










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Similars in
SciELO
Similars in
SciELO
Share

 Permalink
PermalinkTecnología y ciencias del agua
On-line version ISSN 2007-2422
Tecnol. cienc. agua vol.3 n.3 Jiutepec Jul./Sep. 2012
Artículos técnicos
Operación de tres presas hidroeléctricas usando curvas guía y programación dinámica estocástica
Operation of three hydroelectric dams using guide curves and stochastic dynamic programming
Maritza L. Arganis-Juárez, Rosalva Mendoza-Ramírez y Ramón Domínguez-Mora
Universidad Nacional Autónoma de México.
Dirección institucional de los autores
Dra. Maritza L. Arganis Juárez
Universidad Nacional Autónoma de México
Instituto de Ingeniería
Ciudad Universitaria, Avenida Universidad 3000,
Delegación Coyoacán
04510 México, D.F., México
Teléfono: +52 (55) 5623 3600, extensión 8644
Fax: +52 (55) 5616 2164
MArganisJ@iingen.unam.mx
M.I. Rosalva Mendoza Ramírez
Universidad Nacional Autónoma de México
Tzintzuntzan 310, colonia Lomas de Vista Bella
58098 Morelia, Michoacán, México
Teléfono: +52 (443) 3223 896
rmr@pumas.iingen.unam.mx
Dr. Ramón Domínguez Mora
Universidad Nacional Autónoma de México
Instituto de Ingeniería
Edificio 5, piso 2, cubículo 325
Circuito Escolar, Ciudad Universitaria
04510 México, D.F., México
Teléfono: +52 (55) 5623 3600, extensión 3666
Fax: +52 (55) 56 16 21 64
rdominguezm@iingen.unam.mx
Recibido: 20/10/10
Aceptado: 27/03/12
Resumen
La programación dinámica (PD) fue desarrollada por Richard E. Bellman en la década de los cincuenta (Bellman, 1957). Es una herramienta matemática que ha sido utilizada en campos tan diversos como ingeniería, inteligencia artificial, economía, etcétera (Dormido et al., 2002). El campo de la planificación de recursos hidráulicos no ha sido la excepción y se reportan aplicaciones con buenos resultados en diversos países. Tiene como limitante un alto costo computacional; necesita de grandes recursos tanto de tiempo como de memoria y la demanda de ellos crece exponencialmente, al incrementar el número de variables de estado. En este trabajo se presenta la forma en que se organizó un programa de cálculo para contender con este problema y obtener las políticas de operación óptima de un sistema de tres presas que operan en cascada, variando condiciones de penalización por déficit, derrame o por exceder las curvas guía (que son los niveles de almacenamiento que se desea no sean rebasados durante la operación para la seguridad del sistema y que establece la Comisión Nacional del Agua). Las políticas obtenidas se simularon usando tanto el registro histórico como registros sintéticos para probar su bondad en el funcionamiento del sistema.
Palabras clave: programación dinámica, operación en cascada, políticas de operación, curvas guía.
Abstract
Dynamic Programming (DP) is an optimization procedure developed in the 1950s by Richard Bellman (Bellman, 1957). It is a mathematical tool that has been applied in several fields, including engineering, artificial intelligence and economics, among others (Dormido et al., 2002). The area of water resources planning is no exception and applications with good results have been reported in several countries. A limitation is high computing costs, the need for many resources both in terms of time as well as memory, with the demand of these resources growing exponentially as the number of state variables increases. This work presents a way in which to organize a computing program to handle this problem as well as to determine policies for the optimal operations of a system of three serial hydropower dams by varying the penalties for deficits, spills and exceeding guide curves (the storage levels not to be surpassed during operation for the safety of the system, which are established by the National Water Commission). The policies obtained were simulated using historical records and synthetic records to test their benefit to the operations of the system.
Keywords: dynamic programming, serial operation, operations policies, guide curves.
