










Servicios Personalizados
Revista
Articulo
 texto en
texto en  Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista mexicana de ciencias forestales
versión impresa ISSN 2007-1132
Rev. mex. de cienc. forestales vol.14 no.77 México may./jun. 2023 Epub 11-Ago-2023
https://doi.org/10.29298/rmcf.v14i77.1349
Scientific article
Generation of routes through ACO for detection of forest fires in the State of Mexico

1Universidad Autónoma del Estado de México. México.
Fires are part of the cycle of some ecosystems and can cause the degradation of others. Their main causes are anthropogenic, including, among others, poorly extinguished bonfires, agricultural activities, and dumping of garbage, all of which generate habitat loss and air pollution on a large scale. This paper refers to the application of a genetic algorithm based on an ant colony to generate, at a theoretical level, verification routes for the monitoring and early detection of forest fires in the State of Mexico by means of unmanned aerial devices, as it is one of the entities with the highest number of forest fires in Mexico. The data used in the proposal were drawn from the reports generated by the National Forestry Commission (Comisión Nacional Forestal, Conafor). During the analysis process, those municipalities that have been affected in at least three different geographic locations were filtered out. In the course of the evaluation process, the software developed displayed the routes with the shortest distances, reordering the filtered localities. Finally, a map is displayed pinpointing the localities where a forest fire has occurred and showing the approximate distance of the entire route. The new routes planned with this procedure resulted in an average 54 % reduction compared to a sequential route.
Keywords Genetic algorithm; ant colony; forest fires; artificial intelligence; path planning; autonomous aerial vehicles
Los incendios forman parte del ciclo de algunos ecosistemas, los cuales pueden ser causantes de la degradación de otros. Algunas de sus causas son principalmente antropogénicas, entre ellas las fogatas mal apagadas, actividades de agricultura y liberación de basura, que generan la pérdida de hábitats y contaminación aérea a gran escala. El presente trabajo hace referencia a la aplicación de un algoritmo genético basado en una colonia de hormigas para generar, de forma teórica, las rutas de verificación para el monitoreo y la detección temprana de incendios forestales en el Estado de México mediante dispositivos aéreos no tripulados, debido a que es una de las entidades con mayor número de este tipo de incidencias en México. Los datos que se emplearon en la propuesta se extrajeron de los registros que genera la Comisión Nacional Forestal (Conafor). Durante el proceso de análisis se realizó el filtrado de los municipios en donde se han presentado afectaciones en al menos tres localidades geográficas distintas. En el proceso de evaluación, el software desarrollado desplegó las rutas en las que se obtuvieron las distancias más cortas, reordenando las localidades extraídas. Finalmente, se despliega el mapa en el cual se ubican aquellas en donde se ha presentado un incendio forestal, así como la distancia aproximada del recorrido total de la ruta. Los resultados presentaron 54 % de media de reducción en las nuevas rutas planificadas, en comparación con una ruta secuencial.
Palabras clave Algoritmo genético; colonia de hormigas; incendios forestales; inteligencia artificial; planificación de recorridos; vehículos aéreos autónomos
Introduction
The causes of forest fires are diverse, given the number of elements that intervene in them, such as available fuel, low humidity in the environment (Cárdenas-Salgado and Pizano, 2019), and direct or indirect human interference, the latter being responsible for 75 to 96 % of forest fires (Hirschberger, 2016). It should be taken into account that fires have the capacity to renew ecosystems (Manríquez, 2019) and thus bring about their continuity.
According to Conafor records of 1970 to 2022, there have been 374 742 forest fires in Mexico, which have affected 14’829 944 hectares, the most affected entities being the State of Mexico, Mexico City, Michoacán, Chihuahua, and Jalisco (Conafor, 2022).
The current climate variations have generated a series of changes in seasonal cycles, leading to a greater release of greenhouse gases, and the loss of natural areas responsible for reducing carbon concentration aggravates the problem (Semarnat, 2018). Today, the rise in global temperatures and droughts have caused forest fires to increase in intensity, as observed in Europe, Australia, and the Western United States (Williams et al., 2019; Dupuy et al., 2020; Haque et al., 2021). When a large number of medium-sized or large-scale forest fires occur, human populations are affected by the release of gases such as carbon monoxide, carbon dioxide, sulfur dioxide, and particulate matter, the latter being the most dangerous (Sandoval et al., 2019; Correa, 2020).
In Mexico, forest fires tend to occur in times of low rainfall, particularly in spring (Alanís-Rodríguez et al., 2008), and their number increases with such phenomena as droughts (Espinoza and González, 2019). The main forms of fire management are related to the formation of fire control brigades (Aguilar et al., 2021), as well as to controlled burn planning to reduce the concentration of available fuel that might generate a large-scale fire (Pérez-Salicrup et al., 2018; Rodríguez et al., 2020).
There are different methods and technologies available for fire detection through the analysis of elements such as fire, smoke, and hot spots, among others (Ramos, 2010). One of the most widely used is satellite technology, which can capture virtually any surface and can verify events such as smoke and fire; an example of this technology is the Early Warning System for Forest Fires (Sistema de Alerta Temprana de Incendios Forestales, SATIF) (Conabio, 2022). Another type of mechanism for estimating fire danger are sensor networks (SN), i. e., electronic devices that are deployed in different areas to obtain such data as humidity, temperature, and wind speed, among others (Aakvaag and Frey, 2006; Cama et al., 2012); the information extracted by the sensors is usually sent wirelessly to a control station.
