nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Los robots son cada vez más populares utilizados como una plataforma educativa. El trabajar con robots es muy estimulante para los estudiantes jóvenes, además de que les permite adquirir importantes habilidades que les ayudarán durante toda su trayectoria escolar e incluso durante su vida diaria, como comprender mejor el enfoque científico, adquirir habilidades para resolver problemas, fomentar su creatividad, desarrollar su espíritu de trabajo en equipo, despertar su interés por investigar, etc. La robótica educativa es un método de aprendizaje basado en la corriente pedagógica del constructivismo que promueve el diseño y la elaboración de creaciones propias.
Se ha demostrado que iniciarse en la robótica les ayuda a los estudiantes a prevenir el fracaso escolar. En el nivel de educación superior, los robots y los kits de robótica permiten al estudiante trabajar con hardware real para estar preparado para los desafíos del trabajo físico real.
Los robots se han ido incorporando paulatinamente en la sociedad, por lo que el número de robots de servicio ya supera a los robots industriales, que era el sector donde se utilizaban con más frecuencia según el Departamento de Estadística en su Encuesta Mundial de Robótica (IFR) en 2008. Actualmente están comenzando un proceso de integración perfecta con la vida cotidiana de las personas, tanto en casa como en la escuela. Este impacto de la robótica social toma aún más importancia cuando hablamos de niños y adolescentes, porque es con quienes los robots pueden ser utilizados para potenciar su desarrollo y crecimiento intelectual.
Por todo lo anterior, debe prestarse mayor atención a cómo los robots educativos pueden integrarse mejor en las vidas de los jóvenes. Con los avances continuos de la tecnología, vale la pena entender el potencial de los robots como complementos efectivos para el aprendizaje. Los robots pueden ser una plataforma divertida para aprender sobre computadoras, electrónica, ingeniería mecánica e idiomas (entre muchas otras cosas). Hay estudios que demuestran que los niños pequeños se desempeñan mejor en las evaluaciones de aprendizaje, además de presentar mayor interés, cuando el aprendizaje de idiomas tuvo lugar con la ayuda de un robot, en comparación con la utilización solo de cintas de audio y libros (Han et al., 2008). Los robots educativos son un subconjunto de la tecnología educativa, en la que se utilizan para facilitar el aprendizaje y mejorar el rendimiento educativo de los estudiantes. Estos proporcionan al estudiante una forma de realización y la capacidad de añadir interacción social al contexto del aprendizaje, por lo tanto se tiene un mejor aprendizaje en comparación al que obtienen cuando el aprendizaje se basa solamente en el software.
En este trabajo, se hace un análisis para proponer el uso de robots en la educación en el Centro Universitario UAEM Valle de Chalco. El principal objetivo de esta investigación es proporcionar una visión general porque no existe un panorama completo del campo de los robots en la educación en la literatura robótica.
Descripción del Método
Contexto del modelo propuesto de RE.
El Departamento de Proyectos Europeos del Instituto Nacional de Tecnologías Educativas y de Formación del Profesorado (INTEF) presenta el informe “The NMC Horizon Report: 2016 Higher Education Edition” que, producido conjuntamente por New Media Consortium (NMC) y EDUCAUSE Learning Initiative (ELI), identifica y describe las seis tecnologías emergentes que tendrán un impacto significativo en la educación superior en cinco años (2016-2020).
Un resumen de la publicación del informe Horizon que presenta la Universitat Jaume I de Castellón, España indica las tendencias, retos y tecnologías importantes que marcan tendencia clave sobre los retos significativos y desarrollos prioritarios que debe considerar la tecnología educativa para la educación superior (2016).
En cada uno de estos apartados del Informe Horizon de 2016, se distinguen tres horizontes de adopción o resolución a corto, medio y largo plazo. El tercer horizonte de adopción presenta los desarrollos importantes en tecnología educativa para la educación superior, considerando proyectos de largo plazo para cuatro o cinco años, como los usos potenciales de la robótica. Con este trabajo se pretende aportar a problemáticas internacionalmente consideradas pero con pertinencia nacional, que involucran diversas líneas de investigación y en casos específicos, como en las carreras de Ingeniería en Computación e Informática Administrativa y en los posgrados de Maestría y Doctorado en Ciencias de la Computación, en el área de Inteligencia Artificial (IA) y Robótica, que incluyen los programas de estudios mencionados del Centro Universitario UAEM Valle de Chalco.
