










Servicios Personalizados
Revista
Articulo
 texto en
texto en  Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista Chapingo serie ciencias forestales y del ambiente
versión On-line ISSN 2007-4018versión impresa ISSN 2007-3828
Rev. Chapingo ser. cienc. for. ambient vol.24 no.2 Chapingo may./ago. 2018
https://doi.org/10.5154/r.rchscfa.2017.09.059
Artículo científico
Precisión de los sensores remotos para la estimación de parámetros de biomasa aérea: LIDAR portátil y sensores ópticos
1Tecnológico de Monterrey, Laboratorio de Sistemas de Información Georreferenciada. Av. Eugenio Garza Sada núm. 2501 Sur, col. Tecnológico. C. P. 64849. Monterrey, Nuevo León, México.
2Universidad Autónoma de Nuevo León, Facultad de Ingeniería Civil. Av. Pedro de Alba s/n, Cd. Universitaria. C. P. 66451. San Nicolás de los Garza, Nuevo León, México.
Introducción:
La estimación de biomasa aérea mediante el método tradicional forestal es laboriosa, costosa y demanda tiempo. Una alternativa para resolver esta problemática es el uso de la teledetección.
Objetivo:
Evaluar la precisión de la tecnología LIDAR portátil y la fotogrametría (fotorreconstrucción) en la generación de nubes de puntos para la estimación de biomasa aérea.
Materiales y métodos:
Se analizaron 26 árboles del género Quercus L. de un bosque urbano en el sur de Monterrey, México. El diámetro a la altura del pecho (DAP), altura total y diámetro de copa se obtuvieron con seis métodos: 1) tradicional forestal, 2) LIDAR portátil a nivel de suelo, 3) fotorreconstrucción (FR) de color normal a nivel de suelo, 4) FR de color infrarrojo a nivel de suelo, 5) FR de fotografía aérea de color normal y 6) FR de fotografía aérea de color infrarrojo. La biomasa aérea se calculó y la precisión de cada método se evaluó tomando como referencia el tradicional forestal.
Resultados y discusión:
LIDAR portátil ofrece información más precisa para estimar la biomasa aérea (R2 = 0.945), seguido por la FR de color normal a nivel de suelo (R2 = 0.824), cuando se comparan con la obtenida por el método tradicional forestal. La FR de fotografía aérea de color normal mostró los resultados más pobres (R2 = 0.653), debido a la imposibilidad de medir el DAP. La toma de datos con los sensores fue más rápida (>80 %) con respecto al MTF.
Conclusión:
Las técnicas de teledetección tienen potencial para la obtención de parámetros forestales en proyectos de gran escala.
Palabras clave: biomasa aérea; Quercus; fotorreconstrucción; vehículo aéreo no tripulado; teledetección
Introduction:
Aerial biomass estimation using the traditional forestry method is laborious, expensive and time consuming. An alternative to solve this problem is the use of remote sensing.
Objective:
To evaluate the precision of portable LIDAR technology and photogrammetry (photo-reconstruction) in the generation of point clouds to estimate aerial biomass.
Materials and methods:
A total of 26 Quercus L. trees were analyzed from an urban forest in the south of Monterrey, Mexico. Diameter at breast height (DBH), total height and crown diameter were obtained with six methods: 1) traditional forest, 2) portable LIDAR at ground level, 3) normal color photo-reconstruction (PR) at ground level, 4) infrared color PR at ground level, 5) PR of normal color aerial image and 6) PR of infrared aerial image. Aerial biomass was estimated and the precision of each method was evaluated taking as reference the traditional forest method.
Results and discussion:
Portable LIDAR offers more accurate information to estimate the aerial biomass (R2 = 0.945), followed by normal color PR at ground level (R2 = 0.824), when compared with that obtained by the traditional forest method. PR of normal color aerial images showed the poorest results (R2 = 0.653), due to the impossibility to measure the DBH. Data collection with sensors was faster (>80 %) with respect to the TFM.
Conclusion:
Remote sensing techniques have the potential to obtain forest parameters in large-scale projects.
Keywords: aerial biomass; Quercus; photo-reconstruction; unmanned aerial vehicle; remote sensing
Introducción
Los inventarios forestales son una de las herramientas capaces de evaluar la condición de los ecosistemas forestales y de ayudar a la toma de decisiones respecto a las acciones o políticas para la adaptación o mitigación de los efectos del cambio climático.
El levantamiento de datos cualitativos y cuantitativos provee insumos para la estimación de biomasa aérea y carbono almacenado. En este sentido, los parámetros de estimación de biomasa se han obtenido tradicionalmente colectando datos in situ mediante la medición manual de características distintivas de la fisionomía de los árboles, tales como el diámetro a la altura del pecho, la altura total y el diámetro de la copa.
Con el avance de la tecnología y los nuevos conocimientos en áreas como la percepción remota y los sistemas de información geográfica, se ha tratado de complementar la obtención de los parámetros mediante técnicas de captura de datos digitales para facilitar la toma y el manejo de la información (Calders et al., 2014; Liang et al., 2014a; Yépez & Lozano, 2014).