Other detection systems, such as convolutional neural networks (CNN), usually employ artificial intelligence for efficient pattern recognition (Berzal, 2019); they are one of the most common applications of deep learning (Wiatowski and Bölcskei, 2016; Zhou, 2020) and are responsible for classifying objects in digital images. On the other hand, there are genetic algorithms, which are tools that represent the evolutionary and learning behaviors of living beings, allowing the generation of solutions to problems that require optimization processes, such as the process of calculating routes for the control of forest fires using drones (Wang et al., 2018; Zhou et al., 2019; Shaji, 2022).
When forest fires grow rapidly, the number of personnel needed to contain them is often insufficient, and the associated costs can be high (Mendoza et al., 2012). Today, the application of unmanned aerial vehicles (UAV) allows monitoring and control of forest fires, as can be seen in Kinaneva et al. (2019), Sungheetha and Sharma (2020), and Li et al. (2022). Madridano (2020) proposes an architecture for coordinating drones to fight forest fires; similar proposals are presented by Pérez-Sánchez et al. (2017), with the use of a geo-referenced system for drone use.
On the other hand, there are other types of proposals for drone coordination models, as shown in Casbeer et al. (2005), Harikumar et al. (2018), and Momeni et al. (2022), to show optimal routes, and for coordinating of this type of devices without wasting battery power, as this is an element that conditions their mobility. The papers by Chowdhury et al. (2019), Shao et al. (2021), and Sun et al. (2022) analyze proposals for route calculation. This type of device requires route planning, due to the complexity of the distances, as well as to the number of elements available for monitoring (Wu et al., 2020; Dinh et al., 2021; Saeed et al., 2022). One of the algorithms that stand out for route planning in complex environments is the ant colony algorithm (ACO). High-impact works, such as those by Yang et al. (2020), Wang and Han (2021), and Stodola et al. (2022), highlight the implementation of the ACO because it is very proficient in solving the routing problem based on the traveler’s problem, as shown in the study by Chaudhari and Thakkar (2019), compared to other algorithms like particle swarm optimization (PSO), artificial bee colony (ABC), and others.
Based on the above information, the objective of this research is to develop a proposal for the theoretical prevention and detection of forest fires with UAVs whose displacement is planned automatically using the ACO algorithm, as these devices can incorporate fire detection sensors and fire extinguishing mechanisms, and have flight capabilities that allow them to move through different types of terrain. For this reason, the implementation of UAV devices in the State of Mexico along routes defined through an ACO will help solve the currently existing issues in the detection and containment of forest fires.
Materials and Methods
The State of Mexico is the state in which historically there have been the highest number of forest fires in the country. This state is located in central Mexico; its coordinates are 18°25' and 20°17' N, and 98°33' and 100°28' W; its geography exhibits a cover of temperate forests of approximately 62 % (Ceballos et al., 2008), and these forests are more susceptible to wildfires. Taking into account the above, a proposal has been designed for the generation of routes dedicated to the prevention and detection of forest fires using UAVs. The basis of this work is a procedure that consists in identifying geographic locations where forest fires have occurred, reordering these locations in order to obtain the shortest route, and finally, displaying the route proposed by the ACO.
An ACO is a recurrent algorithm for solving problems like that of the traveler; it consists in simulating the behavior of ants to calculate the probability of a path by creating a pheromone trail and indicating the route to be taken (Goss et al., 1989; Dorigo et al., 1996). In this algorithm, the ants are represented by simple computational agents (computer program) which take an edge (path); the pheromones (information related to the previously explored paths) are then selected; once the agent finishes the task, the result is evaluated in order to subsequently modify the level of pheromones in the trail and determine the best possible route, favoring the shortest edges (also known as the shortest path) with the largest amount of pheromones, the best agent being the one that can update the trail (Merkle and Middendorf, 2000). Figure 1 shows an example of a colony of ants, which illustrates the process of travel to find the best route in search of a target (O) and return to a base point (B), in this case, it is observed that after the generation of the traces, the one that represents the shortest distance to be covered is chosen at the end. For the purpose of the proposal, the algorithm will allow the UAV to find the shortest distance route in the fire verification process.

Each agent moves from state x to state y,
corresponding to a temporary solution. An agent k is in charge
of computing a set of
Where:
When all the agents complete a solution, the traces are updated with
Where:
d = Distance
A = First point
B = Second point
Equation 2 is used to calculate the distances in order to determine the edges that the agents are traveling and the shortest distance between the total distance of the route that is being planned.
Table 1 shows the pseudocode that represents the general form of the ACO, itemizing the basic functions, such as the generation of solutions, the agents involved, and, finally, the update of the pheromones, being these the solution space used by the model. In each cycle, the routes that were most successful for the agents are chosen to determine the order of the points to be used for the route.
Table 1 Pseudocode of the ant colony algorithm.
| Main procedure | |
|---|---|
| 1 | ACO procedure |
| 2 | Until the solution is found, carry out the following |
| 3 | Generate solutions() |
| 4 | Actions agents() |
| 5 | Update pheromones() |
| 6 | Repeat |
| 7 | End of the procedure |
The route calculation model for forest fire detection is displayed in 4 main stages, which are as follows:
1.- Data filtering. This is the main stage of the model; it allows to extract the data from the file showing the geographic positions where a forest fire has occurred in the State of Mexico and it selects those municipalities where there have been at least three forest fires, taking into account that, with locations where only two forest fires or less have occurred, the total distance obtained will be the same if the ACO is not applied, as there will be only one combination for calculating the route.
