











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
La inexperiencia de los médicos en las salas de urgencias incrementa la mortalidad de pacientes graves. El Instituto Nacional de Medicina, estima que en los hospitales de la unión americana ocurren 98 000 muertes anuales por errores médicos1. El alto nivel de estrés e incertidumbre característico en las salas de urgencias influye en la resolución de casos clínicos graves exponiendo a los pacientes a un alto nivel de error.
En los últimos 20 años se ha promovido la enseñanza de habilidades clínicas a través de ambientes controlados en centros de simulación clínica y así disminuir la exposición de los pacientes a personal médico en formación con un bajo nivel de habilidad y competencia clínica. Al exponer a los estudiantes a casos simulados se espera que estos obtengan respuestas deseables y que se alcancen objetivos de aprendizaje durante el ejercicio2-3.
En el ambiente de enseñanza médica, Smith4 demostró que una clase de anatomía podía ser supervisada mediante un sistema de videoconferencia, logrando que los estudiantes olvidaran el hecho de que un cirujano no estaba a cargo de manera presencial. Sin embargo, Campos A5 no encontró hallazgos significativos en el entrenamiento con simulación mejorado con tecnología, haciendo mención de que podrían deberse al azar.
Actualmente se cuenta con un aceptable acceso a telemedicina y telepresencia robótica, adaptables a las características económico sociales de cada contexto local o regional 6-9. Sus servicios y beneficios pueden incidir en todas las actividades relacionadas con la atención médica, la salud pública, enseñanza y la administración de servicios de salud10. En este contexto Oeveren y colaboradores demostraron que la tasa de éxito de intubaciones endotraqueales mejoró de 71 % a 96% mediante la asesoría a través de telepresencia robótica11. Además, la actual crísis mundial ocasionada por la COVID-19, ha limitado de manera importante el acceso a los estudiantes de medicina a las àreas de urgencias, lo que ha reducido su participación en áreas clínicas, con la consecuente pérdida de objetivos de aprendisaje. El adevenimiento de laboratorios de habilidades clínicas simuladas en las escuelas y facultades de medicina, es posible cumplir con un permite dar continuidad al programa académico de urgencias a través de someter al estudiante a casos clínicos de urgencias médicas simuladas, en un contexto de aprendisaje basado en problemas con acciones deseadas y objetivos de aprendisaje rastreables, incluso combinando la telepresencia robótica con la simulación clínica, se pueden establecer un sistema de enseñanza en donde la transmisión de conocimiento se de en tiempos reales bajo condiciones simuladas y controladas de modelos clínicos entre dos grupos de médicos uno con experiencia que transmite el conocimiento en tiempo real a uno con menos experiencia 12.
OBJETIVO
El objetivo del estudio fue determinar las diferencias en las acciones deseadas y objetivos alcanzados durante el ejercicio de simulación de emergencias médicas simuladas atendidas por estudiantes del último año de medicina cuando son o no asistidos por telepresencia robótica.
MÉTODO
Tipo de estudio: estudio cuasi experimental, comparativo de un modelo educativo por competencias en ambientes de simulación clínica.
La población de estudio fueron alumnos de la carrera de médico cirujano de quinto año y próximos a ingresar al internado de pregrado.
La selección de estudiantes fue mediante invitación a través de una convocatoria abierta, dirigida a los alumnos de quinto año de la carrera de médico cirujano que se interesaran en participar en el proyecto de investigación. Se publicó la información en redes sociales: Facebook, así como en el Laboratorio de Habilidades Clínicas. Se documentó en una lista la participación de los alumnos convocados obteniendo sus datos personales básicos.
Los alumnos participantes recibieron una capacitación de dos horas sobre las técnicas de simulación médica y los recursos básicos con los que se apoyarían para resolver el caso clínico simulado.
Los criterios de inclusión para la selección de alumnos fueron: estudiantes de quinto año de la licenciatura de la carrera de médico cirujano de la facultad de medicina que hayan acudido a la plática introductoria del proyecto y simulación médica.
El estudio se llevó a cabo en el Laboratorio de Habilidades Clínicas de la facultad de medicina, el cual cuenta con áreas de pediatría, ginecología y obstetricia, área de urgencias, área de hospitalización 1 y 2, sala de procedimientos, área de discusión de casos clínicos y cubículos de auscultación. Todos los casos fueron dispuestos en el cubículo denominado “hospital 1”, el cual cuenta con una cabina de vigilancia discreta situada a un costado del simulador y desde donde se encuentra la consola de mando del modelo simulado. La particularidad del cubículo es que el investigador puede observar a los alumnos participantes sin que éstos puedan ver al investigador. Además, el cubículo denominado “hospital 1”, cuenta con una cámara que permite grabar audio y video sobre competencias de los alumnos durante la resolución del caso clínico.
