











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. Introducción
Hoy en día un gran índice de la población es afectada por diferentes patologías en el pie, causadas en su mayoría por el uso inadecuado del calzado, el sobrepeso, la permanencia de tiempos prolongados de pie, las variaciones anatómicas o bien por caminar en superficies duras. Una de estas patologías es la fascitis plantar que es la inflamación del tejido conectivo grueso que se encuentra en la planta del pie y que se fija en el talón (Cerdeño & Casas, 2014). Afecta aproximadamente al 10% de los corredores durante su carrera deportiva y una proporción similar a la población en general a lo largo de su vida. Usualmente se presenta en personas de mediana edad y afecta por igual a hombres y mujeres.
El tratamiento de esta patología ha sido ampliamente discutido en la literatura médica mundial. Lafuente y colaboradores en (Lafuente, O'Mullony, Escriba, & Cura, 2007) realizaron una revisión del tratamiento basado en la evidencia al consultar en los principales buscadores y bases de datos biomédicas: MEDLINE, Evidence Based Medicine, Cochrane Database of Systematic Reviews, Cochrane Register of Controlled Trials, EMBASE y PEDRO (Physiotherapy Evidence Database). Para después seleccionar a los estudios de mayor calidad científica: metaanálisis, revisiones sistemáticas, revisiones y ensayos clínicos controlados y/o aleatorizados de una o varias intervenciones para tratar el dolor plantar del talón y encontraron que se han empleado con este objetivo, desde los fármacos y fisioterapia hasta el uso de infiltraciones, soportes e inmovilizaciones con vendajes enyesados y dispositivos. Pero su eficacia es variable y no hay evidencia fuerte del beneficio de ninguna modalidad de tratamiento. Únicamente se encontró limitada evidencia de beneficio con la utilización de taloneras blandas, junto con la realización de masajes, principalmente ejercicios específicos de estiramiento de la fascia plantar.
Como una propuesta de innovación se pretende generar un prototipo de sistema de relajación podal que contribuya en el tratamiento de la fascitis plantar mediante el uso de sistemas embebidos de bajo costo con comunicación inalámbrica que realicen rutinas de masajes mediante vibraciones con variaciones de temperatura como una alternativa tecnológica al tratamiento quirúrgico.
Este sistema de relajación podal es la fusión de la electrónica y la ingeniería textil con una aplicación médica conocida como Smart textile o textil inteligente. En México existen pocos desarrollos de textiles inteligentes con aplicaciones médicas. En el estado de arte se menciona el reporte técnico de (González, 2017), que sirvió como base para el desarrollo de este prototipo.
El desarrollo de investigaciones de este campo contribuye a innovar productos textiles tradicionales. Así mismo, es importante implementar el cuidado que se le da al cuerpo a través de accesorios que permitan mantenerse en un estatus más saludable sin tener que acudir a algún tratamiento quirúrgico, de esta manera se cuida la economía familiar y la salud de los pies. Las personas que se beneficiarán con este producto se encuentran entre los 30 y 60 años de edad, quienes presentarán un cuadro de relajación y descanso en sus pies.
Para lograr esto, es necesario investigar los esquemas de comunicación entre sistemas para lograr la operación remota del sistema de relajación. También se pretende investigar los tipos de enfermedades en huesos y músculos del pie, así como las posibles alternativas no quirúrgicas para tratar enfermedades del pie. De igual manera es necesario seleccionar el sustrato textil y su acabado para el diseño de la prenda así como el sistema embebido que será usado para lograr el objetivo principal.
La organización de este trabajo queda estructurada de la siguiente manera. En la primera sección se presentó la introducción. En la sección dos se describe el desarrollo del trabajo de investigación, donde se definirán algunos conceptos relacionados a la teleoperación, textiles inteligentes, sistemas embebidos, así como la fisiología y enfermedades del pie. En la tercera sección se presentará la metodología a desarrollar para realizar el sistema de relajación podal, para después describir en la cuarta sección los resultados obtenidos. Y finalmente se presentarán las conclusiones.
2. Fundamentación teórica
2.1 Telemedicina y Telerehabilitación
La telemedicina se define como la capacidad de practicar medicina, proveer consultas médicas, diagnósticos y enseñanzas a distancia a través del uso de las telecomunicaciones, telemetría, telepresencia y teleoperación (Podnar, Dolan, & Elfes, 2006). Todas estas aplicaciones permiten el intercambio de información y datos de investigación para así diagnosticar de la manera más exacta al paciente que se encuentra a miles de kilómetros de distancia (Antonini, De Luise, Ruggieri, & Teotino, 2005).
Algunas aplicaciones orientadas a la telemedicina, es da Vinci Surgical System (Intuitive Surgical, 2018) y Robotic Surgical System (Parsell, 2001), ambos sistemas se basan bajo el concepto de cirugía no invasiva y hacen operaciones médicas usando dispositivos mecánicos teleoperados a una distancia corta que les provee de precisión al realizar la operación, aunque la persona que manipula al sistema se encuentra en la misma sala, en donde existe una tarjeta de adquisición de datos que envía la información visual a las cámaras que se encuentran muy cerca (zona de sutura por ejemplo).
En (Arena & Pennisi, 2008) se menciona una aplicación de robots controlados a distancia con fines médicos (telecirugía), el principal objetivo de este trabajo es investigar las ventajas de la visión estéreo (telepresencia) en la teleoperación de robots móviles, reconstruyen el espacio de trabajo del robot, para que se pueda desplazar, usando teleguías basadas en LASSER y en video (retroalimentación visual), en donde además se cuenta con una serie de sensores que ayudan a la tarea anteriormente mencionada.
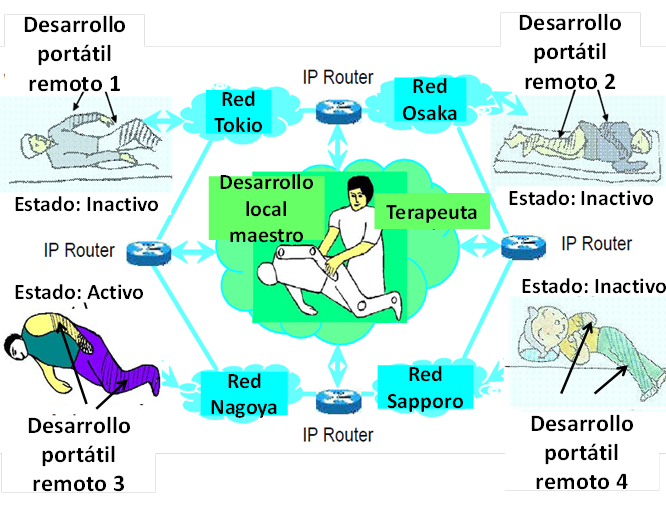
La telerehabilitación de un ser humano a distancia se plantea en (Xiu, Kitagawa, Tsukagoshi, Liu, Ido, & Wu, 2006). Es un ejemplo didáctico de la medicina asistida remotamente (telemedicina) usado en la educación a distancia (EAD) para ayudar a la enseñanza y aplicación de la rehabilitación a distancia de personas (ver Figura 1). Se basa en un esquema de comunicación por internet en donde el terapeuta manipula un sistema de rehabilitación maestro y la información generada por esa manipulación, es enviada a desarrollos portátiles remotos que aplican la misma información enviada.
En el trabajo de (Guerra & de León, 2006) se menciona los requerimientos necesarios para la implementación de una plataforma de teleoperación vía Internet, basada en software, costeable y de fácil instalación. En este caso, la planta a controlar es monitoreada usando servicios de escritorios remotos. En la Figura 2 se muestra el esquema de comunicación utilizada para realizar el control del brazo robótico, se usa una cámara web para monitorear el movimiento y la posición del mismo a partir de la manipulación remota de los valores de referencia locales.

