











 text in
text in  English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
A nivel mundial cada vez es más frecuente la mejora de la producción agrícola mediante la aplicación de sistemas electrónicos de control automático, que además de las ventajas significativas en su desempeño, facilitan la operación, el ajuste, la detección de fallos permitiendo realizar las actividades más adecuadas de acuerdo a las exigencias agronómicas del cultivo.
El desarrollo y aplicación de los sistemas de control automático permiten la adap tación de las técnicas de cultivo a las condiciones ambientales, teniendo en cuenta además las necesidades de las plantas y la imprescindible op timización de la utilización de insumos, para conse guir un cultivo rentable y racional en zonas pequeñas de una misma explotación agrícola (IDEA, 2010; Méndez, 2015).
Pero la aplicación de los sistemas de control automático (SCA) en la agricultura, todavía se encuentran en la primera etapa de su desarrollo y su poca adaptación se debe principalmente a la falta de recursos económicos, de habilidades y de competencia (Pierpaoli et al., 2013). Los mejores resultados de la aplicación de los SCA son el ahorro de insumos y el aumento de la producción Bragachini et al. (2010).
En cuanto a los sistemas de control ambiental, para los cultivos se cuenta con diferentes sistemas mecatrónicos para accionar a los diferentes equipos bajo techo de las instalaciones como invernaderos (Ponce, 2015), secadores (Garduño, 2017). Investigaciones realizadas por Hemming et al. (2006) y Zari (2011) explican el efecto de mallas de sombreo sobre invernaderos y su microclima. Moaid y Hashing (2013), realizaron el control de la velocidad de dos motores utilizando control en lazo cerrado, para ello utilizaron microcontroladores. Se desarrolló el control de sistema de riego con selección de los elementos, controladores, paneles, motores de los sistemas de las energías solares en agricultura (Martínez, 2015; Romantchik, 2013; Cebada, 2016).
Para la automatización y el control del sistema, se implementó un Programmer Logical Controler (PLC) ya que este controlador inteligente, es utilizado principalmente para el control automático de diferentes sistemas en todo tipo de industrias (Hernández, 2010). El PLC permite trabajar en entornos de condiciones adversas, lo cual lo hace óptimo para trabajar en el campo agrícola (Byron, 2005; Guzmán, 2015; Méndez, 2015) con el fin de controlar mediante sensores y motores diversos tipos de máquinas o procesos (Bolton, 2009).
La radiación solar es uno de los principales factores ambientales que afecta la vida en el planeta, ya que controla el funcionamiento de los ecosistemas terrestres tanto a través del control de procesos fotobiológicos (fotosíntesis, fotoperiodo) como por medio de su acción sobre otros factores ambientales (temperatura, humedad, etc.). Así como, es una pieza fundamental para procesos biológicos como la fotosíntesis, también un exceso de radiación puede perjudicar a la planta por el aumento de la temperatura ambiente estresando a la planta y puede causar una rápida maduración y deformación y daño de los frutos (Bastida, 2008).
El uso de la malla sombra es una estrategia utilizada para proteger a las plantas de la radiación solar directa, reducir la temperatura y evitar la quemadura de los frutos por el sol (Ayala-Tafoya, 2011, 2015). El uso de una malla fija disminuye la radiación en los días nublados, reduciendo la posibilidad de recibir una radiación adecuada en estos días. Mediante el empleo de mallas, se puede reducir entre 10 a 95% del total de la radiación solar. La cantidad de luz que se deja pasar al interior depende de la especie que se tenga en el cultivo y una malla sombra ideal debe ser un filtro selectivo que detenga la radiación en exceso sin afectar la parte visible o útil para la fotosíntesis (Juárez, 2011; Medina, 2012). Con las mallas no se evita el paso del agua de lluvia, además son permeables al viento, evitando el exceso de temperatura. El control automático para abrir y cerrar las mallas no puede realizarse mediante el uso de foto celdas o fototransistores ya que se saturan por lo que es necesario contar con un sensor de iluminación que alcance a medir 100 klux (Hahn, 2011).
