











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink

INTRODUCCIÓN
El método de perturbación (PM, por sus siglas en inglés: Perturbation Method), es un método bien establecido, puesto que ha sido utilizado exitosamente en la solución de diversos problemas científicos y de ingeniería (Chow, 1995; Holmes, 1995; Marinca y Herisanu, 2011; Filobello-Nino y col., 2013a; 2013d; 2014); figura entre los métodos pioneros propuestos, con el fin de aproximar varios tipos de problemas no lineales. Este método fue iniciado por S. D. Poisson y extendido por J. H. Poincare. Aunque el método apareció a principios del siglo XIX, la aplicación de los procedimientos de perturbación, para resolver ecuaciones diferenciales no lineales, se realizó más tarde en ese siglo. Los esfuerzos más importantes se centraron en la mecánica celeste, la mecánica de fluidos y la aerodinámica (Chow, 1995; Holmes, 1995; Marinca y Herisanu, 2011; Filobello-Nino y col., 2013a).
El PM supone que es posible expresar una ecuación diferencial no lineal en términos de una parte lineal y otra no lineal (Chow, 1995; Holmes, 1995; Filobello-Nino y col., 2013a; 2013c; 2013d; 2014). La parte no lineal se considera como una pequeña perturbación, a través de un parámetro pequeño (el parámetro de perturbación). La suposición de que la parte no lineal es pequeña, en comparación con la lineal, es considerada una desventaja del método. Por lo tanto, se han propuesto otras alternativas para encontrar soluciones aproximadas a las ecuaciones diferenciales que describen algunos problemas no lineales, como las basados en: enfoques variacionales (Melchionna, 2017; Mohyud-Din y col., 2017), método tanh (Zahran y Khater, 2016), método exp-function (Ayub y col., 2017; Ravi y col., 2017), método de descomposición de Adomian (Hendi y Al-Qarni, 2017; Asma y col., 2018), expansión de parámetros (Zhang y Xu, 2007), método de perturbación homotópica (HPM, por sus siglas en inglés: Homotopy Perturbation Method) (He, 2006; Khan y col., 2011; Aminikhah, 2011; 2012; Aminikhan y Hemmatnezhad, 2012; Ayati y Biazar, 2015; Mirzazadeh y Ayati, 2016; Lee y col., 2017), método de análisis de homotopía (Abbasbandy y col., 2009; Liu y Wang, 2018), entre muchos otros.
Aunque el PM, proporciona, en general, mejores resultados para pequeños valores del parámetro ε << 1, algunos artículos de la literatura han reportado soluciones precisas en la aplicación de PM a problemas, con las condiciones de frontera de Dirichlet, incluso para valores relativamente grandes del parámetro de perturbación (Filobello-Nino y col., 2013a; 2013c; 2013d; 2014). No obstante, en Filobello-Nino y col. (2013c), se ejemplificó que, en el caso de condiciones de frontera mixtas, PM podría ser menos adecuado, porque esos problemas tienen la dificultad adicional de no proporcionar uno de los puntos finales del intervalo, requiriéndose en algunos casos, de más iteraciones, con el fin de ubicar su posición final. Incluso, hay ecuaciones diferenciales ordinarias, con condiciones de frontera mixtas y de Neumann definidas, de modo que PM es inadecuado para proporcionar cualquier resultado.
La transformada de Laplace (LT, por sus siglas en inglés: Laplace Transform) (o cálculo operacional) ha desempeñado un papel relevante en las matemáticas, no solo desde un punto de vista teórico, sino porque su metodología ha permitido solucionar de manera más simple, muchos problemas de ciencias e ingeniería, en comparación con otras técnicas (Spiegel, 1988). En particular, la LT es útil para resolver ecuaciones diferenciales ordinarias lineales (linear ODES, por sus siglas en inglés: Ordinary Differential Equations) con coeficientes constantes y con condiciones iniciales; además, resulta útil para encontrar soluciones de algunos casos de ecuaciones diferenciales con coeficientes variables y ecuaciones en derivadas parciales (Spiegel, 1988). Por otro lado, las aplicaciones de LT para ecuaciones diferenciales ordinarias no lineales se centran principalmente en encontrar soluciones aproximadas, por lo que Aminikhah (2012) y Aminikhan y Hemmatnezhad (2012) reportaron una combinación de HPM (por sus siglas en inglés: Homotopy Perturbation Method) y la LT deno minada LT-HPM, con la finalidad de obtener soluciones precisas para estas ecuaciones (Aminikhah, 2011; Khan y col., 2011; Aminikhah, 2012; Aminikhan y Hemmatnezhad, 2012; FilobelloNino y col., 2013b).
