











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
El presente trabajo se inspiró en los estudiantes de la carrera de Ingeniería Electrónica del Instituto Tecnológico de Chihuahua del Tecnológico Nacional de México (I.T. de Chihuahua del TecNM). A lo largo de su carrera, estos estudiantes cursan cinco materias de matemáticas y, en los últimos años, se ha notado una separación considerable en aplicar las matemáticas cuando desarrollan algún proyecto de monitoreo o control. Están tan concentrados en hacer funcionar un programa en un hardware que se olvidan de aplicar las matemáticas, herramienta muy útil a la que han dedicado muchas horas de su vida. Por lo tanto, este trabajo se centra en consolidar en un solo documento las herramientas matemáticas para análisis de sistemas, presentar un método para determinar experimentalmente el tiempo de muestreo y crear confianza en el uso de estas herramientas, mostrando su utilidad en el diseño de sistemas de monitoreo y/o control.
Es importante recordar que el modelo matemático utilizado en muchas áreas de análisis de la ingeniería es la ecuación diferencial lineal ordinaria en el tiempo t, que se abordará más adelante. Para facilitar su análisis, se recomienda utilizar la transformada de Laplace s (F(s)) y, para el análisis de sistemas en tiempo discreto, se utiliza la transformada z (F(z)) (Dobelin, 1985; Ogata, 1995). Los modelos en el tiempo y los modelos en Laplace están directamente relacionados, y existen tablas que facilitan el uso de estas teorías. Sin embargo, para relacionar estos modelos con modelos de tiempo discreto, se depende del valor del tiempo de muestreo, es decir, un sistema tiene un modelo único en t y s, pero z tendrá una ecuación diferente si el tiempo de muestreo es diferente.
En la literatura disponible, revisando diferentes áreas de aplicación de sistemas discretos, se puede observar cómo los diferentes autores coinciden en que el tiempo de muestreo es una de las variables más importantes que influye directamente en los resultados obtenidos. Por ejemplo, para el estudio de la teoría de control clásico es indispensable la identificación de sistemas para determinar las características de la planta a controlar y poder diseñar el control más adecuado, como lo muestran diferentes trabajos para la identificación de sistemas de tiempo continuo a partir de datos muestreados (Tuma y Jura, 2017; Figwer, 2018; Ghoul et al., 2016).
También se encuentran trabajos en los que se demuestra cómo el poder computacional del hardware utilizado y el tiempo de muestreo son factores importantes que limitan el desarrollo de aplicaciones en tiempo real (Dobrogowski y Kasznia, 2005). En la misma línea, existen análisis sobre las diferencias en los cálculos de algoritmos en un sistema de medición con computadoras personales a diferentes frecuencias de operación de los procesadores (Dobrogowski y Kasznia, 2007). Se han propuesto métodos para mejorar los sistemas de comunicación multicanal, reduciendo el error en el tiempo de medición con una computadora personal (Dobrogowski y Kasznia, 2013). Se ha hecho énfasis en la importancia de la frecuencia de muestreo cuando se desarrollan sistemas de medición con múltiples dispositivos de medición, y en el cuidado que se debe tener debido a los errores de medición y la interpretación de resultados (Vollmer et al., 2019). Se han desarrollado algoritmos para utilizar diferentes tiempos de muestreo y corregir los principales problemas en procesos industriales modernos, dinámicos y no lineales, mejorando así la calidad de los datos adquiridos (Yuan et al., 2021). Esto incluye la detección y corrección de errores en el tiempo de muestreo (Chakravarthi y Mohan, 2017; Leuciuc, 2017; Neitola, 2020; Qi y Chen, 2018; Quian et al., 2019).
Se ha trabajado en el desarrollo de sistemas de adquisición basados en FPGA para obtener mayor velocidad en el tiempo de muestreo (Krishnamoorthy et al., 2018) y se ha evaluado el impacto que tiene el número de muestras y el tiempo de muestreo en el cálculo de variables, como la estimación de densidad de energía eólica (Gross et al., 2020) y el análisis de los efectos del tiempo de muestreo en una red de un control proporcional integral y una planta de segundo orden (Santhosh y Noronha, 2018).