2.- Listing of positions. Geographic localities are first grouped by municipality, in alphabetical order; then, they are assigned a numerical index ranging from 1 to n, in chronological order of the occurrence of the fire, for the purpose of estimating the shortest route for the UAV to traverse when reordering with the ACO.
3.- Reordering by ACO. The geographic localities are analyzed by the ACO, municipality by municipality, to reorder the localities according to the shortest route that a UAV will be able to execute.
4.- Presentation of results. Two evaluation scenarios are formed: A and B. The former corresponds to the distance that would be obtained if the route were calculated according to the extraction order of the localities, while the latter scenario applies the ordering with ACO. The results are then compared to calculate the percentage of difference between these and verify the minimization of the travel distance. When the solutions are obtained, a map is generated showing, by means of markers, the fires previously recorded. The order of the geographic localities is then presented by the new positions acquired according to their indexes, e.g., a set of indexes [1 2 3] may change to [2 1 3]; this new order must be sent to the UAV to determine its route. Finally, the theoretical total distance of each route is shown.
Figure 2 consists of two maps; the map in Figure 2a shows the geographic localities that have been extracted from a municipality where forest fires have occurred, Figure 2b shows the route to be taken by a UAV for the verification of a possible fire according to the result obtained by the ACO. The corresponding order of the path shown in Figure 2b is [7, 1, 3, 2, 5, 6, 0, 4].

(a) Map with the geographic localities presented in the map for Jilotepec; (b) Route calculated by the ACO for Jilotepec. Inicio = Start.
Figure 2 Geographic coordinates extracted automaticallyt.
The proposal is designed to enter data in real time for the calculation of routes in time intervals of minutes to avoid manual calculation.
Experimental conditions
During the experimental phase, Conafor records on forest fires that occurred in the State of Mexico during the year 2022 were obtained; they included only those municipalities where at least three fires occurred in different geographic locations. Two scenarios have been proposed for the experimentation process: A and B. In scenario A, the distance by municipality is calculated as the geographical locations where forest fires occurred were identified; in scenario B, the ACO was applied in each municipality in order to obtain the shortest route with respect to the identified localities. In both scenarios, the total distance of the route is displayed; the reordering of the localities is shown exclusively in scenario B, and, finally, a map is generated with markers indicating, by municipality, the localities where forest fires have previously occurred. The results obtained from each scenario are compared using a statistical average to verify the reduction in the route travel distances by ACO. Figure 3 shows an example of the two experimental scenarios.

The proposal was developed using Python programming software and executed on a Mac Book Air® device with an M1 processor and 8 GB of RAM. The total number of agents generated for the use of ACO were 1 000.
Results and Discussion
Table 2 shows the results obtained from scenarios A and B, for 51 selected municipalities. As may be seen, the routes generated in scenarios A and B display notable contrasts between each municipality per scenario, with the most efficient cases including more than 16 localities where forest fires have occurred; as can be seen in the case of the municipalities of Acambay, Atlacomulco, Ixtapaluca, and Ocuilan, with verified geographic localities of 45, 18, 49 and 75, respectively. The results of minimization of distances between routes show an average of 54 %, with a maximum of 93 % in the best of cases. The latter percentage was observed with the data obtained in Ocuilan, while in such municipalities as Xalatlaco and Xonacatlán, which include three locations where forest fires occurred, the reduction in the distance was only slightly above 2.5 %.
Table 2 Results of the evaluation of the linear sequential and ACO points of travel.