El área cultivada con fresas a nivel nacional alcanzó 11 092 ha en el año 2016, de las cuales 57% de la producción es temporal, y el resto es de riego por gravedad, goteo y aspersión con un rendimiento de 42.5 t ha-1 (4.25 kg/m2) y 48% de la producción es para exportación. El sistema de producción de fresa en México es a campo abierto o involucra el uso de coberturas plásticas que sirven para proteger los frutos de las pudriciones y limitan el crecimiento de arvenses; no obstante, la cobertura plástica reduce la posibilidad de humedecimiento del suelo causado por la precipitación, por lo que es necesario que los agricultores instalen sistemas de riego.
La fresa es una fruta no climatérica, el proceso de su madurez y sazón es un proceso gradual pero continuo. Tiene una corta vida de anaquel. Las fresas contienen alrededor de 15% de sólidos y 85% de agua. Son muy sensibles a la cantidad de luz recibida durante su crecimiento. Con mucha radiación se aumenta la vaporización y con poca luz retarda su crecimiento. Las temperaturas altas provocan crecimiento vegetativo y las bajas inducen la floración (Gruda, 2005).
Las temperaturas adecuadas para la fresa son: temperaturas inferiores a 6 °C la planta satisface sus propios requerimientos de frio que necesita para interrumpir la dormición o letargo de las ramas. Durante la fase vegetativa, la temperatura óptima es de 20 °C aproximadamente en el día y 12 °C en la noche, si bien el retorno del frio se tolera sin sufrir daños. Las exigencias térmicas durante la fase de floración y maduración que se desarrollan de forma siempre óptima son a 25 - 26°C (Bianchi, 2000).
La fresa es la especie hortícola que más requerimientos nutritivos necesita, es por ello que demanda la siguiente formula de fertilización (Bianchi, 2000) nitrógeno: 80-150, anhídrido fosfórico: 50-100, óxido potásico: 100- 200, oxido cálcico: 60-80. En esta investigación se diseñó, construyó, programo y evaluó un sistema automático que permite controlar la apertura y cierre de las mallas sombra. Basada en la radiación directa en el cultivo de fresa, así como su riego.
Materiales y métodos
El trabajo se realizó en el Posgrado de Ingeniería Agrícola y Uso integral del Agua (IAUIA) de la Universidad Autónoma Chapingo (UACH) y las evaluaciones del SCA se realizaron en un campo experimental de energías renovables ubicado en Chapingo, Estado de México, México, a 19° 28' 40" latitud norte y 99° 00' 45" longitud oeste y altitud de 2 238 m sobre el nivel del mar. El suelo del sitio es del tipo Vertisol crómico FAO (2007), de color gris oscuro en seco y gris al humedecerse, cuyo drenaje superficial es regular.
Se desarrolló un SCA para el procesamiento de los datos, el manejo automático de la malla sombra y del riego. El SCA utiliza los siguientes componentes, un PLC Milleniun III XD26, que cuenta con 16 entradas digitales y 6 analógicas de 24 V, un sensor de luz LDR A106-300 marca Crouzet con un rango de medición de 1-3 000 lux, dos sensores de posición, con lo cual se indica que la malla está totalmente abierta o bien cerrada; como actuador del sistema utiliza el motor ERU-B de 24 V DC de 100W de potencia, con velocidad de 5.6 rpm y 80 Nm de torque.
Para que durante el día mida hasta 90000 lux se desarrolló un filtro para el sensor de la luz, y se determinaron los rangos máximos y mínimos para el sensor añadiendo una función de ganancia al programa del PLC, así se pudo determinar el rango máximo del sensor como 102 mV y el rango mínimo como 0. Esto significa que cuando el sensor detecta un valor de 102, la incidencia de radiación solar en el lugar será la máxima y cuando detecte un valor de 0, será la mínima incidencia posible. Una vez determinado los rangos, se prosiguió con ayuda de un luxómetro PCE-LED 20 a realizar la calibración del sensor, para ello se colocó el sensor con su filtro en diferentes lugares a diferentes valores de radiación solar y se tomaron los datos tanto del sensor como del luxómetro para así poder determinar una escala factible para el sensor.
