Controlador robusto de orden fraccional implementado en el primer tramo del canal principal Imperial de Aragón
Robust fractional order controller implemented in the first pool of the Imperial de Aragón main canal
Raúl Rivas-Pérez
Universidad Politécnica de La Habana "José Antonio Echeverría" Cuba.
*Autor de correspondencia.
]]> Vicente Feliu-Batlle, Fernando Castillo-García, Luis Sánchez-Rodríguez
Antonio Linares-Sáez
ABEIMA, S.A., ABENGOA, España.
Dirección institucional de los autores
Dr. Raúl Rivas–Pérez
Catedrático
Universidad Politécnica de La Habana "José Antonio Echeverría" (CUJAE) ]]>
Departamento de Automática y Computación
Calle 114 # 11901, CUJAE, Marianao
19390 Ciudad de La Habana, Cuba
Teléfono: +53 (7) 2663 285
rivas@electrica.cujae.edu.cu
raul_rivas_perez@yahoo.es
Dr. Vicente Feliu–Batlle
Catedrático
Universidad de Castilla–La Mancha
Escuela Técnica Superior de Ingenieros Industriales ]]>
Campus Universitario s/n
13071 Ciudad Real, España
Teléfono: +34 (92) 6295 364
vicente.feliu@uclm.es
Dr. Fernando Castillo–García
Profesor titular
Universidad de Castilla–La Mancha
Escuela Técnica Superior de Ingenieros Industriales
Campus Universitario s/n
13071 Ciudad Real, España ]]>
Teléfono: +34 (92) 6295 300
fernando.castillo@uclm.es
Dr. Luis Sánchez–Rodríguez
Profesor Titular
Universidad de Castilla–La Mancha
Escuela Universitaria de Ingenieros Técnicos Industriales
Campus Tecnológico de la Antigua Fábrica de Armas s/n
45071 Toledo, España
Teléfono: +34 (90) 2204 100, extensión 3844
luis.sanchez@uclm.es
Recibido: 27/07/10
Aceptado: 07/03/13
]]> Resumen
En el presente trabajo se desarrolla el diseño de un controlador robusto de orden fraccional —el cual se denota como FPI, debido a que constituye una generalización del controlador PI convencional— para el control efectivo de la distribución de agua en canales principales de riego caracterizados por presentar una amplia variación en sus parámetros dinámicos. El interés en esta clase de controladores se justifica por hecho de que la dinámica de los canales principales de riego puede cambiar de forma drástica con las variaciones de sus regímenes de descargas. El controlador FPI desarrollado se programó en un PLC SIMATIC S-7 300 y se implementó en tiempo real en el primer tramo del canal principal Imperial de Aragón, perteneciente a la Confederación Hidrográfica del Ebro, España. Se realizaron experimentos comparativos de funcionamiento en tiempo real del controlador FPI diseñado con otro controlador PI equivalente, en el sentido de exhibir ambos el mismo comportamiento dinámico en lazo cerrado para las especificaciones temporales de la planta nominal. Los resultados obtenidos de estos experimentos demuestran que cuando los parámetros dinámicos del tramo del canal presentan una amplia variación, el controlador FPI exhibe una mayor robustez, lo cual posibilita lograr una mayor velocidad de respuesta, satisfacer de forma operativa las demandas de los usuarios y minimizar las pérdidas por concepto de operación de los recursos hidráulicos disponibles.
Palabras clave: controlador robusto de orden fraccional, implementación práctica en tiempo real, canal principal de riego, parámetros dinámicos variables en el tiempo, uso eficiente de recursos hidráulicos.
Abstract
This paper presents the design of a robust fractional order controller —which we denote as FPI controller since it can be regarded as a generalization of the standard PI controller— for effective control of water distribution in irrigation main canal pools characterized by time-varying dynamical parameters. Interest in such robust fractional order controller is justified by the fact that dynamical parameters of irrigation main canal pools may change drastically according to their operating discharge regimes. The FPI controller designed was installed in a PLC SIMATIC S-7 300, and was real-time implemented in the first pool of the Imperial de Aragon main canal, belonging to the Ebro Hydrographical Confederation (Spain). Real-time experiments were carried out with equivalent —in the sense of exhibiting the same closed loop dynamics for the nominal plant specifications— FPI and PI controllers. They showed a better performance and robustness of the FPI controller when large canal parameters variations were produced, that which facilitates to achieve a bigger speed of response, to satisfy in an operative way the demands of the users, as well as to minimize the losses for concept of operation of the available hydraulic resources.
Keywords: robust fractional order controller, real-time implementation, irrigation main canal, large time-varying dynamical parameters, efficient management of hydraulic resources.
Introducción
La experiencia mundial muestra que una vía importante para aumentar la operatividad y eficiencia en la distribución de agua en los canales principales de riego consiste en la aplicación de sistemas efectivos de control automático y de ayuda a la toma de decisión, los cuales posibilitan la obtención de una estricta correspondencia entre las demandas de los diferentes usuarios y las entregas de este recurso, así como reducir las pérdidas de agua por concepto de operación hasta en un 90% (Clemmens, 2006; Feliu-Batlle et al., 2007; Kovalenko, 1983; Litrico y Fromion, 2009; Rivas-Pérez et al., 2003).
]]> El objetivo fundamental del desarrollo e implementación práctica de sistemas efectivos de control automático de la distribución de agua en los canales principales de riego consiste en satisfacer, a pesar de las incertidumbres, las demandas de agua de los diferentes usuarios, garantizando que los volúmenes de agua extraídos desde la fuente de abasto se correspondan con las necesidades reales, así como que se minimicen las pérdidas por concepto de operación en todo el canal (Buyalski et al., 1991; Kovalenko, 1983; Rivas-Pérez, 1990).Las investigaciones desarrolladas en diferentes canales principales de riego muestran que sus parámetros dinámicos experimentan grandes variaciones cuando sus regímenes de descarga varían en el rango de operación [Qmín, Qmáx] y/o otros parámetros hidráulicos cambian (Corriga et al., 1989; Litrico y Fromion, 2009; Montazar et al., 2005; Rivas-Pérez et al., 2007). Esta clase de canales se conoce como canales con parámetros dinámicos variables en el tiempo (Litrico et al., 2006; Rivas-Pérez et al., 2008b). Por consiguiente, cualquier controlador que se diseñe debe comportarse de forma robusta frente a esta clase de variaciones (Deltour y Sanfilippo, 1998; Feliu-Batlle et al., 2009a; Litrico et al., 2006).
Los controladores PID (proporcional-integral-derivativo) constituyen los controladores más utilizados y expandidos en los sistemas de control automático de la distribución de agua en los canales principales de riego (Buyalski et al., 1991; Clemmens y Schuurmans, 2004; Litrico y Fromion, 2009; Malaterre et al., 1998; Schuurmans et al., 1999). Sin embargo, diferentes estudios muestran que cuando los canales principales de riego presentan parámetros dinámicos variables en el tiempo, la aplicación de controladores PID convencionales no resulta efectiva, originándose un aumento significativo en el tiempo de establecimiento y en el pico máximo de la respuesta temporal del sistema de control, lo cual implica que disminuya la operatividad de la distribución de agua en los canales y, por consiguiente, que aumenten las pérdidas de los recursos hidráulicos disponibles por concepto de operación (Clemmens y Schuurmans, 2004; Litrico y Fromion, 2009; Feliu-Batlle et al., 2009b; Rivas-Pérez et al., 2002; Wahlin, 2004). Es por ello que el desarrollo de controladores robustos de la distribución de agua en canales principales de riego constituye un área de investigación de elevado interés científico-técnico y práctico (Litrico y Fromion, 2009; Wahlin y Clemmens, 2006). El diseño de esta clase de controladores constituye un reto y un problema vital para mejorar la operatividad y eficiencia en la distribución de agua en los canales principales de riego.
