











 texto en
texto en  Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
Las causas de los incendios forestales son diversas, debido a la cantidad de elementos que intervienen en ellos como el combustible disponible y humedad baja en el ambiente (Cárdenas-Salgado y Pizano, 2019), así como la interferencia de forma directa o indirecta del hombre, esta última es la responsable de entre 75 y 96 % de los incendios forestales (Hirschberger, 2016). Es importante considerar que los incendios tienen la capacidad de renovar los ecosistemas (Manríquez, 2019) para dar paso a su continuidad.
En México, de acuerdo con los registros de Conafor, desde 1970 hasta 2022, se han presentado 374 742 incendios forestales, los cuales han afectado 14 829 944 ha; las entidades más afectadas han sido Estado de México, Ciudad de México, Michoacán, Chihuahua y Jalisco (Conafor, 2022).
Las variaciones climatológicas actuales han generado una serie de cambios en los ciclos de las estaciones, lo que provoca una mayor liberación de gases de efecto invernadero, y aunado a ello, la pérdida de áreas naturales que contribuyen a reducir la concentración de carbono, agrava el problema (Semarnat, 2018). Actualmente, el incremento de la temperatura a nivel global, así como las sequias, han propiciado que los incendios forestales aumenten de intensidad, tal y como se observa en Europa, Australia y el oeste de Estados Unidos de América (Williams et al., 2019; Dupuy et al., 2020; Haque et al., 2021). Cuando ocurre una gran cantidad de incendios forestales de tamaño mediano o a gran escala, las poblaciones humanas son afectadas por la liberación de gases como el monóxido de carbono, dióxido de carbono, dióxido de azufre y por material particulado, estos últimos son los más peligrosos (Sandoval et al., 2019; Correa, 2020).
En México, los incendios forestales tienden a presentarse en las épocas de poca precipitación, particularmente en primavera (Alanís-Rodríguez et al., 2008) y su número es mayor cuando hay fenómenos como las sequías (Espinoza y González, 2019). Las principales formas de manejo de incendios se relacionan con la conformación de brigadas para su control (Aguilar et al., 2021), además de la planeación de quemas controladas para reducir la concentración de combustible disponible que pueda generar un incendio a gran escala (Pérez-Salicrup et al., 2018; Rodríguez et al., 2020).
Existen distintos métodos y tecnologías disponibles para la detección de incendios mediante el análisis de elementos como fuego, humo, puntos de calor, entre otros (Ramos, 2010). Una de las más empleadas es la tecnología satelital, la cual permite capturar prácticamente cualquier superficie y permite verificar eventos como humo y fuego, un ejemplo de ello es el Sistema de Alerta Temprana de Incendios Forestales (SATIF) (Conabio, 2022). Otro tipo de mecanismos para estimar el peligro de incendio son las redes de sensores (RS), las cuales son dispositivos electrónicos que se despliegan en distintas áreas para obtener datos de humedad, temperatura, velocidad del viento, entre otros datos (Aakvaag y Frey, 2006; Cama et al., 2012). La información que extraen los sensores es enviada, generalmente, por vía inalámbrica a una estación de control.
Otros sistemas de detección suelen emplear inteligencia artificial para el reconocimiento de patrones de forma eficiente, esas técnicas incluyen a las redes neuronales convolucionales (RNC o CNN del inglés Convolutional Neural Network) (Berzal, 2019), que son una de las aplicaciones más comunes del aprendizaje profundo (Wiatowski y Bölcskei, 2016; Zhou, 2020), y se encargan de clasificar objetos en imágenes digitales. Por otra parte, están los algoritmos genéticos, los cuales son herramientas que representan los comportamientos evolutivos y de aprendizaje de seres vivos, que permiten generar soluciones a problemas que requieren de procesos de optimización, como es el proceso de cálculo de rutas para el control de incendios forestales mediante drones (Wang et al., 2018; Zhou et al., 2019; Shaji, 2022).