| Municipality | Distance traveled in km in sequential form (Scenario A) | Distance calculated in km by ACO (Scenario B) | Difference percentage | Total No. of points |
|---|---|---|---|---|
| Acambay de Ruíz Castañeda | 475.795370 | 102.647187 | 78.426190 | 45 |
| Aculco | 115.717489 | 53.2015923 | 54.024588 | 10 |
| Amanalco | 64.7940969 | 33.4645787 | 48.352426 | 6 |
| Amatepec | 56.7129613 | 46.1921931 | 18.550905 | 6 |
| Amecameca | 71.8760222 | 34.4136285 | 52.120849 | 16 |
| Atlacomulco | 146.688067 | 53.6525422 | 63.424058 | 18 |
| Atlautla | 59.7395439 | 22.3597813 | 62.571221 | 12 |
| Axapusco | 8.24465249 | 4.58868830 | 44.343460 | 5 |
| Calimaya | 11.1576808 | 6.75384667 | 39.469081 | 3 |
| Chalco | 92.4847109 | 33.6455081 | 63.620464 | 11 |
| Chapa de Mota | 54.5967691 | 28.5308325 | 47.742635 | 9 |
| Coatepec Harinas | 139.561149 | 43.3919041 | 68.908321 | 26 |
| Donato Guerra | 92.6024808 | 29.6915317 | 67.936569 | 30 |
| El Oro | 7.39867909 | 6.05324432 | 18.184796 | 4 |
| Isidro Fabela | 23.2551310 | 14.1598843 | 39.110709 | 6 |
| Ixtapaluca | 227.335759 | 52.1543733 | 77.058438 | 49 |
| Ixtapan de la Sal | 25.2407404 | 20.3233401 | 19.481997 | 6 |
| Jilotepec | 71.2687924 | 31.0893913 | 56.377272 | 8 |
| Jilotzingo | 97.3415749 | 33.3383085 | 65.751213 | 22 |
| Joquicingo | 12.6388953 | 12.0147468 | 4.9383145 | 7 |
| Juchitepec | 11.4747209 | 10.1182171 | 11.821671 | 5 |
| Lerma | 115.530005 | 38.2361832 | 66.903677 | 28 |
| Luvianos | 28.4607759 | 21.2292671 | 25.408684 | 6 |
| Malinalco | 27.5241960 | 15.0006512 | 45.500129 | 3 |
| Morelos | 195.203301 | 54.2233766 | 72.222100 | 14 |
| Naucalpan de Juárez | 45.1311380 | 22.6778688 | 49.751169 | 15 |
| Nicolás Romero | 422.575669 | 67.3822026 | 84.054405 | 57 |
| Ocoyoacac | 74.0007935 | 29.4023493 | 60.267521 | 19 |
| Ocuilan | 725.232098 | 45.9514755 | 93.663893 | 75 |
| San Felipe del Progreso | 69.2611200 | 29.0239926 | 58.094826 | 8 |
| San José del Rincón | 327.678765 | 96.1962544 | 70.643122 | 38 |
| San Martín de las Pirámides | 3.24954378 | 2.31584122 | 28.733342 | 4 |
| Sultepec | 51.0358086 | 24.4415740 | 52.108970 | 4 |
| Tejupilco | 240.471197 | 75.5886026 | 68.566463 | 21 |
| Temascalcingo | 152.750511 | 47.8811699 | 68.654003 | 16 |
| Temascaltepec | 381.595986 | 95.1915567 | 75.054361 | 32 |
| Tenancingo | 133.138862 | 44.3652242 | 66.67748 | 25 |
| Tenango del Valle | 171.105803 | 45.3239168 | 73.511174 | 24 |
| Tepetlaoxtoc | 32.5046854 | 29.4524634 | 9.3900987 | 6 |
| Texcoco | 78.3423554 | 28.5990137 | 63.494825 | 11 |
| Tlalmanalco | 74.9889762 | 28.2149889 | 62.374484 | 15 |
| Tlalnepantla de Baz | 41.9447468 | 13.1923293 | 68.548315 | 9 |
| Valle de Bravo | 1056.56617 | 125.012732 | 88.168016 | 110 |
| Villa de Allende | 236.115220 | 72.8293532 | 69.155163 | 22 |
| Villa del Carbón | 309.749449 | 77.9311694 | 74.840578 | 33 |
| Villa Guerrero | 89.0352670 | 34.7741147 | 60.943437 | 14 |
| Villa Victoria | 204.061896 | 58.0877317 | 71.534258 | 26 |
| Xalatlaco | 5.94543065 | 5.79518474 | 2.5270820 | 3 |
| Xonacatlán | 5.31337491 | 5.12475651 | 3.5498793 | 3 |
| Zinacantepec | 189.094685 | 55.5089530 | 70.644889 | 18 |
Figure 4 shows a graph of the most relevant results, where it is possible to compare the reduction in the route traveled by each municipality. The most notable being Valle de Bravo, going from a total route in scenario A of 1 056.56 km to 125.01 km in scenario B. For the previous case, the advantage of the ACO over the calculation of routes that are generated without a distance minimization process is clearly observed. On the other hand, it is observed that in sites where there are three localities with distances of a few kilometers, the reduction is less than 5 %. In municipalities with three localities, but with greater distance between them, better results can be obtained in the minimization process, as observed in the cases of Calimaya and Malinalco.
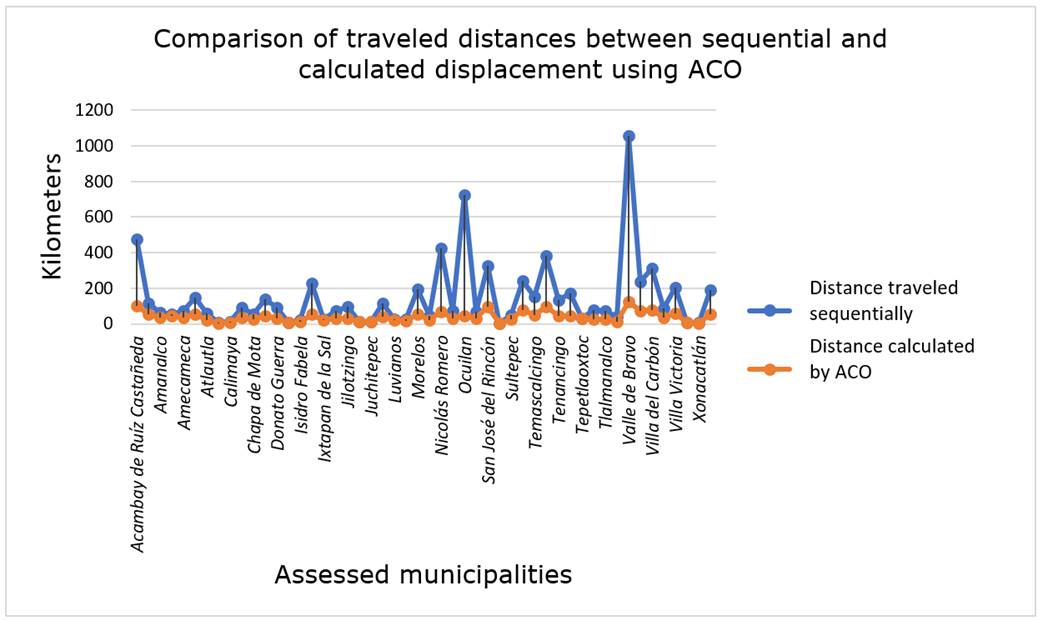
The largest percentage differences with respect to the distance traveled in the two scenarios for the analyzed municipalities were found in Ocuilan, Valle de Bravo, and Morelos, while the smallest decrease was obtained in the routes of Villa Guerrero, Xonacatlán, and Jilotzingo. The difference between a greater or lesser reduction in the distance of the route generated depends on the number of locations, the distance between these, and the probability of a greater number of existing returns.
