











 nova página do texto(beta)
nova página do texto(beta) Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
PermalinkIntroducción
La puesta en órbita de satélites despertó el interés de la comunidad científica por utilizar imágenes satelitales para obtener información de manera remota de variables agrícolas que presentan alta variabilidad espacio-temporal y que demandan un monitoreo frecuente, tales como la superficie cultivada, la etapa fenológica de los cultivos y el rendimiento (Jackson, 1984). Hoy en día, estas variables son monitoreadas gracias a sensores instalados en vehículos aéreos y a métodos de análisis, procesamiento y despliegue de datos (Zhang & Kovacs, 2012). Sin embargo, ante la demanda de información detallada, los satélites tienen la limitante de suministrar información temporal discontinua y de baja resolución espacial (Mulla, 2013). Una alternativa al uso de satélites para la adquisición de datos remotos son los Vehículos Aéreos No Tripulados (VANTs), conocidos de manera coloquial como drones o UAVs (Unmanned Aerial Vehicles). El uso de VANTs facilita el monitoreo frecuente de parámetros de cultivos, que anteriormente tenía restricciones a través de imágenes satelitales. Las aplicaciones de VANTs en la agricultura son diversas, y las necesidades actuales perfilan esta herramienta con un gran potencial para utilizarse en actividades de planeación, monitoreo y control de actividades agrícolas.
En la última década se han publicado múltiples trabajos sobre el uso de VANTs en diversas áreas del saber humano. Sin embargo, se requiere una síntesis de aplicaciones en hidroagricultura. Este trabajo documenta el uso de drones en dicha área, con el fin de analizar las ventajas de su aplicación en la agricultura de riego, particularmente en el riego de precisión y el monitoreo de la infraestructura.
Definición y ventajas de los VANTs
Un VANT es un vehículo aéreo reusable, controlado de forma remota, semiautónomo o autónomo (Eisenbeiss, 2009), acondicionado para llevar dispositivos auxiliares para actividades de monitoreo o control. Otros términos son drone, dron, UAV o RPA (Remotely Piloted Aircraft). Los VANTs presentan varias ventajas con respecto al uso de los vehículos tripulados o los satélites, como tener acceso a zonas de geografía complicada a baja altura y obtener imágenes de alta resolución en “tiempo real” a muy bajo costo. Al ser eléctricos en su mayoría, se les considera “amigables” con el ambiente. Entre sus desventajas, se tiene la dependencia de una estación de seguimiento en tierra, costo de equipamiento y restricciones de peso, volumen de carga y tiempo de vuelo. Otra desventaja está relacionada con la regulación y normatividad de uso del espacio aéreo para este tipo de vehículos. Por ejemplo, en México, los drones sólo deben ser utilizados durante el día, en áreas que no estén clasificadas como restringidas o peligrosas (SCT, 2015).
Componentes y clasificación
En la terminología, se utiliza el concepto de Sistema de Aviación No Tripulado (SANT) para incluir, además del vehículo aéreo, una estación de control a tierra, así como los dispositivos para despegue y aterrizaje. Un SANT consta de los siguientes elementos principales (Chao & Chen, 2012):
Vehículo aéreo integrado por: a) autopiloto: sistema microelectromecánico usado para guiar al VANT en forma autónoma, que consiste de un procesador central (hardware) y un software de navegación GPS, capaz de realizar el despegue y el aterrizaje; b) fuselaje: estructura del VANT, donde se montan dispositivos externos para actividades de monitoreo, control, geoposicionamiento, y estructuras de carga complementarias, como soportes para cámaras y equipos auxiliares (como aplicadores de agroquímicos); c) carga útil: dispositivos no relacionados con la tarea de vuelo, que incluye sensores pasivos, como las cámaras espectrales, o activos, como el sistema LIDAR (Light Detection and Ranging); d) subsistema de comunicación, la mayoría de los VANTs cuentan con enlaces inalámbricos para comunicación con la estación terrestre, como radio y WiFi para compartir datos y telemetría.