Así también, se tienen que tomar en cuenta los aspectos técnicos y pedagógicos, ya que ambos son necesarios para la evolución profesional de los alumnos. Sin la incorporación de los conocimientos pedagógicos no es posible la evolución en la construcción de conceptos de la Robótica Educativa (RE), pero tampoco es posible dicha evolución si los profesionales que han de participar en ella no poseen los conocimientos técnicos adecuados.
Factores importantes a considerar para desarrollar el aprendizaje con robots.
Con una exhaustiva investigación en la literatura se lograron determinar los siguientes factores, como los más importantes a considerar cuando se pretende aplicar aprendizaje en un aula de clases mediante el uso de robots. Estos factores son los siguientes: ¿Qué es lo que se estudia? ¿Cuándo se estudia? y ¿Cómo se quiere estudiar?.
Por tanto se plantea un modelo con un enfoque constructivista para el diseño de aprendizaje que permite al alumno construir resultados de aprendizaje significativos con intenciones educativas plasmadas en los programas de estudios de las unidades de aprendizaje del área de IA y RE, indicadas a continuación:
El aprender a CONOCER, lo que nos lleva a definir objetivos declarativos que comprenden el aprendizaje de teorías, principios y conceptos.
El aprender a APRENDER, que lleva a la definición de objetivos de desarrollo de habilidades y competencias.
El aprender a HACER contiene objetivos procedimentales relacionados con el aprendizaje de métodos, técnicas y procedimientos.
El aprender a CONVIVIR con otros, que sostiene objetivos que permitan reconocer, respetar y atender las diferencias y la búsqueda de la colaboración.
El aprender a SER, que involucra objetivos actitudinales como la creatividad, los valores, las actitudes y las tomas de decisiones.
Las fases del modelo propuesto están enfocadas en Robótica Educativa y son cinco que consideran diferentes funciones: desde definir qué es aprendido, especificar cómo debe ser aprendido, hasta un proceso de autorización de los materiales a usar, así como la contextualización en actividades cotidianas y familiares al alumno.
Fase 1: Definición del tema de la actividad de aprendizaje
El primer criterio que se debe tener muy claro es el tema del aprendizaje. Las dos categorías principales, aunque bastante amplias, son la robótica y la educación informática (una introducción general de la conciencia de la tecnología que podría denominarse educación técnica) y la educación no técnica (ciencia y lenguaje). La educación técnica es la noción de dar a los estudiantes el conocimiento de los robots y la tecnología. En la mayoría de los casos esto se hace con el objetivo de introducir la informática y la programación y familiarizar a los estudiantes con la tecnología (Balch et al., 2008). En (Mubin et al., 2012) se presenta un estudio donde los estudiantes holandeses de secundaria fueron expuestos gradualmente a temas técnicos utilizando robots. Un plan de lección generalmente implica primero una introducción inicial a la programación del robot (fase de introducción) y luego los estudiantes aplican sus conocimientos prácticamente haciendo que sus robots trabajen (fase intensiva) (Chiou, 2004). La fase de introducción normalmente ayuda cuando los estudiantes no están familiarizados con el uso de robots en la educación. Como los estudiantes también construyen el robot en estas actividades, suelen ser actividades bastante educativas. La actividad de construir su propio robot ha demostrado proporcionar un fuerte sentido de propiedad y un mayor interés en los estudiantes, ya que los estudiantes pueden llevar sus robots a casa, interactuando con ellos durante el tiempo libre, etc. La segunda aplicación más utilizada en el área de los robots en la educación son temas no técnicos (como las ciencias), donde se aprecia el empleo de los robots como una herramienta intermedia para impartir algún tipo de educación en áreas tales como las matemáticas y la geometría (Tertl, 2017). En tales escenarios, el movimiento del robot es típicamente el tema principal sobre el cual se basa el aprendizaje. Por ejemplo, Highfield et al. (2008), en un proyecto ejecutado en Australia los estudiantes discuten el concepto de rotaciones y transformaciones basadas en el movimiento del robot. Otro ejemplo es analizar la trayectoria del camino de un robot para interpretar los ángulos y la geometría. Otros ejemplos de aplicaciones no técnicas de la educación, utilizando robots, son áreas como la cinemática (Mitnik et al., 2008) y la orquestación de la música (Han et al., 2009) realizada en Corea. La tercera aplicación más común en la literatura actual es el uso de robots para enseñar un segundo idioma. Por ejemplo el inglés fue enseñado a los niños japoneses por un robot como se muestra en Kanda et al., (2004) por los investigadores del laboratorio de robótica ATR, Kyoto y en Han & Kim, (2009) el inglés fue enseñado a los niños coreanos con otro robot. Las implicaciones del uso de robots para enseñar un segundo idioma han sido bien documentadas (Chang, 2010) por investigadores de informática en Taiwán, quienes afirman que los niños no son tan vacilantes para hablar con robots en un idioma extranjero como lo son cuando hablan con un instructor humano. Además, los robots pueden comportarse fácilmente de una manera repetitiva mientras los estudiantes están hablando con ellos, permitiendo a los estudiantes practicar sin el problema de un instructor humano cansado. Además, aquí se discute la realización de un robot y sus capacidades sociales como un aspecto importante de la enseñanza del lenguaje. Otra cuestión crítica es que la instrucción del lenguaje requiere un reconocimiento exacto del habla y que es uno de los obstáculos para reconocer el uso de los robots para la enseñanza del lenguaje como se muestra en (Okita et al., 2009). Esta es precisamente la razón por la que algunos investigadores usan técnicas de asistente de Oz (un humano controla el robot detrás de la escena) para ejecutar sus experimentos (Han & Kim, 2009). Para algunos de los estudios antes mencionados sobre el uso de robots para enseñar el lenguaje, se pueden presentar dificultades para alcanzar la validación. Los estudios se llevaron a cabo durante unas pocas semanas y por lo tanto un gran componente de la lengua no se aprendió. La cuarta aplicación más común en el campo de la robótica educativa es cuando los robots se utilizan para el desarrollo cognitivo de los estudiantes, pero no se profundiza sobre esto, ya que esta aplicación no se realizará pues se requiere aplicar en estudiantes en edades de pre-escolar a primaria y estamos enfocados en utilizar la robótica educativa en el nivel universitario.
Fase 2: Delimitar dónde ocurre el aprendizaje
El segundo criterio a considerar es la ubicación de la actividad de aprendizaje. El uso de robots en la educación es intracurricular o extracurricular. Las actividades intracurriculares son aquellas que forman parte del currículo escolar y forman parte del plan de estudios. Incluso se podrían incluir algunas competiciones de robot como parte del aprendizaje formal, ya que tienen lugar hacia el final de la actividad de aprendizaje y son una forma de aprendizaje basado en evaluación (Almeida et al., 2000). El aprendizaje extraescolar (o extracurricular) se lleva a cabo después de las horas escolares en la misma escuela como talleres bajo la guía de instructores, en casa bajo la dirección de los padres; o en otros lugares designados, tales como lugares públicos y eventos. Las actividades extracurriculares suelen ser más relajadas, permiten desviaciones y por lo tanto, son más fáciles de configurar y organizar. Hay varios ejemplos de empleo de robótica educativa curricular en entornos formales (Balch et al., 2008). Una de las principales ventajas de llevar a cabo sesiones informales con robots educativos sobre los avances formales del plan de estudios es que son de corta duración y requieren un diseño mínimo del plan de estudios. Sin embargo, las sesiones informales suelen ser breves y cortas por lo tanto, se puede cuestionar su impacto final.
