertad) ni con sistemas de retroalimentación de fuerza, por lo que el cirujano ve limitado su uso.
Los robots quirúrgicos se presentan como una alternativa de solución a estos problemas ya que pretenden extender las capacidades del cirujano mediante su incorporación en entornos quirúrgicos. Las tecnologías de la información han permitido la transición de la cirugía laparoscópica a la siguiente generación de CMI, mediante la incorporación de diversos aspectos como son la visualización tridimensional, nuevas técnicas de fusión de información para mejorar la visión, la retroalimentación de fuerza para mejorar el sentido del tacto, la percepción de la escala, la reducción de temblores, la incorporación de redundancia espacial en los instrumentales y, finalmente, las interfaces más intuitivas hombre-máquina.
La realidad virtual permite realizar una planeación pre-operatoria y el entrenamiento de médicos. Todas estas tecnologías pueden incorporarse a sistemas asistidos por computadora o controlados por robots, lo que representa un avance en el entorno quirúrgico [2]. El uso de tecnologías robóticas para asistir en cirugía fue descrito conceptualmente en los años 70, pero fue hasta los años 90 cuando se hizo posible. Las características intrínsecas de los robots tales como la alta precisión, la repetitividad y la durabilidad, los hacen buenos asistentes para los médicos ya que permiten un control confiable, por lo que actualmente existen aplicaciones comerciales de éstos en todas las áreas quirúrgicas, principalmente en gastroenterología, neurocirugía y ortopedia, entre otras especialidades, siendo el sistema Robótico Da Vinci [4] el más avanzado y utilizado en cirugía robótica. Aunque este sistema ofrece varias ventajas, incluyendo visualización en tres dimensiones del campo quirúrgico, manipulación intuitiva de los instrumentos y destreza mejorada, también presenta algunas desventajas [5][6] ya que es un sistema caro y de grandes dimensiones, llegando a ocupar mucho espacio dentro del quirófano, pudiendo representar un obstáculo en ciertos casos como el de eventos de colapso cardiopulmonar, por ejemplo [7]; además, muchas operaciones abdominales requieren ser realizadas en al menos dos cuadrantes con estados variables de inclinación del paciente, lo que requiere de repetidos acoplamientos y desacoplamientos del robot y, por consecuencia, de un incremento significativo en la duracion del procedimiento [3].
La miniaturización de los sistemas robóticos se ha propuesto en [3] como una de las soluciones a los problemas antes mencionados. En las primeras fases, la robótica médica estaba orientada a intervenciones de gran escala, pero la tendencia se ha dirigido al desarrollo de dispositivos pequeños [8].
Dos técnicas particulares de la CMI han atraído el interés de médicos e investigadores. La primera es la cirugía endoscópica transluminal a través de orificios naturales o NOTES (Natural Orifice Translumenal Endoscopic Surgery), donde un endoscopio flexible es introducido en el cuerpo del paciente a través de un orificio natural como la cavidad oral, la vagina, la uretra o el ano y posteriormente se practica una incisión interna en el fondo de la cavidad correspondiente. Este procedimiento no deja cicatrices externas y permite una rápida recuperación, comparada con procedimientos de cirugía laparoscópica convencional. La segunda técnica es la relacionada con cirugía a través de una única incisión externa o SPA (Single Port Access), donde un trocar es introducido a través de la cicatriz umbilical y por el cual todos los instrumentos deben ser introducidos a la cavidad abdominal. Esta técnica es menos invasiva que una laparoscopía convencional y por lo tanto presenta un menor tiempo de recuperación del paciente [9].
Los instrumentos utilizados para las dos técnicas mencionadas anteriormente son específicos para cada una de ellas y difieren de los utilizados en intervenciones de laparoscopía convencional. Existen diversos equipos que trabajan en el diseño de robots en función del enfoque que se desee utilizar para las intervenciones y que pueden consultarse en [10]. El contexto que se presenta en la siguiente sección corresponde, en particular, a la laparoscopía abdominal donde se introduce un único sistema a través del trocar instalado en la cicatriz umbilical.
Una descripción del procedimiento para efectuar ablaciones durante laparoscopías abdominales es presentada en la siguiente sección, donde se identifican las tareas que un robot quirúrgico puede realizar. La sección de robots modulares está dedicada a presentar algunos desarrollos de robots intracorpóreos. Posteriormente se presentan las consideraciones que, sobre materiales y dispositivos quirúrgicos, deben ser tomadas en cuenta al realizar una propuesta de diseño de un robot quirúrgico. En la sección de normatividad se presentan algunas consideraciones relevantes para el diseño de un dispositivo robótico de aplicaciones médicas. Posteriormente se establecen algunas recomendaciones prácticas que deben tomarse en cuenta para el diseño de robots quirúrgicos. Finalmente, las conclusiones de este trabajo se presentan en la última sección del artículo.
]]> ABLACIONES EN LAPAROSCOPIA ABDOMINAL
En esta sección se define lo que es una ablación laparoscópica y se ilustran los pasos que pudieran ser realizados en esta operación por un sistema robotizado que auxilie al cirujano.
