










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Similars in
SciELO
Similars in
SciELO
Share

 Permalink
PermalinkTecnología y ciencias del agua
On-line version ISSN 2007-2422
Tecnol. cienc. agua vol.1 n.3 Jiutepec Jul./Sep. 2010
Artículos técnicos
Probando transductores de presión sumergibles para monitorear el nivel del agua en tanques
Testing submersible pressure transducers to monitor water level in tanks
Serge Tamari, Ariosto Aguilar-Chávez
Instituto Mexicano de Tecnología del Agua.
Dirección institucional de los autores
Dr. Serge Tamari
Dr. Ariosto Aguilar-Chávez
Instituto Mexicano de Tecnología del Agua
Paseo Cuauhnáhuac 8532, col. Progreso
62550 Jiutepec, Morelos, México
teléfono: +52 (777) 3293 600
tamari@tlaloc.imta.mx
aaguilar@tlaloc.imta.mx
Recibido: 15/07/08
Aprobado: 09/03/10
Resumen
A menudo se desea monitorear el tirante en cuerpos de agua con una incertidumbre menor a ± 5 mm. En este contexto, el objetivo del presente trabajo ha sido probar dos modelos de transductores de presión sumergibles de "nueva generación", es decir: instrumentos que cuentan con un sensor de temperatura integrado y un datalogger que corrige automáticamente el efecto de la temperatura sobre la respuesta del sensor de presión. Los resultados experimentales y unas consideraciones teóricas sugieren que con estos transductores se puede monitorear durante semanas el tirante en tanques de agua potable, con una incertidumbre entre ± 5 y ± 7 mm [p = 0.95], mientras el tirante es menor a 5 m y la temperatura del agua permanece en un rango de ± 5 oC. En forma indirecta se muestra que no sería tan fácil monitorear el tirante en otros cuerpos de agua (lagos, ríos, canales, embalses de presas y mar), con una incertidumbre de ± 5 mm [p = 0.95].
Palabras clave: tirante, monitoreo automático en un tanque, sensor de presión, densidad del agua, efectos térmicos, adquisición de datos.
Abstract
It is often desirable to monitor the water level in water bodies with an uncertainty smaller than ± 5 mm. In this context, the goal of this work was to test two models of a "new generation" of submersible pressure-transducers, i.e. instruments with an integrated temperature sensor and a datalogger that automatically corrects the effect of temperature on the pressure-transducer output. The experimental results and some theoretical considerations suggest that these transducers can be used to monitor the water level in drinking water tanks for weeks with an uncertainty between ± 5 and ± 7 mm [p = 0.95], provided that the water level is smaller than 5 m, and that the water temperature remains within a range of ± 5 °C. This work indirectly shows that it would not be so easy to monitor the water level in others water bodies (lakes, rivers, canals, dam embankments and the sea) with an uncertainty of ± 5 mm [p = 0.95].
Keywords: water level, Automatic Tank Gauging (ATG), pressure sensor, water density, temperature effect, data logger.
Introducción
A menudo se desea monitorear el tirante en cuerpos de agua (ISO, 1995a, página 1; Freeman et al., 2004, página 16; IOC, 2006, página 52) o el nivel de otros líquidos en tanques de almacenamiento (OIML, 2008, página 13), con una incertidumbre menor a = ± 5 mm [p = 0.95] (los términos en cursiva se definen en el glosario al final de este documento). Sin embargo, la literatura (ISO, 1995a; ITRC, 2004; Freeman et al., 2004; IOC, 2006) y nuestra propia experiencia indican que no es tan fácil alcanzar este objetivo con transductores expuestos a condiciones de campo, es decir, cuando se tienen cambios de temperatura mayores a ± 5 oC y cuando se pretende realizar mediciones durante semanas.
En comparación con las otras tecnologías que actualmente se utilizan para monitorear el nivel del agua (transductor de presión con sistema de burbujeo, transductores ultrasónicos de nivel, radares, flotador con transductor de desplazamiento, boya con GPS, LIDAR), debe reconocerse que los transductores de presión sumergibles tienen una desventaja: pueden tener problemas de funcionamiento cuando se dejan por mucho tiempo dentro del agua, debido a la corrosión, incrustación o taponamiento de su membrana. Sin embargo, estos transductores tienen también ventajas: sus fundamentos teóricos y modo de operación son bastante sencillos; pueden instalarse en sitios difíciles de acceso para otros instrumentos (por ejemplo, en embalses con un talud inclinado o en tanques con una abertura estrecha); son expuestos a cambios de temperatura menos fuertes que los instrumentos que se dejan fuera del agua, y son relativamente económicos (Freeman et al., 2004; ITRC, 2004; IOC, 2006).