El objetivo de esta contribución fue evaluar la precisión de la tecnología LIDAR portátil y la fotogrametría (fotorreconstrucción) en la generación de nubes de puntos, para la estimación de biomasa aérea contenida en un bosque urbano. El trabajo se realizó bajo el supuesto de que estas técnicas son útiles para extraer parámetros forestales de manera eficiente y precisa, con valores similares a los obtenidos con el método tradicional forestal.
Materiales y métodos
Área de estudio y colecta de datos en campo
El experimento se realizó en el bosque urbano del Instituto Tecnológico y de Estudios Superiores de Monterrey, Nuevo León, México. El bosque está conformado principalmente por árboles de fresno (Fraxinus americana L.) y encino siempre verde (Quercus fusiformis Small). El polígono comprende un área de 3 500 m2 (Figura 1), la cual se seleccionó con base en la concentración de árboles del género Quercus con diámetro a la altura del pecho mayor de 7 cm y tratando de evitar el “ruido” generado por personas o vehículos en las nubes de puntos.

Figura 1 Área de estudio (3 500 m2) en el bosque urbano del Instituto Tecnológico y de Estudios Superiores de Monterrey (Nuevo León, México) y especies presentes del género Quercus, para la evaluación de sensores remotos en la estimación de parámetros de biomasa aérea.
Obtención de datos con el método tradicional forestal
Los parámetros altura total (AT), diámetro de la copa (DC) y diámetro a la altura del pecho (DAP) de cada individuo se obtuvieron utilizando telémetro láser (LaserAce modelo 3D), cinta métrica y cinta diamétrica, respectivamente. Las mediciones norte-sur y este-oeste del DC se promediaron y el DAP se midió a una altura de 1.3 m.
Obtención de datos con LIDAR portátil
Se utilizó un equipo LIDAR portátil (GeoSlam modelo Zeb-1) que cuenta con un rango máximo de 30 m y precisión de ±0.1 % con una tasa de escaneo de 43 200 puntos·s-1. LIDAR es un sensor que emite un rayo láser hacia un objetivo y mide el tiempo de retorno para estimar la distancia entre el instrumento y el objeto; si la posición del instrumento se conoce con precisión, es posible construir una nube de puntos que represente el objeto iluminado en tres dimensiones (Dassot, Constant, & Fournier, 2011). Bosse, Zlot, y Flick (2012) presentan detalle del diseño y funcionamiento del sensor. El levantamiento consistió en seis transectos con distancia total de 910 m (Figura 2). En la trayectoria se esquivó la infraestructura existente en la zona.

Obtención de datos con técnica fotogramétrica
Se capturaron fotografías de suelo y aéreas en color normal (RGB) y color infrarrojo (IR) con traslape de 70 %. Para el nivel de suelo se utilizaron dos sensores ópticos: 1) una cámara digital de 18.1 megapíxeles con ajuste de distancia focal (FOV) de 73.7, sensor CMOS y lente de cristal NIKKOR, y 2) una cámara de acción de 12 megapíxeles, FOV de 94.4, sensor CMOS con la adaptación de un lente de 5 megapíxeles que permite que el sensor de la cámara de acción detecte la energía electromagnética del infrarrojo cercano. La transmitancia del lente se encuentra en los rangos de 400 a 560 nm y 688 a 740 nm. En total se obtuvieron 577 fotografías RGB y 526 en IR. Los recorridos para la captura de las fotografías se hicieron en dos fases mostradas en las Figuras 3a y 3b para RGB, y Figuras 3c y 3d para IR. Para las fotos aéreas se acopló la cámara de acción a un vehículo aéreo no tripulado (VANT) con un sistema de estabilización para asegurar la obtención de fotografías verticales. Se programaron dos vuelos; uno con lente RGB y otro con lente IR. Previo al vuelo se diseñó el plan (Figura 3e) considerando un periodo de 1 s entre cada fotografía (traslape de 70 %) y altura de vuelo de 40 m con respecto al suelo. Se tomaron 861 fotografías aéreas en RGB y 490 en IR.

Figura 3 Recorridos en el bosque urbano del Instituto Tecnológico y de Estudios Superiores de Monterrey (Nuevo León, México), para la obtención de parámetros de biomasa aérea con la técnica fotogramétrica: fotorreconstrucción (FR) de color normal a nivel de suelo (a y b), FR de color infrarrojo a nivel de suelo (c y d) y FR de fotografía aérea de color normal e infrarrojo (e).
Generación y postproceso de nubes de puntos
El proceso se realizó en equipos de 8 Gb RAM, procesador Intel Core i7, Windows 7, tarjeta de video Nvidia GeForce 9600, usando el programa de fotorreconstrucción Agisoft PhotoScanMR. Esta aplicación permite generar objetos de tres dimensiones, a partir de fotografías con puntos distintos de orientación (Li, Chen, Zhang, & Jia, 2016). Se utilizó la técnica structure-from-motion (SFM) con una precisión alta de alineamiento y calidad media de detalle de geometría. Los grupos de fotografías se alinearon por puntos en común, determinando la posición de las cámaras en cada fotografía, con lo cual se generó una nube de puntos densa para cada sensor y tipo datos.