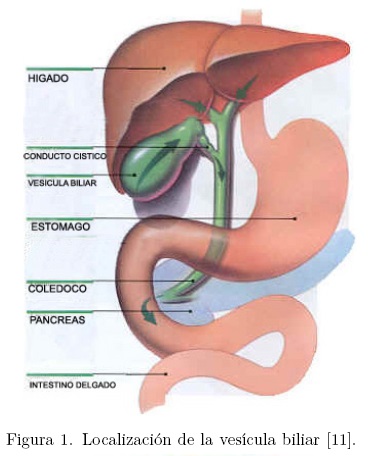
Una ablación laparoscópica es la extirpación de una parte del cuerpo por sección quirúrgica usando laparoscopía. La colecistectomía es un procedimiento realizado para extirpar la vesícula biliar con una patología (órgano con forma de pera situado en la cara inferior del lóbulo hepático derecho, ver Figura 1). Esta tarea ha sido seleccionada como aquella en la que un robot pudiera apoyar al cirujano y se describe a continuación.
Los procedimientos más comunes para realizar una colecistectomía son la cirugía abierta tradicional, la cirugía laparoscópica y la colecistectomía transvaginal usando un endoscopio con instrumentos especiales. En el primer caso el cirujano realiza una incisión en la parte superior derecha del abdomen (región subcostal derecha) como se ilustra en la Figura 2; la vesícula es separada de las estructuras que la rodean (hígado, arterias y conductos biliares); el cirujano explora los conductos para descartar la presencia de cálculos y por último revisa toda el área para descartar la presencia de alguna otra patología. Una vez extirpada la vesícula, la incisión es cerrada mediante suturas o grapas.

Durante la colecistectomía laparoscópica, el cirujano usa instrumentos punzocortantes denominados trocares para hacer tres, cuatro o hasta cinco pequeñas incisiones en el abdomen superior, como se muestra en la Figura 3.
]]>
Se inserta una aguja de Veres a través de la incisión umbilical y se inyecta bióxido de carbono para insuflar el abdomen y permitir una mejor visibilidad y maniobrabilidad dentro de éste (ver Figura 4).

El laparoscopio se introduce por uno de los puertos. Las imágenes recibidas por éste son magnificadas y proyectadas en un monitor. Se insertan instrumentos quirúrgicos a través de los puertos que serán usados para sujetar la vesícula, disecarla (cortarla) y engrapar sus conductos discados y cortar tanto la arteria principal como el conducto cístico. La vesícula es entonces removida por uno de los puertos como se muestra en la Figura 5. Las imágenes son observadas con mucho cuidado y detenimiento por el cirujano para identificar cualquier hemorragia. Antes de retirar el laparoscopio, se examina nuevamente el abdomen verificando que no existan complicaciones. Las incisiones son cerradas con suturas o grapas.

Durante cualquiera de los dos tipos de cirugía mencionados previamente, el cirujano puede elegir colocar un pequeño tubo flexible en el área donde se extirpó la vesícula, conectando el interior del abdomen con una bolsa colocada en el exterior del cuerpo del paciente con la finalidad de drenar los fluidos que podrían producirse durante las primeras horas o los primeros días posteriores a la operación.
En la colecistectomía transvaginal híbrida se realiza el procedimiento a través de una única incisión en el abdomen de cinco milímetros localizada en el ombligo y un segundo acceso se realiza a través del fondo de la vagina introduciendo por ahí un endoscopio flexible. La disección se realiza usando instrumentos laparoscópicos (tijeras, pinzas, disectores) colocados a través del puerto laparoscópico, una pinza flexible puede ser usada en el endoscopio para ayudar a la retracción de la vesícula [15].
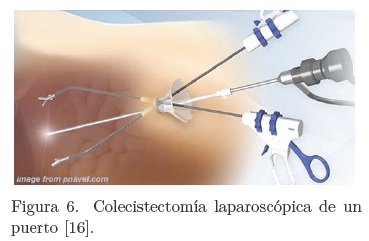
La colecistectomía laparoscópica de un solo puerto es la extirpación de la vesícula biliar mediante cirugía laparoscópica practicada a través de un puerto único por incisión en la cicatriz umbilical. La Figura 6 muestra la disposición del instrumental usado en este tipo de operación.
]]>
La Figura 7a ilustra un dispositivo conocido como mono-puerto que se coloca en la incisión practicada en la cicatriz umbilical y por donde se pueden introducir los instrumentales requeridos durante la cirugía que son básicamente el laparoscopio, el gancho y las pinzas graspers, mostrados en la Figura 7b.

La colecistectomía laparoscópica de un solo puerto es seleccionada para ilustrar el uso de sistemas robóticos, en la Tabla 1 se muestran las etapas en las que, de manera general, dicha intervención se realiza y se identifican aquellas en las que puede intervenir un robot. Del puerto es la extirpación de la vesícula biliar procedimiento que se muestra en la Tabla 1, se mediante cirugía laparoscópica practicada a pudiera utilizar un robot modular reconfigurable través de un puerto único por incisión en la en las tareas asociadas con los pasos del 7 al 12, por lo que las tareas en las que pudiera asistir disposición del instrumental usado en este tipo dicho robot son la disección, el engrapado, la sujeción y el corte.
En la siguiente sección, se presentan diferentes desarrollos de dispositivos robóticos orientados para auxiliar a los cirujanos en diferentes intervenciones quirúrgicas.
ROBOTS MODULARES
Los robots modulares son sistemas construidos a partir de un conjunto de componentes estandarizados o bloques [18] que permiten la realización de diferentes configuraciones ya que son capaces de adaptar su forma y funciones a ambientes y demandas cambiantes [19]. La reconfiguración de estos robots ofrece múltiples combinaciones en el número de grados de libertad que pueden ser utilizadas para optimizar las tareas requeridas [20] [21]; sin embargo, estos sistemas se han empleado preferentemente para aplicaciones diferentes a las quirúrgicas como en [21] y [22].