En la ciencia de los datos, hay trabajos que resaltan la importancia del tiempo de muestreo y la velocidad de procesamiento de la información (Bei-Bei y Xue-bo, 2015). Se destaca la importancia de la utilidad de los datos en la medida en que pueden ser rápidamente analizados para revelar información valiosa. Se demuestra que, con datos de alta calidad, podemos aumentar los ingresos, reducir los costos y reducir el riesgo. Se concluye que la técnica de adquisición de muestras de datos es muy importante e impacta en la calidad de estos (Liu et al., 2019).
Como se puede observar en la literatura consultada, el tiempo de muestreo o su equivalente, la frecuencia de muestreo, es la variable fundamental de estudio y análisis para obtener resultados confiables en muchas aplicaciones como adquisición de datos, control de sistemas, ciencia de los datos, entre otras. El principal problema es la determinación del tiempo de muestreo (T), ya que este depende de las características del hardware a utilizar, la velocidad de la unidad central de procesamiento (CPU), la velocidad de los periféricos de entrada y salida (E/S) y el tamaño del programa a utilizar. Al obtener el tiempo de muestreo, ya podemos hacer uso de la transformada z, la herramienta más utilizada en análisis para describir sistemas en tiempo discreto (Horváth, 2020; Ogata, 1995). Es por ello que el presente trabajo se enfoca en concentrar en un solo documento las herramientas clásicas para el análisis de sistemas en los dominios del tiempo (t), la frecuencia (s) y la frecuencia discreta (z). Además, se presenta un método práctico para determinar el tiempo de muestreo (T) en sistemas con microcontroladores de bajo poder computacional, con el objetivo de desarrollar aplicaciones de monitoreo y/o control. Con este trabajo, se busca facilitar el uso de las matemáticas en los dominios t, s y z, y fomentar su utilización para simplificar el diseño de sistemas de monitoreo y/o control, utilizando simuladores y obteniendo resultados óptimos.
Método
Se utilizaron modelos matemáticos de sistemas en tiempo continuo y en el dominio de Laplace. Como se mencionó anteriormente, el modelo matemático ampliamente utilizado en diversas áreas de análisis de ingeniería es la ecuación diferencial lineal ordinaria con coeficientes constantes (Dobelin, 1985):
Donde:
|
Es la variable de salida o respuesta de un sistema físico. |
|
Es la variable de entrada o excitación del sistema físico |
t -- |
Es el tiempo |
|
Son los parámetros físicos del sistema. |
Definiendo el operador diferencial
El uso de este modelo es generalizado porque esta directo a soluciones analíticas disponibles sin importar el n orden de la ecuación, permitiendo el tratamiento de sistemas lineales de complejidad arbitraria.
En el análisis, diseño y aplicaciones de sistemas de medición y/o control, el concepto de función de transferencia operacional es muy útil. La función de transferencia operacional relaciona la salida q 0 con la entrada 𝑞 𝑖 y se define como (Dobelin 2004):
A partir de la Ecuación (1), se pueden definir los modelos de sistemas dinámicos más comunes: los de orden cero, primer orden y segundo orden (Dobelin, 1985). La Transformada de Laplace se utiliza habitualmente para el estudio de sistemas lineales. La función de transferencia de Laplace se define como la relación entre la transformada de Laplace de la salida y la transformada de Laplace de la entrada, con condiciones iniciales iguales a cero. Por lo tanto, la Ecuación (3) puede reescribirse como se muestra a continuación (Dobelin, 2004):
El modelo de un sistema dinámico de orden cero está definido por la ecuación:
La Ecuación (5) de forma estandarizada se escribe como
La función de transferencia en Laplace es:
El modelo básico de un sistema dinámico de primer orden está definido por la ecuación:
Y su forma estandarizada es:
Donde
Y su función de transferencia en Laplace es:
El modelo básico de un sistema dinámico de segundo orden está definido por la ecuación:
EL modelo estándar es de la forma:
Donde
Modelos matemáticos de sistemas en tiempo discreto, z
La transformada-z (z) es una herramienta importante en el análisis y diseño de sistemas en tiempo discreto. Juega un rol similar al que cumplen la transformada de Laplace en problemas de tiempo continuo.
La transformada-
z
unilateral de una función del tiempo x(t), o de la secuencia de valores x(kT), donde
La transformada-z unilateral es la utilizada en todas las aplicaciones asociadas con sistemas de tiempo discreto ya que el tiempo de muestreo no está definido para valores negativos.