El algoritmo de funcionamiento con programación para PLC permite abrir y cerrar la malla de acuerdo con las exigencias de un cultivo. Se utilizaron los siguientes valores de radiación solar para la evaluación del SCA: abrir con 600 W*m-2 y cerrar con 400 W*m-1. El tipo de programación es Functional Block Díagram (BDF), con funciones lógicas booleanas, así como, funciones numéricas y comparativas.
Se utilizó el puente H que consta de 4 relevadores para conectar el PLC con los motores, de tal forma que el PLC no se conecta directamente a los motores para evitar cualquier posible daño al PLC, ya que los motores, al ser forzados por alguna razón, pueden ocasionarlo. Con los relevadores el PLC activa o desactiva el motor para la apertura y el cierre de la malla y el motor de riego. Se usó una computadora para elaborar el programa con el software Millenium III e introducirlo al PLC.
Se instaló un módulo de un panel fotovoltaico y baterías para la alimentación del sistema, haciéndolo así más amigable con el ambiente al sistema y reduciendo la demanda energética del cultivo donde se instale, en este caso fresa. Los elementos del sistema fotovoltaico se seleccionaron con ayuda de un software (Romantchik, 2013). El experimento se pretende comprobar si el SCA funciona correctamente, de acuerdo con el algoritmo desarrollado: se cierra la malla con la radiación de 600 W/m2 y se abre con la de 400 W/m2, así como con el funcionamiento manual, y el control del riego.
Para tener la posibilidad de evaluar el SCA desarrollado y determinar el efecto de la luz y radiación sobre el crecimiento de las plantas de fresa (Fragaria sp.), se escogieron la variedad Chandler, la cual se cultiva comúnmente en el estado de México, se instaló un experimento de tres camas de10 x 3 m: de campo abierto, con la malla fija y malla móvil controlada automáticamente. En cada una de estas áreas se colocaron plantas de fresas para que estas sirvan como parte de la comparación. Se consultó los datos de radiación solar con la estación meteorológica de UACH en los días de experimento y se comparó con los datos de sensor de luz. Se colectó y midió cada 7 días las fresas de tres camas y se comparó durante dos y medio meses.
Así como se desarrolló un sistema de riego por goteo automático controlado por el mismo PLC y que consta de un tanque de 300 litros, un motor CA de 0.25 kW que aplica el agua y fertilizantes cada 20 min. Una vez que las plantas iniciaron la germinación, se aplicó al suelo de cada cama una mezcla de fertilizante comercial de alta solubilidad (valores en gramos por kilogramo de suelo seco, g. kg-1), así: N - 0.4; P2O5 - 0.03; K2O - 0.05; CaO - 0.0005; MgO - 0.0013; S - 0.00137; B - 0.0002; Cu - 0.00014; Fe - 0.00012; Mn - 0.0013; Mo - 0.00005 y Zn - 0.0002.
Se evaluó el tiempo de reacción del programa, esto es cuánto tarda en abrir y cerrar la malla sombra, así como en qué momentos del día está abierta y en cuales cerrada.
Después de haber comprobado el correcto funcionamiento del SCA, se destinaron los días 30 y 31 de mayo para supervisar durante todo el día cada hora a partir de las 8 de la mañana hasta las 7 de la noche, monitoreando la cantidad de radiación que marca el sensor y se comparó con la de la estación meteorológica de la UACH, además de revisar el estado de la malla si está abierta o cerrada y se comprobó de acuerdo a la radiación sí debería estar en ese estado.
Resultados y discusión
Desarrollo de los elementos del sistema de control, algoritmo y programa
En la Figura 1 se presenta el sistema de control automático de la malla sombra con sus elementos. El PLC cuenta con entradas analógicas y digitales, de las cuales, se utilizaron dos entradas digitales para conectar los dos sensores de proximidad y en una entrada analógica se conectó el sensor de luz. En las dos salidas se conectaron el motor de la malla sombra de tal forma que una salida es para la rotación del motor en sentido horario y la otra salida será para la rotación en sentido anti horario. También una salida se destinó para la conexión con el motor de riego a través de los relevadores. Además, se colocó un circuito (puente H), que conecta el PLC con los motores, que tiene la función de ser un interruptor y además proteger el PLC de cualquier sobrecarga por esfuerzo de los motores.