Estación de control terrestre. Para monitoreo y control de la misión en tiempo real. Tradicionalmente, incluye un monitor OSD (On Screen Display), que muestra los datos telemétricos de la misión en curso, como el estado de la señal GPS, localización del VANT, nivel de carga de baterías y tiempo de vuelo.
Dispositivos de despegue y aterrizaje. Varios VANTs (en particular los de ala fija) requieren de dispositivos especiales para despegue, como lanzador hidráulico, o redes para aterrizaje.
De acuerdo con Nonami, Kendoul, Suzuki, Wang y Nakazawa (2010), un VANT puede clasificarse en alguno de los siguientes grupos:
De ala fija. Con forma típica de aeroplano, requieren espacio para el despegue y aterrizaje, o catapulta para su lanzamiento. Pueden volar a mayores velocidades de crucero que los de ala rotatoria.
De ala rotatoria. Altamente maniobrables, pueden aterrizar y despegar de forma vertical. Se dividen en helicópteros (de una hélice) o multirrotores (con más de una hélice), y cuentan con capacidad de girar sobre su eje y moverse en cualquier dirección. Se clasifican de acuerdo con el número de hélices (la Figura 1 muestra un hexacóptero, con seis hélices). Por su estabilidad de vuelo, tamaño y bajo precio, los multicópteros resultan muy útiles para aplicaciones civiles de precisión a baja altura.
Dirigibles o globos. Más ligeros que el aire, pueden tener vuelos de larga duración, pero a baja velocidad. Por lo general tienen forma alargada.
De aleteo. VANTs con pequeñas alas flexibles y/o adaptables, en analogía con los insectos.

Figura 1 Hexacóptero fabricado por Dronetools, España (usado para generar las imágenes de este trabajo).
De acuerdo con Van Blyenburgh (2013), las diferencias generales por tipo de VANTs, con fines de monitoreo remoto, son las siguientes, expresadas en peso, autonomía y carga por peso (Cuadro 1).
Cuadro 1 Características de los VANTs equipados con sensores remotos (Van Blyenburgh, 2013).
| Nombre | Peso (kg) | Autonomía (h) | Carga por peso (kg) |
|---|---|---|---|
| Ala fija | 0.5-4 | 0.5-2 | 1 |
| Multirrotores (alas rotatorias) | 1.2-3 | 0.33-1.46 | 0.75-2.5 |
| Helicóptero (un ala rotatoria) | 90-100 | 1-2 | 28-30 |
Uso de VANTs en la agricultura
Con base en los trabajos de Chao y Chen (2012), un sistema que integra a un VANT para aplicaciones de uso agrícola debe tener las siguientes características: a) bajo costo, que depende del tipo de VANT y del nivel de equipamiento; b) amplia cobertura espacial, para el monitoreo de decenas a miles de hectáreas, que depende de la velocidad, altura y duración del vuelo, así como de las características de la cámara, como el ángulo de visión, distancia focal, y tamaño del sensor; c) monitoreo frecuente de variables de procesos o actividades que presentan alta variabilidad espacial y temporal, como la aplicación del riego, desarrollo fenológico, y estado fitosanitario y nutricional de los cultivos; d) alta resolución espacial, para la toma y clasificación de imágenes que permitan detectar con precisión el grado de afectación o estrés de una parcela a una variable ambiental, hídrica, edáfica o vegetal; e) facilidad de manipulación, para los procedimientos de adquisición, manejo y análisis de datos; f) algoritmos avanzados de monitoreo/actuación, que permitan programar y ejecutar misiones de vuelo de manera eficiente, rápida y confiable.