El cubículo cuenta con un monitor de signos vitales METI modelo SL5001, carro rojo equipado de acuerdo a la Norma Oficial Mexicana NOM - 013, cama de hospitalización, gabinete de cabecera para hospital, un simulador de fuente de oxígeno y de aspiración, un porta suero con base cromada, negatoscopio de una pantalla, carro de curaciones, mesa puente y un paciente tipo simulador humano médico de IV generación METI: iStan 100. Además se contó con la opinión técnica del coordinador del laboratorio de habilidades clínicas para su correcta aplicación.
Con base en el programa de internado de pregrado para la rotación de urgencias, se prepararon nueve casos clínicos simulados sobre las principales urgencias médicas. En cada caso se evaluó el conocimiento médico y las competencias necesarias con las que debe contar el médico interno para resolver el caso, de acuerdo a las acciones deseadas expresas en las listas de cotejo previamente recomendadas por IStan.
Durante la simulación los estudiantes contaron con el apoyo de un enfermero quien los asistiría para seguir las indicaciones proporcionadas por los estudiantes. El enfermero no intervino en la resolución del caso, a menos que su ayuda fuera expresamente solicitada por los estudiantes.
Asistencia a través de la telepresencia robótica
Se contó con un centro de telediagnóstico localizado a 800 metros de distancia del laboratorio de habilidades clínicas. En este centro participó un médico especialista de urgencias médicas que asistió a los estudiantes en el caso apoyado por telepresencia robótica mediante orientación médica respecto al tratamiento del caso clínico correspondiente. El médico urgenciólogo no tuvo conocimiento previo de los casos que asistió ni de la lista de cotejo de acciones deseadas de tal manera que se evaluó en conjunto la participación del médico y los estudiantes.
Telepresencia robótica
La red de telecomunicaciones consistió en una red inalámbrica Wifi 2, velocidad: 20,0 Mbps.
El equipo de videoconferencia consistió en cámara modelo swan de tipo videovigilancia, computadora portátil.
La telepresencia robótica consistió en un software Double [app version 2.0.5 (230)], robot Double, Ipad air primera generación, Ipad mini segunda generación. Mac Book Pro con pantalla retina de 13 pulgadas, Late 2013.
Los casos clínicos fueron seleccionados de acuerdo a Gordon, James. Medical Education Technologies (CD-ROM)13
Fase experimental
Se llevó a cabo en el laboratorio de habilidades clínicas de la facultad de medicina. Se dividió el grupo en 2 subgrupos, y a su vez, en parejas para la resolución del caso clínico que fue presentado, de acuerdo al orden de confirmación de participación. Mediante tabla de números aleatorios se eligió el caso clínico y dos estudiantes por caso para la resolución del mismo. En ninguno de los casos, los alumnos tuvieron conocimiento previo de los casos que se les iban a asignar.
Para la resolución de los casos clínicos, cada pareja resolvió un caso clínico sin uso de telepresencia robótica. Posteriormente, cada pareja resolvió un caso clínico distinto al resuelto, de manera previa haciendo uso de telepresencia robótica. El uso de telepresencia robótica se realizó a través de videollamada vía Skype, fue utilizado el robot Double para interconsultar al médico urgenciólogo, presentándole el caso clínico y mediante acción conjunta se realizó la resolución del mismo. La llamada al médico urgenciólogo se realizó en el tiempo que cada estudiante de acuerdo a su desempeño y conocimiento de la situación clínica consideró necesario. La duración del caso fue según lo estipulado en los casos clínicos predeterminados.
Evaluación del desempeño de los estudiantes
Los evaluadores se situaron en la sala anexa llamada “hospitalización 2”, quienes condujeron el caso clínico predeterminado observando el cumplimiento de las acciones deseadas y los objetivos de aprendizaje. Durante la resolución de cada caso, se realizó la evaluación del mismo mediante la lista de cotejo del escenario del caso clínico asignado en la cual se calificó cada caso clínico de manera individual con base al porcentaje de acciones deseadas realizadas por cada grupo de alumnos y el porcentaje de objetivos de aprendizaje alcanzados durante la resolución del caso clínico. Todos los casos fueron video grabados. Al término de cada caso los alumnos recibieron una retroalimentación.