En los últimos años, como resultado de una mejor comprensión del cálculo fraccional y de la salida al mercado de un nuevo circuito electrónico conocido como fractal, los operadores de orden fraccional han sido aplicados con resultados satisfactorios en el modelado y control de procesos con comportamiento dinámico complejo, entre los que se encuentran los procesos con parámetros distribuidos (Chen et al., 2004; Machado, 1997; Petras, 2002; Podlubny, 1999a; Vinagre et al., 2000). El cálculo fraccional representa al campo de la matemática que involucra a derivadas e integrales de orden no entero (arbitrario), y constituye una generalización de los conceptos estándar de diferenciación e integración (Podlubny, 1999a).
La aplicación de controladores de orden fraccional (FOC) posibilita ampliar las acciones de control que se pueden desarrollar sobre una variada clase de plantas y/o procesos, así como resolver el problema de la automatización efectiva de procesos, cuyo comportamiento dinámico se describe mediante modelos de orden no entero, sin utilizar aproximaciones (Podlubny, 1999a). Una de las ventajas de esta clase de controladores consiste en que posibilitan el diseño de sistemas de control robusto de plantas, cuyos parámetros dinámicos presentan un amplio rango de variación o de plantas sometidas a grandes perturbaciones (variaciones en la carga), así como de plantas con grandes retardos de tiempo, logrando mantener la estabilidad del sistema de control y presentando una simple implementación práctica (Feliu-Batlle et al., 2009b; Monje et al., 2004; Vinagre et al., 2000).
El comportamiento cualitativo de los controladores PID puede ser mejorado de forma considerable mediante su generalización como controlador de orden fraccional PIαDλ, que involucra un integrador de orden α y un diferenciador de orden λ (Podlubny, 1999b). En consecuencia, los controladores PIαDλ han sido propuestos y han recibido una considerable atención (Barbosa et al., 2004; Castillo et al., 2010; Chen et al., 2006; Djouambi et al., 2005; Leu et al., 2002; Monje et al., 2004; Petras et al., 2003; Podlubny et al., 2002; Rivas-Pérez et al., 2012; Wang et al., 2005).
De manera reciente han sido reportados trabajos relacionados con la aplicación de controladores de orden fraccional en el control de la distribución de agua en canales principales de riego (Castillo-García et al., 2013; Feliu-Batlle et al., 2011, 2009a, 2009b, 2007; Monje et al., 2004; Rivas-Pérez et al., 2008c; Sánchez et al., 2007). Sin embargo, los resultados que se ofrecen en estos trabajos presentan en general un carácter teórico y no se encuentran implementados en canales principales de riego en explotación.
Diferentes autores han reportado que a pesar de que el problema del diseño de sistemas efectivos de control de la distribución de agua en canales principales de riego ha sido objeto de numerosas publicaciones científicas, sólo una pequeña parte de estos controladores ha sido implementada de forma exitosa en la actividad práctica (Clemmens y Schuurmans, 2004; Litrico y Fromion, 2009; Schuurmans et al., 1999; Wahlin y Clemmens, 2006).
El controlador PI (proporcional integral) es el más utilizado en el control de la distribución de agua en los canales principales de riego debido a que es más fácil de ajustar de forma correcta que un PID y a que la parte derivativa del PID es muy sensible al ruido de los sensores, originando problemas de estabilidad del sistema de control (Baume et al., 1999; Burt et al., 1998; Rivas-Pérez et al., 1998). El método habitualmente utilizado para ajustar los parámetros de estos controladores es el de prueba y error (Deltour y Sanfilippo, 1998; Seatsu, 1999; Whalin y Clemmens, 2006), o mediante optimización (Clemmens y Schuurmans, 2004). Estos métodos, por lo general, se basan en modelos matemáticos de la planta nominal, y no consideran que los parámetros dinámicos de los canales principales de riego pueden cambiar en un amplio rango, como resultado de las variaciones de sus regímenes de descarga y/o de otros parámetros hidráulicos, por lo que los controladores PI se desajustan con facilidad o incluso pueden llegar a inestabilizar el sistema de control (Litrico et al., 2006; Rivas-Pérez et al., 2007). Es por ello que en este trabajo se exploran las posibles ventajas de un regulador de orden fraccional FPI versus un regulador convencional PI desde el punto de vista de su robustez frente a variaciones de los parámetros dinámicos del canal y de las perturbaciones.
Este trabajo tiene como objetivos: a) el desarrollo de un controlador robusto de orden fraccional FPI para el control efectivo de la distribución de agua en un tramo de un canal principal de riego (caracterizado por presentar grandes variaciones en sus parámetros dinámicos), que posibilite disminuir el tiempo de establecimiento y el pico máximo de la respuesta temporal del sistema de control, lo cual implica aumentar la operatividad de la distribución de agua y, por consiguiente, reducir las pérdidas por concepto de operación de los recursos hidráulicos disponibles; b) la implementación y validación práctica del controlador FPI diseñado en el primer tramo del canal principal Imperial de Aragón.
]]> En este trabajo se considera que es posible desarrollar sistemas efectivos de control descentralizado de la distribución de agua en canales principales de riego mediante el diseño de controladores robustos de orden fraccional independientes para cada tramo del canal y adicionar desacopladores, con el objeto de minimizar la interacción entre los tramos adyacentes (Litrico y Fromion, 2009; Schuurmans et al., 1999; Wahlin y Clemmens, 2006). Es por ello que este trabajo se centra en el diseño de un controlador FPI para un solo tramo de un canal principal de riego. El problema del control efectivo de la distribución de agua en tramos adyacentes o en canales completos (íntegros) mediante controladores de orden fraccional se analizará en trabajos futuros de investigación.La fundamental contribución de este trabajo consiste en la implementación y validación práctica (por primera vez) de un controlador robusto de orden fraccional (FPI) de la distribución de agua en un tramo de un canal principal de riego en explotación (primer tramo del canal principal Imperial de Aragón) con resultados muy satisfactorios. Esta contribución constituye una solución práctica y relativamente simple al complejo problema del diseño de controladores robustos de la distribución de agua en canales principales de riego con comportamiento dinámico impreciso (con grandes incertidumbres), y verifica que los controladores de orden fraccional (FOC) posibilitan obtener mejores resultados que los controladores convencionales (PI) en esta clase de aplicación.
Los resultados obtenidos formaron parte de un proyecto de investigación entre la Universidad de Castilla-La Mancha y la Confederación Hidrográfica del Ebro (España) en modelado y control de la distribución de agua en el canal principal Imperial de Aragón.
El trabajo se encuentra organizado de la siguiente forma: se obtiene un modelo matemático orientado al control del comportamiento dinámico del primer tramo del canal principal Imperial de Aragón; se desarrolla el diseño en el dominio de la frecuencia de un controlador robusto de orden fraccional (FPI) y de un controlador PI bajo las mismas especificaciones de respuesta temporal para el tramo de canal objeto de estudio bajo régimen de operación nominal; se analizan los resultados experimentales obtenidos de la implementación práctica de ambos controladores (FPI y PI) en el primer tramo del canal principal Imperial de Aragón, y finalmente se presentan las conclusiones del trabajo.