De la fundamentación teórica referente a esta sección, se puede identificar que se han hecho desarrollos que son usados con fines médicos y como referencia el trabajo de (Xiu, Kitagawa, Tsukagoshi, Liu, Ido, & Wu, 2006) es posible desarrollar una variante del sistema de rehabilitación que pueda ser teleoperado tomando como base el desarrollo de (Guerra & de León, 2006), para ser aplicado a la relajación podal.
2.2 Smart textile
En (Sanchez, 2007) se describe que se conocen con este nombre los textiles capaces de alterar su naturaleza en respuesta a la acción de diferentes estímulos externos, físicos o químicos, modificando alguna de sus propiedades, principalmente con el objetivo de conferir beneficios adicionales a sus usuarios. Mientras que (Ayora, 2016) señala que, según sea su actividad, se pueden encontrar con tres generaciones de textiles inteligentes:
Textiles inteligentes pasivos: Constituyen la primera generación de textiles inteligentes, los cuales solamente pueden sentir las condiciones medioambientales o estímulos exteriores.
Textiles inteligentes activos: Estos tienen la capacidad de sentir, pero además reaccionan frente a una determinada situación. Son textiles con memoria de la forma, camaleónicos, termorreguladores, que pueden almacenar calor, absorber el vapor, etc.
Textiles ultra inteligentes o muy activos: Esta tercera generación de textiles no sólo pueden detectar y reaccionar, sino que además se adaptan a las condiciones y estímulos del medio.
(Favero, 2012), describe que los nuevos materiales para fibras y los que forman parte de tejidos, junto a los componentes electrónicos miniaturizados hacen posible la creación de textiles inteligentes, de este modo se crean las verdaderas prendas inteligentes realmente llevables. Los textiles inteligentes pueden clasificarse de la siguiente manera (Farias, 2015): micro cápsulas, hidrogeles, textiles crómicos, tejidos con memoria, tejidos electrónicos y nanotecnologías.
Los tejidos electrónicos hacen referencia a la unión de la microelectrónica y el textil a partir de la incorporación de una nueva propiedad a los polímeros textiles, la conductividad. En la incorporación de elementos electrónicos a la vestimenta humana han sido claves la sustitución de estructuras rígidas por otras flexibles y la miniaturización (Sanchez, 2007).
Los elementos electrónicos usados para los tejidos inteligentes, son piezas electrónicas que se pueden coser a las prendas para darles interactividad con sensores, luces o sonidos, utilizando distintos módulos electrónicos, entre ellos, un sistema embebido (microcontrolador programable), hilo conductor de electricidad y algún tipo de suministro de energía. Esto permite detectar información sobre el entorno mediante el uso de sensores de luz, movimiento o temperatura y como resultado se logran ofrecer respuestas ante los cambios ambientales (Benítez, Ríos, & Marcos, 2017).
En la Universidad Tecnológica “Emiliano Zapata” del Estado de Morelos, se realizó la propuesta de un calcetín Smart textile terapéutico en el reporte de estadía de (González, 2017), que se tomó como base para el desarrollo del prototipo mostrado en este artículo. El proyecto se derivó de la línea de investigación del cuerpo académico con nombre “Ciencias y artes para el diseño, LGA gestión y tecnología del diseño” a cargo de la Dra. Karina Santiago Santiago. En este trabajo se revisó el estado de arte, se determinó los materiales textiles y electrónicos, así como un diseño preliminar del calcetín en conjunto con el sistema electrónico.