Introducción
La PD es una metodología matemática orientada a la solución de problemas en los que se deben tomar decisiones en un horizonte de planeación de N etapas sucesivas, teniendo como objetivo maximizar o minimizar el costo de esas decisiones (Ramos, 2010). Ha probado ser un método eficiente para determinar políticas óptimas de operación de sistemas de presas hidroeléctricas, en las que se concilia el propósito de maximizar la energía generada con el de minimizar las posibilidades de derrames o de déficit en el sistema. Así, en México se ha aplicado a los sistemas de presas del río Grijalva (Domínguez y Mendoza, 2000; Domínguez et al., 2001a; Arganis, 2004; Domínguez et al., 2006; Arganis y Domínguez, 2008; Domínguez y Arganis, 2009; Arganis et al., 2009), del río Fuerte (Domínguez et al., 2007), etcétera, y en países como Chile (Cámac et al., 1995), España (Ramos, 2010; Estalrich et al., 2000), Perú (CESEL, S.A., 2008), Colombia (Bedoya y Herrera, 2005), Brasil (Macedo y Franco, 2002), entre otros, se reportan aplicaciones exitosas de la PD a diversos sistemas hidroeléctricos. Sin embargo, se considera que la aplicación del método está limitada por lo que ha dado en llamarse "la maldición del número de estados", debido a que al crecer este número también lo hace el número de variables de decisión, el de barras del histograma de probabilidades de ingreso, etcétera, de tal forma que el número de cálculos se incrementa en una proporción exponencial. Para salvar esta limitante se han desarrollado diversas variantes de la PD, tales como la dinámica incremental (ID) (Larson, 1968), la estocástica (Bertsekas, 1976) y la discreta diferencial (DD) (Jacobson y Maine, 1970; Heidari et al., 1971); cabe destacar que la DD es una generalización de la ID (Nopmongcol y Askew, 1976), y ambas requieren que la función objetivo cumpla con ser diferenciable y las restricciones impuestas deben ser lineales.
En este trabajo se analiza un sistema de tres presas que funcionan en cascada; se requiere determinar políticas de operación que hagan óptimo su funcionamiento y se eligió la técnica de la programación dinámica en su versión estocástica para ello. El algoritmo se organizó de tal forma que se concilie la limitante del uso y demanda de los recursos computacionales.
Una restricción adicional impuesta a las políticas que aquí se determinaron fue considerar que se debe reducir a un mínimo la probabilidad de que el almacenamiento en las presas del sistema supere el correspondiente a una curva denominada "curva guía".
Para comprobar la bondad de las políticas obtenidas, además de la simulación de su funcionamiento con el registro histórico y con registros sintéticos, se compararon los resultados que se obtienen con dos posibles volúmenes de discretización, a fin de verificar si la solución ya no mejora al reducirlo.
Objetivo
Desarrollar un algoritmo que permita obtener y comparar el comportamiento de distintas políticas de operación quincenal obtenidas utilizando la programación dinámica en su versión estocástica para el sistema de embalses del río Santiago, compuesto por tres presas que operan en cascada: La Yesca, El Cajón y Aguamilpa, considerando tanto las necesidades asociadas a la generación de energía como las correspondientes al control de inundaciones.
Elaborar escenarios considerando diversas opciones de curva guía para los niveles en dichas presas.
Metodología
Ubicación del sitio
El río Santiago se localiza en el occidente de la república mexicana. Nace en el lago de Chapala, en el estado de Jalisco, a una altitud de 1 500 msnm, y sigue su trayecto por los estados de Jalisco y Nayarit. A lo largo de este río se han construido presas, cuyo principal propósito es la generación de energía eléctrica. El sistema está formado por las presas Santa Rosa, La Yesca (actualmente en construcción), El Cajón y Aguamilpa. En la figura 1 se ilustra una vista en planta de la forma en que están dispuestas estas presas y en la figura 2 un perfil.
En los cuadros 1,(2) a 3 se presentan algunas de las características físicas más relevantes de las presas.