Modelo matemático orientado al control de un tramo de un canal principal de riego
La necesidad de disponer de modelos matemáticos que describan de forma adecuada el comportamiento dinámico más relevante de los canales principales de riego constituye uno de los inconvenientes que presenta el diseño e implementación práctica de sistemas efectivos de control de la distribución de agua en los canales principales de riego (Litrico y Fromion, 2009; Kovalenko, 1983; Rivas-Pérez et al., 2008a). Esta clase de modelos ofrece una valiosa información sobre las propiedades de los sistemas dinámicos, tales como respuesta temporal, retardo de tiempo, constantes de tiempo, frecuencia de cruce, pico máximo, etcétera.
El modelado matemático del comportamiento dinámico de los canales principales de riego se realiza usualmente mediante las ecuaciones de Saint-Venant, las cuales se basan en las leyes clásicas de conservación de masa y de conservación del momento (Chow, 1988; Kovalenko, 1983; Rivas-Pérez et al., 2003), y representan ecuaciones no lineales en derivadas parciales del tipo hiperbólicas con restricciones complejas, por lo que su utilización de forma directa en el diseño de sistemas de control presenta serias dificultades (Litrico y Fromion, 2009). Esto fundamenta la necesidad de obtener modelos matemáticos simples de los canales principales de riego que posibiliten su aplicación directa en el diseño de sistemas efectivos de control.
Los modelos lineales son usualmente suficientes para capturar las propiedades dinámicas fundamentales de los canales principales de riego, requeridas en el diseño de sistemas de control (Litrico y Fromion, 2009; Rivas-Pérez et al., 2007). Esta clase de modelos puede obtenerse mediante la aplicación de las herramientas de identificación de sistemas (Rivas-Pérez et al., 2011). La identificación de sistemas permite obtener modelos matemáticos simples que describen de forma adecuada la dinámica de plantas complejas para su utilización en el diseño de sistemas efectivos de control (Ljung, 1999).
Un canal principal típico de riego se encuentra conformado por diferentes tramos separados por compuertas, las cuales son utilizadas para regular la distribución de agua de un tramo a otro (ver figura 1, en la cual se muestra un diagrama del primer tramo de canal principal Imperial de Aragón). La magnitud de apertura de las compuertas se varía de forma adecuada para mantener un perfil determinado del agua a través de todo el tramo. En general, en un canal principal de riego controlado automáticamente (mediante el método de regulación aguas abajo con sensor de nivel alejado), la variable controlada es el nivel de agua yi(t) medida al final del tramo, la variable de control es la posición de la compuerta ui(t) aguas arriba y las perturbaciones fundamentales son las descargas laterales qi(t), donde i = 1, 2, ..., n es el número del tramo del canal (Kovalenko, 1983; Malaterre et al., 1998).
]]> Los datos y resultados reportados en este trabajo se obtuvieron del tramo 1 (origen) del canal principal Imperial de Aragón, conocido como Bocal. Este canal forma parte de la Confederación Hidrográfica del Ebro, la cual constituye la confederación hidrográfica más importante de la península Ibérica (Pedregal et al., 2009). Este canal toma sus aguas por derivación del río Ebro.El Bocal presenta una longitud de 8 kilómetros, una profundidad variable entre 3.1 y 3.6 metros, un ancho variable entre 15 y 26.9 metros, y conduce un caudal máximo (descarga) de Q(t) = 30 m3/s en toda su longitud. En la figura 2 se ofrece una vista superior de un segmento del Bocal, en la cual es posible observar los grandes volúmenes de agua que se transportan a través de este tramo de canal.
El nivel de agua en el Bocal se controla a través de 10 compuertas sumergibles mediante el método de regulación aguas abajo con sensor de nivel alejado. Estas compuertas se encuentran ubicadas en un recinto denominado como Casa de Compuertas. Las medidas disponibles en el Bocal son nivel de agua aguas arriba (río Ebro) yR(t), nivel de agua aguas abajo y11(t), nivel de agua aguas abajo alejado y12(t), y posición (abertura) de las compuertas aguas arriba u1(t) (ver figura 1). En la figura 1 se representan las 10 compuertas situadas en la Casa de Compuertas mediante una sola compuerta equivalente (Rivas-Pérez et al., 2008a).
Con el objeto de obtener el modelo matemático que describe el comportamiento dinámico de la distribución de agua en el Bocal (planta) se desarrollaron experimentos basados en la respuesta escalón. Para ello, se mantuvo en posición fija la compuerta aguas abajo; un total de cuatro compuertas aguas arriba recibieron un incremento simultáneo en su magnitud de apertura de 25 cm, lo que equivale a un incremento en la magnitud de apertura total de 100 cm, y se midió la variación de nivel de agua aguas abajo alejado. La respuesta temporal obtenida del comportamiento dinámico del Bocal se presenta en la figura 3.
Esta respuesta muestra que el comportamiento dinámico de la distribución de agua en el Bocal puede representarse mediante la siguiente función de transferencia de segundo orden con retardo de tiempo:

donde Δy12(s) es la variación de nivel de agua aguas abajo alejado; Δu1(s), la variación de la magnitud de apertura de la compuerta equivalente; K, la ganancia estática; T1, T2, las constantes de tiempo, y τ es el retardo de tiempo. Se considera que T1 es la constante de tiempo dominante (la de mayor magnitud, asociada con la dinámica del tramo del canal), mientras que T2 es la constante de tiempo de menor magnitud, la cual representa la dinámica secundaria (motor + compuerta + sensor de nivel). Usualmente, T2 es mucho menor que T1 (Rivas-Pérez et al., 2007).
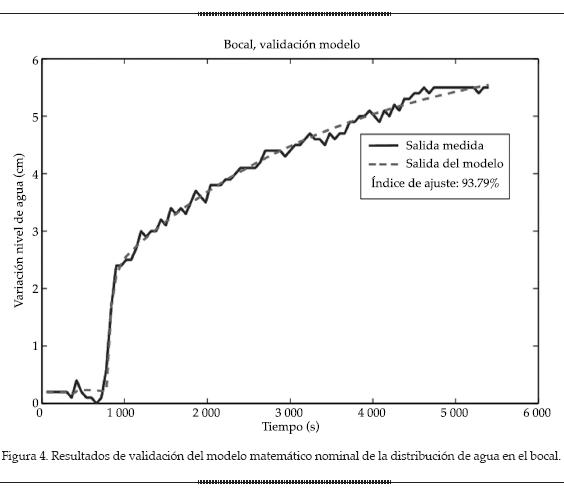
Cuando la descarga Q1(t) a través de las compuertas aguas arriba del Bocal se corresponde con el régimen nominal de operación Q1(t) = Qnom se obtienen los valores nominales de los parámetros del modelo matemático (1) (planta nominal). Estos parámetros se representan como K0, T10, T20, τ0, y sus valores son los siguientes K0 = 0.055, T10 = 880.79 s, T20 = 81.27 s, τ0 = 360 s. Los resultados de validación del modelo lineal nominal obtenido se muestran en la figura 4. De esta figura se observa que existe una buena correspondencia entre la salida medida y las predicciones que realiza dicho modelo.