2.3 Sistemas embebidos
Un sistema embebido es un dispositivo digital (Microcontrolador DSP, FPGA) diseñado para realizar alguna función o aplicación específica en tiempo real. En un sistema embebido la mayoría de los componentes se encuentran incluidos en la placa base (tarjeta de vídeo, audio, módem, etc.), logrando reducir el costo de los desarrollos tecnológicos hechos bajo este tipo de arquitectura.
Dentro de los sistemas embebidos aplicados al Smart textile, se pueden encontrar algunos ejemplos tal y como en (Benítez, Ríos, & Marcos, 2017) en donde usaron la tarjeta de desarrollo Lilypad Arduino para crear un prototipo de prenda inteligente con monitoreo de temperatura para infantes. En tanto que (Nair, Chowdhury, & Chowdhury, 2016) usan el microcontrolador ATMEGA 8 en combinación con un módulo de bluetooth para monitorear información en forma remota de datos biométricos de atletas. Mientras que (Diaconescu, Vornicu-Albu, Diaconescu, Racea, & Grigoriu, 2015) utilizan el microcontrolador PlC16F690 con el fin de monitorear la temperatura corporal. La desventaja que tienen estos microcontroladores usados es que deben de tener un módulo adicional de comunicación para monitorear parámetros de interés en forma remota.
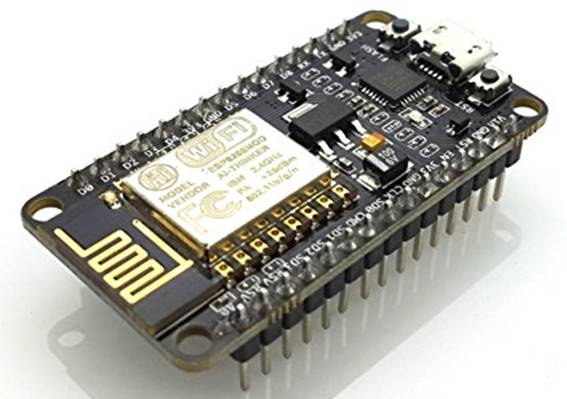
El sistema embebido NodeMCU contiene el microcontrolador ESP8266 de bajo costo con módulo de comunicación inalámbrica integrada a su arquitectura, lo que permite conectarse a redes computacionales usando el protocolo de comunicación TCP (NodeMCU, 2018). Esto es muy útil debido a que puede configurarse para que pueda trabajar bajo un esquema de comunicación cliente servidor. Y si este microcontrolador funge como servidor, se puede desarrollar una página WEB que permite la interacción con el microcontrolador en forma remota, es decir que puede ser teleoperado a partir de una dirección IP, así como un puerto de comunicación virtual (socket). En forma adicional, tiene salidas analógicas PWM, así como una entrada analógica (Convertidor Analógico - Digital) de 10 bits. En la Figura 3, se puede observar una foto de este dispositivo.
A continuación se muestran las especificaciones técnicas del microcontrolador ESP8266 empleado.
Voltaje de operación: 3.3V.
Permite conexión inalámbrica P2P
Consumo de corriente: 10μA - 170mA
Memoria de programa: 16Mbytes
Utiliza el protocolo de comunicación TCP/IP
Velocidad de procesamiento: 80 - 160 MHz
Memoria de datos: 32Kbytes
17 Pines de entrada/salida configurables
Un pin con convertidor analógico digital 10bits
Potencia de salida de +19.5dBm
2.4 Fisiología del pie
El pie es la parte del cuerpo humano que va desde el tobillo hasta la punta de los dedos, y sirve principalmente para caminar y para sostener el cuerpo, su descripción puede realizarse a partir de sus articulaciones, músculos, ligaduras y huesos.
Con respecto a las articulaciones, (Viladot, 2013) describe desde el punto de vista funcional, en donde se puede agrupar las articulaciones en 2 grupos:
Articulaciones de acomodación, que tienen como misión amortiguar el choque del pie con el suelo y adaptarlo a las irregularidades del terreno. Son las articulaciones del tarso y tarso metatarsianas.
Articulaciones de movimiento. Su función es principalmente dinámica y son fundamentales para la marcha. Son la del tobillo y las de los dedos.
De la musculatura del pie (Latarjet & Ruiz, 1983), mencionan que se cuentan 20 músculos, de los cuales uno está ubicado en la cara dorsal y 19 en la cara plantar de pie. En la Figura 4 se puede observar a los músculos del pie.