Cuando los incendios forestales crecen aceleradamente, la cantidad de personal disponible para contenerlos puede ser insuficiente, y los costos asociados a ello son elevados (Mendoza et al., 2012). Hoy en día, la aplicación de vehículos aéreos no tripulados (VANT) facilita la realización de acciones de monitoreo y control de incendios forestales (Kinaneva et al., 2019; Sungheetha y Sharma, 2020; Li et al., 2022). Madridano (2020) propone una arquitectura para coordinar drones y combatir incendios forestales; planteamientos similares se presentan en Pérez-Sánchez et al. (2017) con un sistema georreferenciado para el uso de drones.
Existen otros tipos de propuestas para colocar modelos de coordinación de drones (Casbeer et al., 2005; Harikumar et al., 2018; Momeni et al., 2022) para generar rutas óptimas que les permita desplazarse sin desperdiciar la energía de sus baterías, debido a que es un elemento que condiciona su movilidad. En los trabajos de Chowdhury et al. (2019), Shao et al. (2021) y Sun et al. (2022) se analizan sugerencias para el cálculo de rutas. Se requiere la planificación de las rutas por la complejidad de las distancias y la cantidad de elementos que se tienen para realizar el monitoreo (Wu et al., 2020; Dinh et al., 2021; Saeed et al., 2022). Entre los algoritmos para la planeación de rutas en ambientes complejos destaca el referente a colonia de hormigas (ACH).
Autores como Yang et al. (2020), Wang y Han (2021) y Stodola et al. (2022) resaltan la implementación del ACH porque es altamente competente para resolver el problema de rutas basada en la dificultad del viajante, esto se demuestra en el estudio de Chaudhari y Thakkar (2019), en comparación con algoritmos como la optimización por enjambre de partículas (PSO del inglés Particle Swarm Optimization), colonia artificial de abejas (ABC del inglés Artificial Bee Colony), entre otros.
Con base en la información anterior, en la presente investigación se plantea el objetivo de desarrollar una propuesta de prevención y detección de incendios forestales de forma teórica con el uso de VANT, cuyo desplazamiento se planifica de forma automática mediante el algoritmo ACH, ya que estos dispositivos pueden incorporar sensores de detección de incendios y mecanismos de extinción de incendios, aunados a sus capacidades de vuelo, lo cual les permite desplazarse por diferentes tipos de terrenos. Por tal razón, con la implementación de dispositivos VANT en el Estado de México con rutas definidas a través de un ACH será posible ayudar a solventar los problemas actuales que existen en la detección y contención de incendios forestales.
Materiales y Métodos
El Estado de México es la entidad del país en la cual, históricamente, se ha presentado la mayor cantidad de incendios forestales. Esta entidad federativa se ubica en el centro de México, en las coordenadas 18°25' y 20°17' de latitud norte, y 98°33' y 100°28' longitud oeste, y su geografía presenta una distribución de cubiertas forestales de bosque templado en 62 % de su territorio (Ceballos et al., 2009), los cuales son muy susceptibles a incendios forestales. Con base en lo anterior, se diseñó una propuesta para la generación de rutas dedicadas a la prevención y detección de incendios forestales mediante VANT. La base del trabajo consiste en extraer localidades geográficas en las que se han presentado incendios forestales, posteriormente, el ACH reordena las localidades geográficas para obtener la ruta más corta, y finalmente, se despliega la ruta propuesta por el ACH.