El objetivo del presente trabajo fue presentar la combinación de la transformada de Laplace y el método clásico de perturbación como una herramienta alternativa poderosa para aproximar la solución de ecuaciones diferenciales no lineales con condiciones de frontera mixtas y de Neumann, de una manera simple, precisa y computacionalmente eficiente.
MATERIALES Y MÉTODOS
Método de perturbación (PM) La ecuación diferencial de un sistema perturbativo no lineal unidimensional (Chow, 1995; Holmes, 1995; Filobello-Nino y col., 2013c; 2013d; 2014):
Donde se asume que:
x es una función de una variable x = x(t)
L(x) es un operador lineal que, en general, contiene derivadas en términos de t
N (x) es un operador no lineal, y
ε es un parámetro pequeño.
Considerando que el término no lineal de (1) es una pequeña perturbación y asumiendo que la solución de (1) se puede escribir como una serie de potencias, en términos de:
Entonces, sustituyendo (2) en (1) e igualando términos con idénticas potencias de ε, se obtiene un número de ecuaciones diferenciales que pueden integrarse, recursivamente, para encontrar sucesivamente las funciones: x 0 (t), x 1 (t), x 2 (t)… de acuerdo al esquema general.
donde t = A y t = B, denotan las condiciones a la frontera del problema.
Del esquema anterior, es claro que x 0 (t) es la primera aproximación para la solución de (1), que satisface sus condiciones a la frontera, mientras que x 1 (t), x 2 (t), x 3 (t)... son las aproximaciones de orden superior, cuyos valores deben ser cero, cuando se evalúan para los mismos valores frontera.
Idea básica de la transformada de laplace (LT)
La LT de F(t) se denota por
Donde: f(s) es una función de un parámetros y denota la transformada de Laplace de F(t).
Entre sus propiedades más importantes está la de linealidad, es decir:
donde c1 y c2 son constantes y,
Otras propiedades de LT empleadas en este estudio fueron:
donde F
(n)
(t) denota la n-ésima derivada de F(t) y
Si la LT de F(t) es f (s), entonces F(t) se llama la LT inversa de f (s) y se expresa por:
Donde
De las ecuaciones (6) y (7) se deduce:
El siguiente resultado se deduce de (5) y denota la propiedad de linealidad
Descripción del LT-PM
LT-PM puede motivarse a partir del método LT, para encontrar soluciones exactas de ecuaciones diferenciales lineales (Zill, 2012). El procedimiento de LT consiste en expresar una ecuación diferencial lineal para alguna función y(t), como una ecuación algebraica, y se resume en los siguientes pasos:
1. Aplicación directa de LT a la ecuación diferencial por resolver.
2. Del paso anterior, se obtiene la denominada ecuación transformada, que es una ecuación algebraica para la LT Y(s) de la función a determinar y(t).
3. Resolución de la ecuación transformada, es decir se despeja Y(s).
4. Aplicación directa de la LT inversa al resultado obtenido en el paso anterior.
5. Obtención de la solución al problema original (para una descripción detallada de este procedimiento consultar por ejemplo Zill, 2012).
El objetivo de esta sección fue mostrar como LT y PM se combinan para encontrar soluciones analíticas aproximadas de ODES como (1) (dada la linealidad de LT).