Finalmente, después de haber resuelto los casos clínicos asignados, los participantes contestaron la encuesta de satisfacción del usuario en la que se evaluó la opinión por parte del estudiante de medicina de quinto año al utilizar o no a herramienta de Telepresencia Robótica, la red de telepresencia y el uso de la telemedicina como herramienta para la resolución de casos clínicos.
Análisis estadístico
Se realizó un análisis estadístico descriptivo con medidas de tendencia central y dispersión. De acuerdo a la distribución en la curva de normalidad se llevó a cabo estadística comparativa entre los dos grupos (control y experimental) con diferencia de medias para muestras pareadas de dos grupos.
Consideraciones éticas
La participación de los alumnos en la investigación fue voluntaria, se les informó ampliamente del objetivo de la misma y se les proporcionó la carta de consentimiento informado la cual firmaron previo a los ejercicios simulados. Además, se aplicaron las consideraciones éticas según la declaración de Helsinki y La Ley General de Salud en Materia de Investigación para la Salud; Título Primero, artículo 3º inciso V y procurando el criterio de respeto a su dignidad y la protección de sus derechos y bienestar según el título segundo, articulo 13 y 14 inciso I, II, V, VI.
RESULTADOS
Se contactaron 40 alumnos como resultado de la convocatoria, de los cuales, 28 asistieron a la plática introductoria y un total de 14 alumnos fueron los participantes.
Las características de los grupos estudiados se muestran en la Tabla 1.
Tabla 1 Características de los grupos estudiados
| Nombre | Sexo | Semestre | Caso clínico | Uso de Telerobótica | Tiempo de resolución |
| Pareja 1 | M | 9° | Caso 1: Anafilaxia | No | 16 m 11 s |
| M | 9° | Caso 2: Neumonía con choque séptico | Si | 33 m 49 s | |
| Pareja 2 | M | 9° | Caso 3: Asma con neumotórax | Si | 34 m 5 s |
| M | 9° | Caso 4: Angina de pecho con paro cardíaco | No | 15 m 8 s | |
| Pareja 3 | F | 9° | Caso 5: Asma grave en paciente joven | No | 14 m 12 s |
| M | 9° | Caso 6: Infarto anterior | Si | 19 m 6 s | |
| Pareja 4 | M | 9° | Caso 7: Exposición a organofosforados | No | 20 m 23 s |
| M | 9° | Caso 8: Asma grave en paciente joven | Si | 19 m | |
| Pareja 5 | M | 9° | Caso 9: Anafilaxia | Si | 16 m 11 s |
| M | 9° | Caso 10: Neumonía con choque séptico | No | 19 m 22 s | |
| Pareja 6 | F | 11° | Caso 11: Angina de pecho con paro cardíaco | Si | 22 m 10 s |
| F | 11° | Caso 12: Asma con neumotórax | No | 18 m 5 s | |
| Estudiante 13 | F | 9° | Caso 13: Exacerbación de EPOC con falla respiratoria | No | 19 m |
| Caso 14: Exposición a organofosforados | Si | 17 m 48 s | |||
| Estudiante 14 | F | 9° | Caso 15: Falla cardíaca con edema | Si | 23 m 47 s |
| Caso 16: Infarto anterior | No | 13 m |
La Figura 1 muestra el porcentaje de acciones deseadas sin el uso de Telepresencia Robótica versus el uso de Telepresencia Robótica en donde se observa un incremento significativo posterior al uso de la telepresencia robótica.
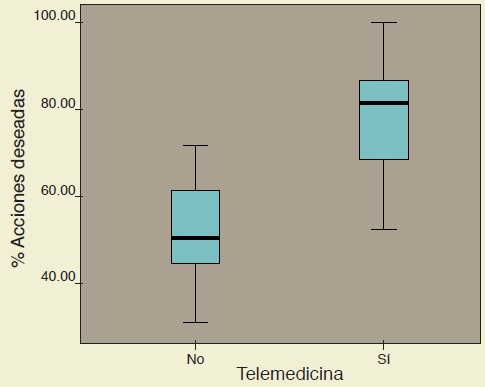
Valor de P significativo <0.05 con prueba U de Mann - Whitney
Figura 1 Porcentaje de acciones deseadas sin el uso de telepresencia robótica versus con el uso de telepresencia robótica
La Figura 2 muestra el porcentaje de objetivos de aprendizaje realizados sin el uso de Telepresencia Robótica versus el uso de Telepresencia Robótica. Se observó un incremento en los objetivos de aprendizaje con la asistencia de Telepresencia Robótica.

