











 texto em
texto em  Inglês (pdf)
Inglês (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
PermalinkIntroducción
El trabajo se enfoca en la reducción del consumo de energía en el uso de implementos agrícolas de labranza primaria, específicamente en un multicultivador vibratorio. La estructura del trabajo, en primer lugar, explica en qué consiste el multicultivador vibratorio y posteriormente se presenta la calibración de los sensores.
Para efectos de implementación se ha utilizado un multicultivador desarrollado en el departamento de diseño de nuevos productos de la Empresa Tecnomec Agrícola. Se le llama multicultivador, porque permite realizar: subsoleo, barbechado vertical, y desterronado. Según Cadena et al. (2012) éste multicultivador fue evaluado por el Departamento de Ingeniería Agrícola de la Universidad Autónoma Agraria Antonio Narro (UAAAN), con excelentes resultados en aspectos como disturbación del suelo, tamaño de agregados, demanda de potencia y consumo de combustible.
Campos et al. (2015a) y Campos et al. (2015b) modificaron el multicultivador colocando timones someros en la parte frontal y timones de mayor longitud en la parte trasera. En los timones de la parte trasera se utilizaron aletas de diferentes tamaños para aumentar la superficie disturbada. Utilizando la teoría de profundidad crítica en equipos de labranza, las pruebas de campo realizadas con este acomodo les permitieron demostrar que los consumos de energía se pueden disminuir.
Por otra parte, Campos et al. (2015a) han realizado trabajos de investigación relacionados con labranza inteligente, donde se utilizaron sistemas de información geográfica y de localización global (GPS) para mapear el terreno que se requiere preparar, en base a este mapa, se rotura el suelo a profundidad variable dependiendo de su dureza, redundando en la variación del consumo de energía.
Shahgoli et al. (2009) y Shahgoli et al. (2010) han reportado que, -22.5o fue el ángulo de oscilación óptimo para la reducción de la fuerza de tiro y ahorro de potencia. En su estudio sobre la optimización de la frecuencia oscilatoria en labranza vibratoria, los timones fueron oscilados con una amplitud de ± 69 mm y un ángulo de oscilación de 27o usando una velocidad de avance de 3 km/h. La frecuencia de oscilación se varió desde 1.9 a 8.8 Hz. Hubo una frecuencia óptima cercana a los 3.3 Hz que minimizó la potencia total del motor requerida para operar el subsolador. Al comparar con un equipo de labranza rígido se estimó una reducción de potencia del motor arriba de 26%. Adicionalmente, realizó una simulación para calcular el comportamiento dinámico del sistema tractor-subsolador oscilatorio enfocado en las vibraciones del asiento del operador. Sahay et al. (2009) demostraron el efecto en la profundidad de trabajo al inducir vibración en el implemento agrícola.
Desarrollaron un equipo con transmisión modificada logrando inducir vibraciones en frecuencias entre 9-13 Hz y entre 15-35 Hz. Induciendo vibración la profundidad de trabajo fue de 15.3 cm mientras que al utilizar el mismo equipo sin vibración fue de 7.4 cm.
Wu y Song (2010) diseñaron un escarificador para praderas, el cual muestra un trabajo estable y disturbación efectiva con una velocidad de avance de 1 m/s y una frecuencia de vibración de 10.0 Hz. Por otro lado, Tong (2009), adoptó un mecanismo de escarificación profundo combinando pequeñas aletas vibratorias las cuales generan la vibración utilizando movimiento alternativo del timón por medio de un mecanismo de biela manivela. Li et al. (2009) desarrollaron un escarificador vibratorio profundo, compararon la resistencia a la tracción entre el modo vibratorio y el no vibratorio a una profundidad de 30 cm, la escarificación vibratoria profunda reduce efectivamente la resistencia a la tracción de 13% a 18%. Dong et al. (2010) utilizaron un mecanismo de rompimiento de suelo en pradera por medio de un dispositivo de vibración forzada, demostraron que existe un ángulo óptimo entre el timón y la dirección de roturación, para la reducción de la resistencia a la tracción.
Zhao (2010) inventó un escarificador profundo el cual se comparó con un escarificador común, se redujo de manera significativa la resistencia a la tracción, el consumo de energía y se elevó la calidad de la disturbación profunda en una estructura similar de suelo y condiciones de trabajo.