La georreferenciación se hizo con un receptor GPS diferencial (Ashtech, modelo ProMark500), con el cual se obtuvieron cuatro puntos geodésicos. Estos fueron corregidos con la estación local Mty2 de la Red Geodésica Nacional Activa (RGNA). A partir de estos datos se realizó el registro de la nube de puntos del LIDAR portátil y se usó como referencia en el alineamiento de las nubes fotorreconstruídas.
Los puntos aislados de la nube principal se eliminaron de forma semiautomática para las técnicas escaneo y fotorreconstrución (FR). La nube se segmentó en dos clases (árboles y suelo) detectando las características geométricas como la forma linear (1D), plana (2D) o tridimensional (3D) a través de 10 escalas, desde 5 cm hasta 50 cm de diámetro. De esta forma, los puntos se discriminaron mediante la comparación de todas las escalas, generando una clasificación dicotómica (Brodu & Langue, 2012).
Parámetros forestales
Una vez que las nubes de puntos se segmentaron en las dos clases de interés (árboles y suelo), los puntos correspondientes a la categoría “árboles” se aislaron para proceder con la generación de los parámetros forestales requeridos para la comparación de los procedimientos (Trochta, Krůček, Vrška, & Král, 2017).
Al extraer los puntos correspondientes a los árboles se generó un vacío de información, por lo que se utilizó el algoritmo de interpolación Inversed Distance Weighted (IDW) que usa la posición de los puntos existentes alrededor de los vacíos para predecir la posición de nuevos puntos. El IDW supone que las posiciones de los puntos existentes tendrán más influencia sobre un nuevo punto predicho y que esta disminuirá conforme los puntos se alejen.
Determinación de las coordenadas centrales de los árboles
Para la asignación de los puntos centrales de las bases de los árboles se determinaron primero sus posiciones en los ejes XY, empleando la mediana de las coordenadas de todos los puntos presentes en un corte transversal a 60 cm sobre el nivel del suelo. El eje Z se asignó en la coordenada determinada por la mediana de los cinco puntos más cercanos a la nube de puntos correspondiente al terreno.
Obtención de altura total, diámetro de la copa y diámetro a la altura del pecho
La altura total (AT) se determinó de manera automática con cada nube de puntos, a partir de la distancia vertical entre el punto más bajo y la parte más alta del árbol. Por otra parte, utilizando una proyección convexa plana, el área que envolvía la copa de los árboles desde una proyección ortogonal se calculó a través del algoritmo de envoltura convexa (Trochta et al., 2017). Posteriormente, el diámetro de la copa (DC) se calculó utilizando el área convexa (A) en la siguiente ecuación:
El cálculo automático del DAP se hizo mediante submuestras de puntos de los árboles ubicados entre las alturas de 1.25 m y 1.35 m sobre la base. La transformación aleatoria de Hough (Chen & Chung, 2001) se utilizó para buscar el centro de cada punto que compone la submuestra, donde el centro del círculo más frecuente es seleccionado mediante interacciones como el centro resultante (Xu & Oja, 1993). En las nubes de puntos de FR desde un VANT, debido a la ausencia de información del DAP (el dosel del árbol obstruía la visión del tronco) se procedió a realizar una estimación indirecta a partir de los parámetros fotogramétricos de AT y DC. Para esta operación se aplicó la ecuación de encino sésil (Quercus petraea L.), desarrollada por Balenović, Seletković, Pernar, Ostrogović, y Jazbec (2012):
Biomasa aérea
Las ecuaciones alométricas del género Quercus, investigadas en la literatura, se muestran en el Cuadro 1. Las bases de datos consultadas correspondieron al sistema de medición, reporte y verificación (MRV) de la Comisión Nacional Forestal (CONAFOR), así como a la base del Programa Mexicano del Carbono (Rojas-García, De Jong, Martínez-Zurimendí, & Paz-Pellat, 2015). Se consideraron las ecuaciones que correspondieran a las especies de la región tales como bosques de encino, encino-pino y pino-encino, y que contaran con un valor alto de R2 (>0.85). Después, la biomasa aérea se estimó con los valores obtenidos automáticamente mediante el DAP generado por el uso de tecnología LIDAR, FR al nivel del suelo y aéreo (VANT). Se detectaron los casos en que la diferencia entre el método tradicional forestal (MTF) y los métodos evaluados fuera mayor de 25 %, y se realizaron mediciones manuales para reducir errores ocasionados por ruido. La relación existente entre las mediciones adquiridas a través de los distintos métodos, con respecto al levantamiento de datos mediante el MTF in situ (P = 0.05), se obtuvo a través de modelos de regresión.