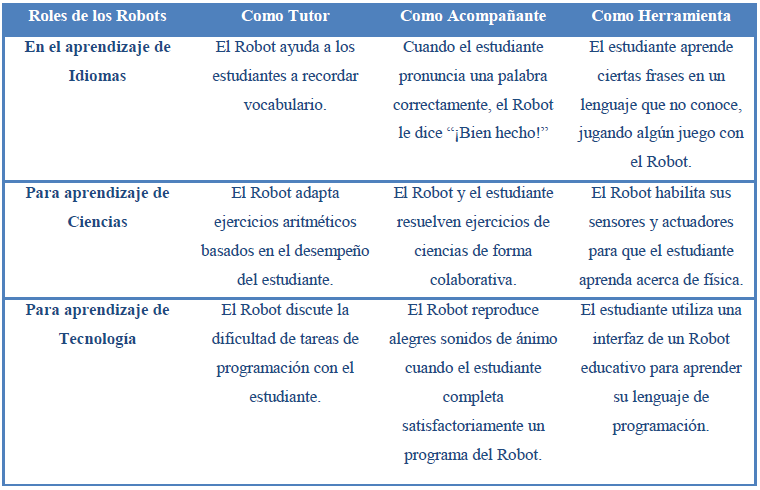
Fase 3: Diferentes roles que desarrolla un Robot durante el aprendizaje
El robot puede asumir una serie de funciones diferentes en el proceso de aprendizaje, con diferentes niveles de participación en la tarea de aprendizaje. La elección depende del contenido, el instructor, el tipo de estudiante y la naturaleza de la actividad de aprendizaje. En primer lugar, por un lado el robot puede asumir un papel pasivo y ser utilizado como una herramienta de aprendizaje didáctico. Esto se aplicaría especialmente a la educación en robótica, donde los estudiantes estarían construyendo, creando y programando robots. Por otro lado, el robot puede asumir el papel de compañero y tener activa participación espontánea (Okita et al., 2009), donde el enfoque se centró en el aprendizaje cooperativo con el robot, o incluso ser receptor de atención (Tanaka & Matsuzoe, 2012), donde los estudiantes aprenden inglés en el camino mientras enseñaban a un robot. El papel de un robot como mentor también se ha discutido en (Goodrich & Schultz, 2007). Sin embargo, es evidente que antes de que el robot pueda asumir el papel de un mentor autónomo, los avances tecnológicos son necesarios en las habilidades perceptivas de los robots sociales. En resumen, podemos definir tres categorías principales del rol de un robot durante la actividad de aprendizaje: herramienta, compañero o tutor (en la Tabla 1 se muestran y explican estos tres papeles y se dan algunos ejemplos). De todo esto podemos deducir que se necesita trazar un mapa claro que vincula la actividad de aprendizaje con el estilo de interacción del robot. Por ejemplo, para tareas básicas de aprendizaje se prefirió un robot cooperativo en comparación con un robot de instrucción (Okita et al., 2009), pero para el aprendizaje de idiomas se prefirió un estilo de tutoría (Saerbeck, 2010). Esta decisión también se rige por la percepción de los estudiantes. Se ha demostrado que los niños más pequeños se contentaban con que los robots se comportaran como compañeros en el proceso de aprendizaje mientras que los niños mayores pensaban en los robots más como herramientas de enseñanza. El grado de comportamiento social del robot está más o menos relacionado con el papel que desempeña el robot durante la actividad de aprendizaje, el dominio del sujeto y la edad de los alumnos. Según Okita et al. (2009), se comprobó que los estudiantes preferían un comportamiento y una voz de tipo humano para el robot. Otros atributos tales como mantener el contacto visual también han sido discutidos en (Johnson et al., 2000) para atraer a los estudiantes. Para el aprendizaje de idiomas y el desarrollo cognitivo, la interacción social es imprescindible, tal como lo sugieren Shin & Lee, (2008) (aunque puede no ser esencial para la educación técnica). Se llevó a cabo una encuesta de dos robots con respecto a 4 semanas de uso en el hogar y la escuela. Los dos robots eran un humanoide sin emociones y un perro robótico animado. La conclusión fue que los estudiantes preferían el perro robótico. Resultados similares fueron obtenidos por Moreno et al., (2001), donde se encontró que un agente social generaba mucho más interés en comparación con un agente menos social y por (Saerbeck et al. 2010), donde un robot más social llevó a mayores puntuaciones en evaluaciones posteriores que empleando en la enseñanza un instructor humano. La restricción de la forma en que un robot "mira" físicamente es más flexible; por ejemplo, un robot humanoide podría usarse potencialmente para enseñar a cualquier sujeto. Sin embargo, investigaciones previas ha examinado los atributos físicos de un profesor robótico. Según Ryu et al. (2007), se presenta un análisis cuantitativo de las dimensiones preferidas de las características físicas de los robots humanoides educativos.