Ahora bien, cuando se pretende utilizar transductores de presión comerciales para hacer mediciones precisas en condiciones de campo resulta comúnmente necesario tomar en cuenta la sensibilidad propia de estos instrumentos a la temperatura (ISO, 1995a, página 14; Freeman et al., 2004, página 24; Tamari et al., 2005; IOC, 2006, página 15). En este contexto, en los últimos diez años ha salido en el mercado una "nueva generación" de transductores de presión sumergibles, que cuentan con un microprocesador y un sensor de temperatura acoplado al sensor de presión; con este arreglo se pueden suministrar transductores calibrados de tal forma que corrigen automáticamente el efecto de la temperatura sobre la respuesta del sensor de presión. Además, estos nuevos instrumentos son atractivos para su uso en el campo, porque son compactos y de fácil manejo; en particular, cuentan con un datalogger integrado y no requieren de una alimentación eléctrica externa. Por lo anterior, el objetivo de este trabajo ha sido probar dos modelos de transductores de presión sumergibles de "nueva generación". El alcance es el monitoreo del tirante en tanques de agua potable, considerando una escala de medición de hasta 5 m y un periodo de algunas semanas (al respecto, véase Tamari y Alcocer-Yamanaka, 2010).
Consideraciones preliminares
Teoría sobre el uso de un transductor de presión sumergible
Para monitorear el tirante con transductores de presión sumergibles se utilizan generalmente sensores de tipo manométrico, es decir: con una membrana sensible cuya respuesta (σ) depende de la diferencia de presión entre un lado que está en contacto con el agua (presión Pm) y el otro en contacto con la atmósfera (presión Pvatm); el contacto con la atmósfera se logra por medio de un tubo venteado. Asumiendo el equilibrio hidrostático (lo cual es generalmente cierto, inclusive cuando el agua fluye; véase: French, 1988, página 45), la presión del agua (Pm) a una cierta profundidad (hm) es Pm = Poatm + ρw g hm, donde Poatm es la presión atmosférica que se ejerce sobre la superficie del agua, ρw es la densidad del agua (kg/m3) y g es la aceleración de la gravedad (m/s2). Asumiendo que ρw y g son constantes para el sitio donde se hacen las mediciones (ver Anexo 1), y asumiendo que Pvatm= Poatm (ver Anexo 2), el sensor de presión mide la siguiente cantidad: σ = ρw g hm. Ahora bien, y tal como se indica en la figura 1, el tirante en un tanque (h) es igual a la suma de dos cantidades: la altura de la columna de agua por encima del sensor de presión (hm) y la distancia entre el sensor y el fondo del tanque (ho). Se deduce la relación fundamental para estimar el tirante a partir de un sensor de presión manométrico y sumergible:


donde γ = ρw g. Entonces, se puede determinar el tirante en un tanque (h, m) a partir de la medición proporcionada por el sensor de presión (σ, Pa), siempre y cuando se conozcan dos parámetros: la distancia entre el sensor y el fondo del tanque (ho, m), y un coeficiente (γ, Pa/m). Considerando la dificultad práctica para determinar geométricamente el valor de ho y los múltiples factores que influyen en el valor de γ, es aconsejable determinar ho y γ mediante una calibración en sitio; después, se puede asumir que el coeficiente y es una constante característica del sitio donde se están haciendo las mediciones. Ahora bien, en hidráulica se expresa comúnmente la presión en "metros de columna de agua" (mca); en este caso, se tiene:

donde τ es la presión medida (expresada en mca) y κ (mca/m) es un coeficiente igual a κ = γ/γre/ (γref siendo la constante elegida para convertir los Pa en mca). Este cambio de unidad simplemente tiene un interés práctico; de hecho, el valor de k está cerca de uno.