]]> Es importante mencionar que diversos equipos de investigadores trabajan en el desarrollo de robots reconfigurables aplicados en medicina, como el caso de los robots intracorpóreos o dispositivos que se introducen en el cuerpo del paciente, pero que presentan conexiones limitadas con el mundo exterior. Los primeros desarrollos consideran cámaras intra-abdominales y dispositivos robóticos de imagen del tracto gastrointestinal, así como otros desarrollos para aplicación en Neurocirugía. Algunos trabajos relacionados con las aplicaciones médicas se presentan a continuación.En [23] se propone el diseño de brazos articulados reducidos que pueden ser usados como instrumentos quirúrgicos en cirugías de corazón practicadas en pacientes adultos. En este caso los brazos son introducidos a través de un trocar situado entre dos costillas (ver Figura 8).

En la Universidad de Nebraska se desarrollaron dos prototipos de robots intraabdominales. El primero se ilustra en la Figura 9 y representa una cámara cilíndrica montada en una base de tres patas que puede rotar 360o y cambiar su ángulo en el plano vertical a 45o para proveer un rango de visión de todo el abdomen [24].
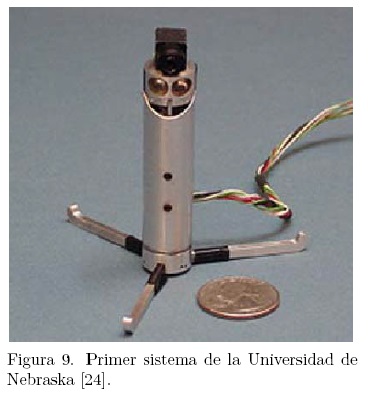
Este dispositivo fue probado durante una colecistectomía laparoscópica practicada sobe un cerdo, comprobándose la utilidad de la cámara al proveer imágenes de trocares que fueron insertados a través de la piel y de los dispositivos que se introdujeron al abdomen por estos puertos. El segundo prototipo cuenta con movilidad [25], tiene dos ruedas cilíndricas con cuerda espiral y una cámara miniatura montada en el eje que conecta las ruedas. Las ruedas están diseñadas para moverse a través de tejido deformable sin dañarlo como se ilustra en la Figura 10.

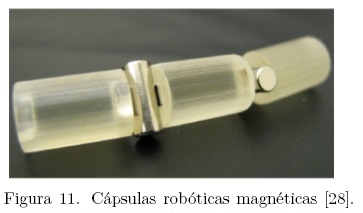
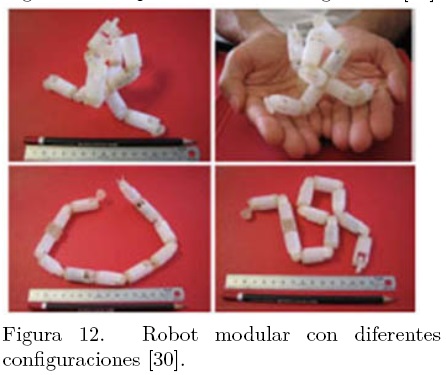
En [27] se han considerado microrobots que mediante uniones magnéticas se autoensamblan en el interior del cuerpo humano, por ejemplo en el tubo digestivo o en el sistema circulatorio, pero no cuentan con las ventajas de la reconfiguración para tareas quirúrgicas a escalas diferentes como la extirpación de tejidos tumorales, la sutura o la separación de órganos para exploración, diagnóstico o intervención y en [28] (ver Figura 11) y [29] (ver Figura 12) se propone que el paciente trague varias cápsulas robóticas con funciones individuales tales como el controlador o los fórceps de muestreo de tejido. Las cápsulas pueden ser tragadas una tras otra y auto-ensamblarse en el estómago para formar un sistema más grande y con mayores capacidades. Se presenta un sistema magnético para polarizar los componentes individuales con el propósito de que se arreglen en una secuencia predecible.
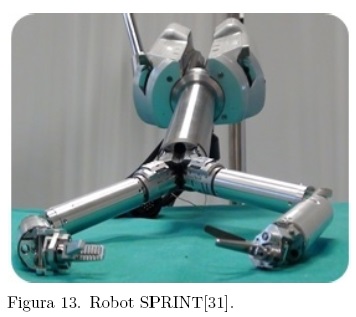
En [31] se presenta el diseño y la fabricación de un robot de puerto único para laparoscopía (robot SPRINT). El sistema es teleoperado y presenta un alto grado de destreza con la capacidad de reproducir el movimiento de las manos de un cirujano que controla al sistema a través de una interface maestra. El robot está constituido de dos brazos con seis grados de libertad para ser insertado y retirado a través de un puerto de 30 mm de diámetro. El sistema está diseñado para permitir la inserción de otras herramientas laparoscópicas. Los actuadores son motores de corriente continua sin escobillas, cuatro de ellos embarcados y dos externos. El desarrollo considera el diseño de mecanismos compactos para accionar las articulaciones del dispositivo debido a restricciones generadas por las dimensiones mayores del mismo y por los requerimientos de potencia (ver Figura 13).
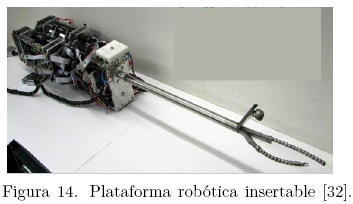
En [32] se presenta el diseño de una plataforma robótica insertable que integra una cámara de estereovisión y herramientas quirúrgicas para cirugías de único puerto (SPA). El robot está diseñado para ser insertado a través de puertos de 15 mm de diámetro y su diseño está basado en los robots de tipo serpiente para cubrir un espacio de trabajo de 50×50×50 mm3 como lo requieren los procedimientos de colecistectomía. La Figura 14 ilustra el dispositivo comentado.