Muestreo mediante impulsos
Se considera un muestro ficticio comúnmente llamado muestreador mediante impulsos. La salida de este muestreador se considera como un tren de impulsos que inicia en t = 0, con el periodo de muestreo igual a T y la magnitud de cada impulso igual al valor muestreado de la señal en tiempo continuo en el instante de muestreo correspondiste. Se supone que
o
La transformada de Laplace de (13) es:
Si definimos
Como se puede observar el segundo miembro de (12) y (15) son exactamente iguales por loque podemos expresar:
En la literatura disponible es fácil encontrar tablas de funciones en el tiempo y sus correspondientes transformadas en Laplace-s o transformada-z (Dobelin, 1985; Ogata, 1995). Por ejemplo, la función en el tiempo
Como se puede observar cualquier función en el tiempo tiene una función única equivalente en Laplace pero tendrá un número infinito de funciones equivalentes en el muestreo mediante impulsos y en la Transformada-z, que dependerá del tiempo de muestreo que se utilice. Es por ello por lo que para utilizar estas herramientas en el diseño y análisis de sistemas es necesario definir correctamente el tiempo de muestreo T.
Análisis de la respuesta de un sistema real de primer orden a una entrada de una función escalón
Para este ejercicio utilizaremos como modelo un circuito básico formado por una fuente voltaje constante V, una resistencia R y un capacitor C (red RC). El voltaje en el capacitor en definido por v
c
(t). El interruptor SW se encuentra abierto en
Aplicando la ley de Kirchhoff de corrientes al circuito de la Figura 1c obtenemos la ecuación:
o
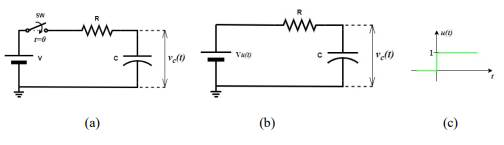
Fuente: Elaboración propia
Figura 1 -Circuito RC. a) Red RC en t˂0 t<0 b) Red RC para t≥0 y c) Escalón unitario u(t).
La Ecuación (19) representa un sistema de primer orden de la forma de la Ecuación (7). Ahora para resolver la ecuación, dividiendo (19) entre C:
Aplicando la transformada de Laplace a (20) y realizando el cambio de variable
Aplicando condiciones iniciales v c (0) = 0
Utilizando las tablas para antitrasformar la Ecuación (23) se obtiene
Con esto se tiene el modelo del sistema de primer orden en el tiempo definido por la Ecuación (24) y su equivalente en Laplace definido por la Ecuación (23). Utilizando tablas de la transformada 𝑧 obtenemos el modelo discreto de circuito de la Figura 1:
Como se puede ver las Ecuaciones (23) y (24) son modelos únicos en 𝑡𝑦𝑠 para el circuito de la Figura 1, pero analizando la Ecuación (25) se observa que existe un número infinito de ecuaciones en 𝑧 que depende del valor que se utilice para el tiempo de muestreo 𝑇. Analizando el circuito de la Figura 2, obtenemos su respuesta al escalón unitario, por medio de (23) y (24) se obtienen las Ecuaciones (26) y (27). Evaluando (25) para cuatro valores diferentes de tiempo de muestreo (

Utilizando (25) para T=0.1s se obtiene:
Utilizando (25) para T=0.5s se obtiene:
Utilizando (25) para T=1s se obtiene:
Utilizando (25) para T = 2s se obtiene:
Utilizando MATLAB® se simularon las Ecuaciones de la (26) a la (28) y se obtuvo la Figura 3, en la que se puede observar como con un tiempo de muestreo de T=0.1 s podemos obtener buena información de la carga del capacitor el análisis de tiempo discreto, Figura 3a. Con un tiempo de muestreo de T =0.5s se pierde información de la carga del capacitor, solo se tienen 4 muestras con respecto a la respuesta en t o s y la primera muestra ya el capacitor llegó a más del 60% de su carga, Figura 3b. Con un tiempo de muestreo de T=1s apenas dos muestras de la carga del capacitor se pueden obtener y como se observa en la Figura 3c, más del 80% de la información se pierde. Con un tiempo de muestreo de T=2s solo se tiene una muestra y el capacitor ya alcanzó más del 90% de su carga, por lo que no se tiene una buena información de la carga del capacitor Figura 3d.