Figure 5a shows the geographic localities in which forest fires have occurred in the municipality of Amecameca, which are indicated by markers in the form of blue balloons; these contain a reference name (name of the municipality and index of the locality) to provide a spatial reference of where the forest fire has occurred previously. Figure 5b shows the route calculated sequentially, while Figure 5c shows the route calculated with ACO.
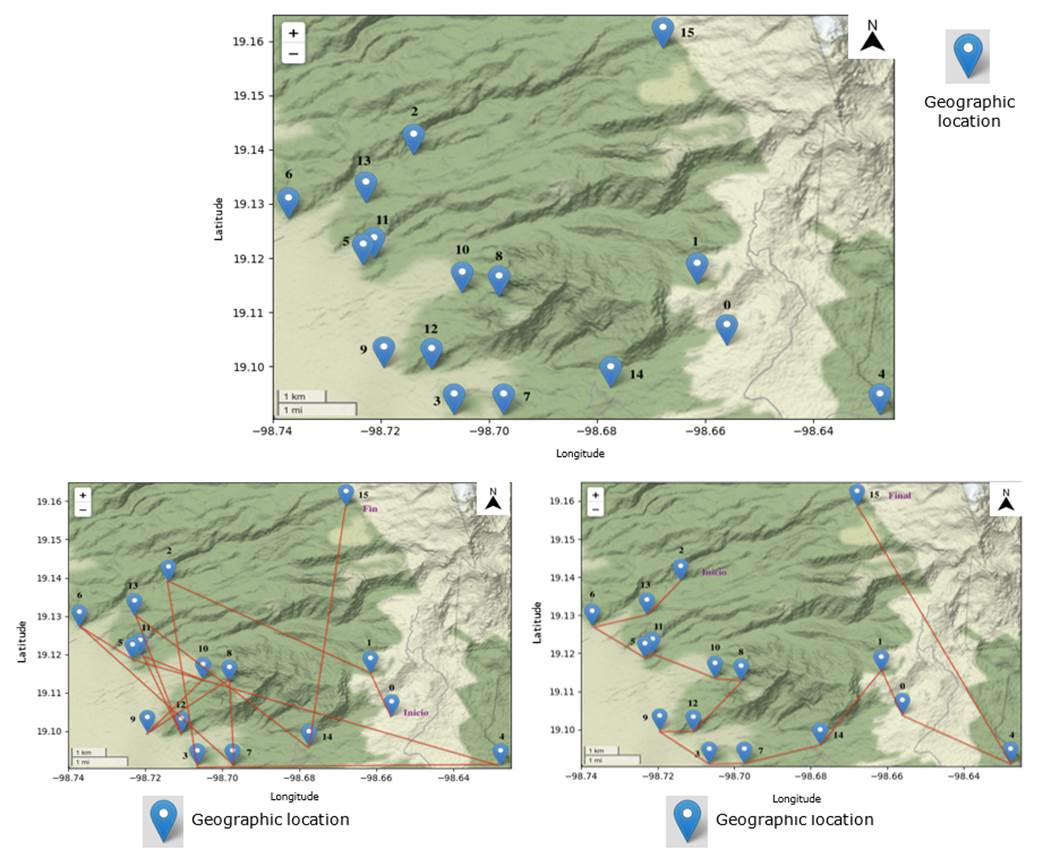
(a) Map with aggregate coordinates; (b) Sequentially calculated route; (c) Route calculated by ACO.
Figure 5 Areas where forest fires have occurred, municipality of Amecameca.
Based on the experimental results thus obtained, it is possible to verify that the ACO offers a viable solution for reducing route travel distances, estimating similar values in the minimization of distances to those cited in the works of Zhou et al. (2019) and Wu et al. (2020). Compared to works involving drones flying in forested areas like those of Sungheetha and Sharma (2020) and Li et al. (2022) ―based on UAV devices with cameras or IoT devices deployed on an area of land, but without applying an analysis of the routes in order to reduce the travel distance―, it has the advantage of allowing, through the use of previous fire records, to generate routes to carry out the process of preventing and detecting forest fires, as well as to optimize the energy expenditure in the route of the UAV units.
During the development of the experimental scenarios A and B, no excessive consumption of computational resources such as RAM memory and CPU time was observed; however, the existence an internet connection error was apparent when calculating the distance of the routes to cover all the municipalities, which proved insufficient, as well as when using the data from the selected library, in this case, GeoPy. Therefore, it was necessary to carry out the evaluation by groups of 10 in 10 municipalities in order to avoid this particular result. The operational characteristics of the software allow it to process more data inputs than those used in the experimental phase to obtain data from all the municipalities in the country, as well as to provide real-time solutions, considering that the routes can remain in force for up to 5 years, as long as there are no drastic changes in the areas analyzed, due to changes in the composition or in the precipitation cycle and weather conditions.
Conclusions
Computational evolutionary algorithms, such as ant colony-based genetic algorithms, provide solutions to optimization problems, specifically for the generation of routes that can be traversed in the shortest possible distance by unmanned aerial vehicles. During the experiments, it was observed that despite the large number of points that have been extracted in different municipalities, the tendency was always oriented towards a reduction with respect to the sequential route initially proposed, obtaining in the best case a 93 % reduction of the initial distance, which indicates that, in regions where a large number of fires are detected in a seemingly random fashion, the gain in route planning is highly significant, with a mean of 54 % of all the municipalities analyzed, as well as when the points are distant (more than 10 kilometers).
