











 nova página do texto(beta)
nova página do texto(beta) Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
PermalinkIntroducción
En Ramírez de La Cruz (2004) se relata lo siguiente:
A finales del siglo XIX, Henri Poincaré cuestionó la perfección newtoniana en relación con las órbitas planetarias, lo que se conoce como el problema de los tres cuerpos. Planteaba una atracción gravitatoria múltiple, que hasta entonces se resolvía con las leyes de Newton y la suma de un pequeño valor que compensara la atracción del tercer elemento.
Poincaré descubrió que, en situaciones críticas, ese tirón gravitatorio mínimo podía realimentarse hasta producir un efecto de resonancia que modificara la órbita o incluso lanzara el planeta fuera del sistema solar. Los procesos de retroalimentación se corresponden en física con las ecuaciones iterativas, donde el resultado del proceso es utilizado nuevamente como punto de partida para el mismo proceso. El ideal clásico sólo contemplaba sistemas lineales, en los que efecto y causa se identifican plenamente; se sumaban las partes y se obtenía la totalidad. Poincaré introdujo el fantasma de la no linealidad, donde origen y resultado divergen y las fórmulas lineales no sirven para resolver el sistema. Se había dado el primer paso para la teoría del caos (p.16).
Hoy en día, apoyándose en los avances tecnológicos muchos matemáticos se dedican al estudio, generación y aplicación de modelos caóticos, en este trabajo nos restringiremos al estudio de sistemas dinámicos discretos unidimensionales y construiremos modelos inéditos.
El alcance de este trabajo es explicativo, proporciona una familia de sistemas dinámicos inédita, cuyas propiedades se demuestran con el debido rigor matemático; en este sentido, se pueden tomar los ejemplos expuestos para utilizarlos en contextos pertinentes relativos a los sistemas dinámicos discretos.
Debido a que la composición de una función consigo mismo será mencionada con frecuencia; para el resto del trabajo denotaremos con fn -donde n es un entero positivo- a la composición de f consigo misma n veces. Así, estamos en condiciones de dar la definición de punto periódico que será de utilidad en el desarrollo del trabajo.
Definición 1. Sea x0
La definición matemática más aceptada en la teoría del caos se debe a Devaney (1989) y es la siguiente:
Definición 2. Decimos que una función
Existe una
Para cualquier par de conjuntos abiertos
Per(f) es denso en I.
Sin embargo, en Aulbach y Kieninger (2000) se encuentra otra definición que se atribuye a Li y Yorke (una década anterior a la definición de Devaney, 1989), misma que tendrá prioridad en nuestro trabajo:
Definición 3. Una función
En Aulbach y Kieninger (2000) se estudia la relación entre estas definiciones, en particular se tiene que la primera definición (Devaney, 1989) implica la segunda (pero la otra implicación no es válida). En lo que resta del trabajo nos referiremos -cuando el contexto se preste a confusión- a la primera definición usando simplemente "caos" mientras que la segunda se enunciará como "caos en el sentido de Li-Yorke".
En Devaney (1989) encontramos diversos sistemas dinámicos discretos que son caóticos, algunos unidimensionales y otros de dos o más dimensiones, en este trabajo nos restringimos a los primeros, podemos citar la función tienda, la función logística y la función “recorrimiento” (King y Mendez, 2015), éstas han sido tratadas desde ilustración para los conceptos relativos al caos hasta la aplicación en modelos de encriptación (Li y Yorke, 1975), así como modelos económicos (Tarasova y Tarasov, 2017). En el presente trabajo nos enfocamos en construir modelos y exhibir sus propiedades caóticas dejando en segunda prioridad la aplicación,1 en particular presentamos una familia de sistemas dinámicos que dependen de un conjunto de parámetros y buscamos condiciones entre estos, de manera que los sistemas sean caóticos en el sentido de Li-Yorke. La forma de proceder se sustenta fuertemente en los teoremas de Sharkovskii (Devaney, 1989) y del punto fijo para funciones unidimensionales; el primero de ellos se presenta a continuación.
El teorema de Sharkovskii es de gran utilidad para estudiar la existencia de puntos periódicos, para enunciarlo necesitamos “listar” a los números naturales como sigue, que es el orden de Sharkovskii (De Melo y Van Strien, 1993).