Programación dinámica estocástica
La determinación de las políticas de operación de un sistema de presas que opera en cascada es complicada; está ligada con procesos de decisión secuencial que hacen necesario el uso de algoritmos de optimización para resolver el problema. El planteamiento de la función objetivo es trascendental, ya que debe conciliar, por una parte, los máximos beneficios por generación, y por la otra, establecer las penalizaciones por posibles condiciones de derrame o de déficit en el sistema. De manera adicional se debe considerar la naturaleza aleatoria de los volúmenes de ingreso a los embalses, incluyendo el grado de autocorrelación y de correlaciones cruzadas existentes en ellos.
En este estudio se dividió el año en N etapas; se consideraron los tres embalses divididos en cierto número de estados, NS, dependiendo de la capacidad útil de cada uno y proponiendo un incremento de volumen ΔV para hacer la discretización del problema. Las variables de decisión o control son las extracciones, k, las cuales pueden tomar, para cada etapa, desde un valor mínimo hasta un valor máximo, dependiendo del volumen máximo turbinable en cada embalse; las variables aleatorias son los escurrimientos por cuenca propia, x, a las que se definió por medio de sus funciones de densidad de probabilidad, para obtener el beneficio esperado, que forma a la función objetivo del problema; las restricciones en el modelo están dadas por la ecuación de continuidad: j = i + x - k; con los estados 1 ≤ i ≤ NS, las entradas 1 ≤ x ≤ nx; las extracciones: kmín ≤ k ≤ kmáx.
La función objetivo que se propuso consiste en la maximización del valor esperado del beneficio por generación, imponiendo penalizaciones en el caso de déficit, de derrame o bien de rebase de la curva guía propuesta para cada presa, quedando la siguiente expresión:

Siendo FO la función objetivo; NP, el número de presas (tres en este caso); ii, el subíndice para indicar la presa (ii = 1 es La Yesca; ii = 2, El Cajón; ii = 3, Aguamilpa); E(), el valor esperado; EG, la energía generada en cada presa; Cderr, Cdef y Ccg, los valores para los coeficientes de penalización por derrame, déficit y rebase de la curva guía en cada presa, respectivamente; Derr, la magnitud del derrame, y Def, la del déficit.
Desarrollo del algoritmo y forma propuesta para resolverlo
La política óptima se obtiene usando las siguientes ecuaciones recursivas del método de la PD en su versión estocástica:
y:

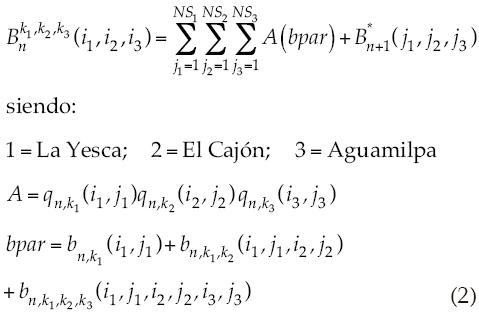
Donde 1, 2 o 3 es el subíndice que identifica la presa (La Yesca (1), El Cajón (2) o Aguamilpa (3)); A, el producto de las probabilidades de transición, qn,ki (ii ji) i = 1, 3 en la etapa n, dadas las extracciones k1, k2, k3, y los estados iniciales, i, y finales, j, de cada presa; bpar, la suma del beneficio en la etapa, n, dados los estados inicial, i1, i2, i3, y final j1, j2, j3 y sus respectivas extracciones k1, k2, k3; (i1, i2, i3), el beneficio esperado hasta la etapa n en cada uno de los estados i1, i2, i3, dadas las extracciones k1, k2, k3; B*n+1(j1, j2, j3) , el valor esperado óptimo correspondiente a la extracción óptima k* en la etapa n + 1.
(i1, i2, i3), el beneficio esperado hasta la etapa n en cada uno de los estados i1, i2, i3, dadas las extracciones k1, k2, k3; B*n+1(j1, j2, j3) , el valor esperado óptimo correspondiente a la extracción óptima k* en la etapa n + 1.