Zhou (2009) linealizó la resistencia a la roturación, y concluyó por medio de cálculos dinámicos y pruebas repetitivas que la vibración reduce efectivamente la resistencia específica del suelo y la resistencia a la roturación. También, Lili et al. (2013) realizaron un análisis dinámico y experimental de un subsolador vibratorio, encontrando que las mejores condiciones de trabajo del implemento de labranza ISZ-160 son: velocidad hacia adelante de 0.2 m/s y la frecuencia de vibración de 10 Hz, la resistencia tractiva es baja y el efecto de roturación del suelo es bueno. En cierta posición de profundidad, al incrementar la velocidad se incrementa la resistencia tractiva. Cuando el tractor se desplaza muy rápido hacia adelante, la resistencia tractiva se reduce con una amplitud pequeña en la condición vibratoria comparado con la condición no vibratoria.
El alcance de este proyecto comprende la calibración de los sensores del octagonal de anillo extendido, sensor para determinar la frecuencia del timón vibratorio y el sensor de torque, con el objetivo de poder determinar el consumo de energía en un timón vibratorio utilizado en la labranza vertical.
Materiales y métodos
Para determinar la potencia utilizada en actividades de labranza primaria aplicando vibración inducida, se utilizó un dispositivo cuyos timones puedan vibrar al menos en 3.3 y 4.9 Hz, también permite una amplitud de vibración de 60 y 70 mm. Este dispositivo está conformado por una estructura o chasis, un timón oscilatorio, un mecanismo oscilatorio de biela manivela, un motor hidráulico, una válvula reguladora de flujo y un transductor de torque. En las Figuras 1 y 2 se muestran los principales componentes del dispositivo utilizado.

Figura 1 Vista isométrica del aparato de labranza vibratoria. 1) chasis; 2) motor hidráulico; 3) cople; 4) transductor de torque; 5) biela manivela; 6) timón o cincel; 7) transductor oae; 8) pico; y 9) soporte ajustable de biela.
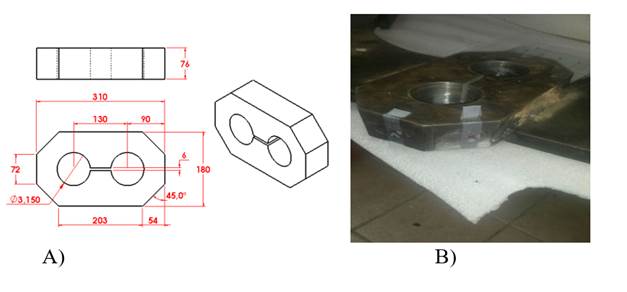
Figura 2 Transductor octagonal de anillo extendido (OAE); A) dimensiones del octagonal; y B) ubicación de galgas extensométricas.
El dispositivo experimental se monta al sistema de enganche de tres puntos de un tractor agrícola categoría II y el sistema oscilatorio es accionado por el sistema hidráulico del tractor. El chasis corresponde a la estructura del aparato en el cual se montan todos los componentes incluyendo el sistema de enganche de tres puntos. El mecanismo de biela manivela es el que ocasiona la oscilación del timón como se muestra en la Figura 1, este mecanismo se acciona por medio de un motor hidráulico de bajas revoluciones y alto torque, y la frecuencia de giro se controla por medio de una válvula reguladora de flujo. Adicionalmente, para medir el par que se genera en el momento de estallamiento del suelo, se colocó un transductor de torque entre el cople del motor hidráulico y el mecanismo oscilatorio.
Para medir la fuerza horizontal y vertical que ejerce el suelo sobre el timón al momento de la ruptura del suelo, se fabricó un transductor octagonal de anillo extendido (OAE) con las dimensiones que se muestran en la Figura 3. El transductor OAE se colocó unido al timón como se muestra en la Figura 1.

Figura 3 Sensor para determinar la frecuencia de oscilación del timón vibratorio; A) tarjeta electrónica; y b) sensor montado sobre la flecha.
El transductor OAE cuenta con galgas extensométricas marca Kyowa (tipo KFG-5-350-C1-11, Japón) para la determinación de la fuerza en las direcciones horizontal y vertical.
Para determinar la frecuencia de oscilación en tiempo real del aparato vibratorio, se desarrolló una tarjeta electrónica utilizando un sensor optoelectrónico infrarrojo de corte (modelo H21A1, EUA).