Interpretación de los datos de incertidumbre reportados por los fabricantes
Para elegir adecuadamente un transductor de presión sumergible (Cuscó et al., 1998; Freeman et al., 2004) deben considerarse varios factores relacionados con el sensor de presión (tamaño, facilidad de purgarlo con agua, accesorio para evitar condensaciones en el tubo venteado, posibilidad de dejar el sensor inclinado o acostado, materiales usados para las partes sumergidas, resistencia a las descargas electroestáticas, etcétera) y el datalogger (autonomía de la batería, tamaño de la memoria no volátil, forma de programar el datalogger, incertidumbre del reloj, etcétera). También es importante considerar la escala de medición e incertidumbre del transductor.
Por lo general, se especifica la incertidumbre de un transductor de presión en términos relativos, es decir, como siendo una proporción de su escala de medición ("EM"). Por ejemplo, un transductor con una incertidumbre relativa: εr = 0.1% EM y una escala de medición equivalente a 5 mca tiene una incertidumbre (absoluta): ε = 5 mmca. Al respecto, debe tenerse un especial cuidado en cuanto a las indicaciones de ciertos fabricantes (Cuscó et al., 1998, página 42; Freeman et al., 2004, página 13). De hecho, el valor reportado de "e." puede referirse a un intervalo bilateral, y en este caso, la incertidumbre del transductor es "± εr", es decir, el doble de lo que parece. Además, varios fabricantes no indican con qué intervalo de confianza expresan la incertidumbre "e." de sus instrumentos; en este caso se recomienda (ISO, 1995b) considerar que el valor reportado es la incertidumbre estándar [p = 0.68], por lo cual se deduce que la incertidumbre expandida [p = 0.95] del instrumento es "2 εr". Esta situación se complica aún más por los motivos que se exponen a continuación.
En la práctica, lo que interesa al usuario es conocer la incertidumbre expandida de un transductor de presión cuando trabaja bajo ciertas condiciones de uso (es decir, para un cierto rango de presión y de temperatura, durante un cierto tiempo, etcétera). Sin embargo, los fabricantes generalmente no entregan directamente este tipo de información. Por lo general, proporcionan un conjunto de valores que el usuario puede combinar (ISO, 1995b) para estimar la incertidumbre que le interesa; dichos valores son los siguientes: (a) no-linealidad e histéresis (la incertidumbre debido a que la respuesta del sensor en función de la presión no es perfectamente lineal); (b) sensibilidad a la temperatura (la incertidumbre causada por cambios de temperatura); (c) sensibilidad a otros factores (por ejemplo, las vibraciones); (d) estabilidad a largo plazo (la incertidumbre causada por el envejecimiento del sensor), y (e) incertidumbre del datalogger (la incertidumbre causada por la conversión de la señal eléctrica de salida del transductor en un valor numérico). Pero con esta información no es tan fácil estimar cuál será la incertidumbre de un transductor para una cierta aplicación (Cuscó et al., 1998; Freeman et al., 2004). En este contexto, algunos fabricantes reportan la incertidumbre de sus instrumentos en términos de banda de error total (o "TEB", por sus siglas en inglés); para el usuario, esta información es a priori más simple de entender, porque incluye por lo menos los efectos combinados de no-linealidad, histéresis y sensibilidad a la temperatura. Desafortunadamente, en este caso, no todos los fabricantes dicen claramente lo que denominan "TEB" (Cuscó et al., 1998, página 43). Por todas las dudas anteriores, es aconsejable realizar pruebas para verificar la incertidumbre de los transductores bajo ciertas condiciones de uso (Cuscó et al., 1998, página 42; Freeman et al., 2004, página 16; ITRC, 2004).
Incertidumbre teórica de las estimaciones de tirante
Finalmente, debe quedar claro que el tirante no se "mide" con un transductor de presión, sino que se "estima" a partir de una medición de la presión del agua (véase ecuación (1b)); esta estimación es otra causa de incertidumbre, que se suma a la incertidumbre del propio transductor. Combinando las incertidumbres según lo conocido como "ley de propagación de incertidumbre" (ISO, 1995b), se deduce que la incertidumbre sobre el tirante es dada por la siguiente relación:

donde el símbolo ε(.) representa la incertidumbre de los términos (h0, τ y κ) y τEM es la escala de medición del transductor usado (mca). En este trabajo se consideran los siguientes valores [p = 0.95]: ε(h0) = ± 1.5 mm (algo realista, cuando se calibra y se sujeta adecuadamente un transductor de presión) y ε(κ)/κ ≈ ± 0.08% (para agua potable expuesta a cambios de temperatura no mayores a ± 5 oC; véase Anexo 1). Considerando también que el tirante h puede tomar cualquier valor entre 0 y 5 m, se encuentra que la incertidumbre [p = 0.95] sobre la estimación del tirante e(h) será comprendida entre ± 3 y 5 mm si se logra medir la presión con una incertidumbre ε(T)/ τEM = ± 0.04% (algo muy preciso en la práctica), y entre ± 5 y 7 mm si se mide la presión con una incertidumbre ε(τ)/τEM = ± 0.1% (valor reportado por los fabricantes de los transductores probados). Este cálculo teórico —para una escala de medición relativamente pequeña y condiciones de campo bastante estables— muestra que en la actualidad no es tan fácil alcanzar el objetivo de incertidumbre mencionado al inicio de este trabajo.