Para minimizar el número de cálculos, la ecuación (2) se reorganizó como:

donde:

Para resolver las ecuaciones (3), (4) y (5), el algoritmo de optimización se dividió en dos partes, para evitar realizar cálculos repetitivos; en la primera sólo se calcula el valor esperado del beneficio para cada etapa usando la ecuación (5), que se repite de un año a otro, y que considera a la función objetivo. Luego, en la segunda parte, se supone un valor grande N (que puede corresponder a la vida útil del sistema); el proceso de cálculo inicia hacia atrás, esto es, con la última etapa del año, y en ella se suponen los beneficios máximos B* iguales a cero. Se aplica la ecuación (4) hasta que la diferencia entre la suma de los incrementos de los beneficios entre dos años consecutivos cumpla con una tolerancia dada que, para fines de garantizar convergencia de la solución, se supondrá pequeña (10-5 en este caso). Una vez que el proceso converge, se guarda para cada presa y para cada etapa la extracción óptima k* y el beneficio total máximo B*.
Datos de entrada
Se propuso inicialmente un ΔV = 200 millones de m3, con lo que la capacidad útil de cada presa quedó dividida en ocho estados para La Yesca, siete para El Cajón y 13 para Aguamilpa. Y en un intento por hacer más fina la discretización del volumen útil, se consideró un ∆V = 150 millones de m3, lo que resultó en 10, 9 y 18 estados para La Yesca, El Cajón y Aguamilpa, respectivamente.
El año se consideró dividido en ocho etapas agrupadas en los siguientes meses: etapa uno: noviembre; etapa dos: octubre; etapa tres: septiembre; etapa cuatro: agosto; etapa cinco: julio; etapa seis: junio; etapa siete: febrero-marzo-abril-mayo; etapa ocho: diciembre-enero.
Se determinó la probabilidad de los volúmenes ingreso para cada una de las etapas, a partir de los valores históricos registrados en el periodo común de 1981 a 2008. Para las curvas guía de El Cajón y Aguamilpa se utilizaron las elevaciones máximas históricas quincenales. Para La Yesca se propuso una curva guía similar a la de El Cajón, aumentándole un estado, pero sin sobrepasar su nivel de aguas máximo extraordinario (NAME). Las figuras 3, 4 y 5 muestran la curva guía para cada presa.
La curva elevaciones capacidades de cada presa, considerando volúmenes a cada ΔV y la elevación con origen en el nivel de aguas mínimo ordinario (NAMINO), se representó como una ecuación polinomial de segundo orden. Así se tiene que:
Para la Yesca:

Para El Cajón:

Para Aguamilpa:

Durante el proceso de optimización se consideraron diversos valores para penalizar los eventos no deseados en el sistema, que son presencia de derrames, de déficits y de rebases de las curvas guía. Se hicieron varios ensayos, para cada uno de ellos se obtenía la política y con ella se simulaba el funcionamiento del sistema.
Para las simulaciones se consideraron los volúmenes quincenales de escurrimiento por cuenca propia de las presas La Yesca, El Cajón y Aguamilpa (en los cuadros 4a y 4b se presentan, a manera de resumen, los volúmenes mensuales de ingreso considerados para cada presa). Además, para calcular el volumen de evaporación, se utilizó el promedio mensual de los valores de la lámina de evaporación neta (cuadro 5). También se consideran datos físicos de las presas, como capacidad útil, capacidad muerta, capacidad total, nivel de desfogue, elevación al NAMINO, volumen máximo turbinable, factor de eficiencia, curvas elevaciones-capacidades-áreas, etcétera.
Para simular el sistema con un registro mayor que el histórico se generaron diez series sintéticas de cien años cada una, usando el método de Svanidze modificado (Svanidze, 1980; Domínguez et al., 2001b; Domínguez et al., 2002).
Resultados y discusión
Se hicieron diversas combinaciones de valores de coeficientes de penalización para los casos de déficit, derrame y rebase de la curva guía para los dos valores de discretización del volumen útil considerados. Para castigar el derrame se consideraron valores de 10 000 y de 100 000; para el déficit, de 100, 1 000 y 10 000, y para el rebase de la curva guía, de 1 000. Se hicieron combinaciones de estos valores y con cada política que se obtuvo se simuló el funcionamiento en forma quincenal del sistema. Al analizar el conjunto de resultados obtenidos se seleccionaron las políticas que mejor desempeño tuvieron (maximizar generación de energía y minimizar los derrames, déficits y rebases de la curva guía). En el cuadro 6 se muestra un resumen de los resultados que se obtuvieron al simularlas usando el registro histórico.