Cuadro 1 Ecuaciones alométricas para el cálculo de biomasa aérea de Quercus en el norte de México.
| Especie | Ecuación | Autor |
|---|---|---|
| Quercus polymorpha | 0.092(DBH2.448)] / [0.092(DAP2.448)] | Rojas-García et al. (2015) |
| Quercus spp. | [0.089(DBH2.5226)] / [0.089(DAP2.5226)] | Návar (2009) |
| Quercus spp. | [e-2.874(DBH2.631)] / [e-2.874 (DAP2.631)] | Návar-Cháidez (2010) |
| Quercus spp. | [e-2.754(DBH2.574)] / [e-2.754 (DAP2.574)] | Návar-Cháidez (2010) |
| Quercus spp. | [0.010702(DBH3.05082)] / [0.010702(DAP3.05082)] | Rodríguez, Jiménez, Aguirre, Treviño, y Razo (2009) |
| Quercus spp. | [0.038424(DBH2.82139)] / [0.038424(DAP2.82139)] | Rodríguez et al. (2009) |
| Quercus spp. | [0.45534(DBH2)] / [0.45534(DAP2)] | Aguirre y Jiménez (2011) |
| Quercus spp. | [0.0202(DBH2.6480)] / [0.0202(DAP2. 6480)] | Návar (2009) |
| Quercus spp. | [0.0768(DBH2.4416)] / [0.0768(DAP2.4416)] | Návar (2009) |
Resultados y discusión
Se muestrearon 26 árboles del género Quercus. La especie dominante fue Q. fusiformis con 15 individuos (57.7 %), seguida por Q. vaseyana Buckl. (23.1 %), Q. shumardii Buckl. (15.4 %) y Q. polymorpha Schltdl. & Cham. (3.8 %).
Nubes de puntos generados
Las mediciones de DAP, AT y DC mediante el MTF se realizaron en un lapso de 3 h. Con LIDAR portátil, el número de puntos generados ascendió a 39.4 millones (Figura 4); el tiempo del levantamiento de datos en campo fue de 40 minutos.
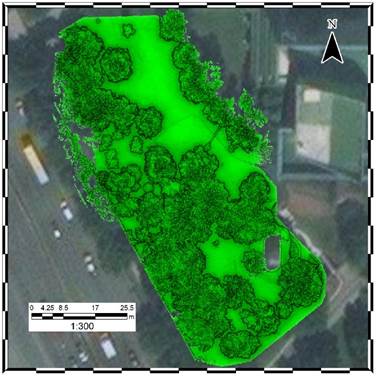
Figura 4 Nube de puntos de LIDAR portátil, para la medición de parámetros forestales en un bosque urbano.
El número de puntos de las nubes generadas con fotorreconstrucción (Figura 5) varió de 6 a 22 millones dependiendo del tamaño y número de fotografías obtenidos por cada tipo de sensor (RGB e IR) y por tipo de muestreo (a nivel de suelo y aéreo) (Cuadro 2). El tiempo estimado de recolección promedió 30 min a nivel de suelo y 5 a 10 min en el aéreo.
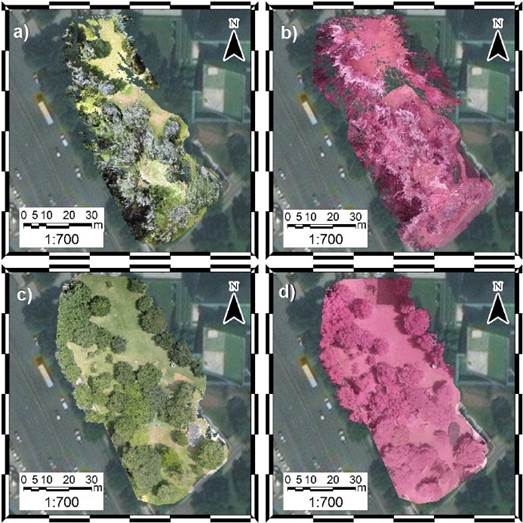
Figura 5 Nubes de puntos para la medición de parámetros forestales en un bosque urbano: a) Fotorreconstrucción (FR) de color normal a nivel de suelo, b) FR de color infrarrojo a nivel de suelo, c) FR de fotografía aérea de color normal y d) FR de fotografía aérea de color infrarrojo.
El tiempo invertido en el levantamiento de datos disminuyó 90 % mediante el LIDAR portátil, 83 % con los sensores ópticos a nivel de suelo y 97 % al montar los sensores en un VANT.
El nivel de geoposicionamiento de las nubes, en el que el LIDAR portátil se tomó como referencia, promedió 0.05 m de precisión espacial en XYZ. En el Cuadro 2 se observan los errores cuadráticos medios reportados por cada tipo de nube de puntos.
Cuadro 2 Número de puntos generados con los métodos de fotorreconstrucción (FR) y error cuadrático medio (ECM) de registro.
| Nube de puntos | Número de puntos | ECM |
|---|---|---|
| FR de color normal a nivel de suelo | 22 405 651 | 0.13 |
| FR de color infrarrojo a nivel de suelo | 9 887 539 | 0.20 |
| FR de fotografía aérea de color normal | 12 138 416 | 0.08 |
| FR de fotografía aérea de color infrarrojo | 6 332 972 | 0.10 |
El balance de precisión para la generación del filtro de clasificación entre suelo y árboles fue de 98.34 %. Un ejemplo se muestra en la Figura 6. Al realizar la clasificación de prueba, 1.12 % de los 10 000 puntos pertenecientes a la clase de suelo en realidad correspondieron a la clase de árboles; mientras que 1.66 % de los 10 000 puntos de prueba de la clase de árboles se clasificaron erróneamente. Los resultados de este filtro se utilizaron para todas las nubes de puntos ya que poseían características geométricas similares a la nube con la cual fue generado.