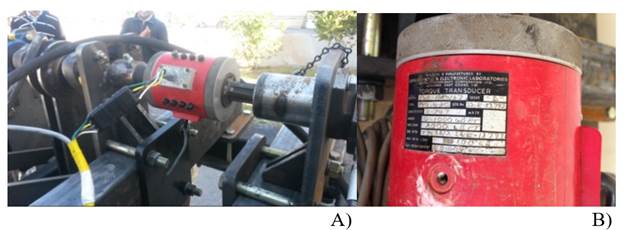
Para medir el par que se genera durante la ruptura del suelo, se utilizó un transductor de torque, facilitado por el INIFAP Campo Experimental Cotaxtla Veracruz, México, por gestión de la Universidad Autónoma Agraria Antonio Narro (UAAAN) Saltillo, Coahuila, México. El transductor de torque número de serie 52-E-73.792, fue diseñado y manufacturado por: British Hovercraft Corporation Ltd,. Osborne, East Cowes. I.W. Figura 4, 5 y 6.

La investigación de laboratorio se llevó a cabo durante el período de enero a octubre de 2015 en el departamento de Ingeniería Agrícola, ubicado 25° 21.52” latitud norte y 101° 50” longitud oeste y una altitud de 1 740.5 msnm, perteneciente a la UAAAN.
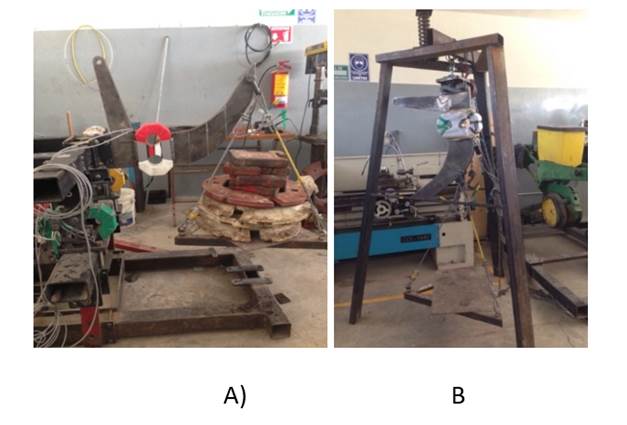
Para medir las fuerzas en la dirección horizontal y vertical simultáneamente, de forma independiente y con alta precisión, el transductor OAE se calibró estáticamente utilizando ocho pesos de: 470.8, 470.8, 716.13, 716.13, 343.35, 343.35, 294.30, 294.30 N, de forma acumulada sobre la canastilla y de manera inversa la descarga, con 5 repeticiones en cada corrida. Este proceso se hizo tanto para la dirección de la fuerza horizontal como para la fuerza vertical.
El sistema de adquisición de datos utilizado en la calibración incluye: Daqbook2000, un acondicionador de voltaje modelo DBK43A, una computadora Dell Optiplex GX520 y el software DaqView.
Con la finalidad de medir el torque aplicado en el estallamiento del suelo se calibró el transductor de torque, para lo cual se utilizó el sistema de adquisición de datos Logbook360. La calibración se realizó con dos brazos de palanca de 0.65 y 0.85 metros y con 4 pesos de carga de 294.30, 294.30, 343.5, 343.5 N de forma acumulada y la descarga de manera inversa, con 5 repeticiones.
Los datos obtenidos se cargaron en el software Minitab V16 y utilizando regresión lineal se obtuvieron las curvas y las constantes de calibración.
Resultados y discusión
Los resultados se presentan en tres apartados que comprenden la construcción del aparato, calibración del sensor para determinar la frecuencia del timón oscilatorio y la calibración del transductor del octagonal de anillo extendido.
Construcción del aparato
El aparato de labranza vibratoria se fabricó en el centro Investigación y Desarrollo Aplicado de Aguascalientes SC, en colaboración con Tecnomec Agrícola SA de CV, ambas localizadas en Aguascalientes, México.
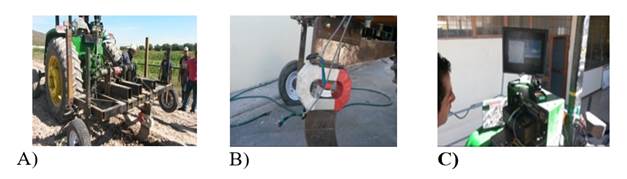
En la Figura 7 se muestra el aparato de labranza vibratoria instrumentado, el transductor OAE que se utiliza para medir las fuerzas horizontal y vertical que ejerce el suelo sobre el cincel, el transductor de torque que se utiliza para medir el par requerido para el estallamiento del suelo, el sensor optoelectrónico infrarrojo para medir la frecuencia del mecanismo oscilatorio y el sistema de adquisición de datos el cual captura toda la información de los transductores en tiempo real y los almacena, para posteriormente ser analizados.