]]>
Sin embargo, cuando la descarga Q1(t) a través de las compuertas aguas arriba del Bocal no se corresponde con el régimen nominal de operación Q1(t) ≠ Qnom y presenta variaciones en el rango de operación [Qmín, Qmáx] se originan cambios: en el volumen de agua que se acumula en el tramo del canal entre el volumen de descarga mínima y el de máxima descarga; en el nivel de agua aguas abajo en el rango [Hmín, Hmáx], así como en la propagación del flujo, la cual se determina en función de la celeridad de la ola (C) y de la velocidad media del flujo (V) (Chow, 1988; Kovalenko, 1983). Como resultado, los parámetros dinámicos del Bocal experimentan una amplia variación (incertidumbres paramétricas del modelo) en los siguientes rangos:
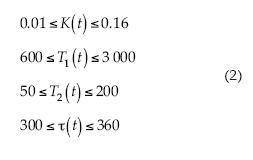
Por esta razón, cualquier controlador que se diseñe para el Bocal debe garantizar a priori un nivel específico de comportamiento mínimo en todo el rango de variación de sus parámetros dinámicos (incertidumbres del modelo). Este es el problema del diseño de controladores con comportamiento robusto.
Diseño del controlador robusto de orden fraccional (FPI)
En esta sección se desarrolla el diseño en el dominio de la frecuencia de un controlador robusto de orden fraccional FPI de la distribución de agua para el tramo del canal principal, objeto de estudio bajo comportamiento nominal. Como se mencionó previamente, este controlador puede ser considerado como una generalización de los controladores PI. Por otra parte, se analizan las propiedades de robustez del controlador FPI en comparación con las de un controlador convencional PI equivalente.
En el Bocal se encuentra implementado un controlador PI, el cual presenta como ventajas su facilidad de ajuste (sintonización) y obtención de un error en régimen permanente nulo frente a cambios tipo escalón en la referencia o perturbaciones también en forma de escalón. Como se señaló previamente, estos controladores presentan la dificultad de ser muy sensibles a las variaciones de los parámetros dinámicos del canal, desajustándose con facilidad o incluso pudiendo llegar a inestabilizar el sistema de control (Litrico y Fromiom, 2009; Rivas-Pérez, 1990).
El enfoque desarrollado en este trabajo consiste en diseñar un controlador que exhiba el mismo comportamiento que un PI frente al comportamiento dinámico nominal del Bocal; es decir, diseñado para las mismas especificaciones, pero que presente menos sensibilidad frente a cambios en los parámetros dinámicos de la planta y, por consiguiente, mayor robustez. Nuestra propuesta novedosa consiste en la utilización de un controlador de orden fraccional FPI, donde el grado adicional de libertad que posibilita aumentar la robustez y conseguir comportamientos frecuenciales prefijados viene dado por el orden fraccional a del controlador. Por ello, nuestro objetivo consiste en obtener un controlador que, comportándose de forma similar a un PI bajo régimen nominal, proporcione una mejor respuesta temporal del sistema de control cuando se produzcan variaciones en el régimen de descarga a través de las compuertas aguas arriba del Bocal en el rango de operación [Qmín, Qmáx] y/o variaciones de otros parámetros hidráulicos.
]]> El controlador FPI que se propone se representa mediante la siguiente función de transferencia: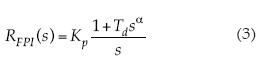
donde:
Observar que el controlador FPI (3) se convierte en un controlador PI convencional cuando el parámetro de orden fraccional α = 1. Esta clase de controladores requiere el ajuste de tres parámetros KP, Td y α, es decir, un parámetro más que en el caso del controlador PI convencional. El parámetro de orden fraccional α se utiliza para cumplir con especificaciones adicionales de comportamiento robusto del sistema de control.
En la figura 5 se muestra el diagrama de bloques del sistema de control de orden fraccional de la distribución de agua en el Bocal que se propone. En este diagrama se ha considerado una perturbación D(s), la cual representa la descarga lateral del tramo qi(t) (ver figura 1) y se modela mediante una señal escalón que pasa a través de un filtro de primer orden con constante de tiempo T3 = 70 s.
El método que se propone de diseño del controlador robusto FPI se basa en las siguientes especificaciones en el dominio de la frecuencia: a) margen de fase deseado (Φm), el cual garantiza el amortiguamiento nominal deseado de la respuesta temporal (sobreimpulso (Mp)), así como la robustez del sistema de control frente a variaciones del retardo de tiempo; b) frecuencia de cruce de ganancia deseada (ωc), la cual garantiza la velocidad nominal deseada de la respuesta temporal del sistema de control (tiempo de establecimiento (ts)), c) zero error de estado estacionario. La última especificación implica que el controlador debe incluir un término integral. Los parámetros del controlador (3) que cumplen con las especificaciones a)-c) se calculan mediante el siguiente procedimiento algebraico desarrollado en el dominio de la frecuencia.
En correspondencia con el teorema del valor final (Ogata, 1993), la especificación c) implica que α > 0. Las especificaciones de diseño a) y b) dadas por un determinado margen de fase (Φm) y una frecuencia de cruce de ganancia (ωc) pueden expresarse de forma compacta utilizando la siguiente notación compleja:

donde G(jωc) representa al comportamiento dinámico (1) del Bocal.
]]> De (5), considerando las expresiones (3) y (4), se obtiene:
Teniendo en cuenta que:

de la expresión (6) se obtienen los parámetros del controlador Kp y Td:
donde:
 y
y  representan las partes real e imaginaria de un número complejo, respectivamente.
representan las partes real e imaginaria de un número complejo, respectivamente.
Las especificaciones de diseño del controlador FPI son las siguientes:
]]>• Margen de ganancia: el parámetro que presenta la mayor influencia en la estabilidad del sistema de control en lazo cerrado es la ganancia estática K de la planta. Los resultados presentados en la sección anterior (2) muestran que este parámetro puede tener variaciones de hasta tres veces el valor nominal (Kmáx ≈ 3 K0).
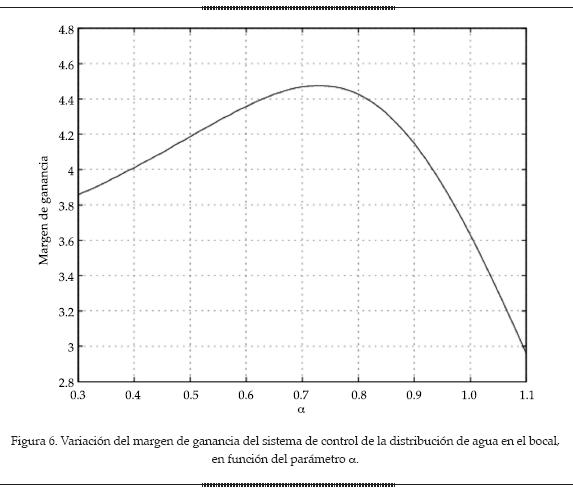
• Por consiguiente, el parámetro de orden fraccional a del controlador FPI se utiliza para mejorar la robustez del sistema de control en lazo cerrado, en el sentido de la estabilidad, frente a variaciones de la ganancia K del Bocal; es decir, para garantizar que el margen de ganancia (Mg) del sistema de control alcance su valor máximo. En la figura 6 se muestra la variación del margen de ganancia en función del parámetro α. De esta figura se observa que el valor máximo del margen de ganancia Mg ≈ 4.47 se alcanza con α ≈ 0.77. Observar en esta figura que el margen de ganancia que se obtiene con α = 1 (controlador PI estándar) es Mg = 3.6, por lo que se logra una mejora de un 24%.