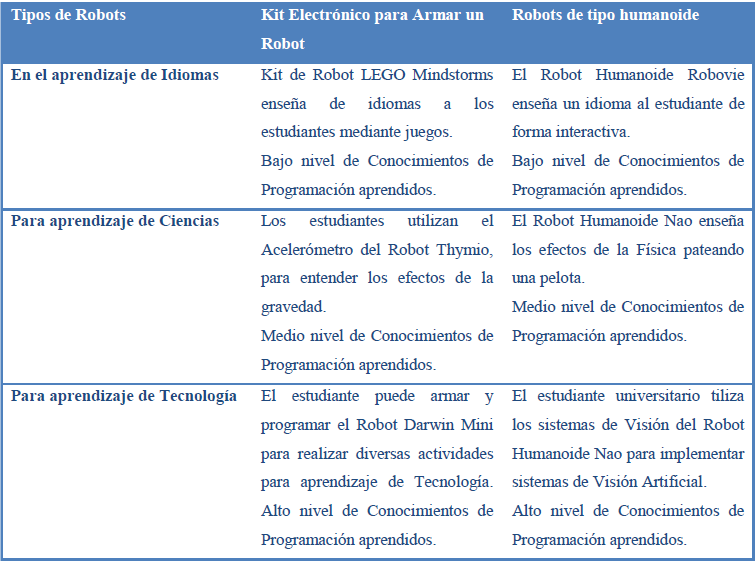
Fase 4: Tipos de robots que se utilizan en educación
La realización del robot es también un factor crítico en la actividad de aprendizaje. Existen numerosos kits robóticos, que van desde kits de bajo costo de una sola función a robots humanoides que cuestan miles de dólares. Para explorar las diversas opciones, podemos considerar una hipotética escala progresiva de encarnación. En un extremo de la escala podría haber los kits mecánicos de una sola función de bajo costo que se usan típicamente para ilustrar solamente una función, tal como seguir una línea o reaccionar a la fuente de sonido. Más abajo en la escala, tenemos kits que proporcionan la opción de educar sobre no solo sobre robótica, sino también electrónica. Estos kits son completamente programables y los estudiantes también pueden construir robots y cargar scripts en ellos. Finalmente estarían los kits que permiten una mayor libertad mecánica y flexibilidad con el diseño del robot como los LEGO Mindstorms. Se ha demostrado que los robots Mindstorm enseñan una amplia gama de temas que van desde el lenguaje (Mubin et al., 2012), la informática/programación (Powers et al., 2006), la física (Church et al., 2010), el diseño de ingeniería (Ringwood et al., 2005) y la robótica (Hirst, 2003). Además, tenemos a los robots como agentes plenamente encarnados usados tanto en la educación formal como en la informal, como el robot humanoide NAO (Tanaka & Matsuzoe, 2012), los robots encarnados como animales de compañía o personajes de juguete. Estos robots tienen la capacidad de participar en la interacción social, en virtud de ser capaces de hablar y exhibir expresiones faciales. En la mayoría de las situaciones, estos robots se utilizan para enseñar temas no técnicos tales como el lenguaje o la música, que requieren que el robot se involucre en alguna forma de interacción social con el estudiante. No todos los kits robóticos serán atractivos para todo tipo de estudiantes.
Por ejemplo, no podemos esperar que los niños pequeños construyan robots complejos o incluso los utilicen. Por el contrario, para atraer a los niños pequeños, el robot debe tener características animadas. Por lo tanto, es adecuado para enseñar materias como la matemática (Highfield et al., 2008) y la programación (Stoeckelmayr et al., 2011) a niños pequeños. En general, los robots educativos deben estar diseñados para tener en cuenta la edad y los requisitos de los estudiantes o deben ser adaptables en tiempo real. Por ejemplo, como se muestra en Ruvolo et al. (2008), se desarrolló la tecnología robótica que permitió a un robot "Asobo" adaptar su comportamiento basado en el estado de ánimo prevalente de los niños pequeños. En última instancia, la elección de qué robot utilizar en la actividad de aprendizaje depende de varios factores: costo, dominio que se requiere obtenga el estudiante y su edad. Proporcionamos algunos ejemplos sobre el tipo de robots empleados para cada tipo de dominio requerido por el usuario en la Tabla 2. Se indica en cada celda el nivel de habilidades de programación adquiridas por los estudiantes al usar cada tipo de robot.
Fase 5: Selección del robot que permite implementar las mejores estrategias para el desarrollo de competencias
Una vez analizados todos los roles y funciones que aportan los diferentes tipos de robots con los que se cuenta hoy en el mercado, logramos determinar que el Robot Mini Darwin de la marca Robotis nos va a brindar las mejores características que permitirán implementar estrategias para fomentar el desarrollo de competencias de diversos tópicos que requieren desarrollar los estudiantes de los programas educativos del área.
Se eligió este Robot sobre otros que existen en el mercado porque presenta características que lo hacen ideal para poder desarrollar importantes competencias en los estudiantes de licenciatura, empezando por que el Robot viene totalmente desarmado con herramientas e instructivo para armarse, lo que permite de entrada que los estudiantes realicen trabajo en equipo para poder completar satisfactoriamente el armado del Robot Darwin Mini. Una vez armado, es posible interactuar con él mediante una aplicación móvil que le permite funcionar en los sistemas operativos Android e iOS (aunque para este último requiere la adquisición de un módulo especial) lo que lo hace muy atractivo para los estudiantes al poder programarlo e interactuar con él a través de cualquier celular o tablet que es una herramienta que ellos manejan de forma cotidiana, pero además también lo hace ideal para fomentar el aprendizaje en grupo. La Figura 1 muestra el Robot seleccionado para implementar las Estrategias para el desarrollo de competencias en nuestros estudiantes.