Materiales y métodos
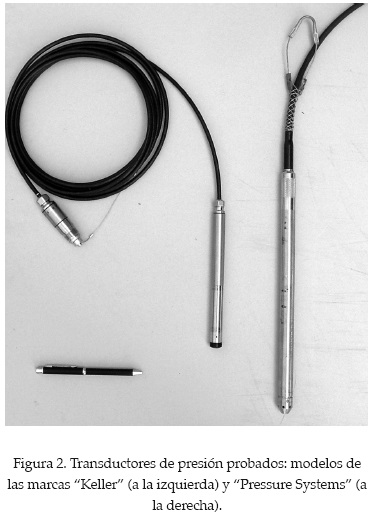
Se presentan resultados obtenidos con dos modelos de transductores (figura 2): "KPsi-551" de la marca Pressure Systems (Hampton, USA) y "DCX-16VG" de la marca Keller (Newport News, EU). Ambos instrumentos se parecen bastante. En particular, los fabricantes reportan una banda de error total de = ± 0.1% EM [p = 0.95]. Cada instrumento también tiene sus propias ventajas (cuadro 1): el transductor de la marca Pressure Systems viene con un sistema para evitar condensaciones en el tubo venteado que es a priori más confiable (ITRC, 2004, página 13; Freeman et al., 2004, página 28), tiene mayor capacidad para almacenar datos y registra el voltaje de su batería; mientras que el transductor de la marca Keller es más pequeño y probablemente más fácil de purgar.
Los fabricantes de los transductores probados (Keller, 2006; Pressure Systems, 2007) definen la banda de error total de sus instrumentos como la combinación de los efectos de no-linealidad, histéresis, sensibilidad a la temperatura (desde -10 hasta 40 oC), e incertidumbre del datalogger. Sin embargo, existen dudas al respecto: (a) no se dice a qué intervalo de confianza corresponde el valor reportado de la banda total de error, y (b) tampoco se dice claramente cuál es la estabilidad a largo plazo de los transductores. Inclusive, ambos fabricantes aclaran que ¡Se reservan el derecho de cambiar lo mencionado en las hojas de especificaciones de sus transductores! A continuación se reportan resultados obtenidos durante el periodo 2006 - 2008 con cinco transductores de la marca Pressure Systems y uno de la marca Keller (cuadro 2). Dichos resultados se relacionan con la incertidumbre de los instrumentos, cuando se pretende monitorear el tirante en tanques de agua potable.
Resultados y discusión
Pruebas de laboratorio a corto plazo
En forma preliminar se hicieron pruebas de laboratorio a corto plazo (< 60 min) para verificar el funcionamiento de los transductores de presión. Por comodidad se programaron los transductores de tal forma que expresan la presión medida en mca. Los principales resultados se reportan a continuación:
• Offset cuando el sensor de presión está orientado normalmente. Por un lado, no se ha detectado algún cambio temporal en la señal de salida de los transductores desde el momento en que empiezan a adquirir datos. Por otro lado, y a pesar de que los fabricantes aseguran que la incertidumbre de sus transductores es ≈ ± 5 mmca [p = 0.95] (para una escala de medición inferior a 5 mca), se encontró que el offset de los transductores no estaba siempre dentro de este rango, aun cuando el sensor de presión estaba orientado en su forma de uso normal, es decir, con la punta hacia abajo (por ejemplo, véase la figura 3, donde el offset es 12 mmca cuando el transductor está orientado hacia abajo).