]]>
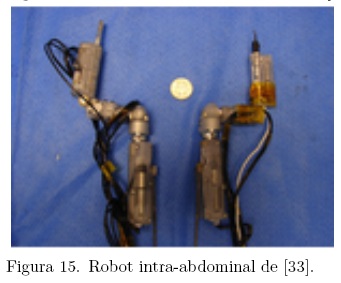
En la Figura 15 se presenta un robot para realizar tareas quirúrgicas intra-abdominales específicas dentro de la cavidad peritoneal, constituido por dos brazos conectados a un cuerpo central [33]. El diseño permite al cirujano realizar tareas como sujeción, manipulación, cauterización y sutura intracorpórea. El espacio de trabajo del robot es un hueco hemisférico de 75 mm de radio interior y 205 mm de radio exterior. El alto índice de destreza fue demostrado al realizar, en un modelo porcino, una colecistectomía, una colectomía parcial, una exploración abdominal y una sutura intracorpórea.
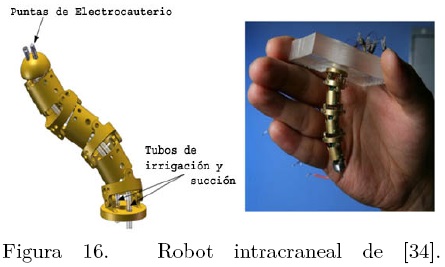
El robot intracraneal para neurocirugía mínimamente invasiva MINIR (Minimally Invasive Neurosurgical Intracranial Robot) de la Universidad de Meryland, Estados Unidos, mostrado en la Figura 16, podría ser utilizado en un ambiente intra-operativo MRI (Magnetic Resonance Imaging) bajo el control directo de un operador humano con información obtenida exclusivamente de imágenes de resonancia magnética que hayan sido actualizadas con cierta frecuencia [34], [35].
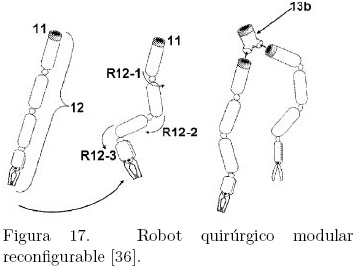
El trabajo registrado en [36] corresponde a una propuesta de robot modular reconfigurable que pudiera ser insertado en la cavidad abdominal a través de un puerto único. La propuesta considera la posibilidad de insertar el dispositivo robótico en forma longitudinal y, una vez en el interior de la cavidad, reconfigurarse en varias ramas que contengan instrumentales diferentes, de acuerdo con los requerimientos de la intervención quirúrgica (ver Figura 17).
]]>
Los dispositivos y materiales quirúrgicos que deben ser considerados para realizar una colecistectomía laparoscópica de un puerto, como requerimientos para el diseño de robots modulares, son discutidos en la siguiente sección.
CONSIDERACIONES SOBRE DISPOSITIVOS Y MATERIALES QUIRÚRGICOS
Durante una colecistectomía laparoscópica se utilizan ciertos instrumentos o dispositivos quirúrgicos como las pinzas de agarre o grasper, el gancho o pinzas de Meriland, la engrapadora y las tijeras o bisturí armónico. La Figura 18 ilustra algunos de los instrumentos mencionados.

Con base en lo presentado previamente, un robot quirúrgico debe permitir al cirujano que lo instale en el interior del abdomen de un paciente pasando por un puerto ubicado en la cicatriz umbilical, que manipule o accione una diversidad de dispositivos quirúrgicos para realizar una colecistectomía laparoscópica de un puerto, que retire la vesícula biliar y que sea extraído sin provocar daños o riesgos de herida o infección al paciente. Por lo anterior, el diseño de dispositivos modulares debe considerar el uso de materiales que no sean dañinos para el paciente.
La selección de los materiales de los cuales son hechos los dispositivos de aplicaciones médicas debe ser parte de las consideraciones de los procesos de diseño y manufactura. Las buenas prácticas de manufactura incluyen la validación del proceso para asegurar que las propiedades del material no estén comprometidas. Cuando el dispositivo en cuestión es aplicado o implantado en el cuerpo se deben considerar tanto los efectos del material en el organismo como los del organismo en el material [37].
Para la construcción de robots de aplicaciones médicas es necesario basar la selección en criterios de biocompatibilidad, de resistencia a ambientes ácidos y alcalinos y de estabilidad térmica a altas temperaturas (hasta 200oC) para asegurar la esterilización. Los siguientes materiales se han considerado por su uso potencial en la fabricación de robot quirúrgicos intracorpóreos.
]]> El PEEK (Victrex polyetheretherquetone) es un termoplástico cristalino que puede operar en un amplio rango de pH, desde ácido sulfúrico al 60% hasta hidróxido de sodio al 40% y a altas temperaturas. También presenta resistencia a solventes orgánicos, reactivos acuosos y comportamiento aceptable en agua caliente a 500oF. Su temperatura de distorsión es de 600oF. De sus propiedades mecánicas resaltan la baja emisión de humo y sus características autoextinguibles; además, exhibe una excelente resistencia a una amplia gama de químicos orgánicos e inorgánicos, por lo que es un material apropiado para aplicaciones médicas, estando disponible en flechas de sección redonda y placas.La familia Bionate® PCU ha sido extensamente probada y es usada en varios implantes de larga duración disponibles comercialmente, incluyendo cables de marcapasos, dispositivos de asistencia ventricular, discos de columna, dispositivos de neuro-estimulación, articulaciones de cadera y rodilla y sistemas de fijación de cadera. Este material no es tóxico, es no-hemolítico, no es genotóxico, no es muta-génico y no es pirogénico. La segunda generación de estos materiales es procesada más fácilmente para aplicaciones de moldeo por inyección, ofrece estabilidad oxidativa mejorada y mayor resistencia que la primera generación.