De un total de 21 políticas analizadas, las de mejor desempeño resultaron la 4, 12, 20 y 21; en todas ellas, los coeficientes de penalización fueron los mostrados en el cuadro 7 para la política 4.
Se incluyó también en el cuadro 6 la política 9, que resulta al imponer las penalizaciones indicadas en el cuadro 7, para mostrar cómo cambian los resultados al modificar las penalizaciones. Así, al comparar los resultados de las políticas 4 y 9, se observa que al aumentar la penalización por derrame y disminuir la de déficit en la presa 1, y aumentar la de derrame en las presas 2 y 3, la energía total generada disminuye muy ligeramente, mientras que el derrame total en el sistema disminuye un 30%, pero el déficit se incrementa exageradamente, a niveles que la CFE consideró inaceptables, por lo que la política 9 se descartó para los análisis posteriores.
Las políticas 4 y 9 se determinaron usando una discretización de la capacidad útil de las presas de 200 millones de m3 y la 12 con un ΔV de 150 millones de m3. Las políticas 20 y 21 corresponden a las discretizaciones de la 4 y la 12, respectivamente, pero en ambas se limitó la curva guía de la presa Aguamilpa de manera que no sobrepasara su NAMO en ninguna quincena.
De acuerdo con los resultados del cuadro 6, la reducción en el tamaño de la discretización no conduce a cambios cualitativos en los resultados. Con la política 4 se presenta un derrame total cercano a los 12 000 millones de m3, mientras que con la 12 resultan poco más de 13 000 millones de m3; en cambio, con la política 4, se presenta un déficit mayor que con la 12. De aquí se puede concluir que si lo que se pretende es controlar déficits pagando con presencia de derrames, la política 12 es mejor que la 4; sin embargo, si es lo contrario, la política 4 derrama mil millones menos que la 12, aunque no puede evitar que las presas de La Yesca y Aguamilpa lleguen a su nivel mínimo y presenten déficit.
Al limitar la curva guía de la presa Agua-milpa con el NAMO, se observan cambios en la política 20 (respecto a la 4); como era de esperarse, la política 20 controla mejor los derrames, pero paga el precio con un incremento en el déficit en las tres presas. La política 21 se mantiene sin cambio respecto a la 12. Se podría decir con esto que el limitar la curva guía de la presa Aguamilpa no representa un cambio significativo en los resultados; sin embargo, el hecho de que se limite la curva guía al nivel del NAMO es más congruente con las condiciones del diseño original del embalse y hace más seguro el funcionamiento de la obra de excedencias.
Respecto a la generación de energía promedio anual, con objeto de tener un parámetro cualitativo de comparación, se utilizó la estimación reportada por la CFE (CFE, 2010), que para El Cajón es de 1 228 GWh, mientras que las simulaciones con las políticas 4 y 12 reportan 1 102 y 1 143 GWh, respectivamente; es decir, que se tiene una diferencia de 126 GWh con la política 4, la que se reduce a 85 GWh con la política 12. Para la presa de Aguamilpa, la generación media anual estimada por la CFE es de 2 133 GWh y los resultados que alcanzan las dos mejores políticas (la 4 y la 12) es de 2 021 y 2 045 GWh, lo que da una diferencia de 112 y 88 GWh, respectivamente. La comparación con las estimaciones de la CFE es sólo cualitativa debido a que en la referencia utilizada no se indican los datos de escurrimiento y evaporación ni la eficiencia de generación que utilizaron.