Como se observa primero se enlistan los números impares excepto el uno, después se
continúa multiplicando estos números por las potencias de dos, y para terminar se
agregan las potencias de dos en orden decreciente. Se utiliza la notación
Ahora bien, el teorema de Sharkovskii enuncia lo siguiente:
Teorema 1. Sea f: I→ I una función
continua donde Ies un intervalo cerrado y acotado. Suponga que
f tiene un punto periódico de periodo k Si
El teorema argumenta, que las funciones con puntos de periodo tres tienen puntos periódicos de cualquier orden; luego, a partir del trabajo de (Li y Yorke, 1975) "periodo tres implica caos" -Li y Yorke argumentan que la existencia de puntos con periodo tres implica que se verifican las condiciones de su definición de caos-, los sistemas dinámicos unidimensionales son susceptibles a observarse desde la perspectiva del periodo tres. Luego, el procedimiento para "construir caos" es sencillo, basta con definir funciones continuas con dominio y contradominio un intervalo cerrado y acotado I y encontrar puntos fijos de la función compuesta consigo misma tres veces (estos serán los candidatos a ser puntos de periodo tres).
En particular cada función que se presenta en este trabajo tiene una "forma de Z", su gráfica consiste de 3 rectas que "se pegan bien" definidas en el intervalo unitario y con rango el mismo intervalo. Además de la gráfica de cada función en forma de Zeta, se presentan las gráficas de dicha función compuesta tres veces consigo misma para identificar los puntos fijos de esta última los cuales corresponde a candidatos de puntos de periodo tres de la función original. Luego entonces mostramos matemáticamente las condiciones que deben satisfacer los valores de los parámetros, de manera, que se garantice la existencia de periodo tres, y por tanto de caos.
El artículo se encuentra dividido en tres secciones. En la primera, se refieren los aspectos metodológicos, se presenta la definición de la familia de funciones que se abordarán y se presentan los resultados teóricos, con las demostraciones correspondientes, que garantizan la existencia del caos. En la segunda sección se presentan diversos ejemplos donde se exhiben los resultados teóricos y computacionales obtenidos, también se muestra una lista de números generados con una función tipo Zeta junto con los resultados de las pruebas estadísticas pertinentes. La tercera y última sección expone las conclusiones, primero se describe un procedimiento para construir sistemas caóticos y posteriormente una estrategia para generar secuencias de números susceptibles a pruebas de aleatoriedad.
Aspectos metodológicos
Comenzamos definiendo una familia de funciones que por la forma de la gráfica le llamaremos Funciones tipo Zeta y a partir de éstas obtendremos sistemas dinámicos los cuales podrán ser (o no) caóticos.
Definición 4. Sean a, b, c, d, ∈ [0, 1] con 0< b< c <1, definimos una Función tipo Zeta
fa,b,c,d : [0,1] → [0,1] como:
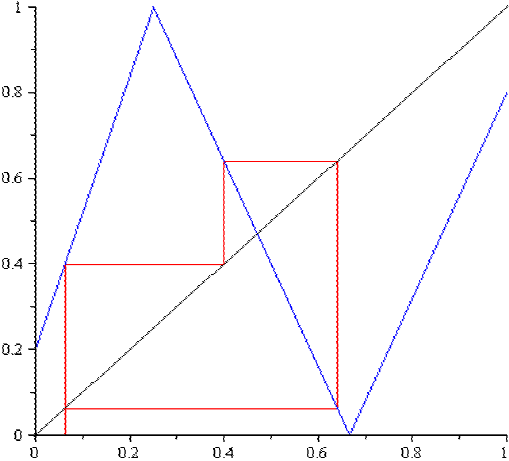
En la Figura 2 presentamos la forma de la gráfica de una función tipo Zeta con parámetros a=0.2, b=0.35, c=0.68, d=0.4


Para cada arreglo de parámetros (a, b, c, d) que definen a una función tipo Zeta identificamos a otra función de la misma familia a la que llamaremos la función dual.
Definición 5. Dada una función tipo Zeta
fa,b,c,d definimos la función dual
de f como la función dada por
Note pues que la función
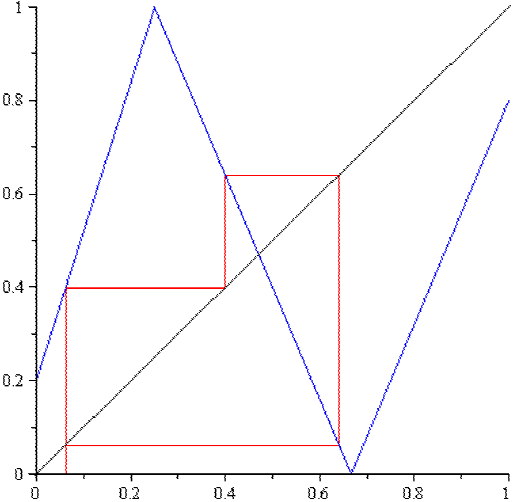
En la Figura 2 se visualiza la gráfica de la función dual asociada a la función representada en la Figura 1.
Cuando no se preste a confusión omitiremos los parámetros (a, b, c, d) y nos referiremos simplemente a las funciones como f y f* y donde una es la función dual de la otra (obsérvese que f**= f)
El siguiente resultado será útil para trabajar de manera operativa con las funciones f y f*.