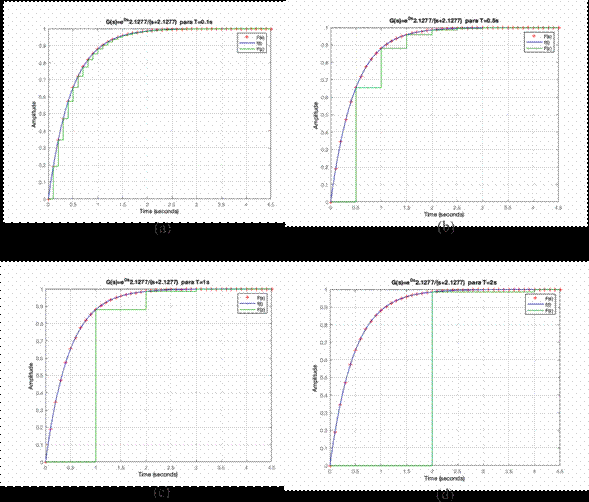
Fuente: Elaboración propia
Figura 3 -Voltaje v(t) de la red RC Figura 2. a) T=0.1s, b) T=0.5, c) T=1 s y d) T= 2s
Hasta aquí se ha demostrado la importancia de definir correctamente el tiempo de muestreo T para obtener información de calidad. Cuando esta información se obtiene por medio de un sistema de adquisición de datos, la tarea de definir el tiempo de muestreo real no es fácil ya que, en un sistema de adquisición de datos real, T dependerá del hardware utilizado y el software desarrollado. El tiempo de muestreo en un sistema de adquisición de datos T m se puede definir como sigue:
Donde el T H es el tiempo empleado por el hardware y el T s es el tiempo empleado en la ejecución del software
Diseño de experimentos para determinar el tiempo de muestreo en un sistema de adquisición de datos con base a la respuesta a una entrada de una función escalón
Para determinar el T s es posible utilizar las herramientas de desarrollo disponibles para microcontroladores, en el que se puede analizar el código ensamblador y estimar el tiempo de ejecución de bloques del programa. Pero esta técnica es factible en microcontroladores pequeños y no esta generalizada para microcontroladores más potentes o para todas las marcas. Por lo que proponemos programar una salida digital como indicador en alto (“1” lógico) del inicio de un programa y cambie a bajo (“0” lógico) al terminar el programa y determinar el T m . Para demostrar este método se utilizó un kit de desarrollo de propósito general el ESP-32-S2 (ADQ) y se armó el circuito de la Figura 4.
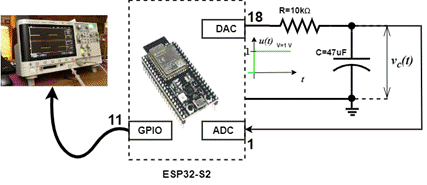
Fuente: Elaboración propia
Figura 4 -Sistema de adquisición para determinar el tiempo de muestreo, T m
El ESP-32-S2 es una herramienta poderosa para desarrollar proyectos relacionados con Internet de las Cosas, Internet of Things (IoT). Sus principales características son (Ozan, 2021):
CPU y Memoria. Es un microprocesador Xtesa® LX6 de 32-bits con un reloj de 240 Mhz y 600 Millones de Instrucciones por Segundo (MIPS). Cuenta con memoria de 448 KB de ROM, 520 KB de RAM y 16 KB de RTC.
Periféricos. GPIOs, ADC, DAC, SPI, I2C, I2S, UART, CAN, IR, PWM, Sensor de contacto y sensor de efecto hall.
Conectividad. Wi-Fi 802.11n (2.4 GHZ) arriba de 150 Mgps.
Consumo de energía. Ultra bajo consumo de energía, Ultra-Low-Power (ULP). 100 μA en modo de suspensión (sleep mode).
Existen diferentes versiones del ESP-32, con conectividad Bluetooth, eMMC/SD, para operación en altas temperaturas, entre otras.