Usando el registro histórico (28 años) para simular el sistema, en la figura 6 se muestra que con la política 20, en La Yesca casi cada cinco años ocurren derrames, cada nueve años en El Cajón y casi cada seis años en Aguamilpa. La política 21 disminuye la frecuencia de derrames en la primera presa a casi cada seis años; la mantiene igual en El Cajón (casi cada nueve años), y en Aguamilpa la incrementa un poco, casi cada cinco años. De la misma figura 6 se tiene que la ocurrencia de déficit para la política 20 es de cada nueve años para La Yesca, no se presentan en El Cajón y ocurren cada 28 años en Aguamilpa. La política 21 logra que en El Cajón y Aguamilpa no se tengan déficits, y que cada 28 años se presente el evento en La Yesca. Los rebases de la curva guía para la política 20 se presentan en promedio casi cada cinco años en La Yesca y cada 3.5 y 4 años en El Cajón y Aguamilpa, respectivamente. Con la política 21, La Yesca se mantiene sin cambio, pero El Cajón y Aguamilpa presentan ahora prácticamente cada dos años rebase de los límites de la curva guía.
Para tener un periodo más confiable de simulación del sistema, que aporte mayor detalle respecto a los posibles eventos extremos (situaciones de derrames y déficits), se generaron diez series sintéticas de cien años cada una, y se hizo con ellas la simulación de las políticas 20 y 21. Al comparar los resultados de las simulaciones con la política 20 (cuadro 8) con los de la política 21 (cuadro 9), se tendría con la primera un derrame promedio de 35 213.5 millones de m3 en cien años para la suma de las tres presas, contra 39 865.2 millones de m3, para la política 21; esto es, un 13% de aumento en la magnitud del derrame. En el caso del déficit, el promedio en el sistema sería de 10 258.3 millones de m3 en cien años con la política 20, contra los 1 100.1 millones de m3 de la 21; en este caso, el déficit disminuiría en cerca del 90%; es decir, con la política 21 se tendría un déficit mucho menor en el sistema. Es interesante resaltar que estos resultados son congruentes con los obtenidos para el registro histórico, lo que confirma la validez de las secuencias generadas.
Las curvas guía diseñadas se rebasan en varias ocasiones durante la simulación del funcionamiento del sistema con ambas políticas. La figura 7 muestra el promedio en los cien años de las diez series sintéticas generadas.
Se puede apreciar que la política 20 tiene un mejor control sobre este evento que la política 21; con la primera se rebasa la curva guía en La Yesca cada 1.7 años, 2.6 años en El Cajón y casi cada, 1.4 años, en Aguamilpa; mientras que con la política 21, en La Yesca, cada 1.6 años se rebasa la curva guía; cada 3.4 años en El Cajón, y casi cada cinco años en Aguamilpa.
En cuanto a generación de energía, con la política 20, las dos presas (El Cajón y Aguamilpa) generan menos que el valor estimado por la CFE; a la primera le falta aproximadamente un 17% y a la segunda un 11%. La política 21 tiene un mejor desempeño respecto a la generación de energía, pero tampoco alcanza los valores históricos estimados por la CFE, se queda con un faltante de 11% para El Cajón y un 8.6% para Aguamilpa.
De acuerdo con los cuadros 6, 8 y 9, la discretización en más estados, esto es, pasar de un ΔV de 200 a uno de 150 millones de m3, conduce a resultados más precisos, pero cualitativamente similares; sin embargo, en los recursos computacionales usados existen diferencias marcadas, principalmente en los tamaños de los arreglos —mismos que condicionan al compilador al momento de crear el programa ejecutable— y en el tiempo de ejecución de los programas de cómputo empleados, que pasó de dos minutos (120 s) para el ΔV de 200 millones de m3 a 10 minutos (600 s) para la discretización más fina de 150 millones de m3; es decir, que al disminuir en un 25% el tamaño de la discretización, el tiempo de ejecución se multiplicó por cinco. Debido a ello, no se consideró necesario usar intervalos de discretización menores.
Conclusiones
Se logró desarrollar un algoritmo para resolver el sistema de ecuaciones resultante de la aplicación de la programación dinámica estocástica para un sistema de tres presas en cascada que funcionara con éxito, a pesar del gran número de estados que implica (el número de estados necesarios para caracterizar el sistema es igual al producto de los estados correspondiente a cada presa). Con el algoritmo desarrollado se determinaron políticas de operación de un sistema de presas ubicado en el río Santiago, con la propuesta de dos incrementos de volumen (ΔV = 200 y ΔV = 150 millones de m3) para dividir la capacidad útil de las presas y considerando curvas guía obtenidas a partir de la operación histórica.