Figura 1 Esquema generar del sistema de control automático: A) malla sombra con motores; B) PLC; C) sensor de luz; D) sensores de posición; E) puente H; F) baterías; G) laptop; I) panel solar; H) controlador; y I) motor de riego.
Para la carga de los motores y el propio PLC, utilizando el software se seleccionó el panel fotovoltaico solar, dos baterías de descarga profunda y un regulador con las siguientes características: del panel - marca - solar one, modelo - HSL60P6-PB-4-245, de 24 V y de 245 W de potencia, de las baterías son las siguientes - marca- Steren, modelo - BR-1212, con 12 V por unidad, y de 110 Ah de capacidad; del Regulador de voltaje que se ocupó para cargar y descargar correctamente las baterías del sistema fotovoltaico, además de suministrar el voltaje correcta a las mismas evitando así una sobre carga - la marca fue ENESOL, de 24 V.
Después de la selección de los elementos del SCA se procedió al desarrollo de un sistema eléctrico, que consta de tres partes principales: la alimentación (a) el puente h y los motores; (b) y el control con las entradas; (c) como se muestra en la Figura 2.
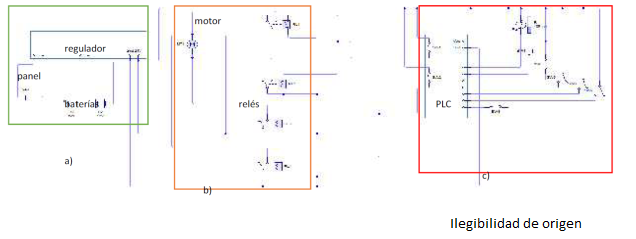
Figura 2 Esquema eléctrico. a) sistema de alimentación con panel y baterías; b) puente H con relevadores y motor; y c) PLC con sensor de luz y contactos finales.
El sistema de alimentación consta de tres componentes: banco de baterías, panel solar y regulador de voltaje. El control se realizó con un PLC Millenium, recibiendo las señales de un sensor de radiación (R1) y de dos sensores de posición del motor, además de un interruptor principal, y dos botones de apertura y cierre manual de la malla sombra, conectándose de la forma como se aprecia en la Figura 2 y mandando señales a dos salidas SW1 y SW2 para el motor de la malla (no se muestra la salida para el motor ni el riego). El principal elemento de control es el algoritmo de funcionamiento de la malla sombra (Figura 3) que se realizó de acuerdo de una lógica de funcionamiento que debía tener el programa que se desarrolló a partir de este.

Posteriormente se desarrolló el programa en el software Millenium III en un laptop, que después se cargaría al PLC. Al realizar el programa, además de lo que contenía el diagrama de flujo se lo añadió un algoritmo para el funcionamiento del sistema de riego para regar y fertilizar las plantas (Figura 4).

De acuerdo con la metodología se calibró el sensor de luz. Los datos obtenidos se muestran en el siguiente cuadro:
Cuadro 1 Resultados de calibración del sensor.
| Sensor | mV | 9 | 12 | 19 | 35 | 51 | 54 | 65 | 75 | 80 | 102 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Luxómetro | Lux | 9430 | 10700 | 20100 | 40100 | 55400 | 51600 | 70800 | 77500 | 78400 | 88000 |
Con estos datos se determinó la curva logarítmica por método numérico, para utilizar está función en la programación del PLC (Figura 5).

Una vez instalado el equipo de SCA se realizaron las mismas pruebas que en la simulación con la computadora, la apertura y el cierre automático por medio del sensor de radiación, así como con los botones de apertura y cierre manual, incluyendo la acción del botón de paro de emergencia, el cual detuvo toda actividad. El tiempo que se tardó en abrir y cerrar la malla sombra fue de 3.2 min para cada operación.