• Offset cuando se cambia la orientación del sensor de presión. Tal y como se indica en el manual de usuario del transductor "KPsi 551", se observó que un cambio en la orientación de los transductores produce cambios en el offset de hasta 10 mmca (por ejemplo, véase figura 3). Esto puede explicarse por el efecto de la gravedad sobre la membrana de los sensores de presión.
• Linealidad e histéresis. Se hicieron varias pruebas de calibración en condiciones de laboratorio; para eso se utilizó principalmente un tanque de ≈ 2 m de alto, el cual se llenaba y después se vaciaba con agua de la llave por incrementos de = 0.1 m; durante cada prueba individual de calibración (duración menor a 60 minutos), la temperatura de los transductores se mantuvo en un rango de ± 1.5 oC. El tanque tenía paredes de vidrio, que permitían ver el nivel del agua y así medir el tirante con una regla (con una tolerancia de ± 1 mm). Los residuos de las calibraciones estuvieron casi siempre [p > 0.95] en un rango de ± 2 mmca (lo que corresponde a una linealidad de los transductores probados mejor a ± 0.07% EM [p = 0.95]). Además, las pendientes de las curvas de calibración obtenidas (cuadro 3) fueron consistentes con lo que se esperaba teóricamente (Anexo 3).
• Ruidos en la señal de salida de los transductores. En ocasiones se observó que la señal de salida de los transductores tenía un comportamiento raro, el cual se manifestaba por pequeños cambios abruptos de presión (menores a 2 mmca) y con una cierta periodicidad (por ejemplo, véase los datos del transductor KPsi # 601842 en la figura 4). No se tiene una explicación clara al respecto, pero esto se debe probablemente a inestabilidades en el funcionamiento de la alimentación eléctrica o del datalogger de los instrumentos.


En resumen, las pruebas a corto plazo mostraron que la linealidad de los transductores probados era consistente con las especificaciones de los fabricantes, es decir, menor a ± 0.1% EM [p = 0.95]. Además, las pendientes de las curvas de calibración fueron similares a lo que se esperaba teóricamente. Sin embargo, se observó que el offset de ciertos transductores está fuera del rango esperado y depende de la orientación del sensor de presión; esto no es un problema tan grave en la práctica, mientras se calibran los transductores en sitio. También se encontró que la señal de salida de algunos transductores se vuelve a veces ruidosa con una cierta periodicidad, pero este problema puede resolverse fácilmente mediante un suavizamiento o filtrado de los datos.
Pruebas de laboratorio a medio plazo
Después de las pruebas a corto plazo se hicieron otras en el laboratorio, para evaluar la sensibilidad de los transductores a la temperatura y su estabilidad a medio plazo (es decir, durante algunas semanas). Los principales resultados se reportan a continuación:
• Sensibilidad a la temperatura. Los transductores de presión son sensibles a la temperatura sobre todo, por cuestiones mecánicas; de hecho, un aumento de temperatura produce una dilatación del sensor, lo cual ocasiona una deformación más o menos importante de su membrana (ISO, 1995a, página 14). Si bien la sensibilidad a la temperatura de un transductor de presión es muy difícil de estimar teóricamente, se puede intentar tomarla en cuenta empíricamente en el proceso de calibración del transductor (Freeman et al., 2004, página 24; Tamari et al., 2005). En este sentido, los fabricantes de los transductores "KPsi-551" y "DCX-16VG" aseguran que sus instrumentos tienen compensación de temperatura, de tal forma que su incertidumbre es del orden de = ± 5 mmca [p = 0.95] para una escala de medición inferior a 5 mca y mientras la temperatura del transductor permanece entre -10 y 40 oC (lo cual es un rango bastante amplio en la práctica). Al respecto, se vio que algunos transductores son probablemente consistentes con esta especificación (por ejemplo, véase los datos del transductor KPsi # 601842 en la figura 4). Sin embargo, parece que no ha sido el caso de todos los transductores probados; de hecho, se encontró que el offset de algunos presentaba variaciones de hasta ± 5 mmca para cambios de temperatura de tan sólo ± 5 oC (por ejemplo, véase los datos de los transductores KPsi # 706221 y Keller # 0022 en la figura 4).