Con respecto a las ligaduras del pie, de acuerdo con (Zaragoza & Fernández, 2013) explican que los ligamentos del tobillo están divididos en cuatro grupos: ligamentos colaterales mediales (tibiales), laterales (peroneos), los del seno del tarso y los tibioperoneos.
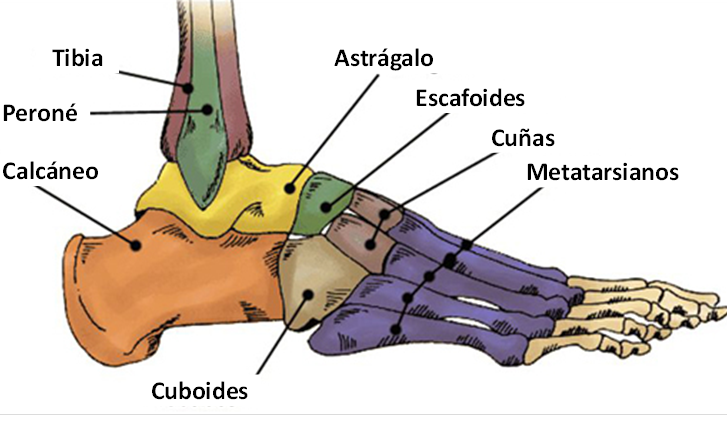
El pie de acuerdo a (Quiroz, 2000) es formado por tres grupos de huesos que de atrás a delante constituyen el tarso, el metatarso y los dedos. En la Figura 5 se puede observar la estructura ósea del pie.
2.4.1 Enfermedades del pie
Cada uno de los pies tiene 26 huesos, 33 articulaciones y más de 100 tendones, músculos y ligamentos. Por ello pueden afectarle muchos problemas de salud. Entre los más comunes se encuentran los siguientes (MedlinePlus, 2018):
Braquimetatarsia (Metatarsos anormalmente cortos),
Dedo del pie en martillo (Deformidad de un dedo en el que adopta una actitud flexionada hacia abajo),
Espolón calcáneo (Calcificación en el talón),
Fibromatosis plantar (aparición de tejido fibroso proliferativo en la aponeurosis de la planta del pie),
Afecciones al dedo gordo del pie,
Neuritis de Morton (engrosamiento del nervio interdigital en el espacio que existe entre el tercer y cuarto dedo del pie),
Pie diabético (infección, ulceración o destrucción de los tejidos profundos que afecta a pacientes con diabetes mellitus),
Pie plano,
Podoconiosis (exposición crónica de los pies descalzos a suelos irritantes),
Queratodermias palmoplantares (engrosamiento anormal de las palmas y plantas) y,
Fascitis plantar.
La fascitis plantar (Cerdeño & Casas, 2014), también llamada talalgia plantar, es un trastorno doloroso del retropié que se localiza en la parte inferomedial del talón. En los individuos adultos es la causa más habitual de dolor en esa región. Puede aparecer en atletas, profesionales o no, en personal militar y en la población general sedentaria. Aunque se piensa que es una lesión producida por sobrecarga mecánica crónica o por sobreuso de larga duración (micro traumatismos repetidos) su etiología no está aun completamente esclarecida. El tratamiento para este padecimiento puede ser a través de fármacos (medicación anti-inflamatoria y analgésica) o mediante el uso de férulas (Férulas nocturnas y Férulas dinámicas).
Hay otro procedimiento médico definido como tratamiento conservador en donde se usa un vendaje funcional para evitar la inflamación por repetidos impactos y la tensión de la fascia con el fin de provocar relajación de la misma. En forma adicional se usa masaje transverso así como termoterapia (Frío aplicado) para reducir la inflamación del tejido.
Entonces, de acuerdo con la investigación y la revisión bibliográfica se determina que el prototipo del sistema teleoperado de relajación podal basado en sistemas embebidos de bajo costo será desarrollado para tratar el problema de la fascitis plantar, el cual ayudará a operar de manera remota la aplicación de frio a la parte afectada para reducir la inflamación del musculo, en conjunto con la aplicación de vibraciones electromecánicas, las cuales se encargaran de relajar el musculo y así disminuir el dolor.
En (González, 2017), se realizó un diseño preliminar de un calcetín terapéutico y se elaboraron pruebas experimentales de termoterapia y sistema de masaje transverso aplicado al problema de la fascitis plantar mediante el uso de celdas Peltier (Sandoval, Espinosa, & Barrahona, 2008) y micromotores respectivamente.
Las celdas fueron caracterizadas con el fin de establecer las condiciones nominales de temperatura de arranque del calcetín terapéutico. Para saber si la temperatura obtenida sobre la cápsula de gel en la celda Peltier era transmitida a los músculos. Se realizaron pruebas sobre un pie en el músculo plantar sin el sustrato textil tal como se muestra en la Figura 6.