• Frecuencia de cruce y tiempo de establecimiento: el tiempo de establecimiento de la planta nominal en lazo abierto es aproximadamente t0OL ≈ 3T10 + τ0 = 3 000 s. Se desea que el sistema de control en lazo cerrado sea dos veces más rápido, para ello se escoge la frecuencia de cruce ωc = 0.0033 rad/s, la cual de forma aproximada se corresponde con el tiempo de establecimiento ts ≈ 5/ωc ≈ 1 500 s. Esta última expresión es una aproximación obtenida de la consideración general sobre la relación inversa que existe entre la frecuencia de cruce de ganancia y el tiempo de establecimiento (Ogata, 1993).
• Margen de fase: se escoge un margen de fase Φm = 60°, el cual es un valor estándar para esta especificación. Para plantas de segundo orden, el coeficiente de amortiguamiento ξ se encuentra relacionado con el margen de fase mediante la expresión ξ = Φm = 60/100 si 0 ≤ ξ ≤ 0.6. Utilizando la expresión  , la cual relaciona el máximo sobreimpulso Mp y el coeficiente de amortiguamiento para plantas de segundo orden, se obtiene que el margen de fase seleccionado se corresponde con un Mp ≈ 10%, el cual es aceptable para esta clase de aplicación. Estas expresiones son utilizadas con frecuencia como aproximaciones razonables de plantas de alto orden (Ogata, 1993).
, la cual relaciona el máximo sobreimpulso Mp y el coeficiente de amortiguamiento para plantas de segundo orden, se obtiene que el margen de fase seleccionado se corresponde con un Mp ≈ 10%, el cual es aceptable para esta clase de aplicación. Estas expresiones son utilizadas con frecuencia como aproximaciones razonables de plantas de alto orden (Ogata, 1993).
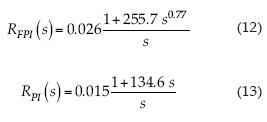
Utilizando el par de especificaciones frecuenciales de diseño (Φm, ωc) y el parámetro de orden fraccional α, de las expresiones (8) y (9) se obtienen los valores de los parámetros de los controladores FPI y PI, representados, respectivamente, mediante las siguientes expresiones:
]]> Resultados de simulación
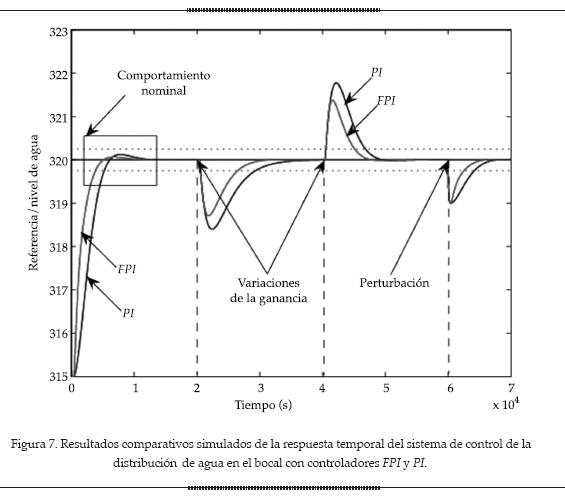
Con el objeto de confirmar que el sistema de control de la distribución de agua en el Bocal presenta un mejor comportamiento, así como una mayor robustez con el controlador FPI que el controlador PI frente a variaciones de los parámetros dinámicos del Bocal o de perturbaciones externas, se realizaron diferentes simulaciones de dicho sistema con ambos controladores bajo las mismas condiciones de operación del canal. En la figura 7 y en el cuadro 1 se muestran los resultados comparativos obtenidos de simulación, de donde se observa que cuando el Bocal presenta comportamiento nominal (régimen nominal de operación) ambos controladores se comportan de forma aproximadamente similar. Sin embargo, cuando se originan variaciones en el régimen de descarga del Bocal en el rango de operación [Qmín, Qmáx] y como resultado la ganancia presenta un valor diferente al nominal (K ∈ [0.01, 0.16]), la referencia de nivel de agua (320 cm) se alcanza mucho más rápido (menor tiempo de establecimiento) y con un menor pico máximo con el controlador FPI que con el controlador PI. Además, la atenuación al efecto nocivo de las perturbaciones es también mucho más rápida con el controlador FPI que con el PI. Por consiguiente, el controlador FPI posibilita aumentar la operatividad de la distribución de agua en el Bocal y por ende disminuir las pérdidas por concepto de operación de los recursos hidráulicos disponibles.

De esta forma se demuestra que con el controlador FPI se obtienen ventajas significativas sobre el controlador PI cuando se requiere controlar la distribución de agua en un tramo de un canal principal de riego con parámetros dinámicos variables en el tiempo, comportándose de forma más robusta en todo el rango de variación de dichos parámetros.
Resultados de implementación práctica del controlador FPI en el Bocal
La viabilidad y robustez del controlador FPI diseñado se demostró mediante su implementación práctica en tiempo real en un PLC Siemens SIMATIC S7-300, instalado en la sala de control del Bocal, el cual forma parte del sistema de supervisión y control centralizado de la Confederación Hidrográfica del Ebro (CHE). Este PLC se caracteriza por ser compacto (modular) y muy potente, disponer de una alta velocidad de respuesta en tiempo real, presentar una alta conectividad y ofrecer diferentes facilidades en el manejo del software y del hardware. Además, presenta alta inmunidad a las interferencias producidas por motores y puede trabajar en condiciones ambientales adversas, tales como altas temperaturas y elevada humedad.
]]> El controlador PI (13) utilizado en el control del grupo de compuertas aguas arriba del Bocal (denominado regulador piloto) se encuentra implementado en el PLC Siemens SIMATIC S7-300 referenciado. Este controlador entrega su señal de control uPI(t) a otro controlador interno (denominado regulador de órgano), encargado de discretizar la señal de control uPI(kT) y obtener el posicionamiento (apertura real) del grupo de compuertas aguas arriba (situadas en la Casa de Compuertas). De esta forma se logra que las compuertas no estén continuamente en movimiento y se reduce el desgaste mecánico que un movimiento continuado trae aparejado. En la figura 8 se muestra el diagrama de bloques funcional del sistema de control de la distribución de agua en el Bocal, en el cual es posible observar la interacción existente entre el regulador piloto y el regulador de órgano.El controlador FPI diseñado (12) se implementó de forma paralela con el controlador PI (13) en el PLC SIMATIC S7-300 mediante un programa en AWL (lista de instrucciones). El operador de orden fraccional del controlador FPI (12) se implementó a través de un filtro discreto tipo FIR (Respuesta Impulso Finita) obtenido mediante su aproximación numérica utilizando la definición de Grundwald-Letnikov (Podlubny, 1999a; Vinagre et al., 2000) y combinado con el principio de aproximación de memoria corta con serie de 500 términos (N = 500). El periodo de muestreo utilizado fue T = 60 s, por lo que el PLC dispone de suficiente tiempo para generar las señales de control.
Los criterios que se siguieron para la implementación del controlador FPI (12) en el PLC SIMATIC S7-300 fueron los siguientes: a) estructura modular de las rutinas del código ejecutable, de forma tal que su funcionamiento disponga de la mayor autonomía posible; b) elevada fiabilidad, introduciendo en el PLC el código ejecutable estrictamente necesario para la implementación del controlador FPI de forma paralela con el controlador PI; c) simple y rápida conmutación entre los controladores FPI y PI en caso de detectarse algún tipo de fallo o de mal funcionamiento; y d) disponibilidad de las señales de control de ambos controladores, así como de la variable controlada (nivel de agua aguas abajo alejado) para la supervisión y comparación del funcionamiento de ambos controladores. El código ejecutable del controlador FPI (12) presenta las siguientes rutinas:
a) Rutina de inicialización de datos internos. Se ejecuta sólo durante el arranque del sistema de control. Se ocupa de generar los vectores de pesos de la aproximación discreta de Grundwald-Letnikov, en función de los parámetros del controlador FPI (12) y del periodo de muestreo.
b) Rutina de selección del instante de muestreo. Se ejecuta de manera cíclica. Su función consiste en escoger uno de los dos controladores (FPI o PI) y en qué instante de tiempo se debe conectar.
c) Rutina de cálculo de la señal de control. Se ejecuta a petición de la rutina anterior. Es la encargada de calcular la señal de control.