Las aplicaciones de los VANTs están estrechamente relacionadas con la percepción remota, en particular con la teledetección. Tradicionalmente, las plataformas para realizar esta tarea consistían de sensores montados en satélites, aviones y vehículos terrestres. La teledetección de variables agrícolas se basa en el principio de que la radiación reflejada por las plantas es inversamente proporcional a la radiación absorbida por pigmentos de la planta, y varía con la longitud de onda de la radiación incidente. La mayoría de los pigmentos, como la clorofila, absorben la radiación en el espectro visible de 400 a 700 nm (Pinter et al., 2003). En el caso de los suelos desnudos, la radiación se ve afectada principalmente por la humedad del suelo y el contenido de materia orgánica (Viscarra-Rossel, Walvoort, McBratney, Janik, & Skjemstad, 2006). El suelo desnudo y el dosel de los cultivos a menudo están presentes en una imagen espectral, y la mezcla de dos firmas espectrales puede confundir la interpretación de los datos de reflectancia (Figura 2). De manera usual se recurre a la mezcla de dos o más regiones espectrales a través de índices espectrales, como el índice diferencial de vegetación normalizado NDVI (Deering, 1978), que resalta una característica de interés (vegetación) de la superficie terrestre y oculta otras.
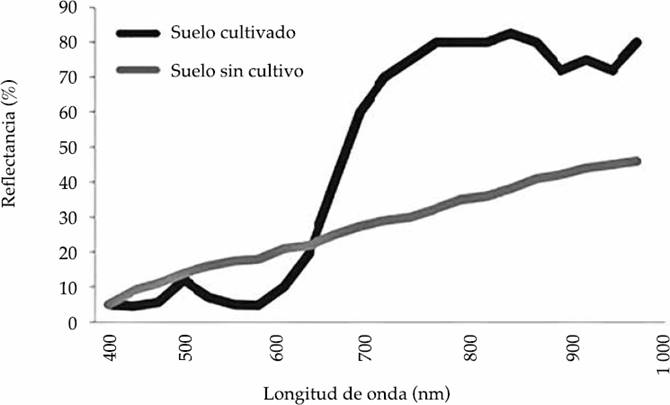
Figura 2 Comparación de firmas de reflectancia de una misma parcela sin cultivo y con cultivo de papa (Mulla, 2013).
Algunas de las aplicaciones de teledetección en la agricultura son, por ejemplo, la predicción del rendimiento de los cultivos (Shanahan et al., 2001), y la determinación del grado del estrés nutricional e hídrico de los cultivos (Clayl, Kim, Chang, Clay, & Dalsted, 2006). No obstante su utilidad, los VANTs tienen algunas limitaciones, como plataformas de teledetección, debido principalmente al tiempo de vuelo y la capacidad de carga útil, por lo que es necesario balancear las limitaciones tecnológicas inherentes al tamaño de la plataforma y a la miniaturización de los sensores. Por lo regular se economiza en los materiales, afectando la calidad de los datos, la precisión de los sensores, la capacidad de almacenamiento y la calidad del hardware de procesamiento a bordo del VANT (Kelcey & Lucieer, 2012). Una relación muy completa de categorías y capacidades de estos vehículos puede encontrarse en Watts, Ambrosia y Hinkley (2012).
La fotogrametría es otra técnica cuya aplicación en la agricultura se ha visto beneficiada con el uso de drones. La fotogrametría permite estimar las propiedades geométricas de los objetos y su ubicación espacial a partir de fotografías. Entre sus herramientas se tienen la generación de ortomosaicos y los Modelos Digitales de Elevación (MDE). Un ortomosaico es una imagen compuesta georreferenciada, obtenida por un algoritmo de triangulación en imágenes traslapadas. Un MDE es una representación cartográfica digital de la elevación de la superficie de la Tierra (Farah, Talaat, & Farrag, 2008), y permite la extracción de atributos de interés de la superficie terrestre, como pendiente, elevación, curvatura y dirección de flujo. La principal desventaja del uso de VANTs en fotogrametría es que se requiere software especializado para el procesamiento de imágenes, lo que incrementa el costo de la plataforma. Además, los tipos de cámara soportados están limitados por la capacidad de carga y el software de la controladora de vuelo. La precisión de los modelos fotogramétricos está directamente relacionada con la altura de vuelo, resolución de la cámara, y cantidad y precisión de los puntos de control (PC) de referencia terrestre (Chandler, 1999). Por ejemplo, D’Oleire-Oltmanns, Marzolff, Klaus y Ries (2012) reportan precisiones de 9 y 27 mm en la horizontal, con 7 mm en la vertical para imágenes, cubriendo 4.1 ha, con un VANT a 70 m de altura y 80 PC medidos con estación total. En general, la determinación de la precisión suele requerir mucho tiempo y trabajo de campo (D’Oleire-Oltmanns et al., 2012).