Algunas resinas del grupo DSM Biomedical se han usado para recubrir catéteres y otros dispositivos quirúrgicos. Las resinas Somos® ofrecen un nuevo enfoque al diseño y procesamiento de dispositivos médicos como la estereolitografía [39].
El Liquid Silicone Rubber (LSR) de la compañía M.R. Mold and Engineering es un material con baja compresión, ciclos de cura rápidos, estabilidad y habilidad para resistir temperaturas extremas de calor y frío, todo lo que lo hace apropiado para la fabricación de partes que requieren de alta calidad. A diferencia de la mayoría de elastómeros termoplásticos, el LSR se mantiene flexible y elástico a 70oF y retiene sus propiedades hasta los 450oF. Se encuentra en una gran variedad de colores y durezas, lo que le permite ser usado en diversas aplicaciones. El conocimiento y experiencia de M.R. Mold and Engineering construyendo moldes de tolerancias cerradas y sin rebabas para LSR, los ha llevado a convertirse en especialistas en el procesamiento de este material, principalmente en moldes de caucho de silicón líquido para aplicaciones médicas [40].
Algunos materiales de los productos MASTERBOND® han sido formulados para aplicaciones médicas como el ensamble de dispositivos electrónicos, las uniones para agujas, los dispositivos para ortopedia o los equipos de diagnóstico [41]. Las formulaciones de MASTERBOND® se emplean en aplicaciones médicas como audífonos, bombas de liberación de medicamentos, desfibriladores, monitores fetales y maternales, oxímetros para punta de dedo y neuroestimuladores.
La siguiente sección aborda los aspectos de normatividad para el diseño de dispositivos médicos que deben ser tomados en cuenta en el diseño de todo robot modular reconfigurable para usos quirúrgicos.
NORMATIVIDAD
Siempre que se diseña alguna máquina, es recomendable apegarse a las normas que rigen el diseño de la misma, ya que éstas toman en cuenta la experiencia de trabajos previos y establecen un marco de referencia que permite enfocarse en los aspectos más significativos que podrían no haber sido previstos por quien concibe el diseño.
Cualquier dispositivo para aplicaciones médicas debe cumplir con las Directivas de los Dispositivos Médicos [42]. Cualquier robot modular reconfigurable de aplicación en cirugías laparoscópicas debe también cumplir con las normas establecidas por AORN (Association of periOperative Registered Nurses).
]]> De acuerdo con las Directivas de los Dispositivos Médicos y el GHTF (The Global Harmonization Task Force) a través del documento SG1/N029R11, un dispositivo médico es cualquier instrumento, aparato, implemento, máquina, artefacto, implante, reactivo in vitro o calibrador, software, material u otro artículo similar o relacionado, destinado por el fabricante para ser usado, solo o en combinación, en seres humanos con uno o más de los propósitos específicos de:• diagnóstico, prevención, monitoreo, tratamiento o alivio de una enfermedad.
• diagnóstico, monitoreo, tratamiento, alivio o compensación de una lesión.
• investigación, remplazo, modificación o soporte de la anatomía o de un proceso fisiológico
• suministro de información para propósitos médicos por medio de exámenes in vitro de muestras derivadas del cuerpo humano y que no alcanzaron sus propósitos originales en el cuerpo humano por medios farmacológicos, inmunológicos o metabólicos, pero que pueden ser asistidos en sus funciones por tales medios.
• apoyo o soporte de la vida
• control de la concepción
• desinfección de dispositivos médicos
Así, todo robot modular reconfigurable como los presentados en este trabajo pueden y deben, por lo anteriormente expuesto, considerarse como dispositivos médico ya que su fin es el de modificar la anatomía del cuerpo humano (extirpación de la vesícula biliar, por ejemplo) para tratar de aliviar una enfermedad, por lo que es posible seguir los lineamientos de diseño y aplicar la normatividad que rige el diseño y funcionamiento de los dispositivos médicos que se encuentran especificados en [37], donde se establece el proceso asociado con las directivas de los dispositivos de aplicaciones médicas como una aproximación de múltiples pasos que involucra las siguientes actividades:
]]>• Analizar el dispositivo para determinar cuál directriz o norma es aplicable.
• Identificar la lista de requerimientos esenciales aplicables.
• Identificar cualquier estándar armonizado.
• Confirmar que el dispositivo cumple los requerimientos esenciales o estándares armonizados y documentar la evidencia.
• Clasificar el dispositivo.
• Decidir sobre el procedimiento de conformidad apropiado.
• Identificar y escoger un cuerpo notificado.
• Obtener las certificaciones de conformidad.
• Aplicar por la marca CE (Comisión Europea).
]]> Este proceso no necesariamente se realiza de manera secuencial; sin embargo, pueden hacerse iteraciones durante el ciclo.Debido a la diversidad de las regulaciones actuales para dispositivos médicos, es necesario apegarse a la legislación común que cubra todos los dispositivos. El software o el dispositivo médico que contenga software debe estar sujeto a los requerimientos de la Directiva de Dispositivos Médicos Implantables Activos. Existen tres Directivas consideradas para cubrir el amplio espectro de dispositivos médicos.