Para ello, utilizando como guía el esquema mencionado, se aplica directamente la LT en ambos lados de (1), en la forma:
Donde: L{L (x)} es la transformada de Laplace de la parte lineal de la ecuación diferencial; y L{N(x)} es la transformada de su parte no lineal.
usando la propiedad diferencial de (8), se obtiene:
o bien:
aplicando la LT inversa a ambos lados de (14), se obtiene:
De acuerdo con PM, se supone que las soluciones de (1) se pueden expresar como una serie de potencias del parámetro perturbativo ε.
Donde:
Vn denotan un conjunto de funciones a calcularse por el método LT-PM por lo tanto, sustituyendo (16) en (15), resulta:
La comparación de coeficientes de ε con la misma potencia, lleva a determinar las funciones ν0, ν1, ν2,...del siguiente esquema:
Por último, una solución aproximada, se obtiene de sustituir (18) en (16).
Casos de estudio
Con el fin de mostrar la potencialidad de LTPM, se presentan dos casos de estudio, para los cuales, PM resulta inadecuado y fallido.
Caso de estudio 1
A continuación se encuentra una solución aproximada para la siguiente ecuación diferencial no lineal de segundo orden con coeficientes variables y condiciones a la frontera de Neumann.
donde ε es un parámetro considerado en principio, pequeño.
Método 1: utilizando PM
Denominando los términos:
donde la prima denota diferenciación con respecto a x.
Identificando ε con el parámetro PM, se asumirá una solución para (19) en la forma:
Al comparar los coeficientes de potencias iguales del parámetro, se puede resolver para conocer las funciones ν0 (x), ν 1 (x), ν 2 (x), ν 3 (x),... y así sucesivamente.
Para demostrar que PM es inadecuado para este caso, será suficiente considerar la ecuación del orden más bajo:
la solución de la ecuación (22) ν 0 (x) = ax + b, claramente no puede satisfacer simultáneamente sus dos condiciones de frontera. Por lo tanto, PM es inapropiado para encontrar una solución aproximada para este caso.
Método 2: empleando LT-PM
Aplicando la LT a (19), se tiene que:
después de utilizar (8) para el caso n=2 se obtiene:
Resolviendo para Y(s) y aplicando la transformación inversa de LT
donde se define A= y(0), y se usó la condición y´(0)=0
A continuación, se asume una solución para y(x), en la forma:
Sustituyendo (26) en (25):
Al comparar los coeficientes de potencias iguales de ε, se tiene que:
Resolviendo iterativamente las ecuaciones anteriores se obtiene:
y así sucesivamente.
Al sustituir (32), (33), (34) y (35) en (26) se obtiene una aproximación práctica de tercer orden:
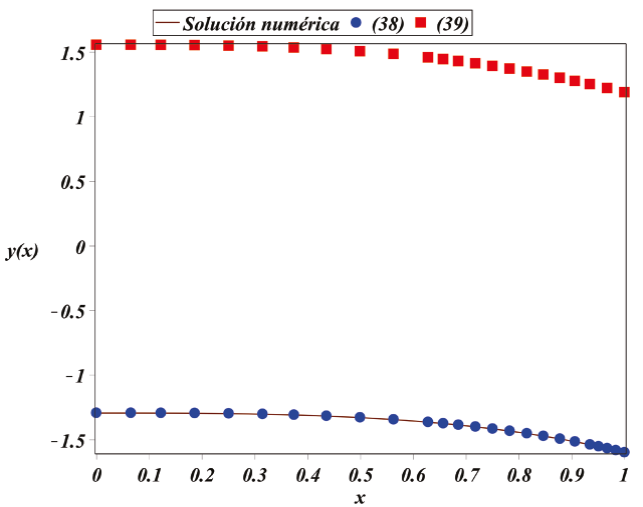
Para calcular el valor de A se requiere que (36) satisfaga la condición de frontera y’ (1)=-1, resultando en una ecuación algebraica para A después de considerar el valor ε =1, como caso de estudio particular, se obtuvieron los siguientes resultados:
Por lo tanto, LT-PM determina no solo una solución, sino dos, que corresponden a los valores de A en (37) (Figura 1):
Caso de estudio 2
A continuación, se considera la siguiente ecuación diferencial no lineal de tercer orden, con condiciones a la frontera mixtas.
donde ε es un parámetro pequeño.