La mayor parte de las aplicaciones actuales de VANTs en la agricultura se relacionan con la agricultura de precisión y con el monitoreo de la infraestructura de riego, temas que se abordan a continuación.
VANTs y la agricultura de precisión
La agricultura de precisión es el conjunto de técnicas que facilitan una mejor gestión de los sistemas agrícolas, con base en un manejo espacial diferenciado de la parcela a través de la aplicación de insumos, en función de la variabilidad espacial que afecta el rendimiento de los cultivos (Leyva, Alves de Souza, & Orlando, 2001). La agricultura de precisión tiene tres áreas potenciales de aplicación:
Mapeo de propiedades/variables parcelarias. La estimación remota de la propiedades físico/ químicas/biológicas parcelarias son de gran utilidad para programar actividades agrícolas, como determinación de zonas degradadas o contaminadas (Qiao et al., 2011); caracterización de suelos con potencial de uso agrícola (Young et al., 2010); caracterización química o física de suelos (Parvage, Ulén, & Kirchmann, 2013), y detección de malas hierbas (Torres-Sánchez, Peña, De Castro, & López-Granados, 2014).
Monitoreo hídrico de cultivos. El estrés hídrico afecta la fotosíntesis y reduce la productividad de los cultivos. La detección del estrés se dificulta cuando los efectos no son visuales y es imprescindible conocer los efectos a nivel espectral. En condiciones de estrés hídrico, la luz absorbida excede la demanda fotosintética y es disipada por las plantas como fluorescencia clorofílica y como calor para evitar daño oxidativo inducido. Esto puede ser detectado usando índices, como el de reflectancia fotoquímica, obtenido a través de imágenes hiperespectrales y sensores remotos. Las imágenes se obtienen desde vehículos aéreos, y se utilizan para generar mapas de estrés hídrico y de temperatura de los cultivos (Rossini et al., 2013).
Riego de precisión. El riego de precisión permite el acoplamiento preciso, en volumen y oportunidad, de la aplicación del riego con las necesidades hídricas de los cultivos, cuyo desfasamiento impacta en la productividad. El riego de precisión fundamenta su desarrollo y aplicación en cuatro componentes: a) adquisición de datos en “tiempo real” de variables del suelo, cultivo y ambiente; b) procesamiento de la información geoespacial para la toma de decisiones y aplicación óptima del riego; c) desarrollo de tecnología que permita la aplicación del agua e insumos en el momento, cantidad y lugar “exacto”, y d) desarrollo de herramientas de evaluación y monitoreo para medir el desempeño del riego y proponer mejoras en cualquier componente del sistema (Smith, Baillie, McCarthy, Raine, & Baillie, 2010).
Los VANTs pueden ser utilizados para monitorear variables de interés y realizar la aplicación diferenciada de recursos, por lo que existen varios trabajos de su empleo en la agricultura de precisión. Xiang y Lei (2011) utilizaron un VANT para monitorear el desarrollo de un cultivo forrajero y diferentes acciones de manejo usando imágenes de falso color y variación del índice NDVI. Eisenbeiss (2009) aprovechó un VANT para evaluar la producción de maíz modificado genéticamente usando un modelo MDE y ortomosaicos de alta resolución. Ouédraogo, Degré, Debouche y Lisein (2014) recolectaron datos topográficos de alta resolución en una cuenca pequeña de 12 hectáreas, con el fin de comparar la precisión de la fotogrametría lograda a partir de imágenes adquiridas por VANTs y un láser escáner terrestre (Terrestrial Laser Scanning, TLS). En este último trabajo se señala que los VANTs son una herramienta prometedora para la adquisición remota de datos por su flexibilidad y bajo costo, pero con ajustes aún pendientes para eliminar distorsiones no lineales generadas durante la etapa del procesamiento fotogramétrico.