Resultados experimentales
Se muestran dos casos de resultados experimentales comparativos de funcionamiento en tiempo real del sistema de control de la distribución de agua con controladores FPI y PI en el Bocal. En el primer caso se consideró una disminución del valor de la señal de referencia de nivel de agua aguas abajo alejado (disminución de la descarga a través de las compuertas aguas arriba) y, en el segundo, un aumento de dicho valor (incremento de la descarga a través de las compuertas aguas arriba). En cada caso, se desarrolló primero un experimento con el controlador PI y luego se repitió el mismo experimento con el controlador FPI. Es necesario tener en cuenta que debido a que los experimentos con controladores FPI y PI se desarrollaron de forma separada en condiciones de operación en tiempo real es muy difícil mantener las mismas condiciones aguas arriba (variación de nivel en el río Ebro) durante ambos experimentos. De hecho, estas variaciones constituyen una de las principales perturbaciones del sistema de control en este tramo. Además, las variaciones de nivel en el río Ebro presentan carácter aleatorio (Pedregal et al., 2009) y no pueden ser controladas mediante nuestro sistema de control.
]]> En el primer caso se varió la señal de referencia de nivel de agua aguas abajo alejado del sistema de control de la distribución de agua en el Bocal desde 325 hasta 317 cm, lo cual representa una disminución de 8 cm, manteniéndose la compuerta aguas abajo en la misma posición. En este caso, la descarga a través de las compuertas aguas arriba disminuyó (Q1(t) < Qnom) y, por consiguiente, el nivel de agua en el tramo también disminuyó. El gráfico superior de la figura 9 muestra los resultados comparativos de la variación de nivel en el río Ebro (condiciones de perturbación), mientras que el gráfico inferior y el cuadro 2 exhiben los resultados comparativos de la variación de nivel de agua aguas abajo alejado (variable controlada) en el Bocal durante los experimentos en tiempo real con controladores FPI y PI. Del gráfico superior de esta figura se observa que el nivel de agua en el río Ebro se mantuvo con una pequeña variación (ΔyR(t) = ±5 cm) durante cada uno de los experimentos con controladores FPI y PI, por lo que ambos experimentos se desarrollaron en condiciones similares de perturbación. Del gráfico inferior de esta figura y del cuadro 2 es posible observar que el nivel de agua en el Bocal durante ambos experimentos presentó una región de error de 2 cm en relación con el nivel de referencia. Sin embargo, el nivel de referencia se alcanza más rápido con el controlador FPI (52.5 min) que con el controlador PI (61.5 min), es decir, aproximadamente 9 min más rápido; a los 120 min, el nivel de agua con el controlador FPI presenta cero error de estado estacionario; mientras que con el controlador PI, esta variable todavía presenta un error de estado estacionario de 1 cm.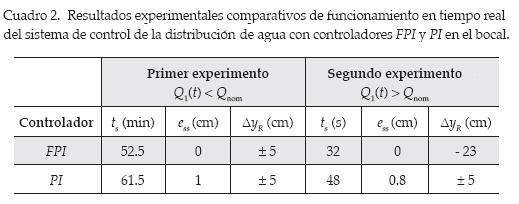
En el segundo caso se varió la señal de referencia de nivel de agua aguas abajo alejado del sistema de control de la distribución de agua en el Bocal desde 310 cm hasta 320 cm, lo cual representa un aumento de 10 cm, manteniéndose la compuerta aguas abajo en la misma posición. En este caso, la descarga a través de las compuertas aguas arriba aumentó (Q1(t) > Qnom) y por consiguiente el nivel de agua en el Bocal también se incrementó. Los resultados experimentales comparativos de control de la distribución de agua en el Bocal con controladores PI y FPI se muestran en la figura 10 y en el cuadro 2. Del gráfico superior de esta figura (condiciones de perturbación) se observa un brusco descenso de nivel en el río Ebro durante el experimento con controlador FPI. Este descenso se produjo debido a la entrada en funcionamiento de una central hidroeléctrica situada a la misma altura de la Casa de Compuertas del Bocal, pero en la margen contraria del río Ebro. Esta fuerte perturbación originó un descenso de nivel en el río Ebro desde los 385 hasta los 362 cm, es decir ΔyR(t) = –23 cm (aproximadamente) en un tiempo inferior a los 2.5 min; mientras que durante el experimento con el controlador PI, el nivel en el río Ebro se mantuvo con una pequeña variación (ΔyR(t) = ±5 cm). Por consiguiente, el experimento con controlador FPI se desarrolló en condiciones de una mayor variación de la descarga a través de las compuertas aguas arriba del Bocal, así como de una mayor variación de los parámetros dinámicos de dicho tramo.
En el gráfico inferior de la figura 10 y en el cuadro 2 se observa que el nivel de agua aguas abajo alejado en el Bocal presentó una región de error de ±1.0 cm en relación con el nivel de referencia durante los experimentos con ambos controladores, pero nuevamente el nivel de referencia se alcanzó más rápido (32 min) con el controlador FPI que con el controlador PI (48 min), es decir 16 min aproximadamente más rápido. Además, a los 80.0 min, el nivel de agua en el Bocal con el controlador FPI presenta cero error de estado estacionario; mientras que con el controlador PI, esta variable todavía mantiene un error de estado estacionario de 0.8 cm.
Estos resultados experimentales muestran que el controlador FPI exhibe un comportamiento dinámico superior al controlador PI en el sentido de propiciar un menor tiempo de establecimiento de la respuesta temporal del sistema de control (mayor velocidad de respuesta) en aproximadamente un 25% y con una mayor exactitud en el control. Ello posibilita aumentar la operatividad de la distribución de agua en el canal, satisfacer en tiempo las demandas de los diferentes usuarios y reducir las pérdidas de agua por concepto de explotación en un 25% (Kovalenko, 1983; Litrico y Fromion, 2009).
Por otro lado, se observa una mayor robustez del controlador FPI en relación con el PI debido a que la respuesta temporal del sistema de control con controlador FPI presenta un mejor comportamiento que la obtenida con el controlador PI bajo condiciones de mayores variaciones de los parámetros dinámicos del Bocal, así como de perturbaciones externas más agresivas.
De esta forma se demuestra con resultados experimentales comparativos de funcionamiento en tiempo real del sistema de control de la distribución de agua en el Bocal con controladores FPI y PI la conveniencia de la implementación de controladores de orden fraccional cuando se requiere el control efectivo de canales principales de riego con parámetros dinámicos variables en el tiempo.