Valor de P significativo <0.05 con prueba U de Mann - Whitney
Figura 2 Porcentaje de objetivos de aprendizaje sin el uso de telepresencia robótica versus el uso de telepresencia robótica
El resultado de la encuesta de satisfacción muestra que los estudiantes se sintieron apoyados por la herramienta de Telepresencia Robótica en un 92.8%, resaltando que ninguno refirió una opinión negativa o contraria a la herramienta. Tabla 2.
Tabla 2 Resultados de la encuesta de satisfacción contestada por los estudiantes posterior a la resolución de los casos clínicos simulados
| Totalmente en desacuerdo | En desacuerdo | Neutral (indiferente) | De acuerdo | Totalmente de acuerdo | |
| 1. La resolución de Casos Clínicos es más fácil con orientación a distancia con Telemedicina. | 14.3 % | 28.6% | 57.1 % | ||
| 2. Me sentí apoyado con la Orientación recibida por medio de la Telemedicina. | 7.1 % | 35.7 % | 57.1 % | ||
| 3. Siento que el uso de la Telemedicina disminuye mi desempeño como médico en la resolución de casos clínicos. | 14.3 % | 71.4 % | 7.1 % | 7.1 % | |
| 4. La comunicación por medio del monitor como herramienta de orientación en la resolución de casos clínicos es fácil. | 14.3 % | 28.6 % | 42.9 % | 14.3 % | |
| 5. Apoyo el Uso de la Telemedicina como herramienta de diagnóstico. | 7.1 % | 14.3 % | 50.0 % | 28.6 % | |
| 6. Siento que la orientación por Telemedicina hace más difícil la resolución del caso clínico. | 35.7 % | 28.6 % | 21.4 % | 14.3 % | |
| 7. Me gustó más enfrentarme al caso clínico sin ayuda de la orientación por medio de la Telemedicina. | 21.4 % | 14.3 % | 57.1 % | 7.1 % | |
| 8. Creo que la Telemedicina no es una herramienta de diagnóstico y tratamiento del paciente. | 21.4 % | 64.3 % | 14.3 % | ||
| 9. Considero que el uso de la Telemedicina es una Herramienta útil para el diagnóstico y tratamiento médico. | 64.3 % | 35.7 % | |||
| 10. Me preocupa que se comprometa la relación médico/paciente. | 35.7 % | 35.7 % | 28.6 % |
DISCUSIÓN
El presente estudio demuestra que existe un incremento significativo en las acciones deseadas y objetivos de aprendizaje para la resolución de casos clínicos simulados al utilizar Telepresencia Robótica con un alto nivel de satisfacción por parte de los médicos con menor experiencia.
El incremento de acciones deseadas durante la resolución de casos clínicos simulados mediante el uso de telerobótica fue significativo en nuestro estudio. En este ámbito una comunidad de hospitales en Indiana14 ha implementado un equipo de respuesta rápida en conjunto con el Institute of Healthcare Improvement donde los médicos intensivistas dieron ordenes de cuidados inmediatos en 70% de los casos, logrando una disminución del promedio de ataques cardiacos fuera de la unidad de cuidados intensivos de 6 a 1 en un mes, concluyendo que los beneficios de la telepresencia remota son: establecer en el sitio clínico un consenso con los estándares de atención del Instituto de Mejora de los Cuidados de la Salud (del Inglés: Institute of Healthcare Improvement), reducción significativa de los ataques cardiacos fuera de la unidad de cuidados intensivos, presencia rápida del médico para la atención del paciente, cuidados al paciente en menor tiempo, mejor relación de comunicación entre los médicos y asistentes.
El uso de telerobótica en el presente estudio evidenció el incremento en el cumplimiento de objetivos de aprendizaje por parte de los estudiantes de medicina. Estos datos coinciden con lo presentado en el departamento de Neurocirugía de la UCLA15, quien utilizó un robot para la vigilancia de los pacientes en la sala de terapia intensiva, argumentando que uno de los beneficios era la mejora en la educación y supervisión de los residentes médicos, concluyendo que las decisiones de tratamiento se realizan en un tiempo menor, incremento en las adecuadas prácticas en la UCI, mejora en la satisfacción del personal de enfermería y familiares del paciente.