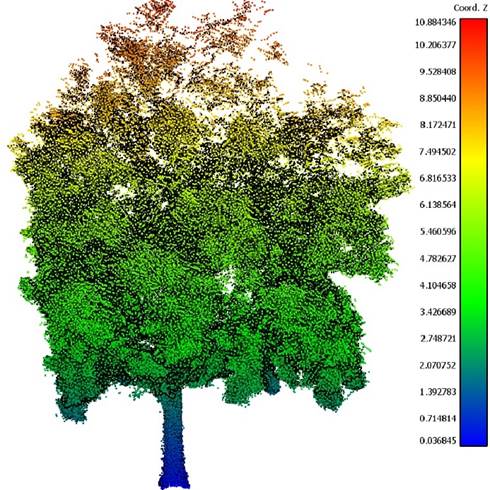
Figura 6 Nube de puntos (aislada) de un árbol. Los puntos se obtuvieron de la clasificación de la nube completa. Los colores indican elevación sobre el suelo.
En cuanto a las FR a nivel del suelo se obtuvieron valores de R2 = 0.824 en RGB y R2 = 0.745 en IR. La reducción en la precisión de estos métodos radica en cuatro factores principales. El primero es la dificultad del algoritmo para identificar las variaciones de intensidad que delimitan las copas en las fotografías. Esto ocurre debido a que los árboles, a diferencia de los objetos sólidos, presentan gran cantidad de huecos entre sus hojas y ramas, los cuales son cubiertos por objetos del fondo como cercas, edificaciones y, en la mayoría de los casos, por el cielo. Para disminuir el ruido de esta fuente se crearon máscaras semiautomáticas para cada fotografía; es decir, las zonas no correspondientes al área de interés para la FR se delimitaron con el fin de minimizar el ruido ocasionado por estos pixeles. En segundo lugar, las sombras ocasionadas por la densidad del dosel dificultan el proceso de identificación y clasificación de puntos (a la categoría de interés) de manera automática. Otro factor es la presencia de árboles menores de 7 cm de DAP y arbustos, los cuales produjeron gran cantidad de puntos de ruido. Por último, la variación de la distancia entre la cámara y el objetivo genera densidades diferentes de puntos a lo largo de la nube, lo cual mejora o empeora los resultados en zonas variables dependiendo de las posiciones de la obtención de las fotografías.
Las FR desde VANT presentaron los valores de R2 más bajos del estudio (R2 = 0.653 para RGB y R2 = 0.667 para IR). La principal limitante de esta metodología fue la falta de información para una reconstrucción adecuada del DAP para derivar los parámetros faltantes por oclusión.
El desarrollo de algoritmos y programas computacionales para la detección automática de parámetros forestales a partir de nubes de puntos 3D es reciente (Liang et al., 2014a; Liang et al., 2014b; Moskal & Zheng, 2012; Seidel, Albert, Ammer, Fehrmann, & Kleinn, 2013) y se encuentra en mejora constante. Su aplicación ha demostrado ser eficiente con la correspondiente validación de la metodología tradicional (Yépez & Lozano, 2014).
Parámetros forestales de sensores remotos
Los valores de DAP, AT y DC se lograron obtener para cada árbol, y de forma semiautomática, con los métodos de LIDAR portátil y las FR, tanto a nivel del suelo como desde un VANT. Los resultados se muestran en el Cuadro 3. Los DAP generados con sensores remotos que presentaron mayor diferencia con los obtenidos a través de MTF fueron FR de fotografía aérea de color normal (8.74 cm) y FR de fotografía aérea de color infrarrojo (8.60 cm); las menores diferencias se registraron con la FR de color infrarrojo a nivel de suelo (0.03 cm) y LIDAR portátil (0.24 cm). Con respecto a la AT, las mayores diferencias de medición se presentaron en la FR de color normal a nivel de suelo (0.60 m) y LIDAR portátil (0.36 m), y la menor diferencia se obtuvo con la FR de color infrarrojo a nivel de suelo (0.08 m). Para el DC, las mayores diferencias se encontraron en las FR de color normal e infrarrojo a nivel de suelo con 0.99 y 0.65 m, respectivamente, mientras que la medición con FR de fotografía aérea de color infrarrojo fue igual que la obtenida con el MTF.
Cuadro 3 Parámetros forestales de 26 árboles de Quercus, obtenidos con el método tradicional forestal y sensores remotos.
| Método | DAP (cm) | Altura total (m) | Diámetro de la copa (m) |
|---|---|---|---|
| Tradicional forestal | 36.76 | 8.28 | 9.51 |
| LIDAR portátil | 37.00 | 7.92 | 9.18 |
| FR de color normal a nivel de suelo | 35.73 | 8.88 | 8.52 |
| FR de color infrarrojo a nivel de suelo | 36.73 | 8.37 | 8.86 |
| FR de fotografía aérea de color normal | 28.02 | 8.46 | 9.45 |
| FR de fotografía aérea de color infrarrojo | 28.16 | 8.42 | 9.51 |
DAP: diámetro a la altura del pecho, FR: fotorreconstrucción.