Método 1: Utilizando PM
Se verá que PM no es adecuado para este segundo caso.
Denominando los términos:
donde la prima denota diferenciación con respecto a x.
Identificando con el parámetro de PM, se asume a continuación una solución para (40) de la forma:
Al comparar de nuevo los coeficientes de potencias iguales, como se hizo en el ejemplo anterior, se pueden obtener sucesivamente las funciones v 0 (x), v 1 (x), v 2 (x), v 3 (x),…
Teniendo en cuenta la ecuación de orden más bajo:
La solución de la ecuación diferencial (43), es
donde a, b y c son constantes de integración.
Claramente no pueden satisfacer simultáneamente las condiciones de frontera impuestas al problema, por lo tanto, PM es inapropiado para encontrar una solución aproximada para este problema.
Método 2: empleando LT-PM
Aplicando el algoritmo de LT a (40), se obtiene:
evaluando (8) para n=3 es posible reescribir (44) como:
Resolviendo para Y(s) y aplicando la transformación inversa de Laplace
después de definir A = yʹ(0), y utilizar las condiciones y(0) = 0, y“(0) =0
A continuación, se asumirá una solución en serie para y(x), en la forma:
después de sustituir (47) en (46), se tiene que:
Al comparar los coeficientes de potencias iguales se obtiene:
Al resolver las ecuaciones anteriores, después de usar repetidamente (6), (7), (9) y (10), se obtiene:
y así sucesivamente.
Al sustituir las soluciones (52) - (54) en (47), se obtiene la siguiente aproximación práctica
De segundo orden:
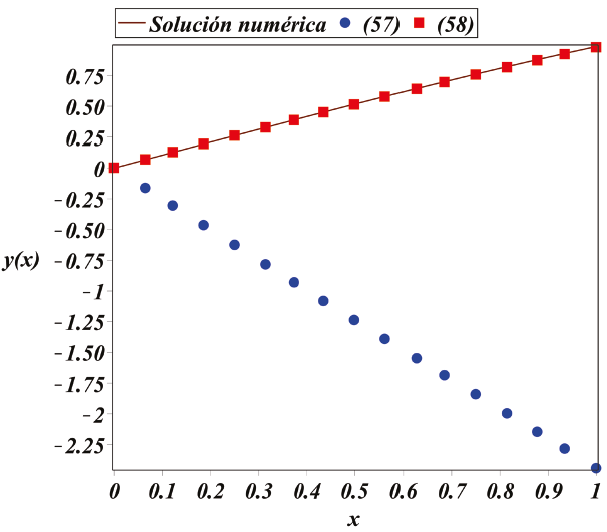
Para calcular el valor de A se requiere que (55) satisfaga la condición de frontera y n (1)=-0.5, resultando en una ecuación algebraica para A. Después de considerar el valor ε=0.3 como caso de estudio, se obtuvieron los siguientes resultados:
Por lo tanto, LT-PM determina dos soluciones aproximadas que corresponden respectivamente a los valores de A obtenidos (Figura 2):
RESULTADOS Y DISCUSIÓN
Este artículo introdujo el método LT-PM, como una herramienta potencialmente útil, en la búsqueda de aproximaciones de soluciones analíticas aproximadas para ecuaciones diferenciales ordinarias no lineales, con condiciones a la frontera mixtas y de Neumann; las condiciones a la frontera de Neumann especifican los valores de la derivada de una solución sobre los puntos frontera del intervalo de definición del problema. Si en su lugar se especifican los valores de la solución en los extremos del intervalo, se refiere a un problema con condiciones a la frontera de Dirichlet. Las condiciones a la frontera mixtas especifican que, se utilizan diferentes tipos de condiciones a la frontera en los puntos frontera del intervalo. Por ejemplo, se puede utilizar una condición de Dirichlet en uno de los puntos extremos y en el otro una condición frontera de Neumann. Tal como se explicó, el método de perturbación con LT surgió de la combinación de la LT y el método PM, y su motivación se encuentra en la conocida aplicación de la LT a ODES lineales. Aunque el método puede usarse para problemas definidos en intervalos abiertos (de la misma manera que PM), así como para problemas de condiciones de contorno de Dirichlet, se vio que su aplicación a ciertos problemas, con condiciones de frontera mixtas y de Neumann, podría ser relevante. Para enfatizar la utilidad de LT-PM, se propusieron dos problemas no lineales, para los cuales, incluso los métodos numéricos proporcionaron únicamente una solución para cada problema. Los experimentos numéricos se realizaron mediante el uso de rutinas incorporadas de Maple para problemas de valores a la frontera (Tabla 1).