La cápsula de gel que tiene como función principal la de retener el frio generado por la celda Peltier al aplicar voltaje en sus terminales. Y con esta prueba se determinó que con un voltaje de 10 volts, se puede generar en la superficie de la celda una temperatura de 7°C que aplicados a la almohadilla de gel por 20 minutos se obtiene una temperatura de 17°C aplicados a la planta del pie.
Posteriormente, se realizó una prueba más, en la que se colocaba el sustrato textil seleccionado (calcetín) con la cápsula de gel; de esta manera se observó que a partir de un tiempo determinado (de 1 a 10 min) la sensación de frio incrementaba, dando así sensación de relajación al músculo plantar y al músculo del talón, de acuerdo al testimonio de la persona puesta a prueba (Figura 7 y 8).


Adicionalmente el autor de (González, 2017), realizó una entrevista con la Dra. Edna Citlalli González Andrés en cuanto a la posibilidad de llevar acabo el tratamiento con este método y comento que el procedimiento puede ser aceptable para la enfermedad en cuestión.
3. Metodología a desarrollar
Con respecto al desarrollo del sistema de teleoperación, se tomó como base el esquema de comunicación mostrado en la Figura 9, el cual fue propuesto por (Valdez, Villanueva, & Vazquez, 2016) para el telecontrol de sistemas con internet.

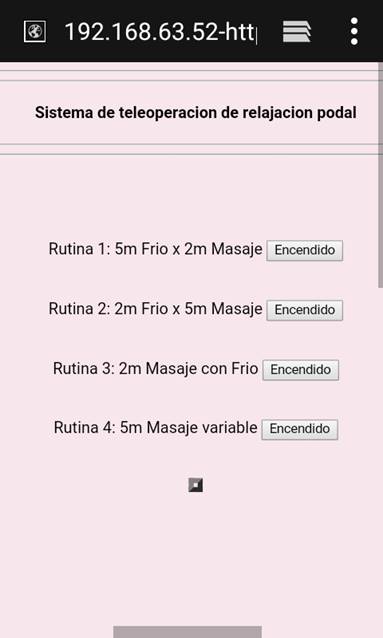
En este esquema de comunicación, el microcontrolador NodeMCU funge como servidor que se encarga de ejecutar las 4 rutinas programadas para realizar la relajación podal mediante el sistema de masaje transverso y el sistema de termoterapia. El cliente hará la petición de la rutina requerida de las 4 posibles a elegir y que se muestran en la Figura 10.

La primera rutina propuesta aplicará frio a la zona afectada por un espacio de 5 minutos para después aplicar vibraciones por un espacio de dos minutos. La rutina 2 aplicará frio a la zona afectada para reducir la inflamación del músculo por un espacio de dos minutos, para después aplicar masaje transverso mediante las vibraciones del motor en un intervalo de 5 minutos. La tercera rutina aplicará frio y masaje al mismo tiempo por un intervalo de 2 minutos. En tanto que la rutina 4 realizará el masaje transverso por un espacio de 5 minutos (no se aplicara alguna variación de temperatura).
En la Figura 11, se observa el diagrama a bloques del circuito electrónico con el sistema de masaje transverso y el sistema de termoterapia.