1. Directiva de Dispositivos Médicos Implantables Activos o AIMDR por sus siglas en inglés [43]. Aplica a dispositivos que dependen de una fuente de energía eléctrica o cualquier otra fuente de poder diferente a la generada por el cuerpo humano o la gravedad y que se pretende sea introducido parcial o totalmente de manera quirúrgica o médica al cuerpo humano, o por una intervención médica a través de un orificio natural, y el cual se pretende permanezca dentro después del procedimiento. Esta directiva se adoptó en Junio de 1990, se implementó en Enero de 1993 y el período de transición terminó en Enero de 1995.
2. Directiva de dispositivos médicos o MDR por sus siglas en inglés. Aplica a todos los dispositivos médicos y accesorios a excepción de aquellos que estén cubiertos por la Directiva de Dispositivos Médicos Implantables Activos o la Directiva de Dispositivos Médicos de Diagnóstico In Vitro. Se adoptó en Junio de 1993, se implementó en Enero de 1995 y el período de transición terminó en Junio de 1998.
3. Directiva de Dispositivos Médicos de Diagnóstico In Vitro o IVDMDR por sus siglas en inglés. Aplica a cualquier dispositivo médico que sea reactivo, producto de reacción, calibrador, equipo de control, instrumento, equipo o sistema destinado a ser usado in vitro para el examen de muestras provenientes del cuerpo humano con el propósito de brindar información concerniente a un estado fisiológico de salud o enfermedad o anormalidad congénita o para determinar la seguridad o compatibilidad con receptores potenciales.
La responsabilidad legal que las Directivas imponen a los fabricantes de un dispositivo médico requiere que éste cumpla con los Requerimientos Esenciales establecidos en el Anexo I de la Directiva que le aplica tomando en cuenta su propósito. Los requerimientos están clasificados en generales, que aplican siempre, y en particulares, de los cuales sólo aplican algunos según el dispositivo. Los requerimientos generales son:
• El dispositivo debe ser seguro. Cualquier riesgo se acepta con relación a los beneficios ofrecidos por el dispositivo.
• El dispositivo debe estar diseñado de tal manera que el riesgo sea eliminado o al menos se proteja de éste.
]]> • El dispositivo debe trabajar de acuerdo con las especificaciones marcadas por el fabricante.• La seguridad y desempeño debe ser mantenida a lo largo de la vida útil del producto.
• Cualquier efecto secundario debe ser aceptable con relación a los beneficios ofrecidos.
Los requerimientos particulares toman en cuenta los siguientes puntos:
• Propiedades químicas, físicas y biológicas.
• Contaminación infecciosa y microbiana.
• Propiedades de construcción y ambiente.
• Dispositivos con función de medición.
• Protección contra la radiación.
]]> • Requerimientos para dispositivos conectados o equipados con una fuente de energía.• Protección contra riesgos eléctricos.
• Protección contra riesgos mecánicos y térmicos.
• Protección contra riesgos al paciente por fuentes de energía o sustancias.
• Información ofrecida por el fabricante.
La forma más sencilla para asegurar que los Requerimientos Esenciales se cumplan es establecer una lista obtenida del Anexo I de la Directiva aplicable, la cual forma la base del expediente técnico.
La lista de Requerimientos Esenciales incluye los siguientes aspectos:
1. Declaración de requerimientos esenciales.
2. Indicación de la aplicabilidad de los requerimientos esenciales a un dispositivo particular.
]]> 3. Lista de las normas usadas para direccionar los requerimientos esenciales.4. Actividad que direcciona los requerimientos esenciales.
5. Cláusulas en las normas que detallan la prueba aplicable para el requerimiento esencial particular.
6. Indicación de si el dispositivo pasó o no la prueba.
7. Declaración de la localización de los certificados o documentos de la prueba.
Es importante aclarar que una norma armonizada es una norma producida bajo el mandato de la CE por una de las organizaciones europeas de estandarización como la CEN (Comisión Europea de Estandarización) o la CENELEC (Comisión Europea de Estandarización Electrotécnica) que tienen su referencia publicada en el Journal Oficial de Comunidades Europeas.
Los Requerimientos Esenciales están escritos de tal manera que identifiquen el riesgo y establezcan que el dispositivo está diseñado y manufacturado para que el riesgo sea cancelado o minimizado. El detalle técnico para asegurar estos requerimientos se encuentra en los estándares armonizados. El fabricante debe, por lo tanto, identificar los estándares armonizados correspondientes a los Requerimientos Esenciales que aplican a su dispositivo.
Es importante para todo fabricante o desarrollador de dispositivos médicos conocer la forma en que se ha establecido la jerarquía de los estándares respectivos y que se menciona a continuación:
• Estándares horizontales. Son genéricos y cubren los requerimientos fundamentales comunes a todos o a una amplia gama de dispositivos médicos.
• Estándares semihorizontales. Tienen que ver con los requerimientos de un grupo de dispositivos.
• Estándares verticales. Son específicos a un producto y establecen los requerimientos de un dispositivo o de un grupo muy pequeño de dispositivos.
Se debe poner especial atención a los estándares horizontales ya que, por su naturaleza general, aplican a casi todos los dispositivos.
En la siguiente sección se presentan algunas consideraciones prácticas que deben ser tomadas en cuenta al diseñar un sistema robotizado quirúrgico del tipo modular reconfigurable aplicable a colecistectomías laparoscópicas de puerto único.
OTRAS CONSIDERACIONES PARA EL DISEÑO
Algunos aspectos de carácter práctico que debe satisfacer todo dispositivo quirúrgico se mencionan a continuación.