Proposición 1. Dada la función tipo Zeta f y su función f* se tiene que
f (x)=1-f* (1- x) para todo x ∈[0, 1].
Demostración: particionando el dominio de la función tenemos lo siguiente:
Si x = b , tendremos que
Para el caso x = c , tenemos que
El caso 0 ≤ x < b equivale a 1- b < 1 - x ≤ 1, luego
Cuando b < x < c se sigue que 1 - c < 1 - x < 1 - b, y así obtenemos
Obsérvese que c < x ≤ 1equivale a 0 ≤ 1− x < 1− c, por tanto
Corolario 1. Dada la función tipo Zeta f y su función dual f * se tiene que
Demostración: por inducción matemática.
Como dijimos anteriormente, las funciones tipo Zeta son fundamentales en el desarrollo de nuestro trabajo, ya que a partir de estas generaremos sistemas dinámicos discretos y los estudiamos en el contexto del caos. A continuación presentamos los conceptos básicos relativos a los sistemas y su dinámica.
Para el resto de este trabajo, si A es un subconjunto f denotaremos con f (A) a la imagen del conjunto A bajo la función f.
Las siguientes definiciones son esenciales para el desarrollo de este trabajo.
Definición 6. Sea f una función real
de variable real con
Donde f 0(x0) = x0, además, un punto x0 ∈ I es fijo si f (x0) = x0.
La siguiente definición se debe a Hirsch, Smale, y
Devaney (2004) y habla de un sistema dinámico general pero redefiniendo
el dominio se tiene la definición que necesitamo en nuestro contexto: basta
sustituir
Definición 7. Un sistema dinámico en
En el contexto de la definición 7, recordemos que n = 1 para
sistemas unidimensionales y estamos usando supraíndices para la función
f. Abusando del lenguaje, estamos escribiendo
“f es caótica” para referirnos al respectivo sistema dinámico
discreto inducido por la función f donde
En la definición anterior tenemos que pueden existir puntos a los que conoceremos
como preperiódicos: un punto y ∈
Df es preperiódico si existe un
k ∈
En este orden de ideas, el resultado más importante para el objetivo corresponde a Li y Yorke “Period Three Implies Chaos” (Li y Yorke, 1975), pues basta mostrar que f tiene puntos de periodo tres (y por tanto de todos los periodos) para afirmar que f es caótica en el sentido de Li-Yorke.
Proposición 2. Dada f y su respectiva función dual f * entonces f tiene un punto de periodo 3 si y solo si f * posee un punto de periodo 3.
Demostración:
Por el corolario 1 se tiene que
veamos ahora que 1− x0 no es punto fijo de f *
Por tanto si f posee un punto de periodo tres también f * lo tendrá.
En la Figura 3 podemos observar las gráficas de las funciones f 3 y f *3 asociadas a una función tipo Zeta con parámetros a=0.4, b=0.25, c=0.72, d=0.8, donde los puntos de periodo 3, además de los posibles puntos fijos (de f ) son aquellos donde se intersecta la gráfica función f 3 correspondiente con la de la función identidad.
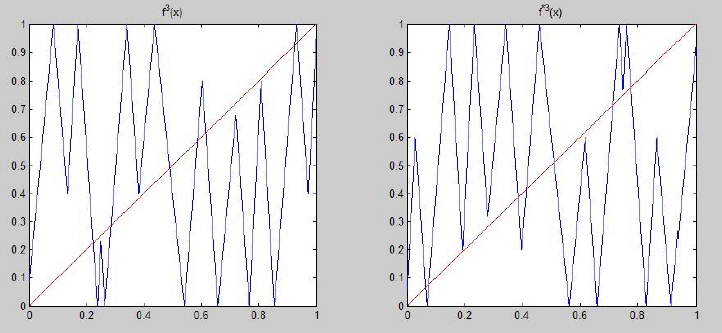
Fuente: elaboración propia.
Figura 3 Representación de los puntos de periodo 3 de una función tipo Zeta y su respectiva función dual
Ahora identificaremos un punto en el dominio de la función tipo Zeta que será relevante en el resto del trabajo.
Proposición 3. Sea f una función tipo
Zeta, entonces
Demostración: sabemos que 0 < b < c < 1, por lo que se obtienen las siguientes desigualdades
Y a su vez
Además, claramente 1 + c - b > 0 por lo que b < xF < c, y así
Proposición 4. Si f es una función
tipo Zeta tal que
Demostración: bajo la condiciones anteriores es claro
que
La Figura 4 presenta la gráfica de f3 para dos funciones tipo Zeta que poseen los parámetros indicados y que cumplen las condiciones de la proposición 4, como se observa, la gráfica de f3 no intersecta a la gráfica de la función identidad -a excepción del punto fijo xF - por lo que no poseen puntos de periodo 3.