El sistema de masaje transverso estará manipulado por el microcontrolador y está conformado por una etapa de potencia el cual alimentará a los 3 motores que dependiendo de su voltaje de alimentación, se podrá controlar su velocidad de giro y por consecuencia la intensidad de vibración (masaje) aplicado al pie, en función de las rutinas pedidas.
El sistema de termoterapia está conformado por una etapa de potencia en cual suministra voltaje a un par de celdas Peltier, las cuales se caracterizan por presentar una diferencia de temperaturas entre las dos caras de un semiconductor cuando por el circula una corriente (Sandoval, Espinosa, & Barrahona, 2008).
Para la programación del servidor, se tomó en cuenta el diagrama a bloques que se muestra en la Figura 12. Este programa realiza la configuración del NodeMCU para que pueda comunicarse por internet a través de la red inalámbrica del lugar e inicia al microcontrolador como servidor. Después espera la petición del cliente en función de la rutina deseada y la ejecuta una vez que recibe la indicación, para después confirmar que la tarea o rutina fue hecha y espera una nueva indicación del cliente para ejecutar la misma rutina u otra de las tres no elegidas.

Con respecto al desarrollo del Smart textile fue diseñado tomando como base a (González, 2017) con el fin de tratar a solo una de las enfermedades del pie: la fascitis plantar y de igual manera se pensó que la prenda de ropa que puede servir para implementar el sistema de relajación podal debe ser un calcetín. Para ello el sistema de masaje transverso y el sistema de termoterapia se colocaron en lugares estratégicos en el calcetín con el fin de minimizar el dolor ocasionado por este padecimiento. En la Figura 13, se muestra la propuesta para el sistema de relajación podal, en donde se observa el acomodo de los elementos a utilizar en el calcetín, las cuales se centran en el tejido facial y el músculo del talón, así como la distribución de los motores para el sistema de masaje transverso.
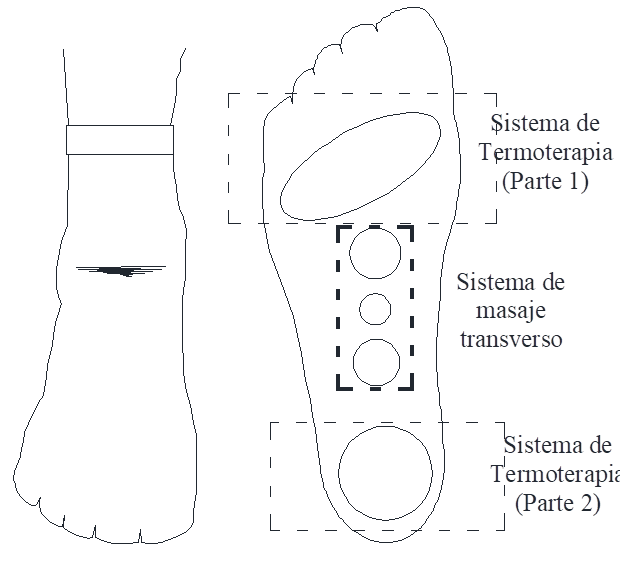
En la Figura 13 en la sección con nombre de sistema de termoterapia (parte 1 y parte 2) del calcetín, se colocarán almohadillas/cápsulas de gel las cuales estarán en contacto con las celdas Peltier y tendrán como fin el de retener el frio generado por ellas. En la sección marcada como sistema de masaje transverso, se colocarán los tres micromotores que tendrán como fin generar las vibraciones que servirán para disminuir la inflamación del músculo del talón simulando un tratamiento fisioterapéutico.
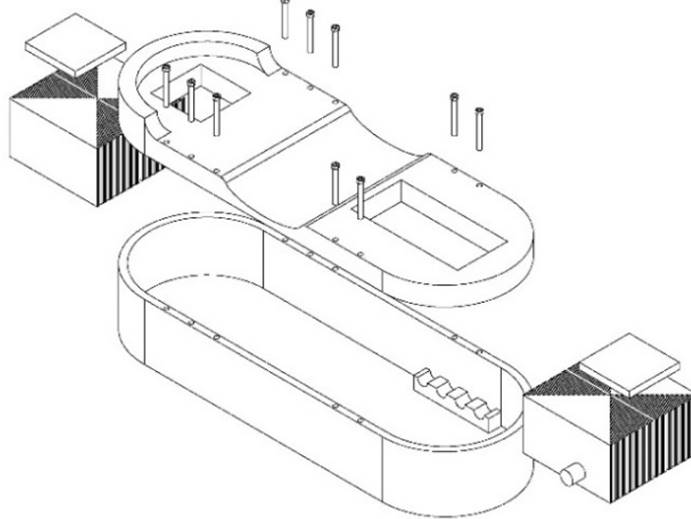
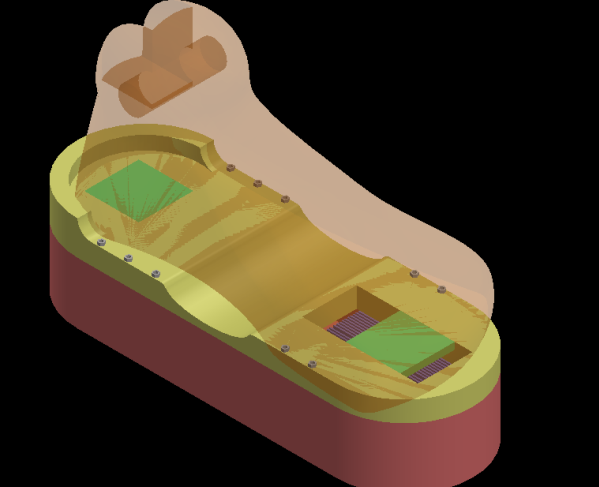
Con el fin de lograr una mejor implementación del sistema de relajación, se realizó un diseño el cual alojará los elementos electrónicos que complementan el desarrollo. Aquí se colocó la celda Peltier, la cual debido a la generación de bajas temperaturas en una cara, en la cara opuesta se genera calor, lo que conllevó a considerar la colocación de un disipador de calor. El modelo final de la carcasa, se puede observar en la Figura 14. Después el modelo realizado fue exportado a un formato de impresión en 3D con el fin de implementarlo físicamente (ver Figura 15).
4. Resultados
Para la inicialización del sistema teleoperado de relajación podal, es necesario conectarse al servidor WEB que fue programado dentro del microcontrolador NodeMCU, para ello es necesario obtener la dirección IP del dispositivo la cual en este caso tiene la dirección 192.168.63.52 (Ver Figura 16).