Es importante mencionar que al realizar actividades de simulación médica y uso de telerobótica, habilidades como la comunicación interprofesional, entre médicos de menor experiencia y médicos especialistas se ven beneficiadas. Schrant y colaboradores16 mencionan utilizar su departamento de simulación médica no sólo para mejorar habilidades de diagnóstico y tratamiento sino para mejorar las habilidades de comunicación interprofesional y fomentar un foro de educación interprofesional, concluyendo que el involucrar estudiantes de otras disciplinas afines mejora la educación, esto con base a que al interactuar con el equipo de atención médica mejora la experiencia de aprendizaje de los estudiantes.
Debido a la pandemia por COVID la Asociación de colegios americanos de medicina implementó sesiones de telesimulación pediátricas para los estudiantes de medicina, mismos que refirieron altos niveles de satisfacción refiriendo la actividad como una efectiva estrategia educativa altamente recomendada. 17
Su D y colaboradores18 en un estudio de tipo meta-análisis en pacientes diabéticos estudiaron el uso de la telemedicina versus cuidados convencionales, encontrando que con el uso de telemedicina se obtuvieron mejores controles glucémicos en pacientes con diabetes mellitus, especialmente aquellos diagnosticados con diabetes tipo 2.
Di Lamb19 en su estudio practicado con The Royal Air Force Critical Care Air Support Teams (CCASTs) demostró que el uso de pacientes simulados puede tener ventaja sobre los métodos tradicionales de enseñanza debido a la recreación real de eventos críticos y resultar tan efectivo como los métodos utilizados en el modelo educativo tradicional, con una consecuente mejora en el cuidado del paciente, concluyendo que la autopercepción de la competencia y la autosuficiencia de los proveedores de salud mejoró utilizando simulación de alta calidad.
En cuanto a la satisfacción del usuario en nuestro estudio los participantes manifestaron un alto índice de apoyo en la resolución de casos clínicos simulados haciendo uso de Telepresencia Robótica. Lars20 en su estudio de vigilancia postoperatoria para pacientes con antecedente de cirugía urológica demostró que la satisfacción de los usuarios fue equivalente entre los grupos que fueron vigilados por el robot y el grupo vigilado por personal médico quien concluyo que la vigilancia realizada por el robot no repercute en la tasa de complicaciones post operatorias.
Nuestro estudio tuvo como limitaciones importantes haber utilizado una red comercial de internet lo que en ocasiones limitó la calidad del audio y video en la telepresencia robótica. El tamaño de la muestra fue de 13 de estudiantes trabajando en 6 pares y 14 casos, esto puede ser una limitante para las conclusiones de nuestro estudio, se observó que debido a las actividades académicas e intereses de los estudiantes no se obtuvo una muestra mayor pero se resolvió mediante la variabilidad de tipos de casos clínicos.
CONCLUSIÓN
Nuestro estudio demostró que el uso de la Telepresencia Robótica con el apoyo de un médico experimentado mejora las acciones deseadas y objetivos de aprendizaje en los estudiantes de medicina de pregrado para la resolución de casos clínicos de urgencias médicas en ambientes simulados con un alto nivel de satisfacción.
CONTRIBUCIÓN INDIVIDUAL
• GAE: Idea del estudio, desarrollo del protocolo, desarrollo de la investigación, captura de datos, proceso estadístico, elaboración del manuscrito.
• VAGF: Idea del estudio, desarrollo del protocolo, desarrollo de la investigación, captura de datos, proceso estadístico, elaboración del manuscrito.
• RJR: Idea, desarrollo del protocolo, desarrollo de la investigación, captura de datos.
• PSEO: Idea, desarrollo del protocolo, logística de la investigación, desarrollo de la investigación, elaboración del manuscrito.
• DAMG: Idea, desarrollo del protocolo, desarrollo de la investigación, captura de datos, proceso estadístico, elaboración del manuscrito.
• LNMR: Desarrollo de la investigación, proceso estadístico, elaboración del manuscrito.
• AIPC: Desarrollo de la investigación, proceso estadístico, elaboración del manuscrito.
PRESENTACIONES PREVIAS
Trabajo de tesis (Elizabeth Gutiérrez Avilés y Ricardo Rogel Jaimes).
FINANCIAMIENTO
El presente trabajo no requirió de financiamiento externo.
CONFLICTO DE INTERESES
Ninguno de los autores tiene conflicto de interés que declarar con respecto al desarrollo y resultados del presente manuscrito.