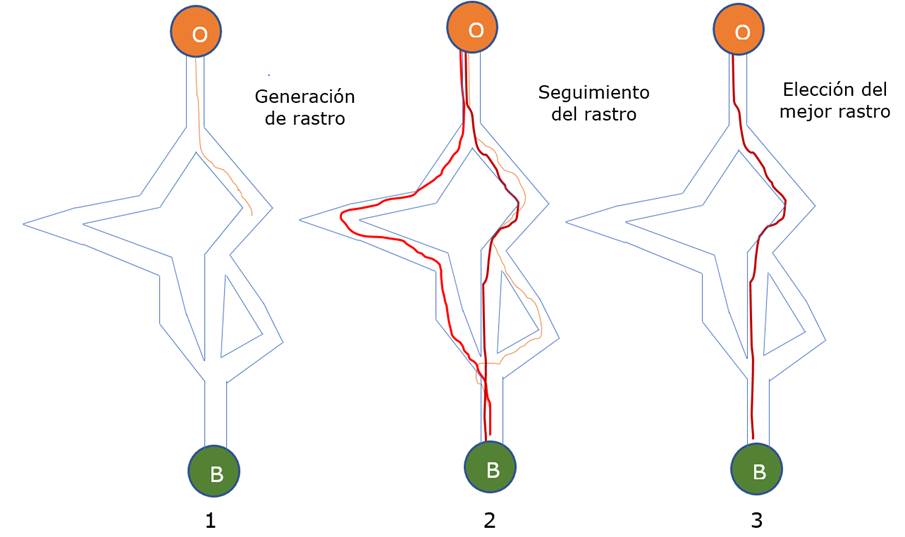
Un ACH es un algoritmo recurrente para solucionar problemas como el del viajante; consiste en simular el comportamiento de las hormigas para calcular la probabilidad de un camino mediante la creación de un rastro de feromonas e indicar la ruta a la que se debe de llegar (Goss et al., 1989; Dorigo et al., 1996). En este algoritmo, las hormigas son representadas por agentes computacionales simples (programa de computadora), los cuales toman un borde (camino); posteriormente se realiza la selección de feromonas (información relativa a los caminos previamente explorados). Cuando el agente termina la tarea, se evalúa el resultado para modificar el nivel de feromonas en el rastro y determinar la mejor ruta posible en la que se favorecen los bordes más cortos (también conocido como el trayecto más corto) con una mayor cantidad de feromonas, y el mejor agente es el que puede actualizar el rastro (Merkle y Middendorf, 2000). En la Figura 1 se presenta un ejemplo de colonia de hormigas, en la cual se ilustra el proceso de recorrido para determinar la mejor ruta en la búsqueda de un objetivo (O) y realizar el retorno a un punto base (B). En este caso se observa que después de la generación de los rastros, al final se elige el que representa la menor distancia por recorrer. Para el objetivo de la propuesta, el algoritmo permitirá al VANT encontrar la ruta de menor distancia en el proceso de verificación de incendios.
Cada agente se mueve de un estado x a un estado y,
que corresponde a una solución temporal. Un agente k es el
responsable de computar un conjunto
Donde:
Cuando todos los agentes completan una solución, los rastros se actualizan con:
Donde:
d = Distancia
A = Primer punto
B = Segundo punto
Con la Ecuación 2 se calculan las distancias para determinar los bordes que van recorriendo los agentes y así determinar la menor distancia entre el recorrido total de la ruta que se está planeando.
El Cuadro 1 muestra el pseudocódigo que representa la forma general del ACH en el cual están las funciones básicas como es la generación de soluciones, los agentes que intervienen y finalmente la actualización de las feromonas, ya que estas son el espacio de solución que emplea el modelo. En cada ciclo, se eligen las rutas en las que alcanzaron mayor éxito los agentes, y de esta forma se determina el orden de los puntos para el recorrido de una ruta.
Cuadro 1 Pseudocódigo del algoritmo de colonia de hormigas.
| Procedimiento principal | |
|---|---|
| 1 | Procedimiento ACH |
| 2 | Mientras no encuentre la solución, realizar |
| 3 | Generar Soluciones () |
| 4 | Acciones Agentes () |
| 5 | Actualización Feromonas () |
| 6 | Repetir |
| 7 | Fin del procedimiento |
El modelo de cálculo de rutas para la detección de incendios forestales se integra por cuatro etapas principales, las cuales se muestran a continuación:
1.- Filtrado de datos. Es la etapa principal del modelo, permite extraer los datos del fichero en el que se encuentran las posiciones geográficas donde se ha presentado un incendio forestal en el Estado de México y selecciona aquellos municipios con registro de al menos tres incendios forestales. Se considera que con dos incendios o menos, la distancia total obtenida es igual si no se aplica el ACH, ya que solo existe una combinación para calcular la ruta.