Para determinar el tiempo de muestreo T m utilizando la plataforma de desarrollo de ECLIPSE se desarrolló un programa en lenguaje C/C++. El diagrama de flujo se muestra en la Figura 5, en el que al principio se cargan los “archivos.h” y se inicializan las variables. Después se envía 1 V por medio del convertidor-digital-análogo (DAC) a la red RC e inmediatamente después un puerto digital se pone en “1” lógico indicando el arranque de la entrada escalón a la red RC. A continuación, se lee el valor del de la carga del capacitor por medio del convertidor-digita-análogo (DAC). Se agrega un bloque llamado “Otras funciones” en la cual el usuario puede programar funciones como, procesar la información, desplegar información, comunicar información, entre otras. Después, se envía un “0” lógico al GPIO para indicar el fin del muestreo a la red RC. Estas instrucciones se repiten hasta que la lectura del ADC tenga el valor de 1 V, que nos indica que el capacitor ya se cargó al valor del escalón enviado a través del DAC. Después de que el capacitor se carga termina esa rutina. Ahora se envían 0 V por medio del DAC a la red RC y se lee continuamente el voltaje del capacitor por medio del DAC hasta que su lectura es de O V, lo que indica que el capacitor se terminó de descargar. Luego se repite el programa completo varias veces, para tener la información suficiente y poder hacer mediciones con el osciloscopio. Conectando un osciloscopio a la salida del GPIO se obtiene una señal como se muestra en la Figura 6, esta señal fue obtenida con un osciloscopio KEYSIGHT modelo DSO-X-20002ª.


Fuente: Elaboración propia
Figura 6 -Señal obtenida en el GPIO del ADQ con un osciloscopio DSO-X-20002A.
Siguiendo lo presentado anteriormente se programaron 5 experimentos: En el primero, en el bloque “Otras funciones” del diagrama de flujo de la Figura 5 no se programó nada, lo que nos generó la máxima velocidad del ADQ y se obtiene el menor T m . Después se programaron diferentes retardos en el bloque “Otras funciones” para obtener un tiempo de muestreo de 10ms, 50ms, 0.166s y 0.333s. En la siguiente sección se muestran los resultados obtenidos.
Resultados
Lo primero que se hizo fue medir físicamente el valor de real de la resistencia, R y el capacitor, C utilizado. Los valores obtenidos fueron R=9.76 KΩ y C=48 µF. Con esto recalculamos las Ecuaciones (26) y (27) para
Midiendo la señal del osciloscopio se obtuvo el T m =1.9 ms, es el tiempo mínimo de muestreo, con lo que se obtuvo que la ecuación equivalente en z.
Por medio del programa desarrollado se registraron las lecturas reales obtenidas con el sistema ADQ de la Figura 4. La Figura 7 muestra gráficamente los resultados obtenidos del modelo matemático de la carga de la red RC en t, s, z y el resultado práctico.

Las ecuaciones en z para los tiempos de muestreo de 10ms, 50ms, 0.166s y 0.333s son:
Utilizando (25) para T=10ms se obtiene:
Utilizando (25) para T=50ms se obtiene:
Utilizando (25) para 𝑇=0.166𝑠 se obtiene:
Utilizando (25) para T=0.333s se obtiene:
En la Figura 8 se muestran los resultados de la simulación de las Ecuaciones (30,31) y (33-36) junto con los resultados obtenidos prácticamente a los diferentes tiempos de muestreo programados en el ADQ. En cada grafica se muestran los resultados de los modelos en 𝑡,𝑠,𝑧 y los obtenidos de forma práctica con el ADQ.