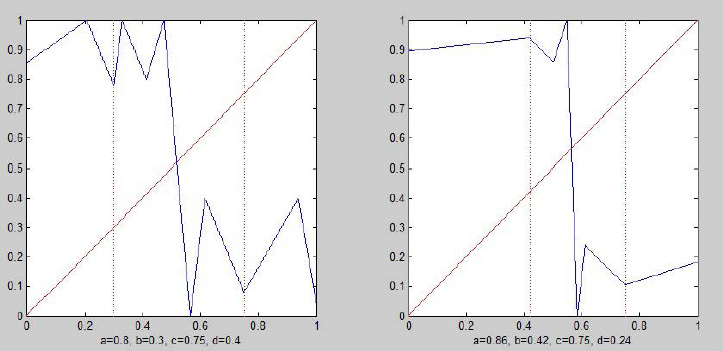
Fuente: elaboración propia.
Figura 4 Ausencia de puntos de periodo tres según las condiciones de la proposición 4
Proposición 5. Sea f una función tipo Zeta tal que a = 0 entonces f posee un punto de periodo 3 en el intervalo (0, b).
Demostración: primeramente notamos que si a = 0 se tiene que f (0) = 0 y f ((0,b)) = (0,1).
Dado que f es continua entonces existen puntos x1, x2 ∈ (0, b) tales que f (x1) = x F y f (x2) = c, además debido a que f es creciente en el intervalo (0,b) tendremos que x 1<x2.
Observe que f 3 (x1) = xF > x1 y f 3 (x2) = 0 > x2.
Definamos ahora la función h sobre el intervalo (0,b) dada por h(x) = f 3 (x) - x.
Debido a que la función f es continua en el intervalo (0,b) tendremos que h es continua también en este intervalo.
Nótese que h(x1) > 0 y
h(x2) < 0 entonces por el
teorema del valor intermedio existe un punto
Verifiquemos finalmente que x0 no es un punto fijo de f:
Puesto que x0 ∈(x1, x2) y debido a que f es creciente en (0,b) tendremos que
f (x0) > f (x1) = xF > x0.
En la Figura 5 presentamos la gráfica de f 3 para dos funciones que cumplen la condición dada en la proposición 5. Igual que en la Figura 3 las intersecciones de la gráfica de la función f 3 con la de la identidad representan además de los dos puntos fijos, los puntos de periodo 3 de ambas funciones.
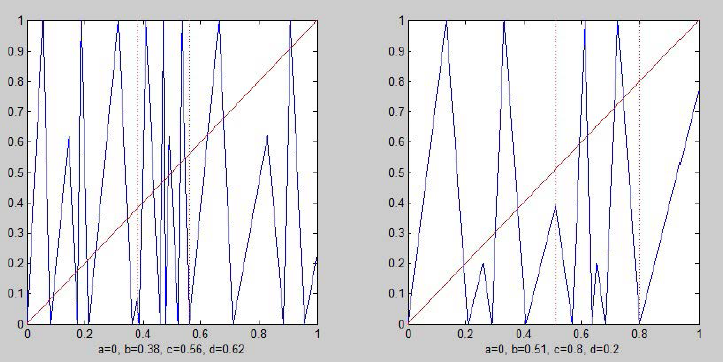
Fuente: elaboración propia.
Figura 5 Puntos de periodo tres dadas las condiciones de la proposición 5
Corolario 2. Sea f una función tipo Zeta, si d =1 entonces f posee un punto de periodo 3 en el intervalo (c,1).
Demostración: ya que d =1 entonces 1 - d =0, luego la proposición 5 implica que f * posee un punto de periodo 3 en (0,1 - c) por tanto f posee un punto de periodo 3 en (c,1) debido a la proposición 2.
Antes de enunciar el siguiente resultado mostraremos dos puntos en el dominio de la función tipo Zeta particularmente ubicados en el intervalo (b,c) que nos serán de mucha utilidad.
Por la continuidad de la función tipo Zeta tenemos que f
(b, xF ) =
(xF ,1) y f
(xF , c) =
(0,xF) por lo que existen puntos
Entonces tenemos la relación b < xc < xF < xb < c.
Una vez conocidos los puntos x c y x b y sus propiedades presentamos nuestro resultado más importante ya que nos brinda las condiciones necesarias y suficientes para identificar si una función tipo Zeta poseerá o no puntos de periodo 3.
Teorema 2. Dada f una función tipo Zeta entonces se tiene que
Si
Si
Demostración:
-
Analicemos primero el caso en que
Recordando que xc < xF y puesto que f ([0, b)) = [a,1). Luego existen dos puntos
Así pues, tendremos que f 3 (x1) = 0 < x1 y f 3 (x2) = x F > x 2.