En [10] se define un robot médico "como un sistema complejo que consiste de una estructura mecánica articulada y motorizada, una interface hombre-máquina (HMI por sus siglas en inglés) e instrumentos, componentes electrónicos y un controlador. Estos elementos se integran para realizar una o más tareas médicas en condiciones óptimas de seguridad"; así, se reafirma la importancia que tiene la seguridad del paciente como un factor indispensable a tomar en cuenta durante el diseño de un robot. Otras restricciones deben considerarse, como las mencionadas en [10]:
]]>1. Las funciones que desempeñará el robot dependen de la aplicación médica o del tipo de operación quirúrgica a efectuar, por lo que un robot médico normalmente es diseñado para un tipo específico de tarea u operación quirúrgica.
2. Los componentes utilizándose en la estructura del robot y que estén en contacto con un campo estéril deben poder ser esterilizados o cubiertos con componentes estériles.
3. Los movimientos del robot se ven restringidos o limitados por la presencia de otros dispositivos médicos y del equipo médico.
4. El robot debe poder ser separado del campo quirúrgico de una manera fácil y rápida en caso de complicaciones.
CONCLUSIONES
En este artículo se ha presentado un panorama de los desarrollos que en robótica se han implementado con el propósito de ser aplicados en tareas relacionadas con la Cirugía Mínimamente Invasiva. Estos desarrollos consideran varios campos de aplicación como la neurocirugía o la cirugía abdominal. Para el caso particular de una colecistectomía no complicada de un solo puerto asistida mediante un dispositivo robótico, se identificaron los pasos del procedimiento que pueden ser realizados con la ayuda de un robot quirúrgico. Un procedimiento que puede hacer uso de este enfoque es la toma de biopsias durante laparoscopías diagnósticas abdominales. Finalmente, se presentaron las consideraciones que sobre materiales y dispositivos quirúrgicos se den tomar en cuenta para todo desarrollo de dispositivos robóticos en aplicaciones médicas y se dieron recomendaciones basadas en normatividad y de carácter práctico para ser tomadas en cuenta en el proceso de diseño de nuevos dispositivos robóticos.
AGRADECIMIENTOS
]]> Los autores agradecen a la Universidad Autónoma del Estado de México el apoyo recibido a través del Proyecto Institucional Robot Modular para Cirugía Minimamente Invasiva. Etapa1: Diseño con clave 9016/2013 CAFF.
REFERENCIAS
1. Park S, Bergs RA, Eberhart R, Baker L., Fernandez R. Cadeddu JA. Trocar-less instrumentation for laparoscopy. Annals of Surgery, 2007; 245: 379-384. [ Links ]
2. Cueto García J, Jacobs M, Gagner M. Laparoscopic Surgery, McGraw Hill 2003. [ Links ]
3. Taylor G, Jayne DG. Robotic applications in abdominal surgery: their limitations and future developments. The International Journal of Medical Robotics and Computer Assisted Surgery, 2007, 3: 3-9. [ Links ]
4. Da Vinci Surgery. [En línea] [Citado el: 12 de Noviembre de 2012.]www.davincisurgery.com. [ Links ]
5. Ballantyne, GH. Robotic surgery, telerobotic surgery, telepresence and telementoring, Surgical Endoscopy, 2002, 16: 1389-1402. [ Links ]
6. Sim GG, Yip SKH, Cheng CWS. Equipment and technology in surgical robotics. Journal of Urology, 2006, 24: 128-135. [ Links ]
7. Parr KG, Talamini MA. Anaesthetic implications of the addition of an operative robot for endoscopic surgery: a case report. Journal of Clinical anesthesia, 2002, 14: 228-233. [ Links ]
8. ICRA 2010 Workshop: Meso-Scale Robotics for Medical Interventions. [En línea] [Citado el: 12 de Noviembre de 2012.] http://www.rams.umd.edu/html/ICRA2010Workshop.shtml. [ Links ]
9. Kaloo, Marescaux, Zorron. Natural Orifice Translumenal Endoscopic Surgery: Textbook and Video Atlas, Wiley-Blackwell, 2012. [ Links ]
10. Dombre E, Chaillet N, De Mathelin M. Towards Intracorporeal Robotics. En Jocelyne Troccaz, editor, Medical Robotics, Wiley, 2012: 351-398. [ Links ]
11. Obesity el Salvador. [En línea] [Citado el: 18 de Julio de 2012.] http://www.obesityelsalvador.com/en/es711.html. [ Links ]
12. Enfermería Quirúrgica. [En línea] [Citado el: 18 de Julio de 2012.] http://hannyibarra.blogspot.ca/2012/05/colecistitiscolecistectomia.html. [ Links ]
13. University of Meryland Medical Center . [En línea] [Citado el: 18 de Julio de 2012.] http://umm.edu/health/medical/ency/surgery. [ Links ]
14. Health Pages. [En línea] [Citado el: 21 de Abril de 2013.] http://healthpages.org/surgical-care/cholecystectomy/. [ Links ]
15. ClinicalTrials. [En línea] [Citado el: 14 de Junio de 2009.] http://www.clinicaltrials.gov/ct2/show/study/NCT00815438. [ Links ]
16. Health. [En línea] [Citado el: 24 de Abril de 2013.] https://www.healthtap.com/user_questions/173521-laparoscopic-gallbladderremoval-where-will-my-scars-be. [ Links ]