Las políticas de operación obtenidas concilian el objetivo de la generación de energía con el de evitar derrames o déficit, tomando en cuenta el efecto de las curvas guía.
En este estudio, el tiempo de cómputo empleado no era un factor muy importante a considerar; se le dio más peso a que el algoritmo propuesto usara en forma óptima la estructura misma de la programación dinámica, al dividir el problema en subproblemas más pequeños, resolverlos usando la recursividad y usar las soluciones para obtener, por el mismo principio del método, una solución óptima al problema completo.
En el cuadro 10 se presenta el ejemplo de la política de operación 4, para la etapa de noviembre, en la que se indica que (por razones de espacio, en el cuadro sólo se muestran los primeros tres estados) si la presa uno está en el estado 01, la presa dos está en el estado 5 (renglón 5) y la presa tres está en el estado 6 (columna 6); la política indica extraer 010201, que significa extraer en la quincena un volumen 01 x 100 = 100 millones de m3 de la presa La Yesca, 02 x 100 = 200 millones de m3 de la presa El Cajón y 01 x 100 = 100 millones de m3, de la presa Aguamilpa.
Agradecimientos
Se agradece la colaboración de Francisco Peña Delgado en la determinación de los registros sintéticos utilizados en este estudio.
Referencias
ARGANIS, M.L. Operación óptima de un sistema de presas en cascada para generación hidroeléctrica, tomando en cuenta condiciones reales de operación y el uso de muestras sintéticas para el pronóstico. Tesis de doctorado. México, D.F.: Universidad Nacional Autónoma de México, 2004. [ Links ]
ARGANIS, M.L. and DOMÍNGUEZ, R. Hydropower system management considering the minimum outflow. American Journal of Environmental Sciences. Vol. 4, No. 3, 2008, pp. 164-170. [ Links ]
ARGANIS, M.L., DOMÍNGUEZ, R., GONZÁLEZ, F., MENDOZA, R., CARRIZOSA, E., ALEGRÍA, A. y PEÑA, F. Estudio Integral de la Cuenca Alta del Río Grijalva. 3. Manejo óptimo de las presas. Proyecto 9318 elaborado para Comisión Federal de Electricidad (CFE). Informe final. (noviembre). México, D.F.: Comisión Federal de Electricidad, 2009. [ Links ]
BEDOYA, C. y HERRERA, M. Programación dinámica estocástica aplicada al problema del despacho hidrotérmico. Redalyc, Sistema de Información Científica. Vol. XI, núm. 28, octubre-sin mes. Universidad Tecnológica de Pereira (UTP), Colombia, 2005, pp. 53-58. [ Links ]
BELLMAN, E. Dynamic Programming. Princeton: Princeton University Press, 1957, 366 pp. [ Links ]
BERTSEKAS, P. Dynamic Programming and Stochastic Control. New York: Academic Press, 1976. [ Links ]
CÁMAC, D., RUDNICK, H. y CONTESSE, L. Operación óptima de sistemas eléctricos multiembalse, parte 2: programación dinámica dual determinística en el despacho hidrotérmico. XII CONIMERA, Lima, Perú, 1995, pp. 21-25. [ Links ]
CESEL, S.A. Estudio de plan de manejo ambiental de las operaciones de embalse y desembalse del lago Chinchaycoha. Lima: CESEL, S.A., 2008. [ Links ]
CFE. Yesca. Información Básica. Sistema Hidroeléctrico Santiago [en línea], 2010. Disponible para World Wide Web: http://www.cfe.gob.mx/yesca/es/InformacionBasica/Paginas/Sistema.aspx. [ Links ]
DOMÍNGUEZ, R. y MENDOZA, R. Funcionamiento de las presas Angostura, Chicoasén, Malpaso y Peñitas sobre el río Grijalva. Comisión Nacional del Agua (CONAGUA). Informe final. México, D.F.: Instituto de Ingeniería, UNAM, 2000. [ Links ]