2.- Enumeración de posiciones. Los grupos de localidades geográficas por municipio se forman con base en el orden alfabético de estos, posteriormente se les asigna un índice numérico de 1 a n; para ello, se considera el registro histórico en el que sucedió el incendio y se identifica de forma numérica, con la finalidad de que al momento de que se realice el reordenamiento con el ACH, se obtenga la ruta más corta para el recorrido del VANT.
3.- Reordenamiento mediante ACH. Las localidades geográficas son analizadas por el ACH, municipio por municipio, para que al final se obtenga un nuevo orden de las localidades en función de la ruta más corta que ejecutará un VANT.
4.- Presentación de resultados. Se forman dos escenarios de evaluación: A y B. El primero corresponde a la distancia que se obtendría si se calculara la ruta de recorrido en función del orden de extracción de las localidades, mientras que en el segundo escenario se aplica el ordenamiento con ACH. Los resultados se comparan para obtener una diferencia porcentual de estos y verificar la minimización de la distancia de la ruta. Al obtener las soluciones, se genera un mapa en el cual se muestra, mediante marcadores, los incendios anteriormente registrados. El orden de las localidades geográficas se presenta mediante las nuevas posiciones que adquieren sus índices, por ejemplo, un conjunto de índices [1 2 3] puede cambiar a [2 1 3]; este nuevo orden debe enviarse al VANT para que lleve a cabo su recorrido. Finalmente, se muestra el recorrido total teórico de cada ruta.
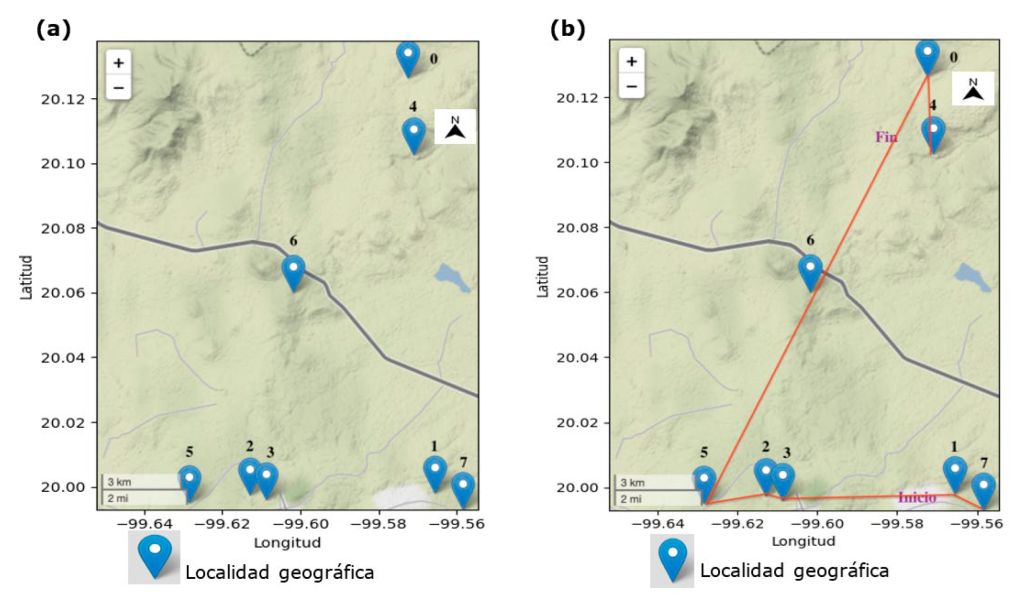
En la Figura 2 se presentan dos mapas; en la Figura 2a se observan las localidades geográficas extraídas de un municipio en donde ocurrieron incendios forestales, y en la Figura 2b se muestra el recorrido que debe de realizar un VANT para la verificación de un posible incendio de acuerdo con el resultado que obtuvo el ACH. El orden correspondiente del recorrido de la Figura 2b es [7, 1, 3, 2, 5, 6, 0, 4].

(a) Mapa con las localidades geográficas presentadas en el mapa para Jilotepec; (b) Ruta calculada por el ACH para Jilotepec.
Figura 2 Coordenadas geográficas extraídas de forma automática.