En México, la presencia de ecuaciones que permitan la estimación del DAP a partir de la AT y DC, para el género Quercus, es inexistente; por ello se recurrió al uso de ecuaciones obtenidas de mediciones en otras partes del mundo (Balenović et al., 2012). Esto se refleja en una baja precisión de la estimación, lo cual generó una subestimación de la biomasa aérea calculada mediante datos obtenidos desde el VANT.
Cálculo de biomasa aérea
La biomasa aérea se calculó con datos del MTF a través de las ocho ecuaciones alométricas existentes en la región para el género Quercus. Se hizo una comparación por medio de pruebas t de student (P = 0.01), para determinar si existían diferencias estadísticamente significativas entre los resultados de cada ecuación. Con base en este análisis se encontró la ecuación de mayor similitud con el resto. De acuerdo con el Cuadro 4, las fórmulas de Aguirre y Jiménez (2011) y Rojas-García (2015) tuvieron el mayor número de coincidencias.
Cuadro 4 Características de ecuaciones alométricas empleadas en la estimación de biomasa aérea del género Quercus.
| Especie | Estado | Ecosistema | R2 | Tamaño de muestra | Autor |
|---|---|---|---|---|---|
| Quercus polymorpha | Nuevo León | Bosque de pino-encino | 0.90 | 16 | Rojas-García et al. (2015) |
| Quercus spp. | Nuevo León | Bosque de encino-pino | 0.95 | 32 | Aguirre y Jiménez (2011) |
Los valores de biomasa aérea obtenida con cada uno de los métodos de sensores remotos se compararon contra los valores del MTF a través de regresiones lineales simples, cuadráticas y cúbicas; el modelo de la regresión lineal simple se seleccionó ya que ofreció mejor ajuste y fue el único método que presentó significancia (P < 0.001). Los resultados se muestran en el Cuadro 5. LIDAR portátil presentó la mejor relación con 94.53 % seguido de la FR de color normal a nivel de suelo con 82.48 %. Por otro lado, de acuerdo con el Cuadro 6, hay una variación importante en el cálculo de la biomasa aérea, ya que los valores en las determinaciones a nivel de suelo se duplicaron en comparación con los obtenidos en las FR aéreas (379 t en la FR de fotografía aérea de color normal hasta 650 t con LIDAR portátil); a nivel de piso, la biomasa también varió de 13 a 30 t respecto al MTF.
Cuadro 5 Regresión lineal simple de los diferentes métodos comparados con el método tradicional forestal, para la obtención de la biomasa aérea de árboles del género Quercus.
| Método | Ecuación | R2 (% ajustado) | Desviación estándar de residuos |
|---|---|---|---|
| LIDAR portátil | y = -20.90 + 1.041 x | 94.53 | 62.55 |
| FR de color normal a nivel de suelo | y = 45.43 + 0.8378 x | 82.48 | 95.04 |
| FR de color infrarrojo a nivel de suelo | y = -95.49 + 1.112 x | 74.55 | 140.69 |
| FR de fotografía aérea de color normal | y = -47.74 + 0.6594 x | 65.30 | 117.84 |
| FR de fotografía aérea de color infrarrojo | y = -29.85 + 0.6496 x | 66.76 | 112.46 |
FR: fotorreconstrucción. Los valores P del modelo y el término lineal, para cada método, fueron menores de 0.001.
Cuadro 6 Biomasa aérea (promedios de 26 árboles del género Quercus) estimada con los seis métodos evaluados.
| Método | Biomasa (t) |
|---|---|
| Tradicional forestal | 637.92 |
| LIDAR portátil | 650.03 |
| FR de color normal a nivel de suelo | 621.64 |
| FR de color infrarrojo a nivel de suelo | 616.37 |
| FR de fotografía aérea de color normal | 379.35 |
| FR de fotografía aérea de color infrarrojo | 384.56 |
Limitantes del diseño de levantamiento
Uno de los aspectos clave para la obtención de resultados de calidad en la estimación de biomasa aérea es una buena planeación de la ruta a recorrer, para lo cual, dependiendo del sensor a utilizar se deben considerar ciertos factores: 1) la distancia entre el sensor y la muestra, 2) el traslape de imágenes para realizar una FR efectiva y 3) la ubicación espacial de los árboles. Los resultados indicaron que, debido al diseño de la ruta seguida con LIDAR portátil y las FR a nivel de suelo (RGB e IR), no se pudieron obtener datos (puntos en el caso del LIDAR o fotografías en las FR) de todas las caras de los troncos de los árboles analizados, ya que las condiciones del terreno y los objetos obstruían la visualización. Además, para asegurar la sobreposición deseada entre las fotografías, hubo diferencias en la distancia entre una toma y otra, en la altura y en el ángulo que fueron ocasionadas por la irregularidad del terreno.