Al igual que en la demostración de la proposición 5, se define la función continua h(x) = f 3 (x) - x sobre el intervalo [0, b) la cual cumple que h (x 1) < 0 y h (x 2) > 0, por lo que al igual que antes existe un punto x0 ∈ (x1, x2) tal que f 3(x0) = x0.
Aún más, puesto que x0 ∈ (x1, x2) y debido a que f es creciente en (0, b) tendremos que f (x0) > f (x1) = xc > x0, así que x0 no es un punto fijo de f y por tanto es un punto de periodo 3 de f.
Continuemos ahora en el caso d ≥ xb .
Note que d ≥ xb implica que 1 - d ≤ 1 - xb donde utilizando la función dual de f se tiene que f *(1 - xb ) = 1 - f (xb ) = 1 - b.
Es decir f * cumple las condiciones del primer caso que analizamos, luego f * posee un punto de periodo 3, y por la proposición 2 tenemos que f tiene un punto de periodo 3.
Dividiremos la demostración en 4 casos:
-
Caso 1:
La demostración está dada en la proposición 4.
-
Caso 2. xc < a < xF y d ≤ xF
Primeramente notamos que se cumplen las desigualdades f 3(xc ) > xc y f 3(xb ) < xb .
Además f ([0, b]) = [a, 1], por lo que existe un punto x’∈ [0, b] que cumple las relaciones f (x’) = xF y f 3(x’) > x’.
Ahora bien, observe que:
Además sabemos que f es una recta creciente en el intervalo (0, x’] y es una recta decreciente en los intervalos (xc , xF ] y [xF , c) por lo cual f 3 es una recta creciente en el intervalo [0, x’], luego f no posee puntos de periodo 3 en [0, x’] pues f 3(0) > 0 y f 3(x’) > x’.
Continuando, se tiene que:
Por lo cual f no posee puntos de periodo 3 en (x’, xc ].
Ahora, se observa que f ((xc , xF )) = (xF , c) y consecuentemente existe un punto
x’’∈ (xc , xF ) tal que f (x’’) = xb , aún más f 3(x’’) = 1.
Para el intervalo (xc , x’’) tenemos que:
Recordando que f es una recta decreciente en los intervalos (xc , x’’) y (xb , c), además de una recta creciente en el intervalo (0, b) entonces f no posee puntos de periodo 3 en (x c , x’’) pues tendremos que f 3 es una recta creciente en el intervalo (xc , x’’) donde f 3(xc ) > xc y f 3(x’’) > x’’.
Luego, para el intervalo (x’’, xF ) se cumple:
Por lo que f no posee puntos de periodo 3 en (x’’, xF). Prosiguiendo, f tampoco posee puntos de periodo 3 en el intervalo (xF , xb) pues:
Siguiendo ahora con el intervalo (x b , c), evaluando en el intervalo se tiene que f ((xb , c)) = (0, b) por lo cual f 2((xb , c)) = (a, 1) y por tanto existe un punto x’’’∈ (xb , c) tal que f 2(x’’’) = c.
Realizando las evaluaciones para el intervalo (xb , x’’’) obtenemos:
Consecuentemente f no posee puntos de periodo 3 en (xb , x’’’).
Para (x’’’, c) se cumple:
Cumpliéndose pues que f 3(x’’’) < x’’’, f 3(c) < c y que f es una recta decreciente en los intervalos (x’’’, c) y (xc , c) además de una recta creciente en el intervalo (0, b) por lo que f 3 es una recta creciente en el intervalo (x’’’, c); luego f no posee puntos de periodo 3 en l intervalo (x’’’, c).
Finalmente para el intervalo (c, 1):
Por lo tanto f no posee puntos de periodo 3 en tal intervalo.
-
Caso 3:
Comencemos notando que 1 - xb < 1 - d < 1 - xF y
Además, se verifica que f *(1 - xb ) = 1 - f (xb ) = 1 - b; con lo cual f * está satisfaciendo las condiciones del caso anterior, de esta manera f * no posee puntos de periodo 3 y por la proposición 2 tampoco f tiene puntos de periodo 3.
-
Caso 4: xc < a < xF y xF < d < xb
Iniciemos notando que se satisfacen las desigualdades f 3(b) > b y f 3(c) < c.
Además f 3(0) > 0, esto pues:
De manera semejante se tiene que f 3(1) < 1, esto pues se cumple:
Seguidamente f (0, b) = (a, 1) por lo que existe x’ ∈ (0, b) con f (x’) = x F .