La propuesta está diseñada para ingresar datos en tiempo real para el cálculo de rutas en intervalos de tiempo en el orden de minutos, y evitar su cálculo de forma manual.
Condiciones de experimentación
En la fase de experimentación, se obtuvieron los registros de la Conafor sobre incendios forestales que se presentaron en el Estado de México durante 2022 en aquellos municipios donde ocurrieron al menos tres eventos en localidades geográficas distintas. Se propusieron dos escenarios para el proceso de experimentación: A y B. En el escenario A se realizó el cálculo de la distancia por municipio conforme se fueron extrayendo las localidades geográficas con registro de incendios, y en el escenario B se aplicó por cada municipio el ACH para obtener la ruta más corta con respecto a las localidades extraídas. En ambos se desplegó la distancia total del recorrido de la ruta, y solo para el escenario B se presentó el reordenamiento de las localidades. Finalmente se generó un mapa con marcadores por municipio que indican aquellas en las que previamente se registraron incendios forestales.
Los resultados de cada escenario se compararon mediante una media estadística para verificar la reducción en el recorrido de las rutas por ACH. En la Figura 3 se ejemplifican los dos escenarios experimentales.

(a) Escenario A; (b) Escenario B.
Figura 3 Propuesta experimental para el recorrido de distancias mediante ACH.
La propuesta se desarrolló en el software de programación Python y se ejecutó en un dispositivo Mac Book Air ® con procesador M1 y 8 GB de RAM. Las generaciones totales de agentes que se emplearon para el ACH fueron 1 000.
Resultados y Discusión
Los resultados de los escenarios A y B se muestran en el Cuadro 2, con 51 municipios seleccionados. Las rutas generadas en los dos escenarios tuvieron contrastes notables entre municipios por escenario. Los casos de mayor eficiencia se observaron cuando hubo más de 16 localidades con ocurrencia de incendios forestales; los municipios Acambay, Atlacomulco, Ixtapaluca y Ocuilan con localidades geográficas verificadas de 45,18, 49 y 75, respectivamente. Referente a la minimización de distancias entre rutas, se obtuvo una media de 54 % con un máximo de 93 % en el mejor de los casos. Esto último se observó con los datos de Ocuilan, mientras que en los municipios Xalatlaco y Xonacatlán, que tuvieron tres localidades con incendios forestales, la reducción de la distancia solo superó 2.5 %.
Cuadro 2 Resultados obtenidos al evaluar los puntos de recorrido secuencial lineal y por ACH.
| Municipio | Distancia recorrida en km de forma secuencial (Escenario A) | Distancia calculada en km por ACH (Escenario B) | Diferencia porcentual | Puntos totales |
|---|---|---|---|---|
| Acambay de Ruíz Castañeda | 475.795370 | 102.647187 | 78.426190 | 45 |
| Aculco | 115.717489 | 53.2015923 | 54.024588 | 10 |
| Amanalco | 64.7940969 | 33.4645787 | 48.352426 | 6 |
| Amatepec | 56.7129613 | 46.1921931 | 18.550905 | 6 |
| Amecameca | 71.8760222 | 34.4136285 | 52.120849 | 16 |
| Atlacomulco | 146.688067 | 53.6525422 | 63.424058 | 18 |
| Atlautla | 59.7395439 | 22.3597813 | 62.571221 | 12 |
| Axapusco | 8.24465249 | 4.58868830 | 44.343460 | 5 |
| Calimaya | 11.1576808 | 6.75384667 | 39.469081 | 3 |