VANTs y el monitoreo de la infraestructura hidroagrícola
La infraestructura hidroagrícola u obras de ingeniería civil se destinan a almacenar, derivar, conducir o entregar el agua a usuarios de una zona de riego, como presas de almacenamiento o de derivación, canales y diques. Esta infraestructura debe ser supervisada para conocer su estado y programar su conservación, rehabilitación o modernización tanto en condiciones normales de operación como en casos de afectación por desastres naturales. La fotogrametría, la percepción remota y los VANTs facilitan la supervisión, al ofrecer las siguientes ventajas:
Se obtienen fotografías y videos en alta resolución de la obra en pocas misiones de vuelo, a un bajo costo. Los drones vuelan cerca de la superficie de interés para localizar grietas, problemas de erosión, corrosión y defectos de construcción, que de otro modo requerirían plataformas, andamios, escaleras o arneses de seguridad. Anteriormente esta tarea demandaba el uso de vehículos tripulados o brigadas de supervisión, con un gran consumo de tiempo y recursos.
No se expone la vida del operador. El recorrido se programa de forma remota y se asiste por medio de un sistema de seguimiento computarizado.
En el VANT se pueden colocar cámaras térmicas y termográficas, útiles en la detección de corrosión, fugas y motores con problemas de calentamiento.
Las imágenes aéreas y la percepción remota se han utilizado en el pasado para monitorear la infraestructura. Huang, Fipps, Maas y Fletcher (2009) emplearon combinaciones de imágenes visibles, infrarrojas y térmicas para detectar fugas en 439 sitios en canales de 11 distritos de riego de Texas, EUA. Las imágenes se tomaron con una avioneta a 914 m de altura, con una resolución de 0.64 m/pixel para las imágenes en infrarrojo y de 2.07 m/pixel para las imágenes térmicas, detectando fugas en 140 sitios. Agapiou et al. (2014) reportaron el uso de un octocóptero equipado con una cámara RGB y otra multiespectral para detectar fugas en tuberías subterráneas, usando fotografías de alta resolución tomadas a baja altitud. Las imágenes se usaron para detectar cambios en las propiedades del suelo y el crecimiento anómalo de vegetación a lo largo de la ruta de la tubería. Modelos digitales de elevación (Figura 3) y ortomosaicos (Figura 4) se usan con frecuencia para supervisar el estado de la infraestructura hidroagrícola.
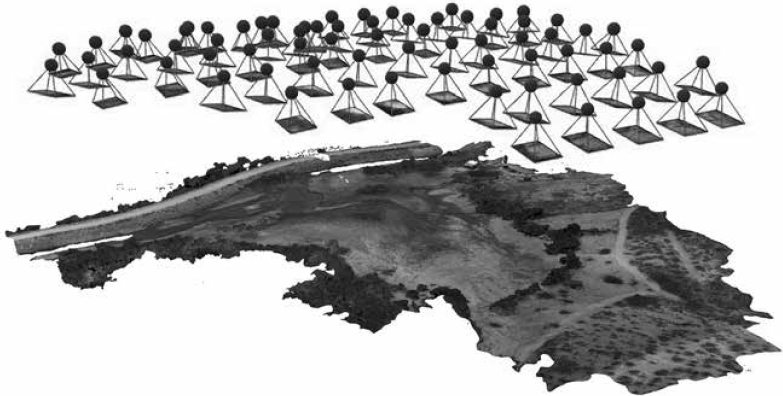
Figura 3 Modelo de elevación digital de un dique en Culiacán, México, construido a partir de imágenes tomadas desde un VANT. La imagen muestra las distintas posiciones de la cámara en la trayectoria de vuelo al momento de tomar las fotografías.

Aplicaciones en las áreas de riego y drenaje
Se identifican cuatro áreas de interés para la aplicación de VANTs en zonas de riego: 1) la cuenca de abastecimiento de la zona de riego; 2) la infraestructura utilizada para conducir el agua de la fuente a la parcela, así como drenar los excedentes del agua de riego; 3) la aplicación del riego e insumos a la parcela, y 4) el monitoreo del estado hídrico y desarrollo de los cultivos. La estimación remota del desarrollo, crecimiento y evapotranspiración de los cultivos es donde se han concentrado mayores esfuerzos, pues la calendarización de insumos agrícolas como riego y fertilizantes se asocia con la fenológica de los cultivos. Tradicionalmente, se han utilizado imágenes de satélite para la estimación de la evapotranspiración de referencia y necesidades hídricas de los cultivos en los ámbitos regional o nacional (Vuolo D’Urso, De Michele, Bianchi, & Cutting, 2015). Sin embargo, su uso parcelario es restringido por la limitada resolución espacial y temporal de las imágenes satelitales, así como las observaciones termales y la complejidad de los algoritmos para implantar procedimientos operacionales en tiempo real.