De manera análoga al caso 2 se puede mostrar que f no posee puntos de periodo 3 en el intervalo (0, x’] y para el intervalo (x’, b) tampoco los hay pues
Evaluando el intervalo (b, xc ) obtenemos f ((b, xc )) = (c, 1) y por tanto f 2((b, xc )) = (0, d), por lo cual se tiene la existencia de un punto x’’ ∈ (b, xc ) tal que f 2(x’’) = b.
Así, tendremos que:
Y debido a que f es una recta decreciente en los intervalo (b, x’’) y (b, xb) y una recta creciente en el intervalo (c, 1) tendremos que f 3 es una recta creciente en el intervalo (b, x’’), lo cual, aunado con el hecho de que f 3(b) > b y f 3(x’’) > x’’, indica que f no posee puntos de periodo 3 en el intervalo (b, x’’).
Para (x’’, xc) tendremos que f ((x’’, xc) = (c, f (x’’))
En el intervalo (xc , xF) no existen puntos de periodo 3, la demostración es equivalente a la mostrada en el caso 2. Hemos mostrado que f no posee puntos de periodo 3 en (0, xF ) para las condiciones xc < a < xF y xF < d < xb.
Continuando, es claro que, 1 - xb < 1 - d < 1 - xF 1 - xF < 1 - a < 1 - xc , donde 1 - xF es el punto fijo de f * y se cumplen las igualdades f *(1 - x b ) = 1 - f (xb ) = 1 - b y f *(1 - xc ) = 1 - f (xc ) = 1 - c.
Es decir f * no posee puntos de periodo 3 para el intervalo (0,1 - xF ) por lo ya demostrado anteriormente en este caso para la función /, lo cual por la proposición 2 nos conduce a que f no tiene puntos de periodo 3 en el intervalo (xF ,1).
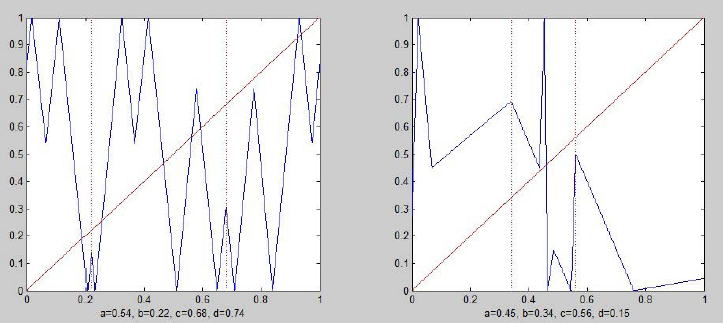
En la Figura 6 podemos apreciar dos gráficas, la del lado izquierdo muestra que la gráfica de f 3 para una función que cumple las hipótesis de la parte i) del teorema 2 si posee puntos de periodo 3 pues hay intersecciones (contando el punto fijo) con la gráfica de la función identidad, en cambio la figura del lado derecho muestra que la gráfica de f 3 de una función que cumple las hipótesis de la parte ii) del teorema no presenta intersecciones con la gráfica de la función identidad (además del punto fijo) por lo que no posee puntos de periodo 3.
Resultados
Para los ejemplos que a continuación mostramos, se generó una aplicación computacional que permite la generación de modelos inéditos de funciones caóticas. Las funciones evaluadas están limitadas por la capacidad computacional,2 referente a componentes irracionales.
Funciones tipo Zeta
A continuación, basados en los resultados teóricos obtenidos presentamos algunos ejemplos de funciones tipo Zeta -fa,b,c,d - con valores particulares en los parámetros cuya dinámica es caótica en el sentido Li-Yorke, y de manera computacional pretendemos ilustrar la sensibilidad a condiciones iniciales (correspondiente a la definición de Devaney).