| Chalco | 92.4847109 | 33.6455081 | 63.620464 | 11 |
| Chapa de Mota | 54.5967691 | 28.5308325 | 47.742635 | 9 |
| Coatepec Harinas | 139.561149 | 43.3919041 | 68.908321 | 26 |
| Donato Guerra | 92.6024808 | 29.6915317 | 67.936569 | 30 |
| El Oro | 7.39867909 | 6.05324432 | 18.184796 | 4 |
| Isidro Fabela | 23.2551310 | 14.1598843 | 39.110709 | 6 |
| Ixtapaluca | 227.335759 | 52.1543733 | 77.058438 | 49 |
| Ixtapan de la Sal | 25.2407404 | 20.3233401 | 19.481997 | 6 |
| Jilotepec | 71.2687924 | 31.0893913 | 56.377272 | 8 |
| Jilotzingo | 97.3415749 | 33.3383085 | 65.751213 | 22 |
| Joquicingo | 12.6388953 | 12.0147468 | 4.9383145 | 7 |
| Juchitepec | 11.4747209 | 10.1182171 | 11.821671 | 5 |
| Lerma | 115.530005 | 38.2361832 | 66.903677 | 28 |
| Luvianos | 28.4607759 | 21.2292671 | 25.408684 | 6 |
| Malinalco | 27.5241960 | 15.0006512 | 45.500129 | 3 |
| Morelos | 195.203301 | 54.2233766 | 72.222100 | 14 |
| Naucalpan de Juárez | 45.1311380 | 22.6778688 | 49.751169 | 15 |
| Nicolás Romero | 422.575669 | 67.3822026 | 84.054405 | 57 |
| Ocoyoacac | 74.0007935 | 29.4023493 | 60.267521 | 19 |
| Ocuilan | 725.232098 | 45.9514755 | 93.663893 | 75 |
| San Felipe del Progreso | 69.2611200 | 29.0239926 | 58.094826 | 8 |
| San José del Rincón | 327.678765 | 96.1962544 | 70.643122 | 38 |
| San Martín de las Pirámides | 3.24954378 | 2.31584122 | 28.733342 | 4 |
| Sultepec | 51.0358086 | 24.4415740 | 52.108970 | 4 |
| Tejupilco | 240.471197 | 75.5886026 | 68.566463 | 21 |
| Temascalcingo | 152.750511 | 47.8811699 | 68.654003 | 16 |
| Temascaltepec | 381.595986 | 95.1915567 | 75.054361 | 32 |
| Tenancingo | 133.138862 | 44.3652242 | 66.67748 | 25 |
| Tenango del Valle | 171.105803 | 45.3239168 | 73.511174 | 24 |
| Tepetlaoxtoc | 32.5046854 | 29.4524634 | 9.3900987 | 6 |
| Texcoco | 78.3423554 | 28.5990137 | 63.494825 | 11 |
| Tlalmanalco | 74.9889762 | 28.2149889 | 62.374484 | 15 |
| Tlalnepantla de Baz | 41.9447468 | 13.1923293 | 68.548315 | 9 |
| Valle de Bravo | 1056.56617 | 125.012732 | 88.168016 | 110 |
| Villa de Allende | 236.115220 | 72.8293532 | 69.155163 | 22 |
| Villa del Carbón | 309.749449 | 77.9311694 | 74.840578 | 33 |
| Villa Guerrero | 89.0352670 | 34.7741147 | 60.943437 | 14 |
| Villa Victoria | 204.061896 | 58.0877317 | 71.534258 | 26 |
| Xalatlaco | 5.94543065 | 5.79518474 | 2.5270820 | 3 |
| Xonacatlán | 5.31337491 | 5.12475651 | 3.5498793 | 3 |
| Zinacantepec | 189.094685 | 55.5089530 | 70.644889 | 18 |
En la Figura 4 se presenta una gráfica de los resultados más relevantes, en la cual es posible comparar la reducción en el recorrido de la ruta por cada municipio. El más notable fue Valle de Bravo, que pasó de un recorrido total en el escenario A de 1 056.56 km a 125.01 km en el escenario B. Para el caso anterior, se observa claramente la ventaja que tiene el ACH sobre el cálculo de rutas que se generan sin un proceso de minimización de distancias. Por otra parte, es evidente que en sitios en los que existen tres localidades con distancias de pocos kilómetros, la reducción es inferior a 5 %. En municipios con tres localidades, pero con mayor distancia entre ellas, se pueden obtener mejores resultados en el proceso de minimización, como sucedió en Calimaya y Malinalco.