Table 1 Maple worksheets.
| Solución numérica y aproximaciones LT-PM para (19). | Solución numérica y aproximaciones LT-PM para (40) |
|---|---|
| restart; with(plots): | restart; with(Optimization): with(Statistics): with (plots): Digits := 12; with(numapprox): |
| #ECUACIÓN DIFFERENCIAL NO LINEAL ec1 := diff(y(x), x, x)+epsilon*x*y(x)*y(x); ics := (D(y))(0) = 0, (D(y))(1) = -1; epsilon0 := 1; sysn1 := eval(ec1, epsilon = epsilon0); |
#ECUACIÓN DIFFERENCIAL NO LINEAL ec1 := diff(y(x), x, x, x)+epsilon*(diff(y(x), x)+2*y(x)*y(x)); sys := ec1; ypa := 2; ics := (D(D(y)))(0) = 0, (D(D(y)))(1) = -1/2, y(0) = 0; epsilon0 := .3; sysn1 := eval(sys, [epsilon = epsilon0]); |
| #SOLUCIÓN NUMÉRICA sol := dsolve({ics, sysn1}, numeric); #POLINOMIO CALCULADO CON LAPLACE PERTURBATION METHOD Ysol := a-(1/6)*a^2*epsilon*x^3+(1/90)*a^3*epsi lon^2*x^6-(1/1120)*epsilon^3*a^4*x^8; |
#SOLUCIÓN NUMÉRICA sol := dsolve({ics, sysn1}, numeric, method = bvp[middefer]); #POLINOMIO CALCULADO CON LAPLACE PERTURBA TION METHOD FX := a*x+epsilon*(-(1/6)*a*x^3-(1/30)*a^2*x^5)+epsilon^2*(( 1/120)*a*x^5+(1/420)*a^2*x^7+(1/7560)*a^3*x^9); FX1 := eval(FX, epsilon = epsilon0); ec2 := eval(diff(FX1, x, x), x = 1) = -1/2; |
| #CÁLCULO DE LAS DOS SOLUCIONES POLI NOMIALES sola := fsolve(eval(diff(Ysol, x), [x = 1, epsilon = epsilon0]) = -1)[1]: solb := fsolve(eval(diff(Ysol, x), [x = 1, epsilon = epsilon0]) = -1)[2]: Ysoln1 := eval(Ysol, [epsilon = epsilon0, a = sola]): Ysoln2 := eval(Ysol, [epsilon = epsilon0, a = solb]): |
#CÁLCULO DE LAS SOLUCIONES POLINOMIALES tt1 := fsolve({ec2})[1]; tt2 := fsolve({ec2})[2]; solx1 := eval(FX1, tt1); solx2:=eval(FX1,tt2); |
| #CÁLCULO DEL ERROR RESIDUAL PARA EL POLINOMIO (38) int((eval(sysn1, y(x) = Ysoln1))*(eval(sysn1, y(x) = Ysoln1)), x = 0 .. 1); #CÁLCULO DEL ERROR RESIDUAL PARA EL POLINOMIO (39) int((eval(sysn1, y(x) = Ysoln2))*(eval(sysn1, y(x) = Ysoln1)), x = 0 .. 1); |
#CÁLCULO DEL ERROR RESIDUAL PARA EL POLINO MIO (57) int((eval(sysn1, y(x) = solx1))^2, x = 0 .. 1); #CÁLCULO DEL ERROR RESIDUAL PARA EL POLINO MIO (58) int((eval(sysn1, y(x) = solx2))^2, x = 0 .. 1); |
| #GRÁFICAS A1 := plot(Ysoln1, x = 0 .. 1, color = blue, numpoints = 17, style = point, symbol = solidcircle, symbolsi ze = 14, legend = [“(38)”], legendstyle = [location = “top”, font = [TIMES, BOLDITALIC, 22]]); A2 := plot(Ysoln2, x = 0 .. 1, color = red, numpoints = 17, style = point, symbol = solidbox, symbolsize = 14, legend = [“(39)”], legendstyle = [location = “top”, font = [TIMES, BOLDITALIC, 22]]); A3 := odeplot(sol, [x, y(x)], x = 0 .. 1, legend = [“So lución numérica”], legendstyle = [location = “top”, font = [TIMES, BOLDITALIC, 22]]); display({A1, A2, A3}, font = [TIMES, BOLDITA LIC, 22], tickmarks = [10, 10], labels = [“x”, “y(x)”], axes = BOXED); |