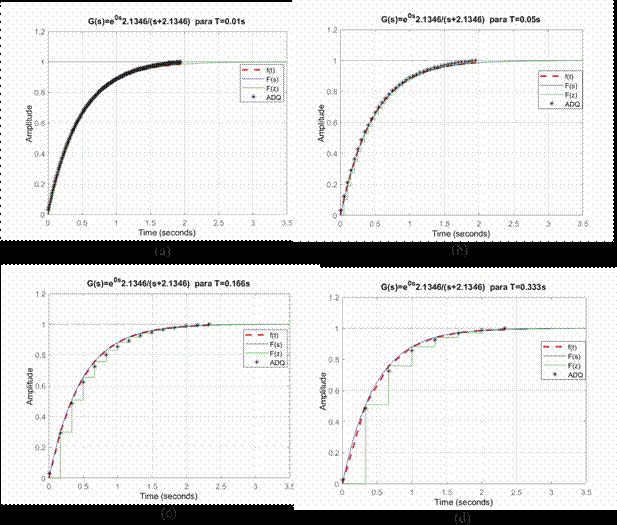
Fuente: Elaboración propia
Figura 8 -Resultados obtenidos con el ADQ a diferentes tiempos de muestreo y la comparación con los modelos obtenidos en t, s y z : a) Tm=10ms, b) Tm =50ms, c) Tm=0.166s y d) Tm=0.333ms
Como se puede observar en la Figura 8 los datos obtenidos prácticamente coinciden con los modelos definidos en t, s, z. Para hacer una declaración cuantitativa de los resultados obtenidos se utilizó la ecuación de la raíz del error cuadrático medio (RMSE) (37). Comparando los resultados calculados con la Ecuación (30) en el domino del tiempo y los valores obtenidos por el ADQ a los diferentes Tm.
Donde
Con los resultados obtenidos se puede demostrar que el método propuesto presenta una buena exactitud para determinar el T m de un sistema de ADQ en el que su respuesta se combina entre el hardware utilizado y el programa que se implemente. Los resultados obtenidos de forma práctica son similares a los datos de los modelos t, s, z. Con los resultados obtenidos en la Tabla 1, se puede comprobar que a medida que el T m es más lento el error se incrementa. Por todo lo anterior se demuestra la importancia de conocer el T m . De esta manera fácilmente pueden ser aplicadas todas las matemáticas aprendidas en la formación de ingenieros, dando como resultado el diseño de sistemas de monitoreo o control más robustos y eficientes. Esta metodología también facilitará el diseño de sistemas de última generación con el enfoque de Internet de las cosas o la industria 4.0.
Discusión
En el presente trabajo se ha presentado el modelado matemático de sistemas en el tiempo con base a la ecuación ordinaria con coeficientes constantes. Su equivalencia en la transformada de la Laplace y la transformada 𝑧. Un ejemplo práctico de estos modelos se muestra en la Figura 1 y Figura 2, una red RC en la que su respuesta a un voltaje de alimentación del tipo escalón unitario se puede representar por la Ecuación (24) en el dominio de 𝑡, por la Ecuación (23) en el domino de 𝑠 y por la Ecuación (25) en el plano 𝑧. También se demostró la importancia del tiempo de muestreo para que exista una buena relación entre los resultados del plano 𝑧 y los modelos en 𝑡𝑦𝑠, como se puede observar en las ecuaciones/xref>) y los resultados gráficos que se presentan en la Figura 3. Como se puede observar entre menor sea el tiempo de muestreo se obtendrá una mejor información del comportamiento del sistema bajo estudio. Lo que concuerda con lo revisado en la literatura disponible sobre el tiempo de muestreo.
Para mostrar un ejemplo práctico sobre este tipo de modelados y comparar los resultados se utilizo un sistema de adquisición de datos como el que se muestra en la Figura 4. En el que se programó en lenguaje C/C++ el diagrama de flujo de la Figura 5. Con esto se obtuvo el tiempo mínimo de muestreo del ADQ que fue de
Simulando la programación de otras actividades en el ADQ se programaron diferentes retardos de tiempo en el bloque “Otras funciones” de programa de la Figura 5. Los modelos en tys no cambian, Ecuaciones (30 y 31) y sus equivalentes en 𝑧 para cuatro diferentes tiempos de muestreo se representan por las Ecuaciones (33-36). Los resultados obtenidos prácticamente y los modelos en t, syz se muestran en la Figura 8. Como se puede observar en las gráficas, existe una concordancia entre los datos obtenidos con el ADQ representados por los asteriscos en la gráfica y la línea verde que representa el modelo en 𝑧. Como se puede observar a medida que el tiempo de muestreo es más lento la información registrada de la carga del capacitor se pierde.
Además, se evalúo cuantitativamente los resultados obtenidos prácticamente y el modelo en el tiempo representado por la Ecuación (30) utilizando el RMSE con la Ecuación (37). Obteniendo un error muy pequeño. Y confirmando una buena concordancia en los resultados prácticos y los modelos matemáticos presentados.