Conclusiones
]]> Se presentó el diseño e implementación práctica en tiempo real de un controlador FPI en un tramo de un canal principal de riego en explotación, el cual se comporta de forma más robusta que otro controlador PI equivalente (en el sentido de que ambos exhiben el mismo comportamiento dinámico en lazo cerrado para las especificaciones de la planta nominal) frente a grandes variaciones de los parámetros dinámicos, así como ruidos de alta frecuencia de la planta. Este resultado presenta una especial relevancia en canales principales de riego, cuyos parámetros dinámicos exhiben una amplia variación cuando se originan cambios en los regímenes de descarga en el rango de operación [Qmín, Qmáx].Se desarrolló la implementación práctica del controlador FPI diseñado en un PLC SIMATIC S7-300, con base en criterios de simplicidad, elevada autonomía y fiabilidad del código ejecutable del controlador.
Se desarrollaron experimentos evaluativos del funcionamiento en tiempo real del sistema de control, con controladores FPI y PI de la distribución de agua en un tramo de un canal principal de riego en explotación, caracterizado por presentar amplias variaciones en sus regímenes de descarga. Estos experimentos mostraron que cuando se originan variaciones en el régimen de descarga del canal (Q1(t) ≠ Qnom), con el controlador FPI se obtiene un menor tiempo de establecimiento de la respuesta temporal (mayor velocidad de respuesta) del sistema de control en aproximadamente un 25% y con una mayor exactitud en el control, lo cual implica una mayor operatividad de la distribución de agua en el canal, satisfacer de forma más rápida las demandas de los diferentes usuarios y reducir de forma significativa las pérdidas de los recursos hidráulicos disponibles por concepto de operación en aproximadamente 25%.
Resulta importante destacar que en este trabajo se presentan las primeras experiencias relacionadas con la implementación práctica y evaluación comparativa de un controlador robusto de orden fraccional FPI en un tramo de un canal principal de riego en explotación. El siguiente objetivo de nuestras investigaciones consiste en generalizar los resultados obtenidos en este trabajo en el control integral de un canal principal de riego conformado por varios tramos con fuerte interacción entre los tramos.
Los beneficios que se obtienen con el aumento de la robustez y efectividad en el control de la distribución de agua en un canal principal de riego se revierten de forma inmediata en una mejor administración y uso de los recursos hidráulicos disponibles, así como en una mayor protección del medio ambiente, al disminuir las pérdidas de agua por concepto de operación.
Agradecimientos
Este trabajo forma parte de un proyecto de colaboración científica entre la Universidad de Castilla La-Mancha y la Confederación Hidrográfica del Ebro en modelado y control del canal principal Imperial de Aragón. Los autores expresan sus sinceros agradecimientos a las autoridades de la Confederación Hidrográfica del Ebro por el incondicional apoyo y soporte recibido.
Referencias
]]>BARBOSA, R.S., MACHADO, J.A.T., and FERREIRA, I.M. Controller tuning based on Bode's ideal transfer function. Nonlinear dynamics. Vol. 38, No. 1-4, 2004, pp. 305-321. [ Links ]
BAUME, J., MALATERRE, P., and SAU, J. Tuning of PI controllers for an irrigation canal using optimization tools. Proceedings of Workshop on Modernization of Irrigation Water Delivery Systems, Phoenix, Arizona, USA, 1999. [ Links ]
BURT, C., MILLS, R., KHALSA, R., and RUIZ, V. Improved proportional integral (PI) logic for canal automation. Journal of Irrigation and Drainage Engineering. Vol. 124, No. 1, 1998, pp. 53-57. [ Links ]
BUYALSKI, C., EHLER, D., FALVEY, H., ROGERS, D., and SERFOZO, E. Canal systems automation manual. Technical report. A water resources technical publication. Vol. 1, Denver: Department of Interior, Bureau of Reclamation, 1991, 113 pp. [ Links ]
CASTILLO-GARCÍA, F., FELIU-BATLLE, V., and RIVAS-PÉREZ, R. Time domain tuning of fractional order controllers combined with a Smith predictor for automation of water distribution in irrigation main channel pools. Asian Journal of Control. Vol. 15, No. 3, 2013, pp. 1-15. [ Links ]
]]>CASTILLO, F., FELIU, V., RIVAS-PÉREZ, R., and SÁNCHEZ, L. Design of a class of fractional controllers from frequency specifications with guaranteed time domain behaviour. Computers and Mathematics with Applications. Vol. 59, No. 5, 2010, pp. 1656-1666. [ Links ]
CHEN, Y., DOU, H., VINAGRE, B., and MONJE, C. A robust tuning method for fractional order PI controllers. Proceedings of 2nd IFAC workshop on fractional differentiation and its applications, Porto, Portugal, 2006. [ Links ]
CHEN, Y., VINAGRE, B., and PODLUBNY, I. Using continued fraction expansion to discretize fractional order derivatives. Nonlinear dynamics. Vol.38, No. 1-4, 2004, pp. 155-170. [ Links ]
CHOW, V.T. Open-channels hydraulics. New York: McGraw Hill Book Company, 1988, 680 pp. [ Links ]
CLEMMENS, A. Canal automation. Resource Magazine. Vol. 13, No. 1, 2006, pp. 7-8. [ Links ]
]]>CLEMMENS, A., and SCHUURMANS, J. Simple optimal downstream feedback canal controllers: theory. Journal of Irrigation and Drainage Engineering. Vol. 130, No. 1, 2004, pp. 26-34. [ Links ]
CORRIGA, G., SANNA, S., and USAI, G. Estimation of uncertainty in an open-channel network mathematical model. Applied Mathematical Modelling. Vol. 13, 1989, pp. 651-657. [ Links ]
DELTOUR, J. y SANFILIPPO, F. Introduction of Smith predictor into dynamic regulation. Journal of Irrigation and Drainage Engineering. Vol. 124, No. 1, 1998, pp. 3-30. [ Links ]
DJOUAMBI, A., CHAREF, A., and BOUKTIR, T. Fractional order robust control and PIλ Dµ controllers. WSEAS transactions on circuits and systems. Vol. 4, No. 8, 2005, pp. 850-857. [ Links ]
FELIU-BATLLE, V., RIVAS-PÉREZ, R., CASTILLO, F., SÁNCHEZ, L., and LINAREZ, A. Robust fractional order controller for irrigation main canal pools with time-varying dynamical parameters. Computers and Electronics in Agriculture. Vol. 76, No. 2, 2011, pp. 205-217. [ Links ]
]]>FELIU-BATLLE, V., RIVAS-PÉREZ, R., CASTILLO, F., and SÁNCHEZ, L. Smith predictor based robust fractional order control: Application to water distribution in a main irrigation canal pool. Journal of Process Control. Vol. 19, No. 3, 2009a, pp. 506-519. [ Links ]
FELIU-BATLLE, V., RIVAS-PÉREZ, R., and CASTILLO, F. Fractional order controller robust to time delay variations for water distribution in an irrigation main canal pool. Computers and electronics in agriculture. Vol. 69, No. 2, 2009b, pp. 185-197. [ Links ]