Calibración del sensor del octagonal de anillo extendido
Para obtener la misma precisión de medición en los dos transductores, fue necesario uniformizar el coeficiente de constante por medio del ajuste de calibración en los 3 canales del amplificador que corresponden a cada sensor y ajustar la ganancia de entrada, el compensador y el voltaje de excitación. En los Cuadros 1 y 5 se pueden observar estos valores.
Cuadro 1 Valores de voltaje para calibrar el transductor OAE.
| Sensor | Cable | Canal | Voltaje de excitación |
Ganancia (V) |
Escala (V) |
|---|---|---|---|---|---|
| Ortogonal | Negro-Azul | CH5 | 5.5 | 4.5 | 4.5 |
| Negro-Verde | CH6 | 5.5 | 4.5 | 4.5 |
Cuadro 2 Relación de peso contra medias de voltaje con 5 repeticiones.
| Peso (N) | Media (mV) |
Desviación estándar |
Coeficiente de variación |
|---|---|---|---|
| 470.88 | 6.22 | 0.691 | 11.10 |
| 941.76 | 11.96 | 0.391 | 3.27 |
| 1412.64 | 18.48 | 0.63 | 3.41 |
| 2128.77 | 28.24 | 0.733 | 2.60 |
| 2472.12 | 32.42 | 0.798 | 2.46 |
| 2815.47 | 36.80 | 0.663 | 1.80 |
| 3109.77 | 40.98 | 0.887 | 2.16 |
| 3404.07 | 45.46 | 0.336 | 0.74 |
| 3109.77 | 41.72 | 0.581 | 1.39 |
| 2815.47 | 37.96 | 0.865 | 2.28 |
| 2472.12 | 32.76 | 0.564 | 1.72 |
| 2128.77 | 28.60 | 0.846 | 2.96 |
| 1412.64 | 19.16 | 0.472 | 2.46 |
| 941.76 | 12.38 | 0.545 | 4.40 |
| 470.88 | 6.46 | 0.477 | 7.39 |
Cuadro 3 Relación de pesos contra medias de voltajes y sus 5 repeticiones de calibración.
| Peso (N) | Media (mV) |
Desviación estándar |
Coeficiente de variación |
|---|---|---|---|
| 470.88 | 9.58 | 0.626 | 6.54 |
| 941.76 | 18.08 | 1.377 | 6.29 |
| 1412.64 | 28.74 | 1.425 | 5.05 |
| 2128.77 | 42.58 | 1.524 | 3.58 |
| 2472.12 | 51.20 | 1.239 | 2.42 |
| 2815.47 | 56.86 | 0.713 | 1.25 |
| 3109.77 | 63.84 | 1.824 | 2.86 |
| 3404.07 | 70.56 | 1.163 | 1.65 |
| 3109.77 | 65.14 | 1.519 | 2.33 |
| 2815.47 | 59.58 | 1.307 | 2.19 |
| 2472.12 | 52.68 | 1.268 | 2.41 |
| 2128.77 | 44.90 | 0.464 | 1.03 |
| 1412.64 | 29.12 | 1.101 | 3.78 |
| 941.76 | 19.46 | 1.518 | 7.80 |
| 470.88 | 9.76 | 1.587 | 16.26 |
Cuadro 4 Velocidad y frecuencia de oscilación del cincel.
| Tiempo (s) | Núm. de pulsos | Frecuencia (Hz) | RPM |
|---|---|---|---|
| 10 | 147 | 2.94 | 176.4 |
| 10 | 148 | 2.96 | 177.6 |
| 10 | 149 | 2.98 | 178.8 |
| 10 | 148 | 2.96 | 177.6 |
| 10 | 149 | 2.98 | 178.8 |
Cuadro 5 Valores de voltaje para calibrar el transductor de torque.
| Cable | Voltaje de excitación (V) | Ganancia (V) | Escala (V) |
|---|---|---|---|
| Blanco- amarillo | 2.5 | 2.5 | 2.5 |
En la Figura 8, se presenta la gráfica escalonada de la calibración del transductor OAE correspondiente a la fuerza vertical. En el Cuadro 2, se muestran las medias de los valores en mV de cada escalón generados por cada carga para determinar la ecuación de calibración para la fuerza vertical. En la Figura 9 se muestra la ecuación de regresión con la constante de 75.00 mV por N, con una linealidad de 99.8%, resultados muy similares obtuvieron Campos et al. (2015c).