El determinar el tiempo de muestreo para el diseño se sistemas de monitoreo y/o control digital es una parte fundamental. Lo aquí presentado coincide con Tuma y Jura (2017), Figwer (2018) y Ghoul et al., (2016) en el que se expone la identificación de la planta a partir de datos muestreados, permitiendo el diseño de controladores más adecuados.
Además, hemos explicado como el agregar más líneas a un programa en sistema de monitoreo y/o control incrementa el tiempo de muestreo, por lo que en algunos trabajos se necesitará de hardware con mayor velocidad en su poder computacional coincidiendo con lo que expresa Dobrogowski y Kasznia, (2005) y Bei-Bei y Xue-bo (2015), que el poder computacional del hardware utilizado limita el desarrollo de aplicaciones en tiempo real. Por lo que aplicando lo aquí presentado ayudará a los diseñadores, en poco tiempo, a probar y seleccionar el hardware más adecuado para sus aplicaciones.
Es importante resaltar que en la actualidad el uso de sistemas de adquisición de datos se ha generalizado y se requiere que estos generen datos de alta calidad ya que son la base de muchas aplicaciones y como menciona Liu et al., (2019), con datos de alta calidad podemos aumentar los ingresos, reducir costos y reducir riesgos. Los sistemas de adquisición de datos son la base del desarrollo de sistemas de monitoreo y/o control por lo que aplicando las herramientas aquí expuestas podemos garantizar el desarrollo de sistemas que generen datos de calidad.
Conclusiones
En el presente trabajo, se presentó el modelado matemático de sistemas basado en la ecuación diferencial lineal ordinaria con coeficientes constantes, que se utiliza en diferentes aplicaciones de la ingeniería. La función de transferencia operacional en el tiempo y en la transformada de Laplace, se mostraron en el plano s. Se expusieron los modelos matemáticos de sistemas de orden cero, primero y segundo. Además, se presentó la teoría de muestreo mediante impulsos y la transformada z, dado que esta teoría es ampliamente utilizada en el diseño y aplicaciones de sistemas discretos, como el monitoreo y/o control digital.
Los sistemas de monitoreo y/o control modelados con la transformada z tienen múltiples representaciones matemáticas que dependen del tiempo de muestreo utilizado. En la práctica, no es sencillo obtener el tiempo de muestreo, ya que este depende del hardware utilizado y el tamaño del software que se programe. Por ello, a menudo no es fácil aplicar los conocimientos adquiridos.
En este trabajo, se mostró una forma práctica de encontrar el tiempo de muestreo de un sistema de adquisición de datos, con el uso de una red RC y un osciloscopio. Se demostró que es posible obtener el tiempo de muestreo con una buena exactitud y que la respuesta de un sistema es semejante en los diferentes modelos matemáticos y en la práctica. Con esto, esperamos que pueda motivar el estudio y aplicación de sistemas de monitoreo y/o control, y el desarrollo de sistemas más eficientes en los que se aplique lo aprendido en la formación de ingenieros. Además, esta metodología puede ayudar a caracterizar el desempeño de sistemas embebidos y sistemas modernos basados en la filosofía de la Internet de las cosas o la industria 4.0.
Contribuciones a Futuras Líneas de Investigación
El presente trabajo puede contribuir al diseño de algoritmos de control digital basados en la teoría clásica en z. El método expuesto para determinar el tiempo de muestreo puede implementarse fácilmente en cualquier sistema electrónico en el que se desarrolle la aplicación, permitiendo al usuario evaluar si su hardware cumple con los requerimientos del diseño o le permitirá seleccionar el hardware adecuado para su aplicación.
Hoy en día, los sistemas de monitoreo y/o control deben desarrollarse bajo las filosofías de la Internet de las cosas o la industria 4.0, que requieren comunicación con otros sistemas. Por lo tanto, los sistemas de monitoreo y/o control se deben desarrollar teniendo en cuenta los tiempos empleados en la comunicación y análisis de datos. La metodología propuesta puede utilizarse para caracterizar estos sistemas y desarrollar productos más robustos y con mejor desempeño.
En el ámbito educativo, esto permitirá que el estudio de sistemas de monitoreo y/o control sea más completo al relacionar la concordancia entre los modelos matemáticos y la práctica, lo que resultará en programas de estudio mejorados y profesionales mejor preparados.