While it is true that in Mexico there are groups for the prevention and control of forest fires, resources such as staff and time available are limited. Therefore, implementing UAV systems with route generation through ACO for the prevention and detection of fires at strategic points will allow the development of this type of activity in an efficient and effective way in coordination with human personnel. Since the calculation of routes involves a high degree of automation, the amount of data entered can be greater than hundreds of geographic locations, making it highly flexible to contemplate the entry of new locations, which can be implemented in real time to obtain new routes according to the needs that arise in specific contexts.
Acknowledgments
The authors are grateful to the Council for Science and Technology of the State of Mexico (Consejo Mexiquense de Ciencia y Tecnología, Comecyt) for the support granted for this project.
REFERENCES
Aakvaag, N. y J. E. Frey. 2006. Redes de sensores inalámbricos, nuevas soluciones de interconexión para la automatización industrial. Revista ABB 2:39-42. https://www.researchgate.net/profile/NielsAakvaag/publication/28135303 . (1 de diciembre de 2022). [ Links ]
Aguilar M., S., E. Valtierra P., M. de J. González G., J. M. Salas G., A. L. Merino y M. Hernández J. 2021. Brigadas comunitarias para la conservación y gestión de los recursos forestales en San Miguel Topilejo, Tlalpan, Ciudad de México. Sociedad y Ambiente (24):1-24. Doi: 10.31840/sya.vi24.2361. [ Links ]
Alanís-Rodríguez, E., J. Jiménez-Pérez, D. Espinoza-Vizcarra, E. Jurado-Ybarra, O. A. Aguirre-Calderón y M. A. González-Tagle. 2008. Evaluación del estrato arbóreo en un área restaurada post-incendio en el Parque Ecológico Chipinque, México. Revista Chapingo Serie Ciencias Forestales y del Ambiente 14(2):113-118. https://www.scielo.org.mx/pdf/rcscfa/v14n2/v14n2a6.pdf . (15 de enero de 2023). [ Links ]
Berzal, F. 2019. Redes Neuronales and Deep Learning 1: Entrenamiento de redes neuronales artifiales. Editorial Independiente. Madrid, Md, España. 450 p. [ Links ]
Cama, A., E. De la Hoz y D. Cama. 2012. Las redes de sensores inalámbricos y el internet de las cosas. INGE CUC 8(1):163-172. https://revistascientificas.cuc.edu.co/ingecuc/article/view/253/232 . (20 de enero de 2023). [ Links ]
Cárdenas-Salgado, J. C. y C. Pizano. 2019. Efecto de temperaturas que simulan incendios sobre la germinación de semillas de un bosque seco tropical. Colombia Forestal 22(2):55-66. Doi: 10.14483/2256201X.14702. [ Links ]
Casbeer, D. W., R. W. Beard, T. W. McLain, S. M. Li and R. K. Mehra. 2005. Forest fire monitoring with multiple small UAVs. In: American Automatic Control Council. Proceedings of the 2005, American Control Conference 2005. Institute of Electrical and Electronics Engineers (IEEE). Portland, OR, United States of America. pp. 3530-3535. [ Links ]
Ceballos, G., R. List, G. Garduño, R. López C., … y J. E. San Román (Comps.). 2009. La diversidad biológica del Estado de México. Estudio de estado. Editorial Biblioteca Mexiquense del Bicentenario, Gobierno del Estado de México y Comisión Nacional para el Conocimiento y Uso de la Biodiversidad. Toluca, Edo. Méx., México. 535 p. https://biblioteca.semarnat.gob.mx/janium/Documentos/Ciga/Libros2011/EEB_EDOMEX_baja.pdf . (7 de abril de 2023). [ Links ]
Chaudhari, K. and A. Thakkar. 2019. Travelling Salesman Problem: An empirical comparison between ACO, PSO, ABC, FA and GA. In: Kacprzyk, J. (Edit.). Advances in intelligent systems an computing. Springer Singapore. Gateway East, SG, Singapore. pp. 397-405. [ Links ]
Chowdhury, S., M. Marufuzzaman, H. Tunc, L. Bian and W. Bullington. 2019. A modified ant colony optimization algorithm to solve a dynamic traveling salesman problem: A case study with drones for wildlife surveillance. Journal of Computational Design and Engineering 6(3):368-386. Doi: 10.1016/j.jcde.2018.10.004. [ Links ]
Comisión Nacional Forestal (Conafor). 2022. Histórico Incendios Forestales en México 1970-2022. https://snif.cnf.gob.mx/estadisticas-de-incendios/ . (10 de febrero de 2023). [ Links ]
Comisión Nacional para el Conocimiento y Uso de la Biodiversidad (Conabio). 2022. Nuevo sitio web del Sistema de Alerta Temprana de Incendios Forestales para México y América Central (SATIF). https://www.gob.mx/conabio/prensa/nuevo-sitio-web-del-sistema-de-alerta-temprana-de-incendios-forestales-para-mexico-y-america-central-satif?idiom=es#:~:text=http%3A%2F%2Fincendios%2Dbeta.conabio.gob.mx,-%2D%2D%2D%2D%2D&text=Fue%20creada%20por%20Acuerdo%20Presidencial%20el%2016%20de%20marzo%20de%201992 . (10 de febrero de 2023). [ Links ]
Correa G., A. 2020. Contaminación atmosférica por incendios forestales en Morelia, Michoacán. Ciencia Nicolaita (80):56-75. Doi: 10.35830/cn.vi80.511. [ Links ]