Las diferencias porcentuales más acentuadas con respecto a la distancia recorrida de los dos escenarios se presentaron en Ocuilan, Valle de Bravo y Morelos, mientras que una menor disminución se registró en las rutas de Villa Guerrero, Xonacatlán y Jilotzingo. La diferencia de una mayor o menor reducción en cuanto a la distancia de la ruta generada está en función de la cantidad de localidades, la distancia entre estas y la probabilidad de un número más alto de retornos existentes.
En la Figura 5a se muestran las localidades geográficas en las cuales se han presentado incendios forestales en el municipio Amecameca, estas se indican por marcadores en forma de globos azules que contienen un nombre de referencia (nombre del municipio e índice de la localidad) para obtener una referencia espacial de donde ocurrió el incendio. En la Figura 5b se muestra la ruta calculada de forma secuencial, y en la Figura 5c la ruta calculada con ACH.
(a) Mapa con coordenadas agregadas; (b) Ruta calculada de forma secuencial; (c) Ruta calculada por ACH.
Figura 5 Puntos en donde se han presentado incendios forestales, municipio Amecameca, Estado de México.
De acuerdo con los resultados experimentales, se verifica que el ACH representa una solución viable para la reducción de distancias en el recorrido de rutas, ya que se obtienen valores similares en la minimización de distancias con respecto a los trabajos de Zhou et al. (2019) y Wu et al. (2020). En relación con trabajos efectuados con drones que se desplazan en áreas forestales, como los basados en dispositivos VANT con cámaras o dispositivos IoT desplegados en un terreno, pero sin aplicar un análisis sobre las rutas para reducir la distancia del recorrido, se tiene la ventaja que al emplear registros previos de incendios, es factible generar rutas para la ejecución del proceso de prevención y detección de incendios forestales, así como para la optimización del gasto energético en el recorrido de las unidades VANT (Sungheetha y Sharma, 2020; Li et al., 2022).
Durante el desarrollo de los escenarios experimentales A y B, no se observó un consumo de recursos computacionales de forma excesiva, como sería el caso de la memoria RAM y tiempo en CPU, pero era notorio que al calcularse la distancia de las rutas hasta terminar con todos los municipios, así como el uso de datos en la librería empleada, en este caso fue GeoPy, presentaba un error de conexión a internet, por lo que fue necesario hacer la evaluación por grupos de 10 en 10 municipios. A partir de las características de operación del software, es posible procesar entradas de datos superiores a las que se emplearon en la fase experimental para obtener datos de todos los municipios del país, así como para obtener soluciones en tiempo real, si se considera que las rutas pueden permanecer vigentes hasta por 5 años, mientras que no existan cambios drásticos en las zonas analizadas por cambios en la composición de la biomasa o en el ciclo de precipitaciones y de las condiciones climatológicas.
Conclusiones
Los algoritmos evolutivos computacionales, como es el caso de los algoritmos genéticos basados en colonias de hormigas, permiten obtener soluciones a problemas de optimización, específicamente para la generación de rutas para vehículos aéreos no tripulados que puedan recorrerse en la menor distancia posible. Durante los experimentos, se observó que a pesar de la gran cantidad de puntos procedentes de distintos municipios, la tendencia siempre estuvo orientada a una reducción, con respecto a la ruta secuencial inicialmente planteada, con una reducción máxima de distancia inicial de 93 %, lo cual indica que en las regiones donde se detecta una gran cantidad de incendios aparentemente aleatoria, la ganancia en la planificación de la ruta es muy significativa, con una media de 54 % de todos los municipios analizados, así como cuando los puntos son distantes (más de 10 kilómetros).
Si bien es cierto que en México existen agrupaciones para la prevención y control de incendios forestales, los recursos disponibles de personal y tiempo son limitados, por lo tanto, la implementación de sistemas VANT con generación de rutas mediante ACH para la prevención y detección de incendios en puntos estratégicos permitirá desarrollar esas actividades de forma eficiente y eficaz en coordinación con personal humano. Dado que el cálculo de rutas presenta un alto grado de automatización, la cantidad de datos ingresados pueden ser superiores a centenas de localidades geográficas, por lo que es altamente flexible para el ingreso de nuevas localidades, las cuales es factible implementarlas en tiempo real para obtener rutas nuevas en función de las necesidades que se presenten en contextos específicos.