La gestión de una zona de riego implica una serie de actividades cíclicas durante el desarrollo de un año agrícola, asociada con actividades de planeación, implantación, monitoreo y evaluación. Sin duda, los VANT son una herramienta potencial para apoyar en la estimación de cultivos establecidos, conocer el estado del riego parcelario, detectar zonas de baja eficiencia de riego, y para una diversidad de actividades requeridas en el monitoreo y evaluación del servicio de riego a los usuarios. A nivel parcela, la aplicación de los insumos y manejo de los recursos son tareas que requieren de un monitoreo frecuente. Por ejemplo, la Figura 4 muestra un ortomosaico obtenido de varias imágenes traslapadas, tomadas con un VANT durante la aplicación del primer riego con un sistema de riego por goteo, donde se aprecia una gran variación espacial de mojado en su aplicación. Sin duda, los vehículos aéreos pueden proporcionar información detallada para detectar anomalías, y evaluar la aplicación espacial y temporal del riego.
Conclusiones
Los VANTs están en pleno desarrollo y su aplicación en la agricultura es cada vez más común, no sólo para la adquisición de imágenes sino también para análisis más robustos de información geoespacial. La continua miniaturización de componentes con mayor precisión, así como la mejora de sistemas de navegación, ha popularizado los sistemas de teledetección basados en VANTs, ofreciendo la posibilidad de generar imágenes de mayor resolución y frecuencia. También se realizan esfuerzos importantes para mejorar el suministro de energía, como la optimización de la ruta de la misión, sistemas de propulsión híbridos, y sistemas de generación y administración de energía más eficientes. Relacionado con lo anterior está el aligeramiento de los materiales de fabricación, lo cual permite destinar la capacidad de carga a otros componentes de mayor utilidad, sin que esto implique consumo de energía adicional.
Los VANTs se perfilan como herramientas de apoyo en procesos de planeación, supervisión y estimación de parámetros y variables hidroagrícolas para ejecutar procesos optimizados en costo y tiempo. En ingeniería hidroagrícola, el uso de VANTs es ahora una herramienta indispensable en la toma de datos espaciales que permiten la discriminación de características de terreno relacionados con el uso, manejo y aplicación óptima de los insumos agrícolas, y el uso eficiente de los recursos agua, suelo y energía.
En la actualidad existe una preocupación generalizada sobre el uso inadecuado de estos equipos, que pudiera implicar riesgos para la población. En México, el marco legal para el uso masivo de drones en labores civiles está en desarrollo, pero ya contempla restricciones para su uso en ciertas zonas geográficas, limitación de la altura de vuelo, seguro para daños a terceros en aplicaciones comerciales y trámite de licencia de operación en equipos mayores a 25 kg de peso. Asuntos como la invasión a la privacidad y las sanciones están aún pendientes de regulación. Se espera que en el futuro, el gobierno y los usuarios de VANTs colaboren en la conformación de una legislación más acorde con las necesidades del país y las ventajas de esta tecnología.
El mayor problema que se enfrenta en el uso de VANTs es su alto costo inicial, debido a los sensores miniaturizados requeridos para obtener imágenes de alta resolución, así como a la inversión en el hardware y software de la etapa de post-proceso. Otras limitantes son el tiempo de vuelo, la capacidad de carga y el entrenamiento requerido para su operación. No obstante, se presenta una tendencia en el abatimiento de los costos y el mejoramiento de los equipos, lo que contribuye a que con mayor frecuencia se reporten nuevas aplicaciones hidroagrícolas utilizando VANTs.