17. COVIDIEN. [En línea] [Citado el: 14 de Julio de 2012.] http://www.valleylab.com/education/poes/poes_bibliography.html. [ Links ]
18. Jantapremjt P, Austin D. Design of a Modular Self-Reconfigurable Robot. Proceedings of Australian Conference on Robotics and Automation. 2001, 38-43. [ Links ]
19. Murata S, Kurokawa H. Self-Reconfigurable Robots. IEE Robotics and Automation Magazine, 2007, 71-78. [ Links ]
20. Kamumira A, Murata S, Yoshida E, Kurakowa H, Tomita H, Kokaji S. Selfreconfigurable modular robot-experiments on reconfiguration and locomotion. Proceedings of IEEE/RSJ International conference on inteligent Robots and Systems. 2001, 606-612. [ Links ]
21. Yim M, Shen W-M, Salemi B, Rus D, Moll M, Lipson H, et al. Modular selfreconfigurable robot systems, challenges and opportunities for the future. IEEE Robotics and Automation Magazine, 2007, 43-52. [ Links ]
22. Kernbach S, Scholz O, Harada K, Popesku S, Liedke J, Raja H, et al. Multi-Robot Organisms: State of the Art. IEEE International Conference on Robotics and Automation workshop, 2010, 1-10. [ Links ]
23. Cepolina, F. Development of micro-tools for surgical applications. Universita'degli Studi Di Genova, 2005. [ Links ]
24. Oleynikov D, Rentschler M, Hadzialic A, Dumpert J, Platt SR, Farritor S. Miniature robots can assist in laparoscopic cholecystectomy. Surgical Endoscopy, 2005, 19: 473-476. [ Links ]
25. Rentschler ME, Dumpert J, Platt SR, Ahmed SI, Farritor SM, Oleynikov D. Mobile in vivo camera robots provide sole visual feedback for abdominal exploration and cholecystectomy. Surgical Endoscopy, 2006, 20: 135-138. [ Links ]
26. Rentschler ME, Dumpert J, Platt SR, Ahmed SI, Farritor SM, Oleynikov D. Natural orifce surgery with an endoluminal mobile robot. Surgical Endoscopy, 2007, 21: 1212-1215. [ Links ]
27. Abbot JJ, Nagy Z, Beyeler F, Nelson BJ. Robotics in the small, Part I Microrobotics. IEEE Robotics and Automation Magazine, 2007, 92-103. [ Links ]
28. Nagy Z, Fluckiger M, Oung R, Kaliakatsos IK, Hawkes EW, Nelson BJ, et al. Assembling reconfigurable endoluminal surgical systems: opportunities and challenges. International Journal of Biomechatronics and Biomedical Robotics, 2009, 1: 3-16. [ Links ]
29. Harada K, Oetomo D, Susilo E, Menciassi A, Daney D, Merlet JP et al. Assembling reconfigurable endoluminal surgical system. Robotica, 2010, 28: 171-183. [ Links ]
30. Harada K, Susilo E, Menciassi A, Dario P. Wireless reconfigurable modules fo rrobotic endoluminal surgery. Proc. IEEE Int. Conf. on Robotics and Automation, 2009 2699-2704. [ Links ]
31. Piccigallo, Scarfogliero U, Quaglia C, Petroni G, Valdastri P, Menciassi A, et al. Design of a Novel Bimanual Robotic System. IEEE/ASME Transactions on Mechatronics, 2010 15: 871-878. [ Links ]
32. Ding J, Xu K, Goldman R, Allen P, Fowler D, Simaan N. Design, simulation and evaluation of kinematics alternatives for insertable robotic effectors platforms in single port acces surgery. IEEE International Conference on Robotics and Automation, 2010, 1053-1058. [ Links ]
33. Dolghi O, Strabala KW, Wortman TD, Goede MR, Farritor SM. Et al. Miniature in vivo robot for laparoendoscopic single-site surgery. Surgical Endoscopic, 2011, 25: 3453-3458. [ Links ]
34. Mingyen H, Desai JP. Characterization of SMA actuator for application in robotic neurosurgery. Conf. of the IEEE Engineering in Medicine and Biology, 2009, 6856-6859. [ Links ]
35. Pappafotis N, Bejgerowski W, Gullapalli R, Simard JM, Gupta SK, Desai JP. Towards design and fabrication of a miniature MRi-compatible robot for applications in neurosurgery. ASME, 2008. [ Links ]
36. Cinquin P, Avila Vilchis JC, Vilchis González A, Zemiti N. Modular Surgical tool, US Patent 20110130787A1, Marzo 17 2011. [ Links ]
37. Fries R. Reliable Design of Medical Devices. Taylor and Francis, 2005. [ Links ]
38. Aurora HealthCare. [En línea] [Citado el: 12 de Julio de 2012.] http://www.aurorahealthcare.org/yourhealth/healthgate/getcontent.asp?URLhealthgate=%22144250.html%22. [ Links ]
39. DSM Biomedical. [En línea] [Citado el: 12 de Febrero de 2012.] http://www.dsm.com/en_US/cworld/public/markets-products/pages/medical_materials.jsp. [ Links ]
40. M.R. Mold & Engineering Corp. [En línea] [Citado el: 23 de Agosto de 2012.] http://www.mrmold.com/. [ Links ]
41. MasterBond. [En línea] [Citado el: 10 de Marzo de 2012.] http://www.masterbond.com/. [ Links ]
42. World, H. Medical Device Regulations. [En línea] [Citado el: 9 de Enero de 2013.] http://www.who.int/medical_devices/publications/fr/MD_Regulations.pdf. [ Links ]
43. European Medical Device Regulations. [En línea] [Citado el: 9 de Mayo de 2013.] http://www.emergogroup.com/files/EUROPE-CONSOLIDATED-90-385-EEC.pdf. [ Links ]
]]>