Dinh, Q. T., D. D. Do and M. H. Hà. 2021. Ants can solve the parallel drone scheduling traveling salesman problem. In: Chicano, F. (Edit.). GECCO´21: Proceedings of the Genetic and Evolutionary Computation Conference. Association for Computing Machinery. New York, NY, United States of America. pp. 14-21. [ Links ]
Dorigo, M., V. Maniezzo and A. Colorni. 1996. Ant System: Optimization by a colony of cooperating agents. IEEE Transactions on Systems, Man, and Cybernetics-Part B (Cybernetics) 26(1):29-41. Doi: 10.1109/3477.484436. [ Links ]
Dupuy, J. L., H. Fargeon, N. Martin, F. Pimont, ... and P. Fernandes. 2020. Climate change impact on future wildfire danger and activity in southern Europe: a review. Annals of Forest Science 77(2):35. Doi: 10.1007/s13595-020-00933-5. [ Links ]
Espinoza J., A. R. y L. Gómez M. 2019. Incendios forestales y el fenómeno de sequía: el caso de San Luis Potosí, México. Tlalli Revista de Investigación en Geografía 1(1):13-24. Doi: 10.22201/ffyl.26832275e.2019.1.381. [ Links ]
Gambardella, L. M. and M. Dorigo. 1996. Solving symmetric and asymmetric TSPs by ant colonies. In: Institute of Electrical and Electronics Engineers (IEEE). Proceedings of IEEE International Conference on Evolutionary Computation. IEEE. Nagoya, N, Japan. pp. 622-627. [ Links ]
Goss, S., S. Aron, J. L. Deneubourg and J. M. Pasteels. 1989. Self-organized shortcuts in the Argentine ant. Naturwissenschaften 76:579-581. Doi: 10.1007/BF00462870. [ Links ]
Haque, K., A. K. Azad, Y. Hossain, T. Ahmed, M. Uddin and M. Hossain. 2021. Wildfire in Australia during 2019-2020, its impact on health, biodiversity and environment with some proposals for risk management: a review. Journal of Environmental Protection 12(6):391-414. Doi. 10.4236/jep.2021.126024. [ Links ]
Harikumar, K., J. Senthilnath and S. Sundaram. 2018. Multi-UAV oxyrrhis marina-inspired search and dynamic formation control for forest firefighting. IEEE Transactions on Automation Science and Engineering 16(2):863-873. Doi: 10.1109/TASE.2018.2867614. [ Links ]
Hirschberger, P. 2016. Forests ablaze: Causes and effects of global forest fires. WWF Deutschland. Berlin, BER, Germany. 107 p. https://www.wwf.de/fileadmin/fm-wwf/Publikationen-PDF/WWF-Study-Forests-Ablaze.pdf . (1 de abril de 2023). [ Links ]
Kinaneva, D., G. Hristov, J. Raychev and P. Zahariev. 2019. Early forest fire detection using drones and artificial intelligence. In: Koricic, M., Z. Butkovic, K. Skala, Z. Car, … and M. Janjic (Edits). 42nd International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO). Institute of Electrical and Electronics Engineers (IEEE). Opatija, HR, Croatia. pp. 1060-1065. [ Links ]
Li, S., L. Qiao, Y. Zhang and J. Yan. 2022. An early forest fire detection system based on DJI M300 Drone and H20T Camera. In: Institute of Electrical and Electronics Engineers (IEEE). 2022 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE. Dubrovnik, DU, Croatia. pp. 932-937. [ Links ]
Madridano C., A. 2020. Arquitectura de software para navegación autónoma y coordinada de enjambres de drones en labores de lucha contra incendios forestales y urbanos. Tesis de Doctorado, Departamento de Ingeniería de Sistemas y Automática, Universidad Carlos III de Madrid. Madrid, MD, España. 232 p. [ Links ]
Manríquez Z., H. M. 2019. Especies forestales afectadas en incendios ocurridos en Amazonas: Un análisis de la información fiscal de los casos de Chachapoyas y Luya. Arnaldoa 26(3):965-976. Doi: 10.22497/ARNALDOA.263.26307. [ Links ]
Mendoza A., S., R. Z. Ríos M. y M. A. Díaz R. 2012. Optimizando el despliegue de recursos en la extinción de un incendio forestal. Ingenierías 15(55):58-64. http://eprints.uanl.mx/id/eprint/10494 . (5 de abril de 2023). [ Links ]
Merkle, D. and M. Middendorf. 2000. An ant algorithm with a new pheromone evaluation rule for total tardiness problems. In: Cagnoni, S. (Edit.). Real-World Applications of Evolutionary Computing. Springer Berlin. Edinburgh, SC, United Kingdom. pp. 287-296. [ Links ]
Momeni, M., H. Soleimani, S. Shahparvari and B. Afshar-Nadjafi. 2022. Coordinated routing system for fire detection by patrolling trucks with drones. International Journal of Disaster Risk Reduction 73:102859. Doi: 10.1016/j.ijdrr.2022.102859. [ Links ]
Pérez-Sánchez, H. A., E. U. Benítez-Rendón y M. Díaz-Rodríguez. 2017. Sistema de georeferenciado de imágenes con drones. Ra Ximhai 13(3):65-77. Doi: 10.35197/rx.13.03.2017.04.hp. [ Links ]
Pérez-Salicrup, D. R., R. Ortíz M., E. Garduño M., H. L. Martínez-Torres, … y A. González C. 2018. Coordinación institucional para la realización de quemas prescritas y quemas controladas en México. Revista Mexicana de Ciencias Forestales 9(49):252-270. Doi: 10.29298/rmcf.v9i49.169. [ Links ]