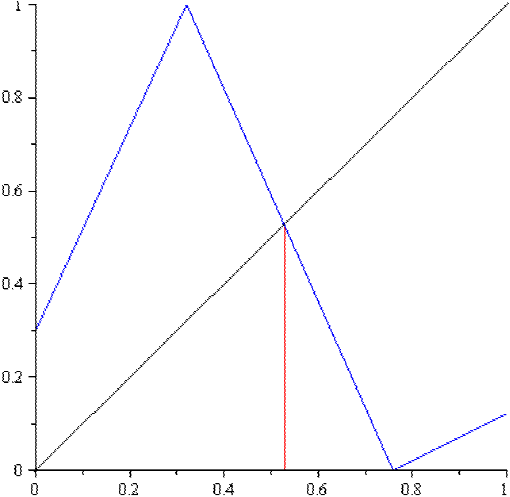
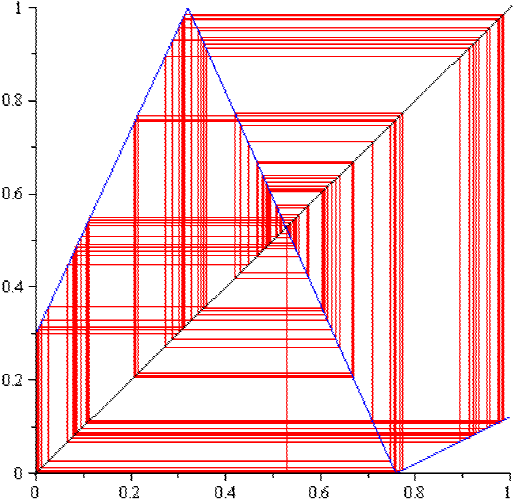
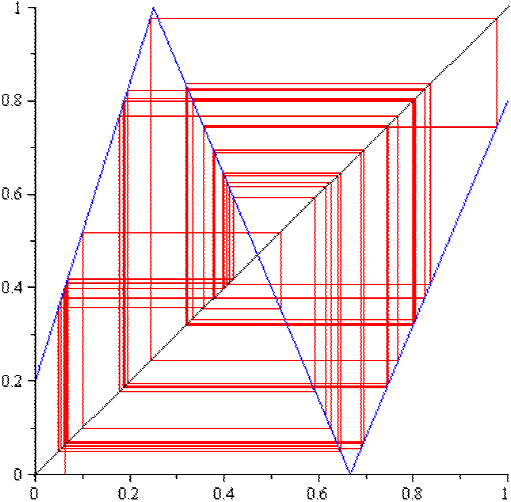
En la Figura 7, tenemos en color azul, la gráfica de la función f 0.3,0.32,0.76,0.12 - las condiciones del teorema 2 se verifican- a su vez, la línea vertical en color rojo ilustra la evaluación del punto fijo 19/36. Mientras que en la Figura 8 evaluamos la función en el punto 19.00001/36, pero la órbita es totalmente diferente a la del punto fijo: el sistema presenta sensibilidad a condiciones iniciales.
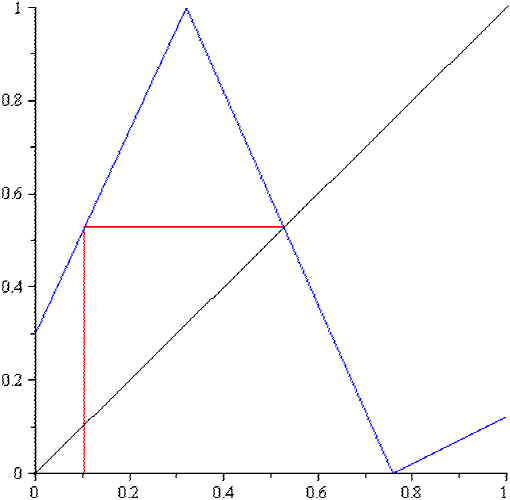
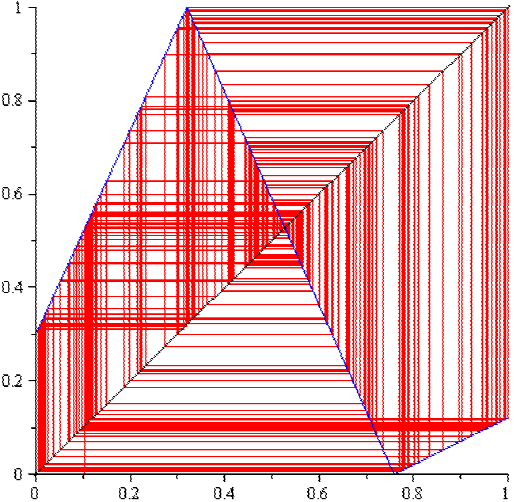
A su vez, en las Figuras 9 y 10 identificamos un punto que en la segunda evaluación se obtiene un punto fijo -un punto preperiódico-, pero en la Figura 11 se observa que una pequeña modificación en la condición inicial genera órbitas diferentes.

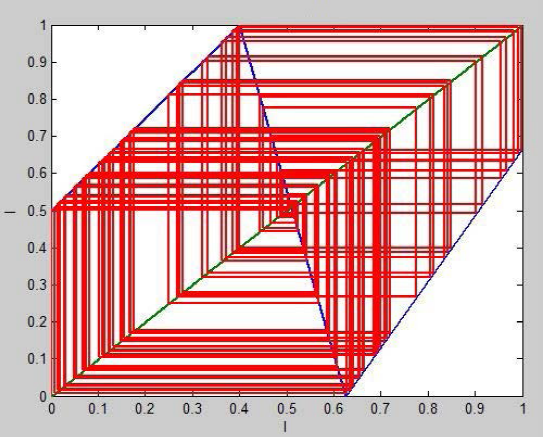
En la Figura 12, tenemos la gráfica de la función f(1/5), (1/4), (2/3), (4/5) − las condiciones del teorema 2 se verifican y se ilustra la evaluación de un punto de periodo 3; observemos que en la Figuras 13 y 14 se ha modificado la condición inicial y por tanto la órbita para los primeros puntos parece ser la misma que la Figura 12; sin embargo cuando se muestran más puntos de la órbita, se aprecia la sensibilidad a condiciones iniciales.