• Estabilidad con el tiempo. Los fabricantes de los transductores "KPsi-551" y "DCX-16VG" no proporcionan datos claros sobre la estabilidad de sus instrumentos después de un cierto periodo de tiempo. Al respecto, se obtuvieron algunos resultados en este trabajo. En el caso de un transductor poco sensible a la temperatura (KPsi # 601842, véase figura 4) que se utilizó en un laboratorio donde los cambios de temperatura a altura del instrumento eran pequeños (menores a ± 2 oC), se encontró que la curva de calibración del transductor no cambiaba significativamente a lo largo de dos meses de uso y que los residuos con respecto a esta curva eran casi siempre en un rango de ± 2 mmca [p = 0.95], lo que corresponde a una incertidumbre expandida de ± 0.07% EM (figura 5). En el caso de otro transductor (KPsi # 60741) que se dejó durante cuatro meses en un laboratorio donde la temperatura promedio (a escala del día) permaneció constante en un rango de = ± 1.5 oC, se observó que su offset no variaba de más de = 6 mmca por mes (figura 6), lo que corresponde a un cambio de 0.02% EM por mes (puesto que la escala de medición del transductor era 30 mca, es decir, seis veces más de los otros transductores probados).
Por un lado, se encontró que algunos transductores probados son probablemente más sensibles a la temperatura que lo especificado por sus fabricantes, aunque no se detectaron cambios en el offset mayor a = ± 0.1% EM [p = 0.95], mientras la temperatura permanece en un rango de ± 5 oC. Por otro lado, el resultado de dos pruebas de laboratorio sugiere que los transductores probados son bastante estables en la práctica, con cambios en su calibración menores a ± 0.01% EM por mes. Estos resultados sugieren lo siguiente: si se utilizan los transductores durante no más de dos meses en un ambiente donde los cambios de temperatura son menores a ± 5 oC, la incertidumbre de los transductores dependerá sobre todo de la temperatura y será de = ± 0.1% EM [p = 0.95].
Prueba de monitoreo en un tanque de agua
Después de las pruebas de laboratorio se hicieron pruebas de monitoreo de algunas semanas en tanques de agua potable ("tinacos"), donde los cambios de temperatura fueron de casi ± 5 oC. Se presentan los resultados de una de ellas a continuación: consistió en intercomparar tres transductores, para los cuales se esperaba tener estimaciones del tirante con una incertidumbre de = ± 5 mm [p = 0.95] (según cálculos basados en la ecuación (2)).
Para realizar la prueba se dejaron los transductores (Keller # 0022, KPsi # 601842 y KPsi # 706221) en un tinaco mediano (capacidad = 2.5 m3; diámetro interno = 1.58 m) durante 25 días (del 17 de marzo al 11 de abril de 2008). Antes de iniciar, se ajustaron sus offset para que fueran iguales a cero (con una tolerancia de ± 1 mmca), se ajustaron sus relojes al reloj de una PC (con una tolerancia de ± 30 s; también se utilizaron dos relojes digitales para verificar el de la PC) y se programaron los transductores para adquirir un dato por cada minuto. Luego se sumergieron los transductores en el agua (sacudiéndolos un poco para purgarlos, es decir, para que no quedaran burbujas de aire atrapadas en la punta) y finalmente se dejaron acostados en el fondo del tinaco. La temperatura del agua en el tinaco fue de 25 ± 4 oC.
• Verificación de la calibración de los transductores. Al inicio de la prueba se produjeron voluntariamente unos cambios de tirante en el tinaco y se verificó en ese momento que los tres transductores probados proporcionaban estimaciones de tirante consistentes con lo esperado (figura 7).
• Desarrollo de la prueba. Durante las dos primeras semanas, los datos de los transductores fueron consistentes, con diferencias en un rango de ± 2 mmca. Sin embargo, después de una semana empezaron a tenerse discrepancias cada vez más grandes (véase figura 8). Al respecto, se encontró al final de la prueba que el reloj de cada transductor estaba desfasado con respecto al reloj de la PC usada para recuperar los datos + 1 minuto para el transductor Keller # 0022, + 12 minutos para el transductor KPsi # 601842 y hasta -33.5 horas para el transductor KPsi # 706221.
• Problemas con la batería de los transductores. El importante retraso en el reloj del transductor KPsi # 706221 probablemente se debió a un problema de alimentación eléctrica de su datalogger, que empezó a ponerse de manifiesto a partir del día 18 de la prueba, cuando el voltaje de la batería alcanzó un valor menor a ≈ 1.88 V (véanse flechas en la figura 8). Si bien se indica en las especificaciones técnicas del transductor que este instrumento utiliza baterías con una capacidad de 3 V (cuadro 1), no se dice cuál es el voltaje mínimo de la batería para que el instrumento funcione adecuadamente (y al descargar los datos de su memoria no volátil no se recibió mensaje alguno de advertencia al respecto).