FELIU-BATLLE, V., RIVAS-PÉREZ, R., and SÁNCHEZ, L. Fractional robust control of main irrigation canals with variable dynamic parameters. Control Engineering Practice. Vol. 15, No. 6, 2007, pp. 673-686. [ Links ]
KOVALENKO, P.I. Automation of land reclamation systems. Moscow: Kolos, 1983, 330 pp. [ Links ]
LEU, J., TSAY, S., and HWANG, C. Design of optimal fractional-order PID controllers. Journal of the Chinese Institute of Chemical Engineers. Vol. 33, No. 2, 2002, pp. 193-202. [ Links ]
]]>LITRICO, X. and FROMION, V. Modeling and control of hydrosystems. London: Springer-Verlag, 2009, 409 pp. [ Links ]
LITRICO, X., FROMION, V., and BAUME, J. Tuning of robust distant downstream PI controllers for an irrigation canal pool: (II) implementation issues. Journal of Irrigation and Drainage Engineering. Vol. 132, No. 4, 2006, pp. 369-379. [ Links ]
LJUNG, L. System identification - theory for the user. Second edition. New Jersey: Prentice Hall PTR, 1999, 610 pp. [ Links ]
MACHADO, J. Analysis and design of fractional-order digital control systems. Journal Systems Analysis-Modeling-Simulation. Vol. 27, 1997, pp. 107-122. [ Links ]
MALATERRE, P., ROGERS, D., and SCHUURMANS, J. Classification of canal control algorithms. Journal of Irrigation and Drainage Engineering. Vol. 124, No. 1, 1998, pp. 3-10. [ Links ]
]]>MONJE, C., VINAGRE, B., CHEN, Y., and FELIU, V. On fractional PIλ controllers: some tuning rules for robustness to plant uncertainties. Nonlinear Dynamics. Vol. 38, No. 1-4, 2004, pp. 369-381. [ Links ]
MONTAZAR, A., OVERLOOP, P., and BROUWER, R. Centralized controller for the Narmada main canal. Journal of Irrigation and Drainage Engineering. Vol. 54, 2005, pp. 79-89. [ Links ]
OGATA, K. Modern control engineering. New Jersey: Prentice-Hall, Englewood Cliffs, 1993, 1013 pp. [ Links ]
PEDREGAL, D., RIVAS-PÉREZ, R., FELIU, V., SÁNCHEZ, L., and LINARES, A. A non-linear forecasting system for the Ebro River at Zaragoza, Spain. Environmental modelling and software. Vol. 24, No. 4, 2009, pp. 502-509. [ Links ]
PETRAS, I., GREGA, S., and DORCAK, L. Digital fractional order controllers realized by PIC microprocessor: experimental results. Proceedings of international Carpathian control conference, High Tatras, Slovak Republic, 2003. [ Links ]
]]>PETRAS, I. Control of fractional order Chua's system. Journal of Electrical Engineering. Vol. 53, No. 7-8, 2002, pp. 219-222. [ Links ]
PODLUBNY, I., PETRAS, I., VINAGRE, B., O'LEARY, P. y DORCAK, L. Analogue realization of fractional order controllers. Nonlinear Dynamic. Vol. 29, 2002, pp. 281-296. [ Links ]
PODLUBNY, I. Fractional differential equations. San Diego: Academic Press, 1999a, 368 pp. [ Links ]
PODLUBNY, I. Fractional-Order Systems and PIλDµ Controllers. IEEE Transactions on Automatic Control. Vol. 44, No. 1, 1999b, pp. 208-214. [ Links ]
RIVAS-PÉREZ, R., SOTOMAYOR, J., FELIU, V. y CASTILLO, F. Control robusto de orden fraccional de la presión del vapor en el domo superior de una caldera bagacera. Memorias del XV Congreso Latinoamericano de Control Automático, Lima, Perú, 2012. [ Links ]
]]>RIVAS-PÉREZ, R., FELIU-BATLLE, V., CASTILLO, F., and LINAREZ, A. Control oriented model of a complex irrigation main canal pool. IFAC Proceedings Volumes (IFAC-PapersOnline). Vol. 18, No. PART 1, 2011, pp. 2919-2924. [ Links ]
RIVAS-PÉREZ, R., FELIU-BATLLE, V., SÁNCHEZ, L., PEDREGAL, D., and LINARES, A. Identification of the first pool of the Imperial de Aragón main irrigation canal. Hydraulic Engineering in Mexico. Vol. XXIII, No. 1, 2008a, pp. 71-87. [ Links ]
RIVAS-PÉREZ, R., FELIU-BATLLE, V., CASTILLO-GARCÍA, F., y LINAREZ, A. System identification for control of a main irrigation canal pool. IFAC Proceedings Volumes (IFAC-PapersOnline), Vol. 17, No. 1, Part 1, 2008b. [ Links ]
RIVAS-PÉREZ, R., FELIU-BATLLE, V., SÁNCHEZ, L., CASTILLO, F. y LINAREZ, A. Computer based fractional order control system of water levels in irrigation main Canals. Patent No. ES 2277757, International classification G05 D 9/12, E02 B 7/36, Spain, 2008c. [ Links ]
RIVAS-PÉREZ, R., FELIU-BATLLE, V., and SÁNCHEZ, L. Robust system identification of an irrigation main canal. Advances in Water Resources. Vol. 30, No. 8, 2007, pp. 1785-1796. [ Links ]
]]>RIVAS-PÉREZ, R., PERAN, J., PINEDA, B., and PÉREZ, S. Distributed control under centralized intelligent supervision in the Güira de Melena irrigation System. Hydraulic Engineering in Mexico. Vol. XVIII, No. 2, 2003, pp. 53-68. [ Links ]
RIVAS-PÉREZ, R., PRADA, C., PERAN, J., and KOVALENKO, P. Robust adaptive predictive control of water distribution in irrigation canals. Proceedings of 15th IFAC World Congress, Barcelona, Spain, 2002. [ Links ]
RIVAS-PÉREZ, R., BEAUCHAMP, G., RODRIGUEZ, D., and PÉREZ, S. Computer control of water distribution in irrigation systems. Tropical Hydrology and Caribbean Water Resources Proceedings, Book Series: American Water Resources Association Technical Publication Series. Vol. 98, No. 2, 1998, pp. 149-154. [ Links ]
RIVAS-PÉREZ, R. Automatic control of water distribution in irrigation systems. D.Sc. thesis, Kiev, Ukraine: Land Reclamation and Hydraulic Scientific Research Institute of Ukraine (UkrNIIGiM), 1990, 520 pp. [ Links ]
SÁNCHEZ, L., FELIU-BATLLE, V., RIVAS-PÉREZ, R., and RUIZ, M. Robust Control of a Laboratory Hydraulic Canal by Using a Fractional PI Controller. Proceedings of the 2007 ASME international design engineering technical conferences. Las Vegas, Nevada, USA, 2007. [ Links ]
]]>SCHUURMANS, J., HOF, A., DIJKSTRA, S., BOSGRA, O., and BROUWER, R. Simple water level controller for irrigation and drainage canals. Journal of Irrigation and Drainage. Vol. 125, No. 4, 1999, pp. 189-195. [ Links ]
SEATZU, C. Design and robustness analysis of decentralized constant volume-control for open-channels. Applied Mathematical Modelling. Vol. 23, No. 6, 1999, pp. 479-500. [ Links ]
VINAGRE, B., PODLUBNY, I., HERNÁNDEZ, A., and FELIU, V. Some approximations of fractional order operators used in control theory and applications. Journal of Fractional Calculus and Applied Analysis. Vol. 3, No. 3, 2000, pp. 231-248. [ Links ]
WAHLIN, B. Performance of model predictive control on ASCE test canal 1. Journal of Irrigation and Drainage Engineering. Vol. 130, No. 3, 2004, pp. 227-237. [ Links ]
WAHLIN, B. and CLEMMENS, A. Automatic downstream water-level feedback control of branching canal networks: theory. Journal of Irrigation and Drainage Engineering. Vol. 132, No. 3, 2006, pp. 208-219. [ Links ]
]]>WANG, Z., WANG, Z., CAO, G. y ZHU, X. Digital implementation of fractional order PID controller and its application. Journal of Systems Engineering and Electronics. Vol. 16, No. 1, 2005, pp. 116-122. [ Links ]
]]>