Para cerrar por completo la malla sombra, se aplicó en el eje donde se enrolla la malla sombra una tira adicional de esta (Figura 6). Un extremo de la tira se colocó en la estructura y el otro en el eje de la malla sombra, así esta se enrollará uniformemente sin obstruir el proceso de desenrollado o enrollado de la malla y ayudando perfectamente a que esta se extienda y cubra el área del cultivo.

Se realizaron las pruebas de apertura y cierre de la malla manualmente con los botones del tablero de control. Después se probó con el sensor, esto se realizó tapando el sensor para que detectara menos radiación y así abriera la malla hasta llegar al final y accionar al sensor de posición para que detuviera el motor, posteriormente se destapó el sensor y activándose el motor su cierre y este se detuvo al llegar al final por la activación del otro sensor de posición.
En los días 30 y 31 de mayo se realizó un registro de las mediciones de radiación del sensor para compararlo con las de la estación meteorológica de la UACH y a partir de ahí conocer la radiación incidente en cada cama, los datos se muestran en el Cuadro 2. Con los datos de radiación se realizaron dos gráficas (Figura 7), para comparar la radiación en las tres camas del cultivo. Se observa que las radiaciones solares son diferentes. Si se toma como 100% la radiación solar en la cama abierta, en la cama con malla fija siempre es 50%, pero en la cama con malla móvil es hasta 70%, mejorando la recepción de la radiación en los tiempos no máximos de radiación solar.
Cuadro 2 Radiación del día 30 y del día 31/05/2017 [W/m2].
| 30/05/2017 | 31/05/2017 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Hora | Sensor, mV | Estación | Malla automática | Malla fija | Estatus de la malla | Sensor, mV | Estación | Malla automática | Malla fija | Estatus de la malla |
| 08:00 | 8 | 87 | 87 | 43.5 | Abierta | 4 | 34 | 34 | 17 | Abierta |
| 09:00 | 21 | 205 | 205 | 102 | Abierta | 15 | 140 | 140 | 70 | Abierta |
| 10:00 | 14 | 140 | 140 | 70 | Abierta | 14 | 138 | 138 | 69 | Abierta |
| 11:00 | 61 | 600 | 300 | 300 | Cerrada | 25 | 247 | 247 | 123.5 | Abierta |
| 12:00 | 73 | 728 | 364 | 364 | Cerrada | 71 | 709 | 354.5 | 354.5 | Cerrada |
| 13:00 | 20 | 198 | 198 | 99 | Abierta | 45 | 454 | 227 | 227 | Cerrada |
| 14:00 | 78 | 768 | 384 | 384 | Cerrada | 43 | 426 | 213 | 213 | Cerrada |
| 15:00 | 60 | 599 | 299 | 299 | Cerrada | 14 | 137 | 137 | 68.5 | Abierta |
| 16:00 | 62 | 611 | 305 | 305 | Cerrada | 11 | 100 | 100 | 50 | Abierta |
| 17:00 | 9 | 94 | 94 | 47 | Abierta | 7 | 66 | 66 | 33 | Abierta |
| 18:00 | 15 | 153 | 153 | 76.5 | Abierta | 3 | 26 | 26 | 13 | Abierta |
| 19:00 | 3 | 25 | 25 | 12.5 | Abierta | 1 | 5 | 5 | 2.5 | Abierta |
| Total | 4208 | 2554 | 2104 | 2482 | 1687.5 | 1241 | ||||
| (%) | 100 | 60 | 50 | 100 | 69 | 50 | ||||

Figura 7 El cambio de radiación solar sobre el cultivo: izquierda - 30.05.2017, derecha - 31.05.2017
Las plantas de la cama con la malla fija tienen una deficiencia de radiación que implicara un menor rendimiento por planta; por otro lado, la cama que no cuenta con malla sombra recibe demasiada radiación, por lo cual la temperatura de la planta se incrementa generándole un mayor estrés lo que conlleva también a un menor rendimiento.
Las líneas A y B son los límites de control de la radiación en el campo con la malla móvil, cambiando sus valores se puede aumentar o disminuir la cantidad de radiación que recibe la fresa.