#PLOTEO DE GRÁFICA A1 := plot(solx1, x = 0 .. 1, color = blue, numpoints = 17, style = point, symbol = solidcircle, symbolsize = 14, legend = [“(57)”], legendstyle = [location = “top”, font = [TIMES, BOLDITALIC, 22]]); A2 := plot(solx2, x = 0 .. 1, color = red, numpoints = 17, style = point, symbol = solidbox, symbolsize = 14, legend = [“(58)”], legendstyle = [location = “top”, font = [TIMES, BOLDITALIC, 22]]); A3 := odeplot(sol, [x, y(x)], x = 0 .. 1, legend = [“Solución numé rica”], legendstyle = [location = “top”, font = [TIMES, BOLDI TALIC, 22]]); display({A1, A2, A3}, font = [TIMES, BOLDITALIC, 22], tick marks = [10, 10], labels = [“x”, “y(x)”], axes = BOXED); |
En particular, la aproximación de menor orden de PM fue inapropiada para satisfacer las condiciones de contorno propuestas, tal como se requiere por el mismo método; a diferencia de lo anterior, LT-PM adoptó una estrategia diferente (Filobello-Nino y col., 2013b). Los métodos como PM incluyen las condiciones de contorno, desde el comienzo del problema, en la aproximación de orden más baja, mientras que LT-PM estima una de las condiciones iniciales desconocidas desde el principio del procedimiento, requiriendo que toda la solución propuesta satisfaga una o más de las condiciones de frontera, de este modo, se asegura que la solución aproximada se ajuste correctamente en ambos límites del intervalo. Lo anterior explica que LT-PM construya soluciones aproximadas analíticas en forma de series rápidamente convergentes y de buena precisión, incluso en el caso de problemas no lineales, considerando grandes valores del parámetro de perturbación, como ocurrió en la solución de (19), donde se usó el valor grande de ε =1, a pesar de que PM proporciona en general, mejores resultados para valores pequeños del parámetro de perturbación antes mencionado.
Además, a partir del algoritmo LT-PM, se calcularon las soluciones analíticas (38), (39) y (57), (58), correspondientes respectivamente a los problemas no lineales (19) y (40). Por lo tanto, a diferencia del método numérico, LT-PM resultó útil para generar soluciones múltiples de problemas no lineales, con condiciones a la frontera, correspondientes a valores diferentes de una condición inicialmente desconocida (37) y (56). Por otra parte, se verificó la precisión de las soluciones propuestas en este estudio (38), (39) y (57), (58), calculando el error residual cuadrático (SRE, por sus siglas en inglés: Square Residual Error) definido por:
donde a y b son dos valores dependientes del problema a resolver; el residuo se define por:
donde
Los valores de SRE obtenidos para las soluciones aproximadas (38) y (39), del problema (19), resultaron ser apenas de 0.000 017 101 943 65 y 0.000 087 034 956 18, mientras que el par de soluciones (57) y (58), correspondientes al problema propuesto por (40) obtuvieron valores de SRE de 0.001 305 538 272 30 y 0.000 123 774 779 692, respectivamente, lo cual confirma la potencialidad de LT-PM.