• Problemas con el reloj de los transductores. El reloj del transductor KPsi # 601842 no tuvo una discrepancia tan exagerada como la que se menciona en el inciso anterior; sin embargo, dicha discrepancia (+12 minutos después de 25 días) es bastante mayor a lo especificado por el fabricante (que reporta ± 4 minutos por año; véase cuadro 1), a pesar de que la batería del transductor era a priori bien cargada (véase figura 8). No se tiene una explicación al respecto, aunque un error de unos minutos por mes no es algo tan importante para muchas aplicaciones prácticas. Sin embargo, tal y como se muestra a continuación, pequeñas discrepancias en el reloj de un datalogger pueden volverse problemáticas cuando se pretenden comparar instrumentos de medición.
• Necesidad de contar con un reloj preciso para poder comparar diversos transductores. Para la prueba realizada se obtienen grandes diferencias de hasta ≈ 30 mm (véase la gráfica de arriba en la figura 9) si se intenta calcular la diferencia entre los datos de los transductores Keller # 0022 y KPsi # 601842, sin tomar en cuenta la discrepancia del reloj del transductor KPsi # 601842. Ahora bien, si se ajusta linealmente el reloj del transductor KPi # 60182, de tal forma que coincide con el reloj del transductor Keller # 0022 (al respecto, se optó por un ajuste lineal, encontrándose que se tenían que multiplicar los tiempos del transductor KPsi # 60182 por 0.99973 y sumar una constante -15 s), y si se recalculan las diferencias entre los datos de los transductores (lo que implica hacer una serie de interpolaciones lineales), se obtienen diferencias casi siempre en el rango ± 3 mmca (véase la gráfica de abajo en la figura 9); es decir, de la magnitud de lo que se esperaba encontrar durante la prueba de monitoreo. Al respecto, debe mencionarse que la incertidumbre teórica sobre una diferencia de dos variables con misma incertidumbre, pero independientes es √2 veces más grande (ISO, 1995b); sin embargo, no es sorprendente encontrar diferencias más pequeñas, porque existe una cierta correlación en la sensibilidad a la temperatura de los dos transductores probados (véase la figura 4; se proporcionan más detalles al respecto en Tamari y Alcocer-Yamanaka, 2010).
Conclusión
El objetivo de este trabajo ha sido probar transductores de presión sumergibles de "nueva generación", los cuales cuentan con un sensor de temperatura integrado y un datalogger que corrige automáticamente el efecto de la temperatura sobre la respuesta del sensor de presión. Los resultados obtenidos sugieren que estos transductores no siempre cumplen con todo lo esperado; en particular, algunos instrumentos son probablemente más sensibles a la temperatura que lo especificado por sus fabricantes. Sin embargo, los resultados sugieren también que con estos transductores sí se puede monitorear durante semanas el tirante en tanques de agua potable, con una incertidumbre entre ± 5 y ± 7 mm [p = 0.95] para una escala de medición de 5 m (es decir, ± 0.14% EM), mientras la temperatura del agua permanece en un rango de ± 5 oC. Para alcanzar este objetivo con un transductor similar a los probados, se recomienda tomar ciertas precauciones: (a) en forma preliminar, verificar durante unos días que el offset del transductor no varía más de = ± 5 mmca cuando el instrumento está expuesto a cambios de temperatura de la magnitud esperada en sitio; (b) considerar que la pendiente de la curva de calibración del transductor dependerá de las características del agua (temperatura y salinidad) y del sitio (aceleración de la gravedad) para los cuales se hará el monitoreo; (c) verificar al final de una prueba de monitoreo que tanto el offset como el reloj del instrumento no han tenido cambios importantes.
En forma indirecta, el presente trabajo muestra que no es tan fácil monitorear el tirante con una incertidumbre de = ± 5 mm [p = 0.95] en cuerpos de agua tales como lagos, ríos, canales, embalses de presas y mar. De hecho, podrían tenerse problemas de corrosión y/o incrustación de los sensores sumergibles después de unos meses (Cuscó et al., 1998; Freeman et al., 2004). Además, los cambios de densidad del agua causados por cambios de temperatura (si son mayores a ± 5 oC) o en la salinidad y presencia de partículas en suspensión (si son mayores a ± 0.5 g/l) podrían causar sesgos mayores a los considerados en este trabajo. Finalmente, la hipótesis del equilibrio hidrostático —que es implícita cuando se estima el tirante por medio de un sensor de presión— puede dejar de ser válida bajo ciertas condiciones de flujo: cuando las velocidad del agua cambia rápidamente en el tiempo o cuando las líneas de corriente tienen una curvatura pronunciada (French, 1988, página 45).