Entonces al obtenerlo, en un buscador (Google, Internet Explorer, Navegador de Android) se coloca la dirección y así poder entrar al menú de rutinas programadas en el microcontrolador y dependiendo de la elección se ejecuta solo una de ellas. En la Figura 17 se puede observar la captura de pantalla del menú del sistema de teleoperación de relajación podal la cual fue obtenida de un teléfono inteligente con sistema operativo Android 5.1.
Una vez elegida la subrutina en el microcontrolador, éste se encargará de enviar a los actuadores (motores y celdas Peltier) el accionamiento requerido para que funcionen, utilizando un circuito de potencia, que se muestra en la Figura 18.

La salidas de PWM del microcontrolador tienen como máximo valor 3.3 volts con resolución de 210 bits, y como es requerido manipular grandes cargas eléctricas con poca disipación de energía, se empleó un transistor controlado por tensión MOSFET IRFZ44N con el cual se observó que podía manejar la demanda de corriente generada por la celda Peltier a una frecuencia de PWM de 5KHz. Y para encontrar la relación de temperatura en la celda Peltier con respecto al voltaje generado por el PWM del NodeMCU, se realizó un barrido de voltaje en el microcontrolador desde 3.3 volts hasta 0 Volts en intervalos de 0.1 volts, la cual se puede observar en la Figura 19.
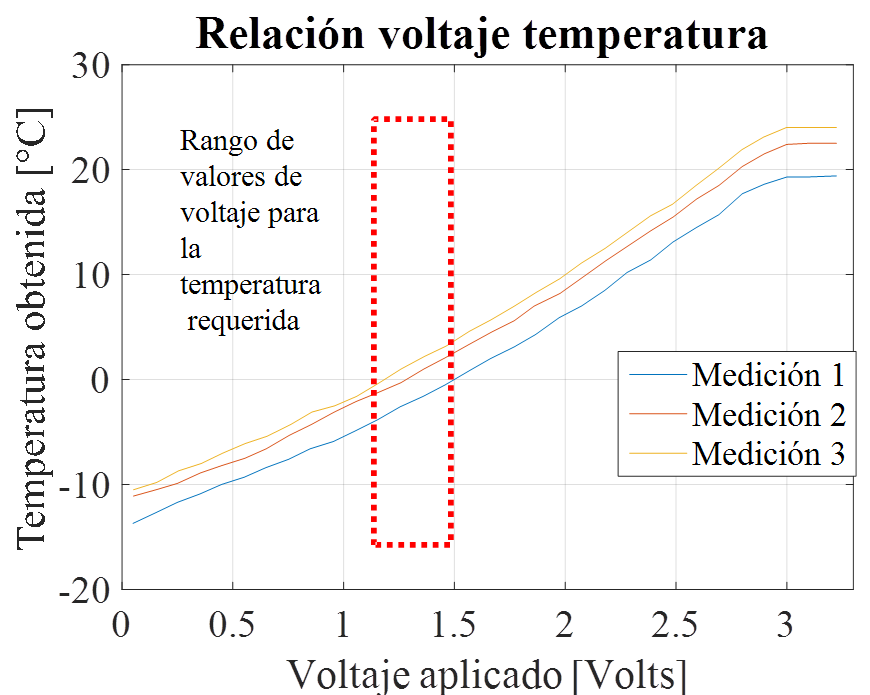
Figura 19 Relación de voltaje generado de PWM en el microcontrolador y la temperatura obtenida en la celda Peltier.
En esta figura (Fig. 19), se puede observar que para obtener una temperatura de 0°C en la superficie de la celda Peltier, se tiene que generar 1.2 a 1.5 volts a la salida de PWM del microcontrolador.
En la Figura 20 se observa la impresión en 3D de la carcasa la cual alojará a la celda Peltier en conjunto con el disipador de calor.