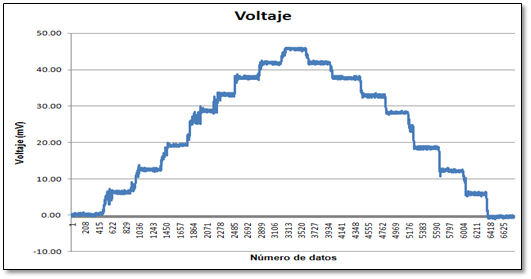
Figura 8 Ciclos de carga y descarga del transductor OAE durante la calibración con diferentes pesos para la fuerza vertical.

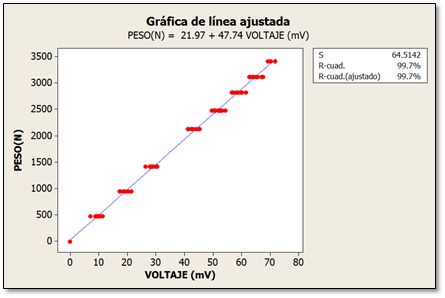
En la Figura 10, se muestra la gráfica escalonada de la calibración del transductor OAE correspondiente a la fuerza horizontal, en el Cuadro 3 se muestran las medias de los valores en mV de cada escalón generados por cada carga para determinar la ecuación de calibración para la fuerza horizontal. En la Figura 11 se muestra la ecuación de regresión con la constante mencionada de 47.74 mV por N con una linealidad de 99.7%, resultados similares obtuvieron Campos et al. (2015b).

Figura 10 Ciclos de carga y descarga del transductor OAE durante la calibración con diferentes pesos para la fuerza horizontal.
Calibración del sensor para determinar la frecuencia del timón vibratorio
Para calcular la velocidad angular con la que gira la flecha que transmite la vibración, fue necesario instalar un encoder con cinco muescas por revolución. La calibración consistió en mandar una cantidad de pulsos y verificar que la pantalla LCD registrara la misma cantidad de pulsos enviados (Cuadro 4). Para evitar rebotes se colocó un capacitor cerámico 104.
Calibración del sensor de torque
En la Figura 12, se puede observar la deformación en mV generada a partir del ascenso y descenso de cuatro pesos con un brazo de palanca de 0.85 m, en el Cuadro 6 se muestra la magnitud del torque (Nm), que generó la deformación, versus el valor medio del voltaje (mV) censado con cinco repeticiones de calibración. En la Figura 13 se muestra la ecuación de regresión con la constante de 0.4538 mV por Nm con una linealidad de 98.8%.

Figura 12 Ciclos de carga y descarga del transductor de torque durante la calibración con diferentes pesos.
Cuadro 6 Torque (Nm ) vs. Voltaje (mV) para el transductor de torque.
| Momento (Nm) | Media (mV) | Desviación estándar | Coeficiente de variación |
|---|---|---|---|
| 191.3 | 367.0 | 53.7 | 14.64 |
| 250.2 | 524.1 | 33.8 | 6.45 |
| 382.6 | 764.1 | 56.8 | 7.43 |
| 500.3 | 1 037.1 | 55.8 | 5.38 |
| 605.8 | 1 081.0 | 412.0 | 38.11 |
| 792.2 | 1 723.8 | 72.2 | 4.19 |
| 828.9 | 1 719.8 | 37.8 | 2.20 |
| 1084.0 | 2 290.0 | 39.4 | 1.72 |
| 792.2 | 1 685.1 | 54.9 | 3.26 |
| 605.8 | 1 292.8 | 98.1 | 7.58 |
| 500.3 | 1 009.5 | 48.5 | 4.80 |
| 382.6 | 782.6 | 93.1 | 11.89 |
| 250.2 | 459.3 | 42.7 | 9.29 |
| 191.3 | 371.4 | 102.2 | 27.51 |

Conclusiones
Según los objetivos planteados, se logró establecer la calibración de los transductores del multicultivador vibratorio para determinar las fuerzas horizontal y vertical en tiempo real que se ejerce sobre el timón durante el trabajo, en el mismo orden de ideas se calibró el sensor que se utiliza para medir la frecuencia de oscilación del timón y por último se calibró el transductor de torque. En la calibración de los transductores para la fuerza vertical se tiene una constante de calibración de 75.00 N-mV -1 con una linealidad de 99.8%, para la fuerza horizontal una constante de 47.74 N-mV -1 con una linealidad de 99.7% y para el transductor de torque, una constante de 0.4538 Nm-mV -1 . con una linealidad de 98.8%, garantizando alta confiabilidad y precisión de las mediciones de fuerzas, frecuencia y torque en tiempo real durante las pruebas de campo.