Debe aclararse que en este trabajo sólo se considera la incertidumbre sobre una estimación de tirante. No se trata de la incertidumbre sobre una diferencia entre dos estimaciones consecutivas de tirante obtenidas con un mismo transductor (Tamari y Alcocer-Yamanaka, 2010).
Agradecimientos
Se agradece a Elodie Preau (Polytech'Montpellier, Francia) y Jermaine Orlando Braithwaite (UNAM), por su apoyo técnico durante la realización de ciertas pruebas. Se aclara que los autores del presente artículo no tienen motivo alguno de lucro en cuanto a los equipos mencionados en el mismo; se indican las marcas y los modelos para fines de identificación, y se reconoce que pueden encontrarse equipos similares (pero de otras marcas) en el mercado.
Referencias
CUSCÓ, L. (coordinator) et al. Guide to the measurement of pressure and vacuum. National Physical Laboratory (NPL)/Institute of Measurement and Control (IMC), London, 1998 [en línea] www.npl.co.uk [visitado el 26 de febrero de 2010] [ Links ].
FREEMAN, L.A., CARPENTER, M.C., ROSENBERRY, D.O., ROUSSEAU, J.P., UNGER, R. and MCLEAN, J.S. Use of submersible pressure transducers in water-resources investigations. Techniques of water investigations 8-A3. US Geological Service (USGS), Reston (Virginia), USA, 2004 [en línea] www.usgs.gov [visitado el 26 de febrero de 2010] [ Links ].
FRENCH, R.A. Hidráulica de canales abiertos. Naucalpan de Juárez, México: McGraw-Hill/Interamericana de México, 1988. [ Links ]
IOC. Manual on sea level measurement and interpretation. Vol. IV. An update to 2006 (UNESCO Manuals and Guides no. 14). Intergovernmental Oceanographic Commission (IOC) of UNESCO, 2006 [en línea] www.ioc-unesco.org [visitado el 26 de febrero de 2010] [ Links ].
ITRC. Water level sensor testing. ITRC report R04-005. San Luis Obispo, USA: Irrigation Training and Research Center (ITRC), 2004 [en línea] www.itrc.org [visitado el 26 de febrero de 2010] [ Links ].
ISO. Measurement of liquid flow in open channels-Water-level measuring devices (ISO 4373:1995(E)). Genève: International Organization for Standardization (ISO), 1995a. [ Links ]
ISO. Guide to the Expression of Uncertainty in Measurement. Genève: International Organization for Standardization (ISO), 1995b. [ Links ]
OIML. Automatic level gauges for measuring the level of liquid in stationary storage tanks (OIML R-85: 2008(E)). Paris: Organisation Internationale de Métrologie Légale (OIML), 2008 [en línea] www.oiml.org [visitado el 26 de febrero de 2010] [ Links ].
PRESSURE SYSTEMS. WaterMonitor: submersible datalogging level transducer (hoja de especificaciones técnicas no. 1207). Hampton, USA: Pressure Systems Inc., 2007 [en línea] www.pressuresystems.com [visitado el 12 de mayo de 2008] [ Links ].
KELLER. DCX-16(SG/VG): autonomous data collector (hoja de especificaciones técnicas 10/06). Newport News, USA: Keller America Inc., 2006 [en línea] www.kelleramerica.com [visitado el 12 de mayo de 2008] [ Links ].
TAMARI, S., LÓPEZ-VÁZQUEZ, A. y CABRERA, M.A. Método sencillo para incluir la temperatura en la curva de calibración de un transductor de presión. Ingeniería hidráulica en México. Vol. 20, núm. 1, enero-marzo de 2005, pp. 19-27. [ Links ]
TAMARI, S. y ALCOCER-YAMANAKA, V.H. A method to determine water demand and leakage in houses with a roof tank-1. Data acquisition. Water Science & Technology: Water Supply, 2010 (submitted). [ Links ]