Aplicación a generación de números pseudoaleatorios
Consideremos una función tipo Zeta con parámetros
Los siguientes son puntos de periodo tres:
Si consideramos como punto inicial al número
Tabla 1 Secuencia generada por el punto inicial 1/451
| 0.00221 | 0.50277 | 0.54323 | 0.36338 | 0.95423 | 0.58531 | 0.17639 |
| 0.72049 | 0.16976 | 0.71220 | 0.15503 | 0.69379 | 0.12230 | 0.65288 |
| 0.04956 | 0.56195 | 0.28017 | 0.85022 | 0.40039 | 0.99822 | 0.66351 |
| 0.06847 | 0.58559 | 0.17513 | 0.71892 | 0.16697 | 0.70871 | 0.14883 |
| 0.68603 | 0.10851 | 0.63563 | 0.01891 | 0.52364 | 0.45047 | 0.77566 |
| 0.26785 | 0.83481 | 0.37300 | 0.96625 | 0.60667 | 0.08143 | 0.60179 |
| 0.10313 | 0.62891 | 0.00696 | 0.50871 | 0.51684 | 0.48069 | 0.64134 |
| 0.02906 | 0.53633 | 0.39408 | 0.99260 | 0.65352 | 0.05070 | 0.56338 |
| 0.27385 | 0.84231 | 0.38634 | 0.98293 | 0.63632 | 0.02013 | 0.52516 |
| 0.44369 | 0.80579 | 0.32141 | 0.90176 | 0.49202 | 0.59097 | 0.15120 |
| 0.68900 | 0.11379 | 0.64224 | 0.03065 | 0.53831 | 0.38525 | 0.98157 |
| 0.63390 | 0.01582 | 0.51978 | 0.46762 | 0.69944 | 0.13235 | 0.66543 |
| 0.07189 | 0.58986 | 0.15616 | 0.69520 | 0.12480 | 0.65600 | 0.05512 |
| 0.56890 | 0.24931 | 0.81164 | 0.33182 | 0.91477 | 0.51515 | 0.48818 |
| 0.60807 | 0.07522 |
Fuente: elaboración propia.
Cabe señalar que los números presentados aquí han sido truncados, no redondeados, para facilitar la lectura.
La gráfica de la secuencia generada se presenta en la Figura 15.
En la Tabla 2 se presentan los resultados de las pruebas de aleatoriedad (Coss Bu, 2003) a la secuencia.
Conclusiones
Hemos construido una familia de sistemas caóticos en el sentido Li-Yorke y al mismo tiempo estamos sugiriendo un “proceso para generar caos” el cual lo podemos sintetizar en dos instrucciones:
Defina una función continua de la forma
Construya la función h = f (f (f (x))):
La teoría que fundamenta la validez del proceso son los teoremas de Sharkovskii, del punto fijo y el trabajo de Li y Yorke. Es muy frecuente que se vuelva difícil demostrar directamente con la definición que un sistema dinámico es caótico; sin embargo, el encontrar puntos de periodo tres, tendríamos la respuesta si lo que buscamos es caos.
En este trabajo se mostró analíticamente las condiciones que deben verificar los parámetros para las funciones tipo Zeta que garantizan la existencia de caos en el sentido de Li-Yorke. En particular mostramos una familia de Z's con puntos de periodo tres - y por tanto caóticas en el sentido mencionado-.
Si existe interés en una aplicación de los modelos construidos, se sugiere como primera opción la construcción de listas de números "pseudoaleatorios". A continuación se enumera el procedimiento básico a seguir:
Iniciar con un número arbitrario en el intervalo unitario.
Elegir una de las funciones tipo Zeta que satisfaga las condiciones de periodo tres (el teorema de Li-Yorke garantiza que el sistema inducido es caótico).
Generar la órbita de tamaño conveniente; por ejemplo, ( sería la cantidad de números deseados para la lista).
Con un procesador comparar si hay una repetición en la lista de tamaño L, en caso de existir repetición se desecha la lista (en este caso se tiene un punto de periodo L o preperiódico); en caso contrario se continua con el paso 5.
Aplicar las pruebas estadísticas para validar “la aleatoriedad” de la lista.
Este trabajo fue una propuesta adicional a las existentes en la literatura relativa a los sistemas dinámicos caóticos unidimensionales, así como para identificar la generación de números pseudoaleatorios como una primera aplicación.