El uso de los sensores ópticos al nivel del suelo generó mayor oclusión en las partes superiores de las copas de los árboles, en especial en áreas donde no se pudo obtener la información necesaria para generar la estructura 3D, debido a la posición de la cámara y el ángulo al momento de las tomas. Un efecto similar se dio en la zona central del área de estudio, donde las caras laterales de las copas no se distinguieron a causa de una mayor densidad de árboles contiguos. Otro factor que ocasionó errores en las reconstrucciones de los troncos fueron las sombras del dosel arbóreo y la presencia de árboles de DAP < 7 cm y arbustos.
Un aspecto positivo de la fotografía aérea es el abaratamiento de costos de la tecnología de VANT y su sencillez de uso; sin embargo, la medición de troncos de árboles se dificulta, por lo cual la estimación se hace partir de la AT y DC.
Limitantes de los sensores ópticos
La resolución de cada sensor repercutió en la calidad y la densidad de puntos. Tal efecto se observó en las fotografías capturadas con la integración del lente infrarrojo. Debido a las características del lente, a nivel del suelo, la resolución máxima con IR representó una reducción de 60 % del número total de puntos en comparación con los datos RGB, mientras que en la reconstrucción 3D generada a partir de VANT, la resolución con IR se redujo 50 % (Cuadro 2). La resolución de las cámaras para la obtención de las fotografías a color e infrarrojas impactó en la cantidad de datos generados en las nubes de puntos al llevar a cabo el procesamiento fotogramétrico; se obtuvieron nubes más densas con las fotografías a color en comparación con obtenidas con la cámara infrarroja.
Uso extensivo del LIDAR terrestre
Una de las ventajas del uso del LIDAR portátil fue el poder obtener la estructura tridimensional de los árboles. Considerando el uso de este método en áreas más extensas o complejas, el factor más importante que se determinó en este trabajo fue el diseño de la ruta de levantamiento de datos para obtener una nube de puntos de todas las facetas de los árboles. Otro elemento relevante es la época de la toma de datos; la presencia de un dosel muy denso con gran cantidad de hojas puede limitar el registro de datos más allá del tronco y las ramas principales de los árboles, aunque esto dependerá de los objetivos del levantamiento.
Todos los sistemas tienen sus limitaciones, el LIDAR portátil únicamente mide la distancia del sensor a objeto; no mide la intensidad de la señal que regresa al sensor ni el número de retornos de la señal, condiciones que facilitarían la clasificación de la nube de puntos. Los aspectos técnicos del LIDAR (distancia hacia los objetos y resolución de la nube de puntos), están fuera del control del analista pues son características fijas del sistema utilizado. Los sensores terrestres (tanto el color normal como el infrarrojo) no permiten obtener la información de la parte alta de las copas de los árboles, mientras que los sensores montados en un VANT no pueden obtener datos de las dimensiones del tronco principal. Algunas de estas limitaciones son relativamente fáciles de subsanar; se puede diseñar una misión que obtenga datos terrestres y aéreos simultáneamente y generar una nube de puntos más completa.
Conclusiones
La altura, diámetro de copa y diámetro a la altura del pecho (DAP) de cada árbol se lograron obtener de forma semiautomática con los métodos LIDAR portátil y fotorreconstrucción (FR), tanto a nivel del suelo como desde un vehículo aéreo no tripulado (VANT). LIDAR portátil representó la alternativa más precisa (R2 = 0.945) para realizar el cálculo de la biomasa aérea, tomando como referencia la estimación a través del método tradicional forestal (MTF). En contraste, la FR de fotografía aérea de color normal mostró los resultados más pobres (R2 = 0.653), debido a la imposibilidad de medir el DAP. El tiempo invertido en el levantamiento de datos con los sensores disminuyó más de 80 % con relación al MTF. La tecnología LIDAR portátil y los sensores ópticos son alternativas de bajo costo para la obtención de nubes de puntos y tienen potencial para la generación de datos de aplicación forestal.
Agradecimientos
Al Consejo Nacional de Ciencia y Tecnología (CONACYT) por la beca otorgada a Roberto E. Huerta para realizar sus estudios de maestría.