DOMÍNGUEZ, R., MENDOZA, R. y ARGANIS, M.L. Revisión de las Políticas de Operación Quincenal de las Presas Angostura y Malpaso, en el Río Grijalva. Comisión Federal de Electricidad (CFE). Informe final. México, D.F.: Instituto de Ingeniería, UNAM, 2001a. [ Links ]
DOMÍNGUEZ, R., FUENTES, G. y ARGANIS, M.L. Procedimiento para Generar Muestras Sintéticas de Series Periódicas Mensuales a través del Método de Svanidze Modificado Aplicado a los Datos de las Presas La Angostura y Malpaso. Series Instituto de Ingeniería C1-19. México, D.F.: Instituto de Ingeniería, UNAM, 2001b. [ Links ]
DOMÍNGUEZ, R., FUENTES, G. y ARGANIS, M.L. Generación de muestras sintéticas de volúmenes de escurrimiento mensual de las presas La Angostura y Malpaso, Chiapas, utilizando el Método de Svanidze Modificado. XX Congreso Latinoamericano de Hidráulica, La Habana, Cuba, 2002, pp. 1-7. [ Links ]
DOMÍNGUEZ, R., ARGANIS, M.L., CARRIZOSA, E., FUENTES, G. y ECHEVERRI, C. Determinación de avenidas de diseño y ajuste de los parámetros del modelo de optimización de las Políticas de Operación del Sistema de Presas del Río Grijalva. Comisión Federal de Electricidad (CFE). Informe final. México, D.F.: Instituto de Ingeniería, UNAM, 2006. [ Links ]
DOMÍNGUEZ, R., ARGANIS, M.L., CARRIZOSA, E., DE LUNA, F., ESQUIVEL, G. y MENDOZA, A. Determinación de Políticas de Operación del Río Fuerte. Comisión Federal de Electricidad (CFE). Informe final. México, D.F.: Instituto de Ingeniería, UNAM, 2007. [ Links ]
DOMÍNGUEZ, R. y ARGANIS, M.L. Operating rules of Grijalva river dams in Mexico. Memorias del 33 rd IAHR Congress Water Engineering for a Sustainable Environment. Vancouver, British Columbia, 2009, pp. 1-8. [ Links ]
DORMIDO, S., DE MADRID, P. y SÁNCHEZ, J. Aplicación de la programación dinámica paralela al control del pH. XIII Actas de las Jornadas. Jornadas de Paralelismo, Lleida, España, 2002, pp. 135-140. [ Links ]
ESTALRICH, J. y TRILLA, J. Mejoras en el cálculo de la fiabilidad de la operación de una presa. Ingeniería hidráulica en México. Vol. XV, núm. 1, enero-abril de 2000, pp. 5-12. [ Links ]
HEIDARI, M., CHOW, V.T., KOKOTOVIC, P.V., and MEREDITH, D.D. Discrete differential dynamic programming approach to water resources system optimizations. Water Resources Research. Vol. 7, No. 2, 1971, pp. 273-282. [ Links ]
JACOBSON, D. and MAYNE, D. Differential Dynamic Programming. New York: Elsevier, 1970. [ Links ]
LARSON. E. State Increment Dynamic Programming. New York: Elsevier, 1968. [ Links ]
MACEDO, B. y FRANCO, P. Estudios sobre el comportamiento óptimo del almacenamiento de energía en embalses de sistema hidroeléctrico. Ingeniería hidráulica en México. Vol. XVII, núm. 3, julio-septiembre de 2002, pp. 17-26. [ Links ]
NOPMONGCOL, P. and ASKEW, A.J. Multi-level incremental dynamic programming. Water Resources Research. Vol. 12, No. 6, 1976, pp. 1286-1290. [ Links ]
RAMOS, A. Programación Dinámica. Documento Técnico. Universidad Pontificia Comillas, 2010, España [en línea]. Disponible para World Wide Web: http://www.doi.icai.upcomillas.es/simio/transpa/t_dp_ar.pdf [ Links ]
SVANIDZE, G. Mathematical Modeling of Hydrologic Series. Fort Collins: Water Resources Publications, 1980. [ Links ]