En la Figura 21 se puede observar una foto en donde se encuentran los elementos electrónicos que se usaron para armar el prototipo de relajación podal.

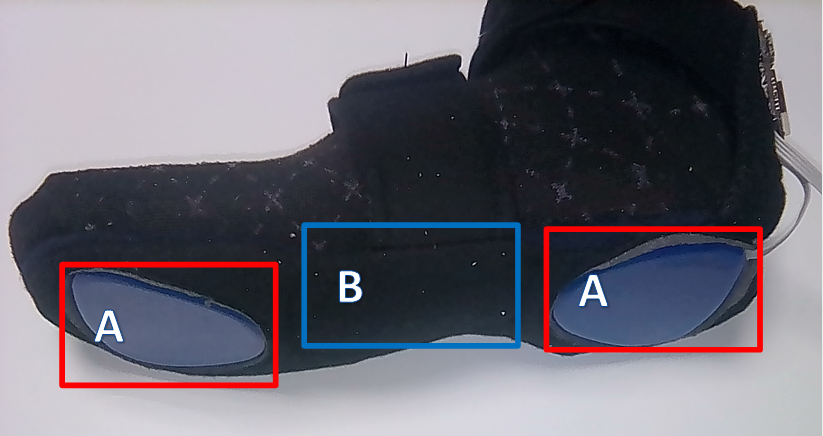
En la Figura 22 se muestra el prototipo del calcetín, con las aportaciones textiles y electrónicas, en donde la sección A muestra la ubicación de los músculos de la planta y el talón del pie, en donde se colocaron cápsulas de gel, las cuales en acompañamiento de las celdas Peltier transmitirían frio a los músculos determinados; la sección B al centro del calcetín, muestra en donde se encuentran los motores, los cuales aportarían vibraciones al pie, estos en conjunto darían relajación y desinflamarían los músculos y de esta manera dar una alternativa no quirúrgica a aquellas personas que poseen fascitis plantar y aún están a tiempo de persistir sin medicamentos y/u otro tipo de tratamientos.
En la Figura 23 se puede observar otra vista del calcetín, en donde se puede apreciar el microcontrolador que realizará las secuencias de relajación mediante el sistema de termoterapia y el de masaje transverso. Se puede ver también los cables que manipulan tanto a los motores del masaje transverso (a la base del calcetín) como a las celdas Peltier (conectadas a la base que contiene a las celdas Peltier, los disipadores así como la sección de potencia).

En la Figura 24 se puede observar el resultado final del sistema ensamblado.

5. Conclusiones
El sistema teleoperado de relajación podal es un textil inteligente útil para tratar la fascitis plantar. El tejido grueso llamado facial que se encuentra en la planta del pie, se puede lograr desinflamar utilizando la rutina de enfriamiento y vibración del sistema teleoperado. Como consecuencia se puede percibir la disminución de las molestias causadas por esta patología. El uso constante de las rutinas contribuirá al bienestar de la salud de las personas que padecen esta enfermedad. El sistema embebido que fungió como dispositivo de control y que forma parte del Smart textile, fue muy útil para generar las rutinas necesarias así como para la interacción del usuario con el desarrollo tecnológico conformado.
El textil inteligente contribuye al desarrollo de innovaciones en el campo de la industria textil en México, su bajo costo permitirá que personas con bajos recursos puedan acceder a este tipo de tecnología. La cual podría ser una alternativa no quirúrgica a aquellas personas que poseen fascitis plantar y aún están a tiempo de persistir sin medicamentos y/u otro tipo de tratamientos.
Otro punto importante de este trabajo es la facilidad del prototipo en adaptarse a una necesidad médica, como es la de dar alivio y relajamiento al pie con ciclos de vibraciones y frio, esto permitirá identificar posibles reacciones que afectan al cuerpo. En donde estas reacciones podrían ser monitoreadas en forma remota para un trabajo futuro.
El principal objetivo en que se enfocó este trabajo fue diseñar un prototipo innovador capaz de adaptarse a distintos tamaños de pie con un control teleoperado sobre la temperatura y las vibraciones producidas en el arco del pie, con el fin de mejorar la calidad de vida de las personas. Para ello, fue fundamental que el diseño desarrollado se centró, a partir de un análisis de expertos, en el área del Smart textile, nanotecnología y electrónica contribuyendo al bienestar del usuario al que se pretende satisfacer. Por su carácter innovador, también aporta una mirada distinta al área de investigación Smart textile que está en permanente desarrollo.