REFERENCIAS
Aguirre, C. O. A., & Jiménez, P. J. (2011). Evaluación del contenido de carbono en bosque del sur de Nuevo León. Revista Mexicana de Ciencias Forestales, 2(6), 73-84. Retrieved from http://www.scielo.org.mx/scielo.php?script=sci_arttext&pid=S2007-11322011000400007 [ Links ]
Balenović, I., Seletković, A., Pernar, R., Ostrogović, M. Z., & Jazbec, A. (2012). Regression models of DBH estimation for photogrammetric measurement. Journal of Forestry Society of Croatia, 136(3-4), 129-139. Retrieved from https://hrcak.srce.hr/index.php?id_clanak_jezik=120571&show=clanak [ Links ]
Bosse, M., Zlot, R., & Flick, P. (2012). Zebedee: Design of a spring-mounted 3-D range sensor with application to mobile mapping. IEEE Transactions on Robotics, 28(5), 1104-1119. doi: 10.1109/TRO.2012.2200990 [ Links ]
Brodu, N., & Lague, D. (2012). 3D Terrestrial LIDAR data classification of complex natural scenes using a multi-scale dimensionality criterion: Applications in geomorphology. ISPRS Journal of Photogrammmetry and Remote Sensing, 68, 121-134. Retrieved from https://arxiv.org/pdf/1107.0550.pdf [ Links ]
Calders, K., Newnham, G., Burt, A., Murphy, S., Raumonen, P., Herold, M., ...Kaasalainen, M. (2014). Nondestructive estimates of above-ground biomass using terrestrial laser scanning. Methods in Ecology and Evolution, 6(2), 198-208. doi: 10.1111/2041-210X.12301 [ Links ]
Chen, T. C., & Chung, K. L. (2001). An efficient randomized algorithm for detecting circles. Comput Vis Image Und, 83(2), 172-191. doi: 10.1006/cviu.2001.0923 [ Links ]
Dassot, M., Constant, T., & Fournier, M. (2011). The use of terrestrial LiDAR technology in forest science: application fields, benefits and challenges. Annals of Forest Science, 68(5), 959-974. doi: 10.1007/s13595-011-0102-2 [ Links ]
Li, X., Chen, Z., Zhang, L., & Jia, D. (2016). Construction and accuracy test of a 3D model on non-metric camera images using Agisoft PhotoScan. Procedia Environmental Sciences, 36, 84-190. doi: 10.1016/j.proenv.2016.09.031 [ Links ]
Liang, X., Hyyppä, J., Kukko, A., Kaartinen, H., Jaakkola, A., & Yu, X. (2014a). The use of a mobile laser scanning system for mapping large forest plots. IEEE Transactions on Geoscience and Remote Sensing, 11(9), 1504-1508. doi: 10.1109/LGRS.2013.2297418 [ Links ]
Liang, X., Jaakkola, A., Wang, Y., Hyppä, J., Honkavaara, E., Liu, J., & Kaartien, H. (2014b). The use of a hand-held camera for individual tree 3d mapping in forest sample plots. Remote Sensing, 6(7), 6587-6603. doi: 10.3390/rs6076587 [ Links ]
Moskal, M., & Zheng, G. (2012). Retrieving forest inventory variables with terrestrial laser scanning (tls) in urban heterogeneous forest. Remote Sensing , 4(1), 1-20. doi: 10.3390/rs4010001 [ Links ]
Návar, J. (2009). Allometric equations for tree species and carbon stocks for forests of northwestern Mexico. Forest Ecology and Management, 257, 427-434. doi: 10.1016/j.foreco.2008.09.028 [ Links ]
Návar-Cháidez, J. J. (2010). Biomass allometry for tree species of northwestern Mexico. Tropical and Subtropical Agroecosystems, 12(3), 507-519. Retrieved from http://www.revista.ccba.uady.mx/ojs/index.php/TSA/article/view/391/393 [ Links ]
Rodríguez, R., Jiménez, J., Aguirre, Ó. A., Treviño, E. J., Razo, R. (2009). Estimación de carbono almacenado en el bosque de pino-encino en la Reserva de la Biosfera El Cielo, Tamaulipas, México. Ra Ximhai, 5(3) 317-327. Retrieved from http://www.redalyc.org/pdf/461/46111817006.pdf [ Links ]
Rojas-García, F., De Jong, B. H. J., Martínez-Zurimendí, P., & Paz-Pellat, F. (2015). Database of 478 allometric equations to estimate biomass for Mexican trees and forests. Annals of Forest Science, 72, 835-864. doi: 10.1007/s13595-015-0456-y [ Links ]
Seidel, D., Albert, K., Ammer, C., Fehrmann, L., & Kleinn, C. (2013). Using terrestrial laser scanning to support biomass estimation in densely stocked young tree plantations. International Journal of Remote Sensing , 34, 8699-8709. doi: 10.1080/01431161.2013.848308 [ Links ]
Trochta, J., Krůček, M., Vrška, T., & Král, K. (2017). 3D Forest: An application for descriptions of three-dimensional forest structures using terrestrial LiDAR. PLoS ONE, 12(5), e0176871. doi: 10.1371/journal.pone.0176871 [ Links ]
Xu, L., & Oja, E. (1993). Randomized Hough Transform (RHT): Basic mechanisms, algorithms, and computational complexities. CVGIP: Image understandings, 57(2), 131-154. doi: 10.1006/ciun.1993.1009 [ Links ]
Yépez, F. D., & Lozano, D. F. (2014). Mapeo del arbolado urbano con LIDAR aéreo. Revista Mexicana de Ciencias Forestales, 5, 58-75. Retrieved from http://www.redalyc.org/articulo.oa?id=63439016005 [ Links ]
Recibido: 22 de Septiembre de 2017; Aprobado: 09 de Marzo de 2018
 This is an open-access article distributed under the terms of the Creative Commons Attribution License
This is an open-access article distributed under the terms of the Creative Commons Attribution License