Por otro lado, de (38), (39), (57) y (58), se observa que LT-PM es también un método capaz de obtener múltiples soluciones (a diferencia de PM). De hecho, las soluciones propuestas son expresiones matemáticas precisas y cortas, ideales para aplicaciones prácticas. Esto contrasta con otros métodos empleados en la búsqueda de soluciones múltiples de ODES no lineales. Por ejemplo, en Abbasbandy y col. (2009), se empleó el método de análisis homotópico (HAM, por sus siglas en inglés: Homotopy Analysis Method) para encontrar soluciones múltiples al problema no lineal de condiciones a la frontera que describe la cinética de algunas reacciones químicas, pero las soluciones obtenidas corresponden a una serie de a proximaciones de 30 y 60 términos. En general, las series de HAM son muy precisas, con buenos resultados, pero a menudo son demasiado largas para las aplicaciones.
De la misma manera He (2006), utilizó un método clásico, el método de Ritz para obtener soluciones múltiples para el problema de Bratu. Aunque el proceso es relativamente simple, el método para obtener una solución aproximada de un problema no lineal, se vale de una función de prueba. Puesto que dicha función requiere, preferentemente, de conocer por adelantado algo de la naturaleza de la solución que se quiere obtener, y dado que no hay una manera sistemática de obtenerla, los resultados obtenidos pueden ser poco exactos. En este sentido, Chow (1995), expuso que la manera de mejorar la precisión del método, requiere a menudo de un incremento del esfuerzo computacional. Estas consideraciones contrastan con la metodología LT-PM, la cual es sistemática, relativamente fácil de aplicar y sus resultados aproximados son muchas veces expresiones cortas, con buena precisión. Cabe mencionar que, como ya se dijo, el método numérico utilizado proporcionó solo una solución numérica para cada caso. En el caso del problema (19) proporcionó la solución correspondiente a (38), mientras que para el problema (40), se obtuvo la solución que corresponde a (58). De hecho, no solo de los valores pequeños del SRE obtenidos se infiere la precisión de las soluciones propuestas en este estudio, sino que de las Figuras 1 y 2 se observa visualmente la precisión antes mencionada para las soluciones 38 y 58.
CONCLUSIONES
Este trabajo propone una modificación de PM, el método LT-PM, con el fin de proporcionar aproximación de soluciones analíticas aproximadas para ecuaciones diferenciales no lineales, con condiciones de frontera. En especial, se consideraron algunos casos de condiciones de frontera mixtas y Neumann, donde el método PM fracasó en la búsqueda de soluciones aproximadas. El procedimiento propuesto consiste en expresar el problema de resolver una ecuación diferencial ordinaria no lineal, en términos de la solución de una o más ecuaciones algebraicas, para una o varias condiciones desconocidas de la ecuación diferencial ordinaria a resolver. Una ventaja de este procedimiento es que, LT-PM permite la posibilidad de obtener soluciones múltiples, mientras que, por el contrario, PM no puede generar este tipo de soluciones, e incluso a veces es incapaz de encontrar al menos una solución, como ocurrió con los casos de estudio propuestos. De lo anterior, y del hecho de que LTPM no requiere de la solución iterativa (muchas veces engorrosa) de varias ecuaciones diferenciales acopladas, como lo requiere PM (de hecho LT-PM utiliza sistemáticamente, LT elementales y propiedades de LT sencillas). Se concluye que el método propuesto resultó eficiente en los casos particulares presentados, y se espera que también sea una herramienta potencialmente eficiente y útil para otros casos de estudio, en particular, aquellos relacionados con aplicaciones prácticas en ciencias e ingeniería. Cabe resaltar que el procedimiento propuesto puede ser implementado para estudiantes que hayan cursado previamente las materias de ecuaciones diferenciales y métodos numéricos.