Las fresas se plantaron el día 12 de febrero, de 172 plantas en cada cama a al día 30 de mayo quedan las plantas que se muestran en el Cuadro 3. Como se puede observar el SCA nos ayudó a mantener más plantas con vida (94.5%), ya que estas presentan menos estrés al tener las condiciones más óptimas para la planta. Haciendo así que produzcan, dando como resultado una producción de 8.15 g por planta en el área donde se tiene la malla automática, 7.3 g por planta para la malla fija y 5.1 g por planta para la que no tiene malla, esto a partir del primer día de corte que fue el 29 de abril como se muestra en el Cuadro 4.
Cuadro 3 Porcentaje de plantas vivas (de 172 plantadas).
| Malla automática | Malla fija | Sin malla | |
|---|---|---|---|
| Plantas | 162 | 156 | 132 |
| Porcentaje | 94% | 90% | 76% |
Cuadro 4 Rendimiento por cama (g).
| Día | Malla automática | Malla fija | Sin malla |
|---|---|---|---|
| 29/04 | 100 | 70 | 25 |
| 06/05 | 130 | 100 | 80 |
| 13/05 | 180 | 150 | 120 |
| 20/05 | 240 | 180 | 200 |
| 28/05 | 770 | 720 | 270 |
| Total | 1 320 | 1 150 | 670 |
Los resultados obtenidos fueron que el programa actúa de manera concisa tal como se pretendía, abre y cierra de acuerdo a la radiación que el sensor mide, además de que permite abrir o cerrar la malla de manera manual. Abrir por si se requiere realizar alguna labor a la planta tales como deshierbe, cosecha y aplicación de algún agroquímico ya sea para control de plagas o malezas.
Con lo anterior, se cumple con uno de los objetivos de la investigación, el cual fue controlar una malla sombra con base en la radiación y con está controlar la radiación y la temperatura en el cultivo de la misma manera que quedó evidenciado: en los meses de junio y julio la utilización de las mallas mantuvo la temperatura por debajo de 25 °C (Hahn, 2011). Tenemos que bajo el área de la malla automática se obtuvo mayor rendimiento, además de mejor calidad comprobando igualmente lo dicho por Hahn (2011), que menciona que los frutos, en este caso jitomates, disminuyeron su peso por el aumento de temperatura en el aire sin malla.
Con esto se afirma que el control de la apertura y cierre de la malla sombra tiene bastantes beneficios ya que como se puede observar en los resultados, también se obtuvieron mejores rendimientos en el área donde se tenía el control de la malla sombra superando al rendimiento por planta donde no se contaba con dicho sistema, en el cual se obtuvieron menos cantidad de frutos y de la misma manera presentaban un menor tamaño. De tal forma el SCA de la malla sombra para fresa disminuyó la pérdida de las plantas 25% comparando con el campo abierto y 15% comparado con la malla fija.
La ganancia por la planta de 10.43% más que con la malla fija y de 37.42% en relación a la planta que no tiene malla, mientras que la ganancia por cama es 12.88% mayor que en la cama con malla fija y de un 49.25% mayor en comparación con la cama que no tiene malla. Por todo lo expuesto, podríamos inferir que este sistema de control automático no sólo se podría aplicar a los cultivos de fresa, sino también a una gran variedad de especies hortícolas, ya que controlando la radiación y temperatura ambiente donde se desarrollan proporciona un medio idóneo que mejora sustancialmente el rendimiento del cultivo, que a grandes rasgos se traduce en mayores ingresos para el productor.
Conclusiones
Se diseñó un SCA de malla sombra que puede controlar la radiación incidente en cualquier cultivo abriendo y cerrando una malla sombra por medio un motor de DC, el cual es controlado por un PLC de acuerdo a la señal obtenida por un sensor de radiación.
La alimentación del SCA se realizó con un sistema fotovoltaico solar, lo que le permite ser sustentable.
Se probó que la utilización de la malla móvil en función de la radiación mejora la producción de fresa.
El SCA está disponible para optimizar la radiación incidente en la producción de los cultivos agrícolas.