Ramos R., M. P. 2010. Manejo de fuego. Editorial Félix Varela. La Habana, LH, Cuba. 240 p. https://gfmc.online/wp-content/uploads/Manejo-del-Fuego-Ramos-Rodriguez-Cuba-2010.pdf . (15 de diciembre de 2022). [ Links ]
Rodríguez T., D. A., P. Martínez M., J. A. Pulido L., P. J. Martínez L. y J. D. Cruz L. 2020. Combustibles, comportamiento del fuego y emisiones en un pastizal y una sabana artificiales en Chiapas, México. Revista de Biología Tropical 68(2):641-654. Doi: 10.15517/rbt.v68i2.33954. [ Links ]
Saeed, R. A., M. Omri, S. Abdel-Khalek, E. S. Ali and M. F. Alotaibi. 2022. Optimal path planning for drones based on swarm intelligence algorithm. Neural Computing and Applications 34(12):10133-10155. Doi: 10.1007/s00521-022-06998-9. [ Links ]
Sandoval D., B., T. Reyes R. y M. Oyarzún G. 2019. Mecanismos de los efectos nocivos para la salud de la contaminación atmosférica proveniente de incendios forestales. Revista Chilena de Enfermedades Respiratorias 35(1):49-57. Doi: 10.4067/S0717-73482019000100049. [ Links ]
Secretaría de Medio Ambiente y Recursos Naturales (Semarnat). 2018. Incendios forestales y cambio climático. https://www.gob.mx/semarnat/articulos/incendios-forestales-y-cambio-climatico . (1 de diciembre de 2022). [ Links ]
Shaji, K. 2022. Using ant colony optimization to route a team of UAVs to fires based on known fire intensities. In: Tiwari, S. and S. Chaudhary (Edits.). 15th Innovations in Software Engineering Conference. Association for Computing Machinery. New York, NW, United States of America. pp. 1-8. [ Links ]
Shao, J., J. Cheng, B. Xia, K. Yang and H. Wei. 2021. A novel service system for long-distance drone delivery using the “Ant Colony+A*” algorithm. IEEE Systems Journal 15(3):3348-3359. Doi: 10.1109/JSYST.2020.2994553. [ Links ]
Stodola, P., P. Otřísal and K. Hasilová. 2022. Adaptive ant colony optimization with node clustering applied to the Travelling Salesman Problem. Swarm and Evolutionary Computation 70:1-18. Doi: 10.1016/j.swevo.2022.101056. [ Links ]
Sun, Z. H., X. Luo, E. Q. Wu, T. Y. Zuo, Z. R. Tang and Z. Zhuang. 2022. Monitoring scheduling of drones for emission control areas: An ant colony-based approach. IEEE Transactions on Intelligent Transportation Systems 23(8):11699-11709. Doi: 10.1109/TITS.2021.3106305. [ Links ]
Sungheetha, A. and R. Sharma R. 2020. Real time monitoring and fire detection using internet of things and cloud based drones. Journal of Soft Computing Paradigm 2(3):168-174. Doi: 10.36548/jscp.2020.3.004. [ Links ]
Wang, C., P. Liu, T. Zhang and J. Sun. 2018. The adaptive vortex search algorithm of optimal path planning for forest fire rescue UAV. In: Institute of Electrical and Electronics Engineers (IEEE). 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC). IEEE. Chongqing, CN, China. pp. 400-405. [ Links ]
Wang, Y. and Z. Han. 2021. Ant colony optimization for traveling salesman problem based on parameters optimization. Applied Soft Computing 107:107439. Doi: 10.1016/j.asoc.2021.107439. [ Links ]
Wiatowski, T. and H. Bölcskei. 2016. A mathematical theory of deep convolutional neural networks for feature extraction. IEEE Transactions on Information Theory 64(3):1845-1866. Doi: 10.1109/TIT.2017.2776228. [ Links ]
Williams, A. P., J. T. Abatzoglou, A. Gershunov, J. Guzman‐Morales, … and D. P. Lettenmaier. 2019. Observed impacts of anthropogenic climate change on wildfire in California. Earth's Future 7(8):892-910. Doi: 10.1029/2019EF001210. [ Links ]
Wu, P., Y. Wang and B. Wang. 2020. An ant colony algorithm for drone path planning. In: IEEE Computer Society. 2020 5th International Conference on Mechanical, Control and Computer Engineering (ICMCCE). The Institute of Electrical and Electronics Engineers, Inc. Harbin, Hei, China. pp. 1559-1562. [ Links ]
Yang, K., X. You, S. Liu and H. Pan. 2020. A novel ant colony optimization based on game for traveling salesman problem. Applied Intelligence 50(12):4529-4542. Doi: 10.1007/s10489-020-01799-w. [ Links ]
Zhou, D. X. 2020. Theory of deep convolutional neural networks: Downsampling. Neural Networks 124:319-327. Doi: 10.1016/j.neunet.2020.01.018. [ Links ]
Zhou, J., W. Zhang, Y. Zhang, Y. Zhao and Y. Ma. 2019. Optimal path planning for UAV patrolling in forest fire prevention. In: Zhang, X. (Edit.). The Proceedings of the 2018 Asia-Pacific International Symposium on Aerospace Technology (APISAT 2018). Springer Singapore. Gateway East, SG, Singapore. pp. 2209-2218. [ Links ]
Received: March 04, 2023; Accepted: May 23, 2023
 Este es un artículo publicado en acceso abierto bajo una licencia
Creative Commons
Este es un artículo publicado en acceso abierto bajo una licencia
Creative Commons