Así mismo se desarrolló una prueba para poder evaluar el aprendizaje de dos grupos de 15 estudiantes cada uno. La prueba está conformada por 90 preguntas divididas en 5 áreas, distribuidas de la siguiente forma:
Matemáticas (Lógica, Geometría y Trigonometría) aportó 30 preguntas
Robótica Básica aportó 15 preguntas.
Robótica Avanzada aportó 15 preguntas.
Programación Básica aportó 15 preguntas.
Programación Avanzada aportó 15 preguntas.
Este instrumento nos permitió evaluar el desempeño de los dos grupos de estudiantes. En el primero fueron vistos los temas de forma teórica en el aula mediante diapositivas, para preparar al grupo para poder realizar la evaluación. El segundo grupo vio los temas mediante prácticas con el Robot Darwin Mini lo que facilitó el aprendizaje de la mayoría de los temas, como se puede apreciar en la Tabla 3, que muestra el promedio de la evaluación obtenida por cada grupo de estudiantes y por cada área en una escala de 0 a 100. Los resultados obtenidos demuestran que el grupo de estudiantes que aprendió los temas utilizando como herramienta el Robot Darwin Mini, logró obtener un conocimiento más sólido y adquirido de una forma más didáctica y amistosa, en todas las áreas del conocimiento evaluadas.
Tabla 3 Resultados Promedio de Evaluaciones de dos Grupos de Estudiantes

Fuente: Elaboración propia.
En la Tabla se muestra además el índice de mejora obtenido en cada área, por el grupo de estudiantes que utilizaron el Robot Darwin Mini, donde se puede apreciar cómo en el peor de los casos se tuvo una mejora de 10.6 puntos para el área de Robótica Básica y hasta 23.2 puntos para el área de Programación Avanzada.
Comentarios Finales
En los resultados se aprecia claramente que cuando se utilizó el Robot Darwin Mini propuesto como herramienta de aprendizaje en todas las áreas evaluadas, se mejoró el aprendizaje de los estudiantes, pero además se logró fomentar el aprendizaje colaborativo y trabajo en equipo, y también se pudieron desarrollar otras competencias al realizar su aprendizaje en grupo, debido a la interacción que deben de realizar entre ellos y con el robot, para lograr realizar las prácticas de forma adecuada.
Resumen de resultados
En este trabajo se analizaron primero los diferentes roles que pueden jugar los robots en el campo de la educación, con la finalidad de poder determinar qué tipo de robot de los que se pueden encontrar en el mercado, cubre mejor las características necesarias para fomentar el Desarrollo de Competencias en nuestros estudiantes. Los resultados obtenidos son bastante alentadores, y se puede esperar que al ampliar la implementación a grupos más numerosos, se puedan obtener también mejor desempeño en la evaluación de las diferentes habilidades que buscamos desarrollar en nuestros estudiantes.
Conclusiones
Los resultados obtenidos demuestran la efectividad del uso del Robot Darwin Mini para implementar estrategias de desarrollo de competencias, por lo que se justifica su elección para utilizarlo. Se demuestra así que el análisis previo que se realizó de los diferentes roles que juegan los Robots en la Educación fue acertado. La evaluación de los estudiantes mejoró hasta en 21.2 puntos en promedio en los tópicos avanzados de los temas (Robótica y Programación), y en 16.9 puntos para las áreas de Matemáticas, que son los que suelen ser más complicados de aprender para los estudiantes. Se espera por lo tanto que se pueda mejorar el aprendizaje de los estudiantes de licenciatura implementando esta herramienta en algunas unidades de aprendizaje de los programas educativos.
Recomendaciones
Los investigadores interesados en continuar nuestra investigación podrían adoptar la implementación del Robot Darwin Mini, ya que además de todos los beneficios que ya comentamos es un robot de un precio accesible en comparación con otros que podemos encontrar en el mercado (como por ejemplo el Robot NAO de Robotis) y consideramos las funcionalidades y ventajas que nos brinda para su utilización en la implementación de estrategias de aprendizaje colaborativo. La finalidad no es hacerle publicidad a este robot, sino que nuestra recomendación está fundamentada en los resultados de esta investigación.